
Level-Shift PWM Control of a Single-Phase Full H-Bridge Inverter for Grid Interconnection, Applied to Ocean Current Power Generation

 , , , , and
, , , , and 
Abstract
:1. Introduction
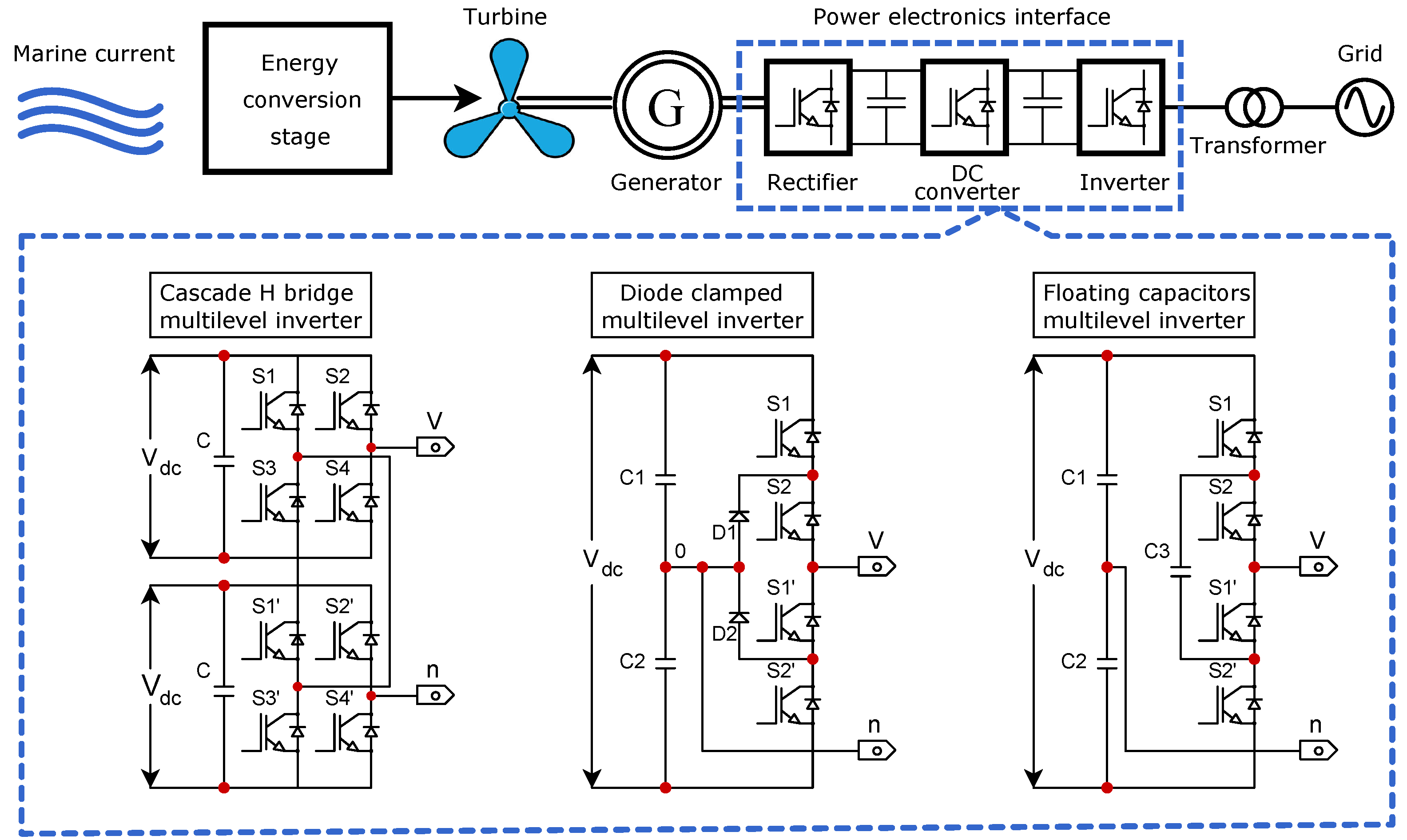
2. Marine Current Generation System Model
2.1. Turbine Model
2.2. Potential of Ocean Currents
2.3. Electrical Connection and Interconnections
3. Prototype Model
3.1. Prototype Specifications
3.2. Equipment and Test Conditions
4. Control Methods Applied
4.1. In-Phase Disposition (IPD) Control
4.2. Alternate-Phase Opposition–Disposition (APOD) Control
4.3. Phase Opposition–Disposition (POD) Control
5. Implementation of the Control Program
6. Analysis of Results
6.1. Results with IPD Control
6.2. Results with APOD Control
6.3. Results with POD Control
6.4. THD Results with Resistive Load
6.5. THD Results with Inductive-Resistive Load
7. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Worldometers. Current World Population. Available online: https://www.worldometers.info/world-population/ (accessed on 11 January 2022).
- REN21. Renewables 2020 Global Status Report. Available online: https://www.ren21.net/wp-content/uploads/2019/05/GSR2021_Full_Report.pdf (accessed on 10 January 2022).
- Tsao, C.C.; Feng, A.H.; Hsieh, C.; Fan, K.H. Marine current power with cross-stream active mooring: Part I. Renew. Energy 2017, 109, 144–154. [Google Scholar] [CrossRef]
- Aprendeconenergia. Aprovechamiento de la Energía Marina en el Mundo. Available online: https://www.aprendeconenergia.cl/aprovechamiento-de-la-energia-del-mar-en-el-mundo/ (accessed on 21 January 2022).
- Bai, G.; Li, W.; Chang, H.; Li, G. The effect of tidal current directions on the optimal design and hydrodynamic performance of a three-turbine system. Renew. Energy 2016, 94, 48–54. [Google Scholar] [CrossRef]
- Alcérreca-Huerta, J.C.; Encarnacion, J.I.; Ordoñez-Sánchez, S.; Callejas-Jiménez, M.; Gallegos Diez Barroso, G.; Allmark, M.; Mariño-Tapia, I.; Silva Casarín, R.; O’Doherty, T.; Johnstone, C.; et al. Energy yield assessment from ocean currents in the insular shelf of Cozumel Island. J. Mar. Sci. Eng. 2019, 7, 147. [Google Scholar] [CrossRef] [Green Version]
- Bárcenas Graniel, J.F.; Fontes, J.V.; Garcia, H.F.G.; Silva, R. Assessing hydrokinetic energy in the Mexican Caribbean: A case study in the Cozumel channel. Energies 2021, 14, 4411. [Google Scholar] [CrossRef]
- Shirasawa, K.; Tokunaga, K.; Iwashita, H.; Shintake, T. Experimental verification of a floating ocean-current turbine with a single rotor for use in Kuroshio currents. Renew. Energy 2016, 91, 189–195. [Google Scholar] [CrossRef]
- EMEC. European Marine Energy Centre (EMEC). Available online: http://www.emec.org.uk/ (accessed on 5 February 2022).
- Ropero, I.L. Técnicas de Modulación para Convertidores de Fijación por Diodos tres Niveles Multifase y Control Eficiente de Dispositivos Captadores de Energía de las Olas. Ph.D. Thesis, Universidad del País Vasco, Escuela Técnica Superior de Ingeniería de Bilbao, Biscay, Spain, 2015. [Google Scholar]
- Yassin, H.M.; Shafei, M.A.R. Active and Reactive Power Control of Marine Current Turbines with Flywheel Energy Storage System Using Meta-heuristic Technique. In Proceedings of the 2019 21st International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 17–19 December 2019; pp. 417–422. [Google Scholar]
- Pham, H.T.; Bourgeot, J.M.; Benbouzid, M.E.H. Comparative Investigations of Sensor Fault-Tolerant Control Strategies Performance for Marine Current Turbine Applications. IEEE J. Ocean. Eng. 2018, 43, 1024–1036. [Google Scholar] [CrossRef]
- Beltrán-Telles, A.; Monteagudo, F.L.; Beltrán-González, C. Energy quality analysis of CH-bridge inverter and SPWM control. Ing. Energ. 2020, 41, 1–11. [Google Scholar]
- Shahid, U.; Shafique, A.; Khan, I.; Rahman Kashif, S.A. Implementation of multilevel inverter using space vector pulse width modulation. Sci. Int. 2016, 28, 2451–2455. [Google Scholar]
- Maswood, A.I.; Tafti, H.D. Advanced Multilevel Converters and Applications in Grid Integration; Wiley: Chichester, UK, 2018. [Google Scholar]
- António-Ferreira, A.; Collados-Rodríguez, C.; Gomis-Bellmunt, O. Modulation techniques applied to medium voltage modular multilevel converters for renewable energy integration: A review. Electr. Power Syst. Res. 2018, 155, 21–39. [Google Scholar] [CrossRef] [Green Version]
- Hasan, N.S.; Rosmin, N.; Osman, D.A.A.; Musta’amal, A.H. Reviews on multilevel converter and modulation techniques. Renew. Sustain. Energy Rev. 2017, 80, 163–174. [Google Scholar] [CrossRef]
- Prabaharan, N.; Palanisamy, K. A comprehensive review on reduced switch multilevel inverter topologies, modulation techniques and applications. Renew. Sustain. Energy Rev. 2017, 76, 1248–1282. [Google Scholar] [CrossRef]
- Kala, P.; Arora, S. A comprehensive study of classical and hybrid multilevel inverter topologies for renewable energy applications. Renew. Sustain. Energy Rev. 2017, 76, 905–931. [Google Scholar] [CrossRef]
- McGrath, B.; Holmes, D. Multicarrier PWM strategies for multilevel inverters. IEEE Trans. Ind. Electron. 2002, 49, 858–867. [Google Scholar] [CrossRef]
- Chen, H.; Zhao, H. Review on pulse-width modulation strategies for common-mode voltage reduction in three-phase voltage-source inverters. IET Power Electron. 2016, 9, 2611–2620. [Google Scholar] [CrossRef]
- Asiminoaei, L.; Rodriguez, P.; Blaabjerg, F. Application of Discontinuous PWMModulation in Active Power Filters. IEEE Trans. Power Electron. 2008, 23, 1692–1706. [Google Scholar] [CrossRef]
- Nguyen, T.D.; Hobraiche, J.; Patin, N.; Friedrich, G.; Vilain, J.P. A Direct Digital Technique Implementation of General Discontinuous Pulse Width Modulation Strategy. IEEE Trans. Ind. Electron. 2011, 58, 4445–4454. [Google Scholar] [CrossRef]
- Prieto, J.; Jones, M.; Barrero, F.; Levi, E.; Toral, S. Comparative Analysis of Discontinuous and Continuous PWM Techniques in VSI-Fed Five-Phase Induction Motor. IEEE Trans. Ind. Electron. 2011, 58, 5324–5335. [Google Scholar] [CrossRef]
- Hava, A.; Kerkman, R.; Lipo, T. Carrier-based PWM-VSI overmodulation strategies: Analysis, comparison, and design. IEEE Trans. Power Electron. 1998, 13, 674–689. [Google Scholar] [CrossRef] [Green Version]
- Madorell, R.; Pou, J.; Zaragoza, J.; Rodriguez, P.; Pindado, R. Modulation Strategies for a Low-Cost Motor Drive. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006; Volume 2, pp. 1492–1497. [Google Scholar]
- Rus, D.C.; Preda, N.S.; Incze, I.I.; Imecs, M.; Szabó, C. Comparative analysis of PWM techniques: Simulation and DSP implementation. In Proceedings of the 2010 IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR), Cluj-Napoca, Romania, 28–30 May 2010; Volume 3, pp. 1–6. [Google Scholar]
- Artal-Sevil, J.S.; Dufo-López, R.; Bernal-Agustín, J.L.; Domínguez-Navarro, J.A. Asymmetrical multilevel inverter with staircase modulation for variable frequency drives in fractional horsepower applications. In Proceedings of the 2015 17th European Conference on Power Electronics and Applications (EPE’15 ECCE-Europe), Geneva, Switzerland, 8–10 September 2015; pp. 1–10. [Google Scholar]
- DOF. Código de Red de la Ley de la Industria Eléctrica. Available online: https://www.cenace.gob.mx/Docs/16_MARCOREGULATORIO/SENyMEM/(DOF%202016-04-08%20CRE)%20RES-151-2016%20DACG%20Código%20de%20Red.pdf (accessed on 15 January 2022).
- Rabinovici, R.; Baimel, D.; Tomasik, J.; Zuckerberger, A. Series space vector modulation for multi-level cascaded H-bridge inverters. Power Electron. IET 2010, 3, 843–857. [Google Scholar] [CrossRef]
- Ibrahim, Z.B.; Hossain, M.L.; Talib, M.H.N.; Mustafa, R.; Mahadi, N.M.N. A five level cascaded H-bridge inverter based on space vector pulse width modulation technique. In Proceedings of the 2014 IEEE Conference on Energy Conversion (CENCON), Johor Bahru, Malaysia, 13–14 October 2014; pp. 293–297. [Google Scholar]
- Maaroof, H.S.; Al-Badrani, H.; Younis, A.T. Design and simulation of cascaded H-bridge 5-level inverter for grid connection system based on multi-carrier PWM technique. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1152, 012–034. [Google Scholar] [CrossRef]
- Ismail, B.; Hassan, S.I.S.; Ismail, R.C.; Haron, A.R.; Azmi, A. Selective Harmonic Elimination of Five-level Cascaded Inverter Using Particle Swarm Optimization. Int. J. Eng. Technol. 2013, 5, 5220–5232. [Google Scholar]
- Selvaperumal, S.; Sivagamasundari, M.S. Cascaded H-Bridge Five Level Inverter Based Selective Harmonic Eliminated Pulse Width Modulation for Harmonic Elimination. Int. J. Electr. Comput. Eng. 2019, 13, 110–114. [Google Scholar]
- Sadoughi, M.; Pourdadashnia, A.; Farhadi-Kangarlu, M.; Galvani, S. Reducing Harmonic Distortion in a 5-Level Cascaded H-bridge Inverter Fed by a 12-Pulse Thyristor Rectifier. In Proceedings of the 2021 IEEE Kansas Power and Energy Conference (KPEC), Manhattan, KS, USA, 19–20 April 2021; pp. 1–5. [Google Scholar]
- Qi, C.; Zagrodnik, M.; Tu, P.; Wang, P. The Random Nearest Level Modulation Strategy of Multilevel Cascaded H-Bridge Inverters. IET Power Electron. 2016, 9, 2706–2713. [Google Scholar] [CrossRef]
- Matsa, A.; Ahmed, I.; Chaudhari, M. Optimized Space Vector Pulse-width Modulation Technique for a Five-level Cascaded H-Bridge Inverter. J. Power Electron. 2014, 14, 937–945. [Google Scholar] [CrossRef] [Green Version]
- Hydro, A. ANDRITZ HYDRO Hammerfest. Available online: https://www.andritz.com/resource/blob/31444/cf15d27bc23fd59db125229506ec87c7/hy-hammerfest-data.pdf (accessed on 28 May 2021).
- Sneha, A.; Rajitha, R. dc-dc converter topologies for battery electric vehicles interface. Int. Res. J. Mod. Eng. Technol. Sci. 2020, 12, 1269–1276. [Google Scholar]
- El-Hosainy, A.; Hamed, H.A.; Azazi, H.Z.; El-Kholy, E.E. A review of multilevel inverter topologies, control techniques, and applications. In Proceedings of the 2017 IEEE Nineteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 19–21 December 2017; pp. 1265–1275. [Google Scholar]
- Reyes-Severiano, Y.; Aguayo-Alquicira, J.; de León-Aldaco, S.E.; Carrillo-Santos, L.M. Comparative analysis of PD-PWM technique in the set: Multilevel Inverter-Induction motor. Ing. Investig. Tecnol. 2020, 21. [Google Scholar] [CrossRef] [Green Version]
- Ramos, G.; Melo-Lagos, I.D.; Cifuentes, J. High performance control of a three-phase PWM rectifier using odd harmonic high order repetitive control. Dyna 2016, 83, 27–36. [Google Scholar] [CrossRef]
- Khaburi, D.A.; Nazempour, A. Design and simulation of a PWM rectifier connected to a PM generator of micro turbine unit. Sci. Iran. 2012, 19, 820–828. [Google Scholar] [CrossRef] [Green Version]
- Ammar, A. Power Quality Improvement of PWM Rectifier-Inverter System Using Model Predictive Control for an AC Electric Drive Application; Springer: Singapore, 2020; pp. 427–439. [Google Scholar]
- Lakshmi, P.; Ramalingam, S.; Muthuselvan, N.; Sridharan, H. Topology Evaluation of High Gain DC-DC Converters for Photovoltaic Application 1. Int. J. Electron. Electr. Eng. 2019, 7, 62–67. [Google Scholar]
- Donadi, A.K.; Jahnavi, W.V. Review of DC-DC Converters in Photovoltaic Systems for MPPT Systems. Int. Res. J. Eng. Technol. 2019, 6, 1914–1918. [Google Scholar]
- Streit, L.; Janik, D.; Talla, J. Serial-Parallel IGBT Connection Method Based on Overvoltage Measurement. Elektron. Elektrotech. 2016, 22, 53–56. [Google Scholar] [CrossRef] [Green Version]
- Rahman, S.; Meraj, M.; Iqbal, A.; Prathap-Reddy, B.; Khan, I. A Combinational Level Shifted and Phase Shifted PWM Technique for Symmetrical Power Distribution in CHB Inverters. IEEE J. Emerg. Sel. Top. Power Electron. 2021. [Google Scholar] [CrossRef]
- Rezini, S.; Azzouz, Z. Contribution of multilevel inverters in improving electrical energy quality: Study and analysis. Eur. J. Electr. Eng. 2021, 23, 255–263. [Google Scholar] [CrossRef]
- Kozakevych, I.; Siyanko, R. Research of modular multilevel converter with phase-shifted pulse-width modulation. E3S Web Conf. 2021, 280, 05009. [Google Scholar] [CrossRef]
- Hassan, A.; Yang, X.; Chen, W.; Houran, M.A. A State of the Art of the Multilevel Inverters with Reduced Count Components. Electronics 2020, 9, 1924. [Google Scholar] [CrossRef]
- Ling, Y. On current carrying capacities of PCB traces. In Proceedings of the 52nd Electronic Components and Technology Conference 2002. (Cat. No.02CH37345), San Diego, CA, USA, 28–31 May 2002; pp. 1683–1693. [Google Scholar]
- Alldatasheet. 1MBH50D-060S Datasheet Fuji Electric. Available online: https://www.alldatasheet.com/datasheet-pdf/pdf/422332/FUJI/1MBH50D-060S.html (accessed on 2 February 2022).
- Mnati, M.J.; Abed, J.K.; Bozalakov, D.V.; Van den Bossche, A. Analytical and calculation DC-link capacitor of a three-phase grid-tied photovoltaic inverter. In Proceedings of the 2018 IEEE 12th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG 2018), Doha, Qatar, 10–12 April 2018; pp. 1–6. [Google Scholar]
- Tamasas, M.; Saleh, M.; Shaker, M.; Hammoda, A. Evaluation of modulation techniques for 5-level inverter based on multicarrier level shift PWM. In Proceedings of the 2014 17th IEEE Mediterranean Electrotechnical Conference (MELECON 2014), Beirut, Lebanon, 13–16 April 2014; pp. 17–23. [Google Scholar]
- Solangi, A. Power Quality Analysis of Solar Photovoltaic fed cascaded H-bridge five level inverter. Int. J. Electr. Eng. Emerg. Technol. 2019, 2, 17–22. [Google Scholar]
- Soomro, J.; Qasmi, E.A.; Chachar, F.A.; Ansari, J.A.; Soomro, S.A. Comparative analysis of level shifted PWM techniques for conventional and modified cascaded seven level inverter. In Proceedings of the 2018 International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 3–4 March 2018; pp. 1–6. [Google Scholar]
- Khanfara, M.; El Bachtiri, R.; Mohammed, B.; el Hammoumi, K. A multicarrier PWM technique for five level inverter connected to the grid. Int. J. Power Electron. Drive Syst. 2018, 9, 1774–1783. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Capacity | 3.9 kW |
| Input voltage | 600 (per source) |
| Input current | 6.5 A (per source) |
| Output frequency | ≃60 Hz |
| Efficiency () | ≃88% |
| Dimensions | 120 mm × 160 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garcia-Reyes, L.A.; Beltrán-Telles, A.; Bañuelos-Ruedas, F.; Reta-Hernández, M.; Ramírez-Arredondo, J.M.; Silva-Casarín, R. Level-Shift PWM Control of a Single-Phase Full H-Bridge Inverter for Grid Interconnection, Applied to Ocean Current Power Generation. Energies 2022, 15, 1644. https://doi.org/10.3390/en15051644
Garcia-Reyes LA, Beltrán-Telles A, Bañuelos-Ruedas F, Reta-Hernández M, Ramírez-Arredondo JM, Silva-Casarín R. Level-Shift PWM Control of a Single-Phase Full H-Bridge Inverter for Grid Interconnection, Applied to Ocean Current Power Generation. Energies. 2022; 15(5):1644. https://doi.org/10.3390/en15051644
Chicago/Turabian StyleGarcia-Reyes, Luis A., Aurelio Beltrán-Telles, Francisco Bañuelos-Ruedas, Manuel Reta-Hernández, Juan M. Ramírez-Arredondo, and Rodolfo Silva-Casarín. 2022. "Level-Shift PWM Control of a Single-Phase Full H-Bridge Inverter for Grid Interconnection, Applied to Ocean Current Power Generation" Energies 15, no. 5: 1644. https://doi.org/10.3390/en15051644
APA StyleGarcia-Reyes, L. A., Beltrán-Telles, A., Bañuelos-Ruedas, F., Reta-Hernández, M., Ramírez-Arredondo, J. M., & Silva-Casarín, R. (2022). Level-Shift PWM Control of a Single-Phase Full H-Bridge Inverter for Grid Interconnection, Applied to Ocean Current Power Generation. Energies, 15(5), 1644. https://doi.org/10.3390/en15051644