1. Introduction
The V2X environment poses many challenges to emerging wireless communication systems, while it is crucial to ensure the efficiency and safety of road users. It is for this reason that intelligent transportation systems (ITSs) [
1] have been meticulously studied and standardized over the past decade. High reliability in dense networks and low latency in high-mobility environments are the main requirements of each ITS standard from LTE-V2X to ITS-G5. However, these new solutions have been unable to fulfill the necessary specifications of V2X communication as they suffer from a huge performance degradation in high-mobility environments and high-density geographical areas. With these challenges in mind, researchers and industrialists around the globe focused further on 5G as a flexible network where spectral efficiency, low latency, and reliability are new requirements to fulfill.
In addition to that, the vehicular environment requires continual localization of the surroundings and accurate obstacle detection to fully guarantee the safety of road users. This imposes another challenge to the driver-assistance field given that we are overly limited in terms of frequency bands and resources. Hence, pooling of the available frequency resources between different applications and users can help increase the spectral efficiency. The use of new 5G access techniques, waveforms, and architecture is evidently necessary in order to develop a new collaborative approach multiplexed in the time domain, namely RadCom, that can be described as a joint radar and communication system that performs both vehicle-to-everything communication and detection of the neighboring obstacles in the vehicular environment [
2,
3,
4].
According to the authors of this survey [
5], there exist many levels of integrating a joint radar-communication system. First, a full-isolation category consists of physically isolating or co-locating the radar and communication components, which results in one transmitter interfering with the other. Another approach to the integration of the RadCom system is the co-existence approach, in which the transceivers of the sub-systems consider each other as interferers. Hence, advanced mitigation techniques are needed in order to eliminate interference caused by radar-communication transceivers, which increases the overall complexity. Another approach exists based on shared knowledge; namely cooperative integration. Mainly, both the communication system and radar system send mutual information in order to improve the overall performance, especially interference mitigation. Finally, there is the co-design approach that we adopt in our research, in which the transmitters and receivers of both systems are jointly designed. This implies that the available resources are shared in either the time domain or the frequency domain (or both), which increases the spectral efficiency.
The co-design RadCom concept attracted many researchers in the early 2000s [
6,
7], where many field experts proposed OFDM as a multi-carrier waveform that efficiently allows the use of the available resources; hence, it satisfied the requirements of both RadCom subsystems [
8]. Although the OFDM waveform offers simple and independent velocity and distance estimation, the growing nature of the vehicular environment causes performance loss due to high mobility, thereby causing inter-carrier interference (ICI). Moreover, in order to avoid inter-symbol interference (ISI), a long cyclic prefix (CP) is padded to the signal causing a significant spectrum loss [
9].
However, UFMC, as a new emerging waveform, offers improved spectrum use and better localization in the frequency domain [
10,
11]. In fact, the use of the UFMC improves the spectral efficiency due to the suppression of the cyclic prefix used by OFDM; thus, it improves the data rate. In addition to that, the UFMC achieves low out-of-band emissions while retaining the simplicity of OFDM. In fact, the UFMC offers all these previously cited advantages only by applying a simple filter; hence, in terms of complexity, the UFMC is slightly higher than OFDM. Moreover, being a simple filtered version of the OFDM waveform adds ease of implementation to MIMO techniques if needed [
12]. Therefore, UFMC is proposed as a RadCom multicarrier waveform in our paper [
13], compared to OFDM RadCom, and it proved to be suitable for this application by means of simulations while offering great radar and communication performance.
The system parameters adopted in our simulations were held on the 77 GHz carrier frequency whereas other parameters can be adopted to enhance the system performance. Thus, in this paper, we investigate the OFDM-based RadCom and our proposed UFMC-based RadCom scheme under the 24 GHz ISM band with different system parameters in a vehicular environment and conduct performance comparisons of both carrier frequencies in order to meet proper requirements for the RadCom application.
The rest of the paper is organized as follows.
Section 2 details the signal propagation model, the OFDM RadCom signal model, and the UFMC RadCom signal model. In
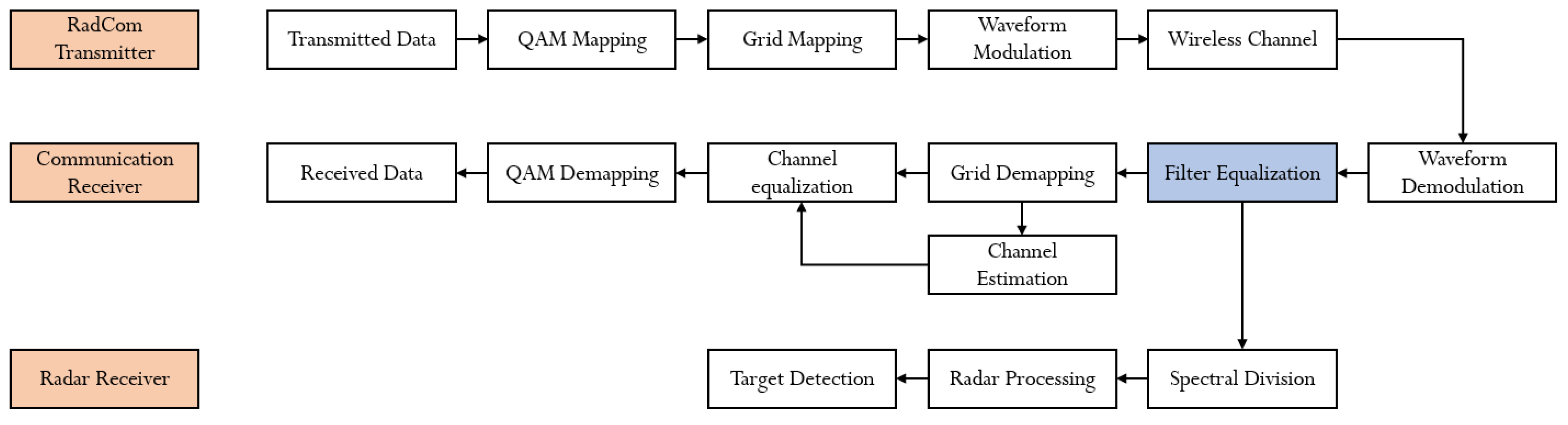
Section 3 we detail the RadCom system block diagram, more specifically the radar receiver block diagram. We dedicate
Section 4 to studying the system parametrization. In
Section 5, simulations and some discussions are presented for both frequency bands. Finally, the conclusions are given in
Section 6.
2. Signal Propagation
As previously detailed in [
13], the counterpart of the passband transmitted signal
can be expressed as follows:
where
is the carrier frequency,
denotes the number of propagation paths
, and
is the time-varying channel gain associated to the
l-th path. This model also accounts for the multi-target case.
Hence, the time-varying delay due to the varying motion between the RadCom system and the targeted vehicle is given by the following expression:
where
c is the speed of light and
d is the distance between the RadCom transmitter and the targeted vehicle at
.
v is the relative speed at
[
14]. It should be mentioned that in this case, acceleration and higher-order motion have been ignored. We introduce the parameter
to model both the communication system and the radar using the same equation. In this case:
and the received signal can be written as follows:
where
is a constant delay and
is the motion-induced frequency shift, also known as the Doppler shift (Doppler shift is a function of the carrier frequency and angle of arrival
of the
l-th path, such that
[
15],
is the maximum shift in this case). The term
is known as the time-scale factor [
16].
Based on Equation (
3), we can conclude that the received signal is a sum of attenuated, Doppler-shifted, time stretched/compressed and phase-shifted delayed copies of the transmitted signal. Phenomena of multi-path propagation considering Doppler effects can be modeled as a convolution with a filter, given as:
Equation (
4) is the impulse response of the channel.
2.1. OFDM RadCom Signal Model
Let
be the transmitted OFDM signal:
is the OFDM symbol length.
denotes the CP length needed to avoid ISIs. The received OFDM signal is a convolution between
and the discrete presentation of the impulse response of the channel; it can be expressed as:
where
denotes additive Gaussian noise with variance
. Further details are provided in [
13].
2.2. UFMC RadCom Signal Model
The UFMC discrete-time baseband signal is the superposition of the subband wise filtered subcarriers [
17], therefore it can be expressed as follows:
where
S is the total number of subbands of length
Q subcarriers for each one. ⊗ denotes linear convolution and
is the filter used in the
s-th subband. It is defined as in (
7):
with
being the prototype filter of length
L and
denoting the starting frequency of the lowest subband.
is the
sth group of subcarriers. It is an OFDM symbol shifted to the appropriate subband. It is given by (
8):
where
are the complex symbols transmitted on the
q-th subcarrier in the
s-th subband during the
r-th period. They are spread over the overall signal and transformed to time domain, with an IDFT of length
. The term
performs frequency shifting of both the data and filter coefficients to the appropriate subband. Because of the convolution, the resulting UFMC signal is of length
. The filtering operation makes it possible to suppress the OOB leakages, with the Dolph–Chebyshev filter being the most common one in the literature [
17].
Replacing (
7) and (
8) in (
6), and applying some simplifications, the transmitted UFMC signal can be written as in (
9):
with
being the prototype filter shifted to the subband center frequency [
17]. Considering the same channel model as for OFDM, the received UFMC signal can be expressed as follows:
Figure 1 depicts the synthesis of a UFMC signal. In the following section, we explain how to use the two waveforms in the radar context.
4. Waveform Parameterization
One of the main challenges of the RadCom system is the system parametrization. In fact, the radar and communication subsystems have different requirements in which one can directly affect the performance of the other. Hence, optimal system parametrization cannot be achieved.
The Time Guard adopted by the modulation system must be restricted to some constraints. First, it needs to be larger than the time of a round trip of the furthest target and larger than the time separating the first received signal and its last path:
where
corresponds to the range of the furthest object and
c is the speed of light.
is the maximum excess delay. The first condition in Equation (
18) is crucial in order to preserve orthogonality in the time domain. However, the second condition is essential for the communication subsystem of the RadCom system to avoid ISI.
The second parameter that affects both the radar and communication subsystems is the subcarrier spacing
. In fact, the subcarrier spacing helps preserve the orthogonality of the system in the frequency domain, hence it needs to be greater than the maximum Doppler shift
that can be induced to the signal. This can be expressed as follows:
The distance resolution is determined by the bandwidth
B and given by [
18]:
As for the velocity resolution, it is determined by the time of the symbol frame
:
Hence, the maximum unambiguous distance is determined by the subcarrier spacing
as follows:
Furthermore, the maximum unambiguous velocity can be written as:
Note that is the observation time.
5. Simulation Results
In this section, we present the simulation results of the OFDM-based RadCom system as well as the UFMC-based RadCom system under 2 different parameters. It is worth noting that the key parameters of any configuration are mainly based on the symbol duration
, the subcarrier spacing
, and the carrier frequency
. Hence, we chose to adopt the first system detailed in [
19] in which the transmission is carried on the frequency
GHz ISM band. The system parameters are presented in
Table 1. As for the channel impulse response, it is generated based on the reflection of the target using Equation (
12), where each path is considered as the reflection of one target. We calculate the delay and the Doppler shift based on the distance and the velocity that we fix for each target.
Based on the velocity resolution , we rearranged the multi-carrier grid and we set the number of symbols to 259 symbols in order to guarantee an equal number of symbols per time slot.
For targets, we chose to simulate 6 targets in which two targets shared the same distance and very close velocities to verify the velocity resolution. Target one is at a distance
m with velocity
m/s; target two is at the same distance
m and
m/s. Moreover, we needed to investigate the distance resolution; thus, we first simulated two targets at the same velocity
m/s and with a range difference smaller than the distance resolution
. We simulated two other targets at the same velocity
m/s and with a range difference slightly over the distance resolution. The last target is a non-moving target at a distance
m and was simulated in order to investigate the detection of fixed objects such as traffic lights and fire hydrants. The following
Table 2 summarizes the simulated targets:
For the UFMC waveform, we used a Dolph–Chebyshev filter with an attenuation of 50 dB and the parameters adopted in this case were sub-band size and filter length L fixed at 16 for optimal performance.
Figure 4 illustrates the simulation results of both OFDM and UFMC RadCom systems over the carrier frequency
GHz configuration. As depicted in the periodogram, both multicarrier waveforms support the radar application with the parameters of
Table 1. Moreover, at a velocity resolution
m/s, the two objects generate peaks in the periodogram; hence, they are both detectable. As for the separability of adjacent objects, target three and target four with
m and
m, respectively, respect the minimum distance of detection; hence, both objects appear on the periodogram. However, for targets five and six, the range difference is smaller than the distance resolution. This is translated on the periodogram with one peak; thus, a detected obstacle. As for the last target, it is proved that both waveforms are able to detect static objects within the detection range.
The second part of our simulation consisted of examining the OFDM RadCom and UFMC RadCom systems over the 77 GHz ISM band. In [
13], the system parameters were chosen following the conditions presented in
Section 4. The following
Table 3 sums up the system parameters:
As can be noted, the difference between the two system parameters is significant. First, by increasing the subcarrier spacing
and the number of subcarriers
, we increase intrinsically the total bandwidth
B, guaranteeing a higher throughput for the communication aspect of our RadCom system. As for the radar part, the maximum detection distance
is significantly reduced in order to respect the first criterion in
Section 4 while we enhance both the distance resolution and velocity resolution,
and
, respectively. Consequently, we reduce the range of the back-scatters in such a manner that it does not exceed the maximum distance of detection while investigating the performance of our RadCom system. Mainly, we maintain the first two targets at the same distance and different velocities to review the velocity resolution. For the last target, we test the probability of detection of static objects. Finally, we use four other objects to examine the range resolution.
As depicted in
Figure 5, all targets generate peaks in the distance–velocity grid with different amplitudes. This is due to the attenuation induced by the distance separating the obstacles and the vehicles. Consequently, the seventh target, which is at the maximum distance of detection
, is barely distinguishable in the 2D-periodogram. Furthermore, with the reduced distance resolution
that the 77 GHz system offers, targets three and four are both detectable as illustrated in the magnified figure for both OFDM and UFMC RadCom systems, whereas it is not possible to distinguish two adjacent objects with a separating distance of 1 m for the 24 GHz ISM band. In addition to that, the UFMC waveform increases spectral efficiency due to the omission of CP and reduces the high OOB power emission without any additional computational complexity.
Furthermore, we should keep in mind that the cost of implementation of these ISM bands differs. In fact, the 77-GHz-based system is highly costly compared to the 24 GHz frequency, while it is still under investigation. Despite the fact that 24 GHz system is less expensive, it suffers from distance–velocity resolution performance loss for far objects due to the deteriorated channel conditions. This implies that for the 77 GHz radar system, the precision of detection, hence the resolution, will not decrease since the maximum detection is at 200 m, which is less important than 1650 m for the 24 GHz radar. In addition to that, the total bandwidth B of both systems impacts directly the communication aspect of the RadCom system. A larger bandwidth increases the transmission throughput; hence, the 77 GHz ISM band offers a higher data rate. Thus, we conclude that for an application that requires precise resolution and short-range detection, we recommend the 77 GHz system. As for the 24-GHz-based system, it supports both short-range and long-range detection at the cost of poor resolution for far-off objects.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}