
Performance Analysis of a Hybrid Electric Ship by Real-Time Verification





Abstract
:1. Introduction
- The development of a high-fidelity benchmark for hybrid-electric vessels using diesel generators and batteries. This benchmark consists of detailed models, for which the parameters are provided, thus enabling the models to be reproduced on other platforms.
- The validation of the proposed hybrid-electric ship topology and control system using real-time HIL simulations on a Typhoon HIL402 platform.
- The incorporation of the maximum degree of complexity allowed by the HIL platform. The electrical topology of the proposed benchmark has not been commonly employed in previous studies using HIL technology, probably because the complexity of the models has stretched the computational capacity of commercially available HIL platforms. To circumvent this limitation, previous studies have often simplified parts of the model (e.g., reducing the system from three-phase to one-phase, averaging power converters, etc.), to allow the inclusion of more elements in the system while neglecting some phenomena that can appear in the real world.
- The application of the EMS to maritime transport. Although the proposed system itself is not novel (in that it follows the rule-based strategy used in commercial hybrid-electric vehicles), it has never before been implemented in ships, nor has its performance been validated by HIL technology.
2. Materials and Methods
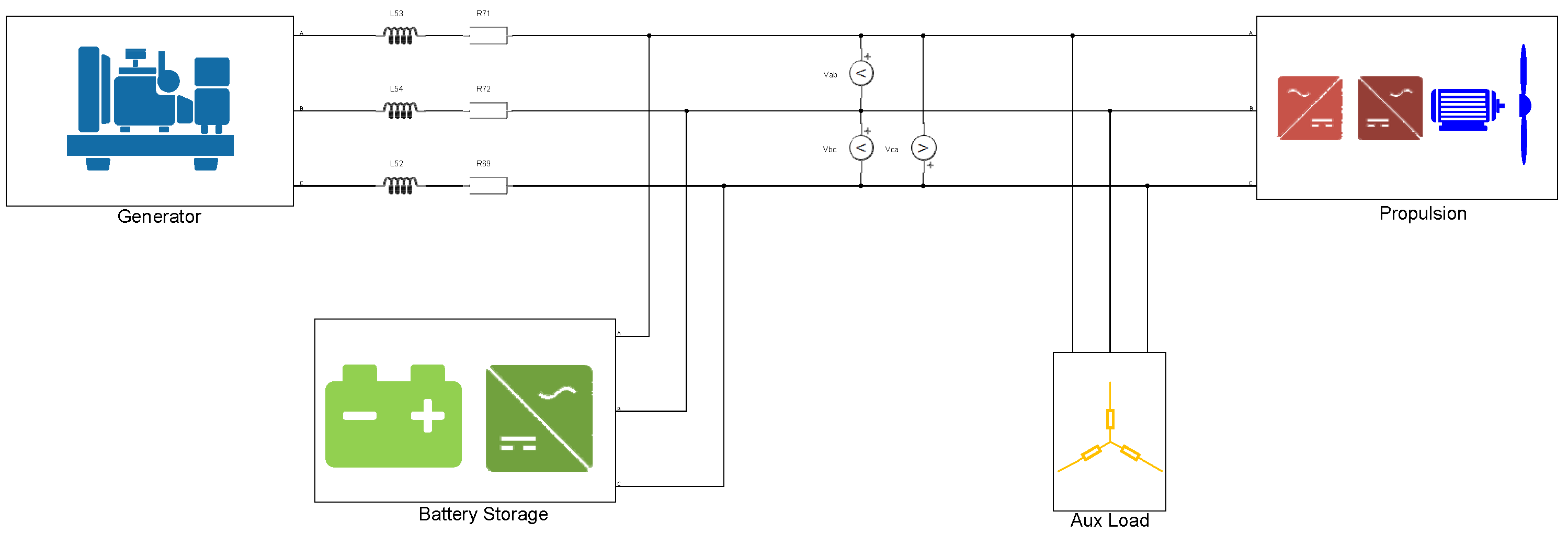
2.1. Ship Propulsion System Architecture
2.2. Modelling the Components of the Electric Power System
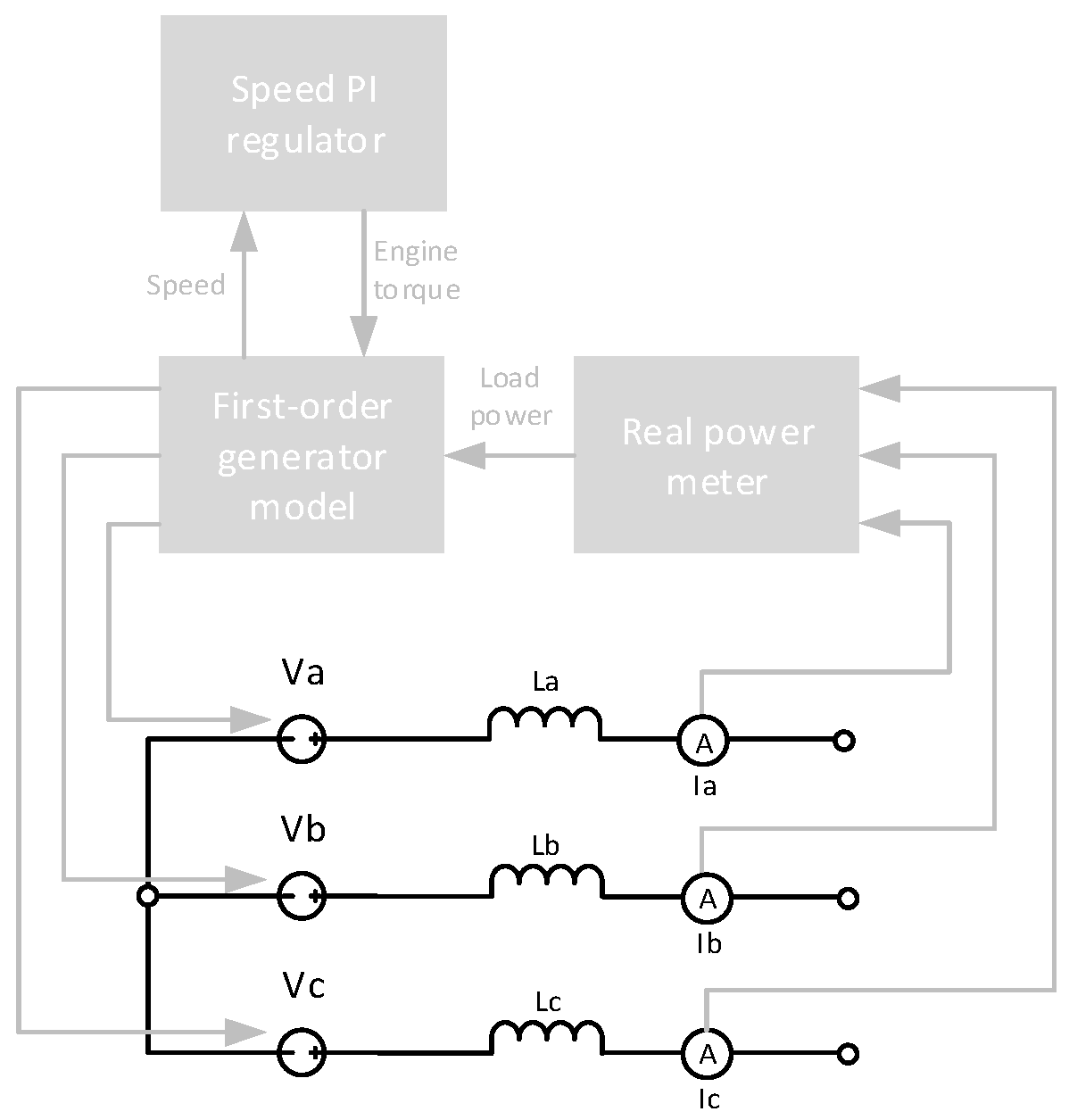
2.2.1. Diesel Generator
2.2.2. Battery Storage System
2.2.3. Auxiliary Load
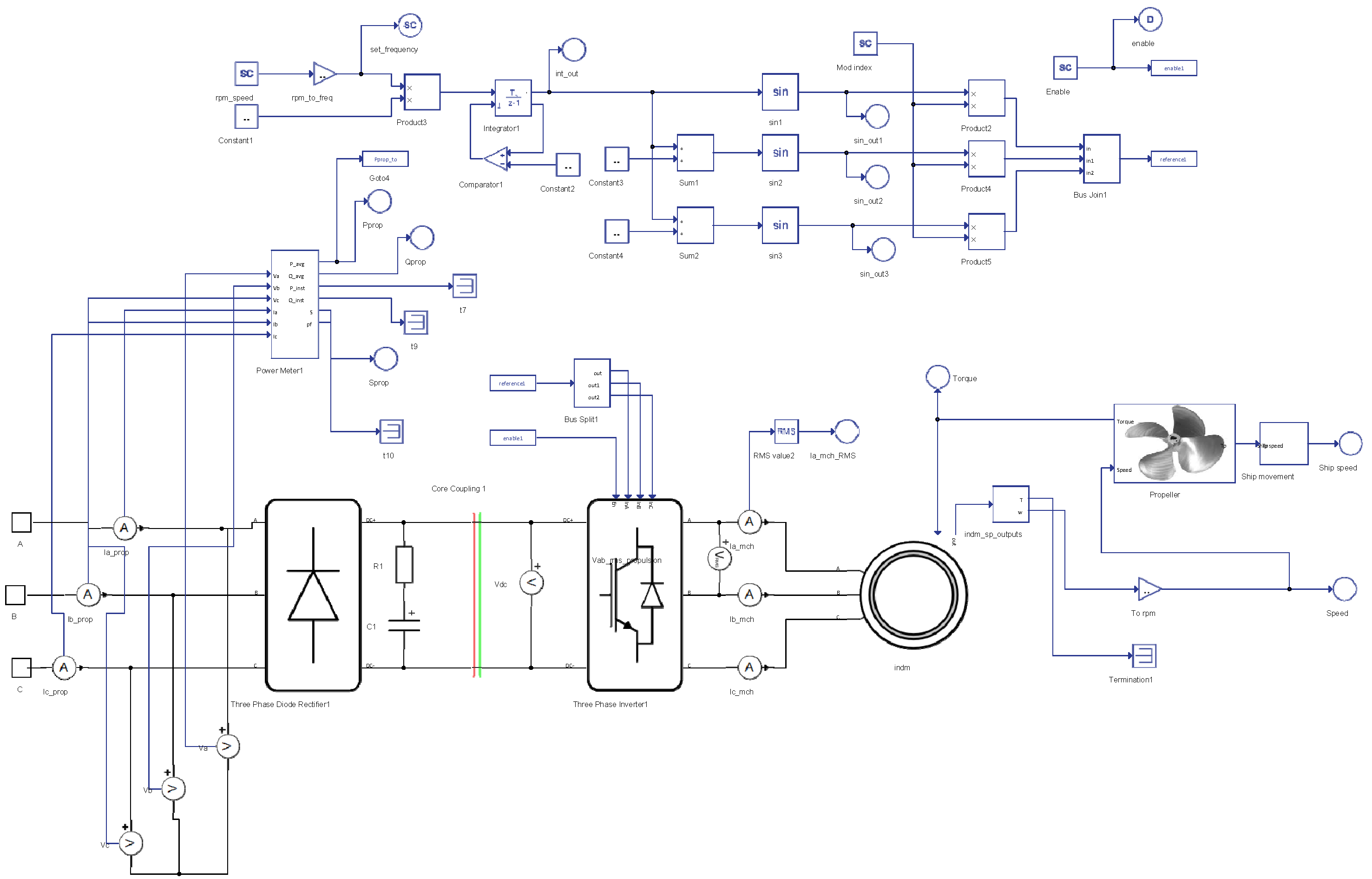
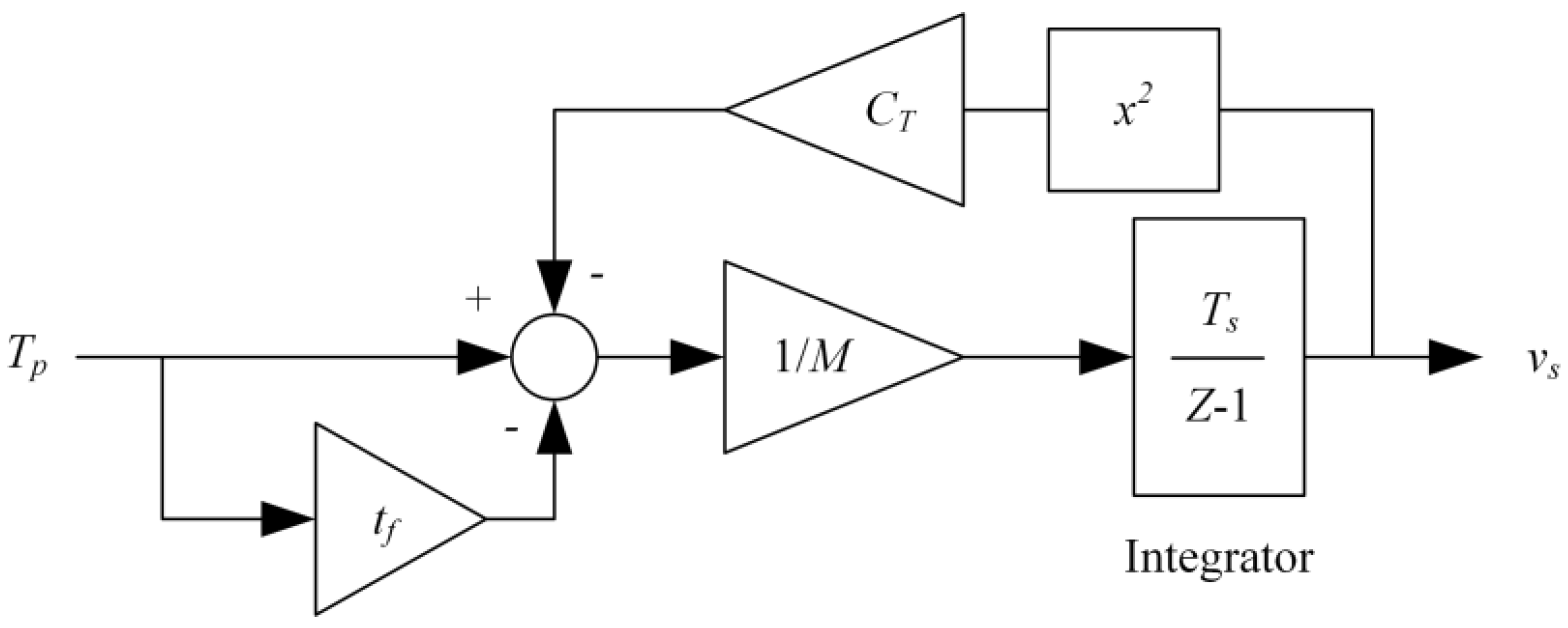
2.2.4. Propulsion System
2.3. Energy Management System
- SOCmin is a minimum SOC, set to avoid damaging the battery through excessive discharge. It is common to choose values between 30 and 50% for this parameter.
- SOCmed is a level of SOC, set to keep the battery working within its optimum range of operation.
- SOCmax is the maximum SOC, set to avoid damaging the battery as a result of overcharging.
- Pload is the power required by the ship’s loads, including the auxiliary load and the propulsion load.
- Peng,max is the maximum power that can be delivered by the diesel generator.
- vlimit is the speed at which the diesel engine is turned on. It is common for hybrid vehicles to use batteries for low speeds to prevent the diesel engine from working in its low-efficiency zone.
- f1 is the fraction of the required power supplied by the battery when its SOC is within its operational limits.
- f2 is the fraction of the maximum power of the diesel generator below which the engine should be turned off because its efficiency decreases abruptly.
- Pchg is the charging power supplied to the batteries when its SOC is under SOCmin. This corresponds to a surplus of power generated by the diesel engine versus the required power.
3. Results
3.1. Case Study 1: Stationary Operation
3.1.1. Scenario A: Ship Working at Full Power + Battery with Normal SOC
3.1.2. Scenario B: Ship Working at Full Power + Battery with High SOC
3.1.3. Scenario C: Diesel Engine Supplying the Loads and Charging the Battery
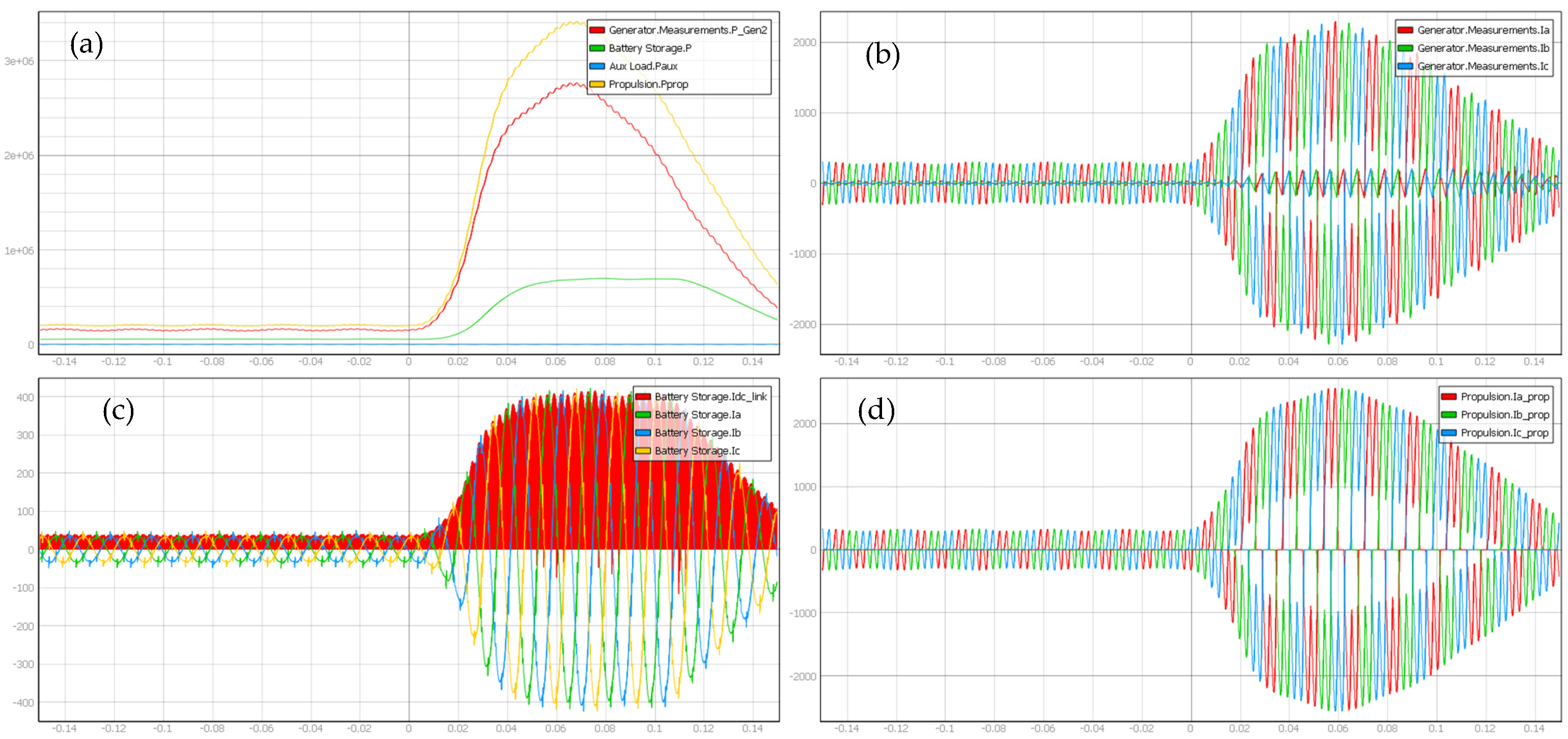
3.2. Case Study 2: Transient Operation
3.2.1. Scenario A: Speed Step Command
3.2.2. Scenario B: Switching on the Battery Charging
3.2.3. Scenario C: From Battery Supply to Diesel Generator Supply
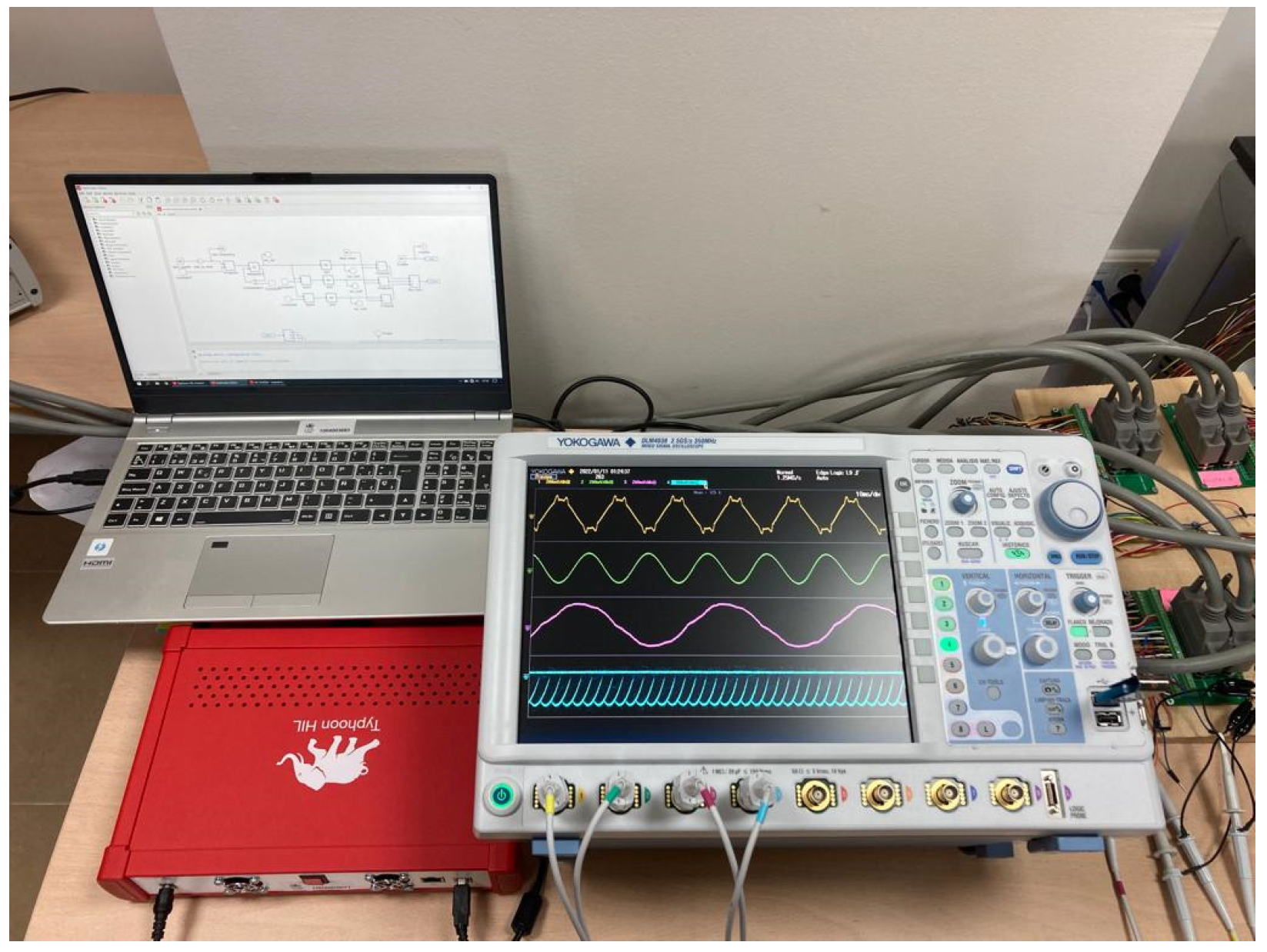
3.3. Experimental Setup
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- International Maritime Organization. Fourth IMO Greenhouse Gas Study: Executive Summary; International Maritime Organization: London, UK, 2020. [Google Scholar]
- Oceana Europe Shipping Pollution. Available online: https://europe.oceana.org/en/shipping-pollution-1 (accessed on 22 December 2021).
- Psaraftis, H.N.; Kontovas, C.A. Decarbonization of Maritime Transport: Is There Light at the End of the Tunnel? Sustainability 2021, 13, 237. [Google Scholar] [CrossRef]
- International Maritime Organization. Initial IMO Strategy on Reduction of GHG Emission from Ships—Resolution MEPC.304(72); International Maritime Organization: London, UK, 2018. [Google Scholar]
- Balcombe, P.; Brierley, J.; Lewis, C.; Skatvedt, L.; Speirs, J.; Hawkes, A.; Staffell, I. How to decarbonise international shipping: Options for fuels, technologies and policies. Energy Convers. Manag. 2019, 182, 72–88. [Google Scholar] [CrossRef]
- Nicolaides, D.; Cebon, D.; Miles, J. Prospects for Electrification of Road Freight. IEEE Syst. J. 2018, 12, 1838–1849. [Google Scholar] [CrossRef] [Green Version]
- Zhuang, W.; Li, S.E.; Zhang, X.; Kum, D.; Song, Z.; Yin, G.; Ju, F. A survey of powertrain configuration studies on hybrid electric vehicles. Appl. Energy 2020, 262, 114553. [Google Scholar] [CrossRef]
- Xing, H.; Spence, S.; Chen, H. A comprehensive review on countermeasures for CO2 emissions from ships. Renew. Sustain. Energy Rev. 2020, 134, 110222. [Google Scholar] [CrossRef]
- Łebkowski, A. Reduction of Fuel Consumption and Pollution Emissions in Inland Water Transport by Application of Hybrid Powertrain. Energies 2018, 11, 1981. [Google Scholar] [CrossRef] [Green Version]
- Al-Falahi, M.D.A.; Nimma, K.S.; Jayasinghe, S.D.G.; Enshaei, H.; Guerrero, J.M. Power management optimization of hybrid power systems in electric ferries. Energy Convers. Manag. 2018, 172, 50–66. [Google Scholar] [CrossRef] [Green Version]
- Sulligoi, G.; Member, S.; Vicenzutti, A.; Member, S.; Menis, R. All-Electric Ship Design: From Electrical Propulsion to Integrated Electrical and Electronic Power Systems. IEEE Trans. Transp. Electrif. 2016, 2, 507–521. [Google Scholar] [CrossRef]
- Lashway, C.R.; Elsayed, A.T.; Mohammed, O.A. Hybrid energy storage management in ship power systems with multiple pulsed loads. Electr. Power Syst. Res. 2016, 141, 50–62. [Google Scholar] [CrossRef] [Green Version]
- Hou, J.; Sun, J.; Hofmann, H.F. Mitigating Power Fluctuations in Electric Ship Propulsion With Hybrid Energy Storage System: Design and Analysis. IEEE J. Ocean. Eng. 2018, 43, 93–107. [Google Scholar] [CrossRef]
- Hou, J.; Song, Z.; Hofmann, H.; Sun, J. Adaptive model predictive control for hybrid energy storage energy management in all-electric ship microgrids. Energy Convers. Manag. 2019, 198, 111929. [Google Scholar] [CrossRef]
- Dedes, E.K.; Hudson, D.A.; Turnock, S.R. Investigation of Diesel Hybrid systems for fuel oil reduction in slow speed ocean going ships. Energy 2016, 114, 444–456. [Google Scholar] [CrossRef] [Green Version]
- Kanellos, F.D.; Anvari-Moghaddam, A.; Guerrero, J.M. A cost-effective and emission-aware power management system for ships with integrated full electric propulsion. Electr. Power Syst. Res. 2017, 150, 63–75. [Google Scholar] [CrossRef] [Green Version]
- Banaei, M.R.; Alizadeh, R. Simulation-Based Modeling and Power Management of All-Electric Ships Based on Renewable Energy Generation Using Model Predictive Control Strategy. IEEE Intell. Transp. Syst. Mag. 2016, 8, 90–103. [Google Scholar] [CrossRef]
- Trovão, J.P.; Machado, F.; Pereirinha, P.G. Hybrid electric excursion ships power supply system based on a multiple energy storage system. IET Electr. Syst. Transp. 2016, 6, 190–201. [Google Scholar] [CrossRef]
- Kalikatzarakis, M.; Geertsma, R.D.; Boonen, E.J.; Visser, K.; Negenborn, R.R. Ship energy management for hybrid propulsion and power supply with shore charging. Control Eng. Pract. 2018, 76, 133–154. [Google Scholar] [CrossRef]
- Khan, M.M.S.; Faruque, M.O.; Newaz, A. Fuzzy Logic Based Energy Storage Management System for MVDC Power System of All Electric Ship. IEEE Trans. Energy Convers. 2017, 32, 798–809. [Google Scholar] [CrossRef] [Green Version]
- Nounou, K.; Charpentier, J.F.; Marouani, K.; Benbouzid, M.; Kheloui, A. Emulation of an Electric Naval Propulsion System Based on a Multiphase Machine Under Healthy and Faulty Operating Conditions. IEEE Trans. Veh. Technol. 2018, 67, 6895–6905. [Google Scholar] [CrossRef]
- Khooban, M.H.; Gheisarnejad, M.; Vafamand, N.; Jafari, M.; Mobayen, S.; Dragicevic, T.; Boudjadar, J. Robust frequency regulation in mobile microgrids: HIL implementation. IEEE Syst. J. 2019, 13, 4281–4291. [Google Scholar] [CrossRef]
- Jianyun, Z.; Li, C.; Lijuan, X.; Bin, W. Bi-objective optimal design of plug-in hybrid electric propulsion system for ships. Energy 2019, 177, 247–261. [Google Scholar] [CrossRef]
- Banaei, M.; Rafiei, M.; Boudjadar, J.; Khooban, M. A Comparative Analysis of Optimal Operation Scenarios in Hybrid Emission-Free Ferry Ships. IEEE Trans. Transp. Electrif. 2020, 6, 318–333. [Google Scholar] [CrossRef]
- Hasanvand, S.; Rafiei, M.; Gheisarnejad, M.; Khooban, M. Reliable Power Scheduling of an Emission-Free Ship: Multiobjective Deep Reinforcement Learning. IEEE Trans. Transp. Electrif. 2020, 6, 832–843. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, H.; Zhang, Q.; Wen, Y.; Hu, W.; Zhang, H. Power distribution strategy based on state of charge balance for hybrid energy storage systems in all-electric ships. J. Power Electron. 2021, 21, 1213–1224. [Google Scholar] [CrossRef]
- Steurer, M.M.; Schoder, K.; Faruque, O.; Soto, D.; Bosworth, M.; Sloderbeck, M.; Bogdan, F.; Hauer, J.; Winkelnkemper, M.; Schwager, L.; et al. Multifunctional Megawatt-Scale Medium Voltage DC Test Bed Based on Modular Multilevel Converter Technology. IEEE Trans. Transp. Electrif. 2016, 2, 597–606. [Google Scholar] [CrossRef]
- Typhoon HIL Typhoon HIL Documentation. Available online: https://www.typhoon-hil.com/documentation/ (accessed on 23 December 2021).
- IEEE Guide for Synchronous Generator Modeling Practices and Parameter Verification with Applications in Power System Stability Analyses. In IEEE Std 1110-2019 (Revision IEEE Std 1110-2002); The Institute of Electrical and Electronics Engineers: New York, NY, USA, 2020; pp. 1–92.
- Beres, R.N.; Wang, X.; Liserre, M.; Blaabjerg, F.; Bak, C.L. A Review of Passive Power Filters for Three-Phase Grid-Connected Voltage-Source Converters. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 54–69. [Google Scholar] [CrossRef] [Green Version]
- Krause, P.C.; Wasynczuk, O.; Sudhoff, S.D. Analysis of Electric Machinery and Drive Systems; Wiley-IEEE Press: Piscataway, NJ, USA, 2002; ISBN 9780471143260. [Google Scholar]
- Torreglosa, J.P.; Garcia-triviño, P.; Vera, D. Analyzing the Improvements of Energy Management Systems for Hybrid Electric Vehicles Using a Systematic Literature Review: How Far Are These Controls from Rule-Based Controls Used in Commercial Vehicles? Appl. Sci. 2020, 10, 8744. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (Unit) | Value |
|---|---|
| Nominal power (MVA) | 3 |
| Pole pairs | 2 |
| Nominal rms voltage (V) | 800 |
| Nominal frequency (Hz) | 60 |
| Stator inductance (μH) | 50 |
| Stator resistance (Ω) | 0.01 |
| System inertia (kg∙m2) | 10,000 |
| Speed control PI, Kp | 20 |
| Speed control PI, Ki | 5 |
| Parameter (Unit) | Value |
|---|---|
| Nominal voltage (V) | 2500 |
| Capacity (Ah) | 300 |
| Full charge voltage (%) | 108 |
| Nominal discharge current (%) | 5 |
| Internal resistance (Ω) | 0.208 |
| State of discharge at nominal voltage (%) | 50 |
| State of discharge in exponential zone (%) | 0.9 |
| Voltage in exponential zone (%) | 102.5 |
| Parameter (Unit) | Value |
|---|---|
| Ripple inductance (mH) | 3 |
| Resistance of the ripple inductance (Ω) | 0.1 |
| Capacitance (μF) | 20 |
| Series resistance, “damper” (Ω) | 1.5 |
| Line inductance (mH) | 0.1 |
| Resistance of the line inductance (Ω) | 0.1 |
| Parameter (Unit) | Value |
|---|---|
| Phase-Locked Loop | |
| dq low-pass filter cut-off frequency (rad/s) | 62.83 |
| Proportional gain (pu) | 100 |
| Integrator gain (pu) | 3200 |
| Derivative gain (pu) | 1 |
| Derivative low-pass cut-off (rad/s) | 714.29 |
| PID output limits (rad/s) | [−0.0001 0.0001] |
| Low-pass filter cut-off frequency (rad/s) | [−0.0001 0.0001] |
| Frequency of low-pass filter damping ratio (pu) | [−0.0001 0.0001] |
| Frequency limits | [−12 12] |
| PI controller for id | |
| Proportional gain (pu) | 0.0015 |
| Integrator gain (pu) | 1 |
| PI controller for iq | |
| Proportional gain (pu) | 0.0015 |
| Integrator gain (pu) | 1 |
| Parameter (Unit) | Value |
|---|---|
| Electrical subsystem | |
| Stator resistance (Ω/phase) | 0.0074 |
| Rotor resistance referred to stator (Ω/phase) | 0.0056 |
| Stator leakage inductance (mH) | 0.25 |
| Rotor leakage inductance referred to stator (mH) | 0.2 |
| Mutual inductance (H) | 0.005 |
| Mechanical subsystem | |
| Number of pole pairs | 2 |
| Combined rotor and load moment of inertia, J (kg∙m2) | 155 |
| Friction coefficient (Nms) | 0.05 |
| Parameter (Unit) | Value |
|---|---|
| SOCmin (%) | 50 |
| SOCmed (%) | 70 |
| SOCmax (%) | 90 |
| Peng,max (MW) | 0.2 |
| vlimit (knots) | 6 |
| f1 (pu) | 0.25 |
| f2 (pu) | 0.3 |
| Pchg (MW) | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torreglosa, J.P.; González-Rivera, E.; García-Triviño, P.; Vera, D. Performance Analysis of a Hybrid Electric Ship by Real-Time Verification. Energies 2022, 15, 2116. https://doi.org/10.3390/en15062116
Torreglosa JP, González-Rivera E, García-Triviño P, Vera D. Performance Analysis of a Hybrid Electric Ship by Real-Time Verification. Energies. 2022; 15(6):2116. https://doi.org/10.3390/en15062116
Chicago/Turabian StyleTorreglosa, Juan P., Enrique González-Rivera, Pablo García-Triviño, and David Vera. 2022. "Performance Analysis of a Hybrid Electric Ship by Real-Time Verification" Energies 15, no. 6: 2116. https://doi.org/10.3390/en15062116
APA StyleTorreglosa, J. P., González-Rivera, E., García-Triviño, P., & Vera, D. (2022). Performance Analysis of a Hybrid Electric Ship by Real-Time Verification. Energies, 15(6), 2116. https://doi.org/10.3390/en15062116