
Parameter Sensitivity Analysis and Robust Design Approach for Flux-Switching Permanent Magnet Machines



Abstract
:1. Introduction
2. Local Maximum Air-Gap Flux Density (Bgmax) and Magnetic Equivalent Circuit
3. Investigation on the Parameter Sensitivities
3.1. PM Flux Linked by Armature Windings
3.2. d-Axis and q-Axis Inductances
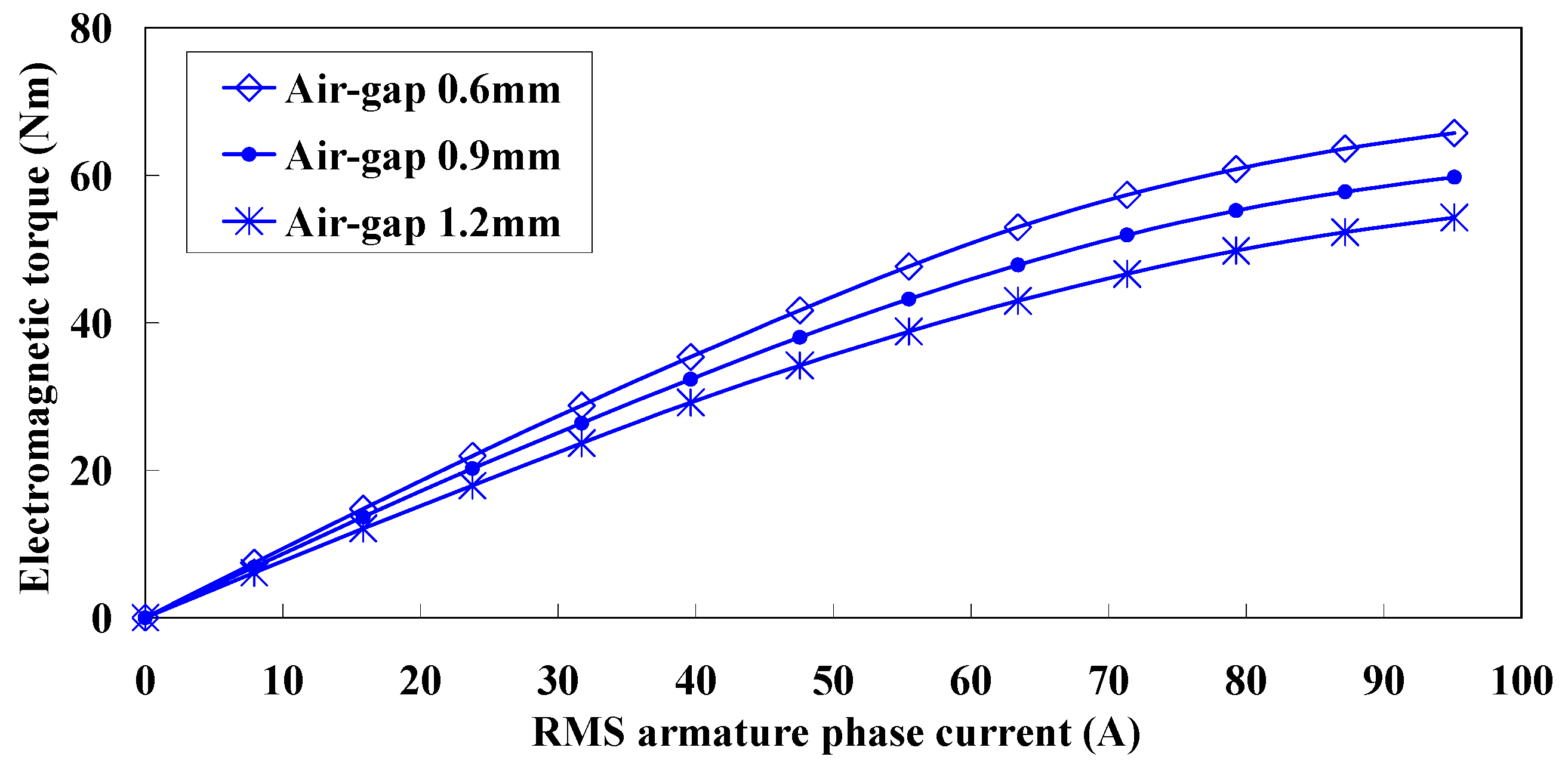
3.3. Electromagnetic Torque
3.4. Power Factor Angle
3.5. Working Point of the PMs
4. Considerations Regarding Manufacturing Tolerances and Robust Approach
4.1. Air-Gap Length and Key Performances
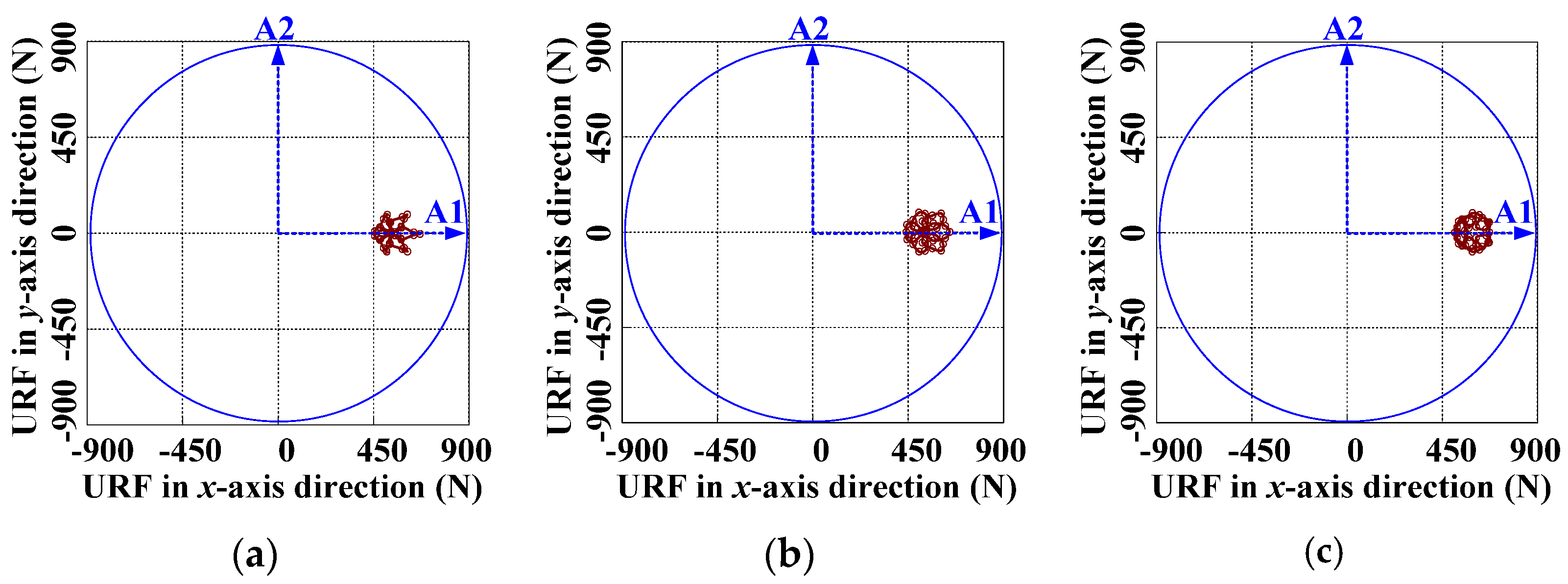
4.2. Unbalanced Radial Forces on Rotor
4.3. Robust Design Approach
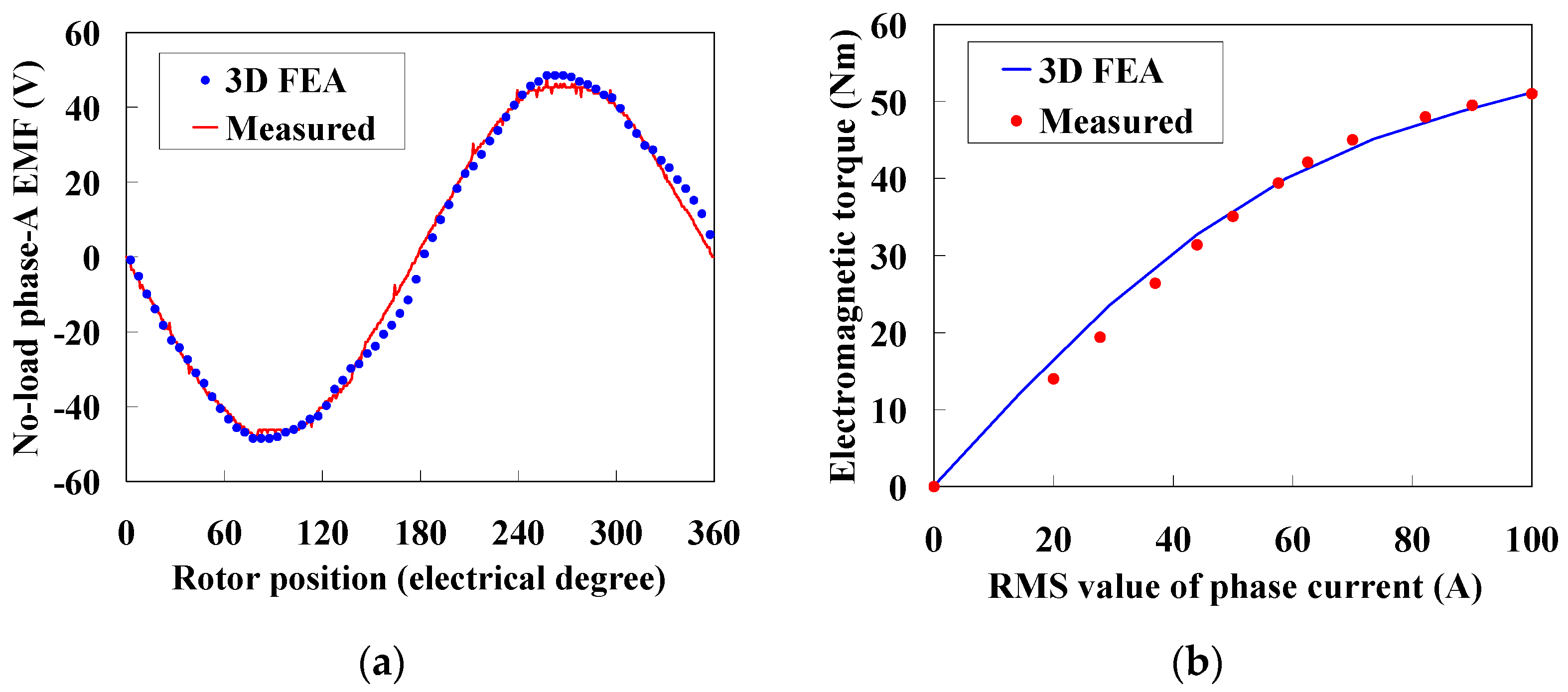
5. Experimental Validations and the Robust Design Approach
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kurtović, H.; Hahn, I. Calculation of active material’s torque contributions for a flux switching machine. IEEE Trans. Magn. 2020, 56, 7508504. [Google Scholar] [CrossRef]
- Chen, Z.X.; Cui, Y.J. Numerical simulation and experimental validation of a flux switching permanent magnet memory machine. IEEE Access 2020, 8, 194904–194911. [Google Scholar] [CrossRef]
- Hua, W.; Cheng, M.; Zhu, Z.Q. Analysis and optimization of back-EMF waveform of a flux-switching permanent magnet motor. IEEE Trans. Energy Convers. 2008, 23, 727–733. [Google Scholar] [CrossRef]
- Cheng, M.; Hua, W.; Zhang, J.Z. Overview of stator-permanent magnet brushless machines. IEEE Trans. Ind. Electron. 2011, 58, 5087–5101. [Google Scholar] [CrossRef]
- Chan, C.C. The state of the art of electric, hybrid, and fuel cell vehicles. Proc. IEEE 2007, 95, 704–718. [Google Scholar] [CrossRef]
- Zhang, G.; Hua, W.; Cheng, M. Design and comparison of two six-phase hybrid-excited flux-switching machines for EV/HEV applications. IEEE Trans. Ind. Electron. 2016, 63, 481–493. [Google Scholar] [CrossRef]
- Wang, P.X.; Hua, W.; Zhang, G.; Wang, B.; Cheng, M. Torque ripple suppression of flux-switching permanent magnet machine based on general air-gap field modulation theory. IEEE Trans. Ind. Electron. 2021. Early access. [Google Scholar] [CrossRef]
- Zeng, Z.Q.; Shen, Y.M.; Lu, Q.F.; Gerada, D.; Wu, B.; Huang, X.Y.; Gerada, C. Flux-density harmonics analysis of switched-flux permanent magnet machines. IEEE Trans. Magn. 2019, 55, 8103607. [Google Scholar] [CrossRef]
- Wang, D.H.; Wang, X.H.; Jung, S.Y. Reduction on cogging torque in flux-switching permanent magnet machine by teeth notching schemes. IEEE Trans. Magn. 2012, 48, 4228–4231. [Google Scholar] [CrossRef]
- Wang, P.X.; Hua, W.; Zhang, G.; Wang, B.; Cheng, M. Principle of flux-switching permanent magnet machine by magnetic field modulation theory part I: Back-electromotive-force generation. IEEE Trans. Ind. Electron. 2022, 69, 2370–2379. [Google Scholar] [CrossRef]
- Wang, P.X.; Hua, W.; Zhang, G.; Wang, B.; Cheng, M. Principle of flux-switching pm machine by magnetic field modulation theory part II: Electromagnetic torque generation. IEEE Trans. Ind. Electron. 2022, 69, 2437–2446. [Google Scholar] [CrossRef]
- Wang, P.X.; Hua, W.; Zhang, G.; Wang, B.; Cheng, M. Inductance characteristics of flux-switching permanent magnet machine based on general air-gap filed modulation theory. IEEE Trans. Ind. Electron. 2021. Early access. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Pang, Y.; Howe, D. Analysis of electromagnetic performance of flux-switching permanent-magnet machines by nonlinear adaptive lumped parameter magnetic circuit model. IEEE Trans. Magn. 2005, 41, 4277–4287. [Google Scholar] [CrossRef]
- Ilhan, E.; Gysen, B.L.J.; Paulides, J.J.H. Analytical hybrid model for flux switching permanent magnet machines. IEEE Trans. Magn. 2010, 46, 1762–1765. [Google Scholar] [CrossRef] [Green Version]
- Gysen, B.L.J.; Ilhan, E.; Meessen, K.J. Modeling of flux switching permanent magnet machines with Fourier analysis. IEEE Trans. Magn. 2010, 46, 1499–1502. [Google Scholar] [CrossRef] [Green Version]
- Zhu, S.; Cheng, M.; Hua, W.; Cai, X.H.; Tong, M.H. Finite element analysis of flux-switching pm machine considering oversaturation and irreversible demagnetization. IEEE Trans. Magn. 2015, 51, 7403404. [Google Scholar] [CrossRef]
- Sulaiman, E.; Kosaka, T. Parameter sensitivity study for optimization of field-excitation flux switching synchronous machine for hybrid electric vehicles. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012. [Google Scholar] [CrossRef]
- Xiang, Z.X.; Zhu, X.Y.; Quan, L.; Fan, D.Y. Optimization design and analysis of a hybrid permanent magnet flux-switching motor with compound rotor configuration. CES Transact. Electr. Mach. Syst. 2018, 2, 200–206. [Google Scholar] [CrossRef]
- Chen, Y.Y.; Zhuang, J.H.; Ding, Y.; Li, X.J. Optimal design and performance analysis of double stator multi-excitation flux-switching machine. IEEE Trans. Appl. Supercond. 2019, 2, 0601205. [Google Scholar] [CrossRef]
- Yu, J.C.; Liu, C.H. Multi-objective optimization of a double-stator hybrid-excited flux-switching permanent-magnet machine. IEEE Trans. Energy Convers. 2020, 35, 312–323. [Google Scholar] [CrossRef]
- Ullah, W.; Khan, F.; Umair, M. Multi-objective optimization of high torque density segmented PM consequent pole flux switching machine with flux bridge. CES Transact. Electr.Mach. Syst. 2021, 5, 30–40. [Google Scholar] [CrossRef]
- Sun, H.; Yang, J. Optimal decisions for competitive manufacturers under carbon tax and cap-and-trade policies. Comput. Ind. Eng. 2021, 156, 107244. [Google Scholar] [CrossRef]
- Foumani, M.; Jenab, K. Cycle time analysis in reentrant robotic cells with swap ability. Int. J. Product. Res. 2012, 50, 6372–6387. [Google Scholar] [CrossRef]
- Sulaiman, E.; Zakaria, S.N.U.; Kosaka, T. Parameter sensitivity study for optimization of single phase E-Core hybrid excitation flux switching machine. In Proceedings of the 2015 IEEE International Conference on Mechatronics (ICM), Nagoya, Japan, 6–8 March 2015. [Google Scholar] [CrossRef]
- Zhao, W.J.; Qiu, X.; Bu, F.F.; Yang, J.F.; Fan, W.X. Study on influence of structure parameters on electromagnetic characteristics for 12/10 flux-switching permanent magnet motor. In Proceedings of the 2019 IEEE 13th International Conference on Power Electronics and Drive Systems (PEDS), Toulouse, France, 9–12 July 2019. [Google Scholar] [CrossRef]
- Lei, G.; Wang, T.S.; Zhu, J.G. System-level design optimization method for electrical drive systems−robust approach. IEEE Trans. Ind. Electron. 2015, 62, 4702–4713. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Quantity |
|---|---|---|
| nN | Rated rotor speed | 1000 r/min |
| Br | PM remanence at 25 °C | 1.2 T |
| g | Air-gap length | 0.9 mm |
| Ps | Stator slot number | 12 |
| Pr | Rotor pole number | 10 |
| Pn | Rated power | 4.8 kW |
| Ia | Rated current | 60 Arms |
| Tn | Rated torque | 46 Nm |
| Ncoil | Turns per coil | 18 |
| Dso | Stator outer diameter | 240 mm |
| Dsi | Stator inner diameter | 14 mm |
| ksio | Stator split ratio | 0.6 |
| la | Active stack length | 40 mm |
| βpm | Magnet width arc | 6.0° |
| βst | Stator tooth arc | 8.0° |
| βslot | Stator slot arc | 8.0° |
| hsy | Stator yoke width | 9.4 mm |
| βrt | Rotor tooth arc | 10.5° |
| βry | Rotor tooth yoke arc | 21.0° |
| hpr | Rotor yoke width | 17.8 mm |
| Electromagnetic Performances | Air-Gap Length | ||
|---|---|---|---|
| 0.6 mm | 0.9 mm | 1.2 mm | |
| RMS no-load phase-A EMF | 38.0 V | 35.3 V | 30.8 V |
| Peak-to-peak cogging torque | 4.8 Nm | 3.3 Nm | 3.2 Nm |
| RMS loaded phase-A EMF | 56.8 V | 55.7 V | 54.9 V |
| Average torque, rated | 66.3 Nm | 60.5 Nm | 55.1 Nm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Tong, Q.; Qiu, A.; Xu, X.; Hua, W.; Chen, Z. Parameter Sensitivity Analysis and Robust Design Approach for Flux-Switching Permanent Magnet Machines. Energies 2022, 15, 2194. https://doi.org/10.3390/en15062194
Zhang G, Tong Q, Qiu A, Xu X, Hua W, Chen Z. Parameter Sensitivity Analysis and Robust Design Approach for Flux-Switching Permanent Magnet Machines. Energies. 2022; 15(6):2194. https://doi.org/10.3390/en15062194
Chicago/Turabian StyleZhang, Gan, Qing Tong, Anjian Qiu, Xiaohan Xu, Wei Hua, and Zhihong Chen. 2022. "Parameter Sensitivity Analysis and Robust Design Approach for Flux-Switching Permanent Magnet Machines" Energies 15, no. 6: 2194. https://doi.org/10.3390/en15062194
APA StyleZhang, G., Tong, Q., Qiu, A., Xu, X., Hua, W., & Chen, Z. (2022). Parameter Sensitivity Analysis and Robust Design Approach for Flux-Switching Permanent Magnet Machines. Energies, 15(6), 2194. https://doi.org/10.3390/en15062194