
Derivative Probes Signal Integration Techniques for High Energy Pulses Measurements



Abstract
:
1. Introduction
- In the introduction, we present the most common applications required for signal integration.
- The second chapter is devoted to the presentation of theoretical background for field probes: electric field (D-dot type) and magnetic field (B-dot type) and the possible signal integration methods for these probes. The problem of signal acquisition trigger configuration is presented.
- The third chapter presents two measurement setups for different signal generators. We explain our method of signal integration and discuss the defects of using an incorrect numerical integration algorithm approach.
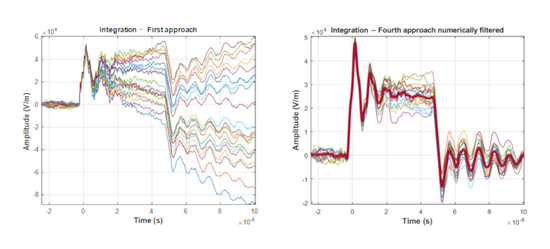
- The fourth chapter contains discussion and comparison of different approaches to the integration aspect in the measurement of electromagnetic field.
- The fifth chapter contains summary of the achieved results where the proposed integration approach gives the effective cumulative integration drift attenuation. The obtained outcomes are characterized by the drift attenuation level of a range of 400.
2. Fundamentals of Field Probes and Integration Methods
2.1. Field Probes Functional Principle
2.2. Signal Integration Methods
- hardware (analogue) circuits;
- numerical methods.
2.3. Practical Problems of the Signal Acquisition
3. Experiments Explanation and Results Discussion
3.1. Measurement Setup for Nanosecond Pulse
3.2. Measurement Setup and Procedure for High Power Microwave—HPM Generator
4. Discussion and Comparison of Results
5. Conclusions and Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mariscotti, A. A Magnetic Field Probe with MHz Bandwidth and 7-Decade Dynamic Range. IEEE Trans. Instrum. Meas. 2009, 58, 2643–2652. [Google Scholar] [CrossRef]
- Filik, K.; Hajder, S.; Masłowski, G. Multi-Stroke Lightning Interaction with Wiring Harness: Experimental Tests and Modelling. Energies 2021, 14, 2106. [Google Scholar] [CrossRef]
- Novac, B.M.; Smith, I.R.; Rankin, D.F.; Hubbard, M. A Fast and Compact theta-Pinch Electromagnetic Flux-Compression Generator. J. Phys. D Appl. Phys. 2004, 37, 3041–3055. [Google Scholar] [CrossRef]
- Lv, Q.-A.; Lei, B.; Gao, M.; Li, Z.-Y.; Chi, X.-P.; Li, H. Magnetic Flux Compression Generator as Future Military Pulsed Power Supply. IEEE Trans. Magn. 2009, 45, 545–549. [Google Scholar] [CrossRef]
- Zhang, H.; Shu, T.; Liu, S.; Zhang, Z.; Song, L.; Zhang, H. A Compact Modular 5 GW Pulse PFN-Marx Generator for Driving HPM Source. Electronics 2021, 10, 545. [Google Scholar] [CrossRef]
- Rąbkowski, J.; Łasica, A.; Zdanowski, M.; Wrona, G.; Starzyński, J. Portable DC Supply Based on SiC Power Devices for High-Voltage Marx Generator. Electronics 2021, 10, 313. [Google Scholar] [CrossRef]
- Mucsi, V.; Ayub, A.S.; Muhammad-Sukki, F.; Zulkipli, M.; Muhtazaruddin, M.N.; Mohd Saudi, A.S.; Ardila-Rey, J.A. Lightning Protection Methods for Wind Turbine Blades: An Alternative Approach. Appl. Sci. 2020, 10, 2130. [Google Scholar] [CrossRef] [Green Version]
- Albano, M.; Haddad, A.M.; Griffiths, H.; Coventry, P. Environmentally Friendly Compact Air-Insulated High-Voltage Substations. Energies 2018, 11, 2492. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Zhang, Q.; Zhang, L.; Liu, F.; Tan, X. Design of Rogowski Coil with external integrator for measurement of lightning current up to 400 kA. Przegląd Elektrotechniczny 2011, 87, 188–192. [Google Scholar]
- Wang, H.; Fu, Z.; Wang, Y.; Tai, H.; Qin, S.; Liao, X. A Time-Domain Feedback Calibration Method for Air-Coil Magnetic Sensor. Measurement 2019, 135, 61–70. [Google Scholar] [CrossRef]
- Norhisam, M.; Norrimah, A.; Wagiran, R.; Sidek, R.M.; Mariun, N.; Wakiwaka, H. Consideration of Theoretical Equation for Output Voltage of Linear Displacement Sensor Using Meander Coil and Pattern Guide. Sens. Actuators A Phys. 2008, 147, 470–473. [Google Scholar] [CrossRef]
- Marconato, N.; Cavazzana, R.; Bettini, P.; Rigoni, A. Accurate Magnetic Sensor System Integrated Design. Sensors 2020, 20, 2929. [Google Scholar] [CrossRef] [PubMed]
- Šaliga, J.; Kováč, O.; Andráš, I. Analog-to-Information Conversion with Random Interval Integration. Sensors 2021, 21, 3543. [Google Scholar] [CrossRef] [PubMed]
- Murray, T.S.; Pouliquen, P.O.; Andreou, A.G. Design of a Parallel Sampling Encoder for Analog to Information (A2I) Converters: Theory, Architecture and CMOS Implementation. Electronics 2013, 2, 57–79. [Google Scholar] [CrossRef] [Green Version]
- Silva, V.M.L.; Souza, C.P.; Freire, R.C.S.; Arruda, B.W.S.; Gurjão, E.C.; Reis, V.L. Novel IEEE-STD-1241-Based Test Methods for Analog-to-Information Converter. IEEE Trans. Instrum. Meas. 2020, 69, 1609–1619. [Google Scholar] [CrossRef]
- Możdżyński, K. Simple Digital Integration Algorithm with Saturation and Drift Elimination Based Second-Order Generalized Integrator. In Proceedings of the 2015 9th International Conference on Compatibility and Power Electronics (CPE), Costa da Caparica, Portugal, 24–26 June 2015; pp. 312–316. [Google Scholar]
- Integrator 1.2 µs Type ITR1-2U User’s Manual. Montena, Rossens Switzerland 2015. Available online: www.montena.com (accessed on 15 January 2022).
- Chapra, S.; Canale, R. Numerical Methods for Engineers, 8th ed.; MacGraw-Hill Education: New York, NY, USA, 2021. [Google Scholar]
- Wei, B.; Guo, F.; Wang, Z.; Qing, Y.; Yuan, J.; Liang, J.; Xie, W. Frequency Response Properties of the B-Dot Sensors Employed on a High Current Pulsed Power Facility. IEEE Sens. J. 2021, 21, 17732–17737. [Google Scholar] [CrossRef]
- Yao, C.; Xiao, Q.; Mi, Y.; Yuan, T.; Li, C.; Sima, W. Contactless Measurement of Lightning Current Using Self-Integrating B-Dot Probe. IEEE Trans. Dielectr. Electr. Insul. 2011, 18, 1323–1327. [Google Scholar] [CrossRef]
- Agry, A.A.; Schill, R.A. Calibration of Electromagnetic Dot Sensor—Part 1: B-Dot Mode. IEEE Sens. J. 2014, 14, 3101–3110. [Google Scholar] [CrossRef]
- Jakubowski, J.; Kuchta, M.; Kubacki, R. D-Dot Sensor Response Improvement in the Evaluation of High-Power Microwave Pulses. Electronics 2021, 10, 123. [Google Scholar] [CrossRef]
- Huiskamp, T.; Beckers, F.J.C.M.; van Heesch, E.J.M.; Pemen, A.J.M. B-Dot and D-Dot Sensors for (Sub)Nanosecond High-Voltage and High-Current Pulse Measurements. IEEE Sens. J. 2016, 16, 3792–3801. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Integration Type | Method | Common Signal Parameter: Signal Rise Time | Requirements, Measurement Conditions | REF |
|---|---|---|---|---|
| Hardware | Passive integrator 1 μs or 5 μs | Magnetically insulated transmission line (MITL). trise = 96 ns | Directly in the transmission line, galvanic connection | [19] |
| Hardware | Self-integration probe selected frequency band. | Lightning current trise = 8 μs | Known signal parameters, unchanged measurement setup configuration, galvanic connection | [20] |
| Numerical | Mean value removal | Calibration testing signal trise = 4.2 ns | unchanged measurement setup configuration, galvanic connection | [21] |
| Numerical | FIR filter | High-power microwave (HPM) pulses trise = 3 ns | Self-developed measurement instrument | [22] |
| Numerical | FFT and FIR filter | HV pulses measured in the close neighborhood of the cable trise ≤ 1 ns | Short connections, signal processing in Matlab | [23] |
| Numerical | Local Mean value (segmented signal) removal with an optional FFT and FIR filter | HV pulses, HPM pulses, trise ≤ 5 ns | Floating signals, spatial, outdoor measurement. Numeric operation computed directly on oscilloscope | Current work |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jóśko, A.; Dziadak, B.; Starzyński, J.; Sroka, J. Derivative Probes Signal Integration Techniques for High Energy Pulses Measurements. Energies 2022, 15, 2244. https://doi.org/10.3390/en15062244
Jóśko A, Dziadak B, Starzyński J, Sroka J. Derivative Probes Signal Integration Techniques for High Energy Pulses Measurements. Energies. 2022; 15(6):2244. https://doi.org/10.3390/en15062244
Chicago/Turabian StyleJóśko, Adam, Bogdan Dziadak, Jacek Starzyński, and Jan Sroka. 2022. "Derivative Probes Signal Integration Techniques for High Energy Pulses Measurements" Energies 15, no. 6: 2244. https://doi.org/10.3390/en15062244
APA StyleJóśko, A., Dziadak, B., Starzyński, J., & Sroka, J. (2022). Derivative Probes Signal Integration Techniques for High Energy Pulses Measurements. Energies, 15(6), 2244. https://doi.org/10.3390/en15062244