
Research on TVD Control of Cornering Energy Consumption for Distributed Drive Electric Vehicles Based on PMP



Abstract
:1. Introduction
- Aiming at the problem of a complex nonlinear vehicle dynamics model, this paper effectively solves the energy optimization problem with multiple control constraints and boundary conditions by constructing a reasonable energy management strategy.
- The BAS-PSO algorithm is adopted to reduce a large amount of optimization time required by a management strategy. Aiming at the optimization goal of energy consumption, good results have been achieved.
- The iteration of BAS-PSO is optimized, which reduces the need for a lot of experiments in this paper.
2. Dynamic Modeling
2.1. 7-DOF Vehicle Dynamics Model
2.2. The Turning Energy Consumption of the Vehicle
3. An Optimized Method Based on PMP
3.1. Energy Management Optimization Model
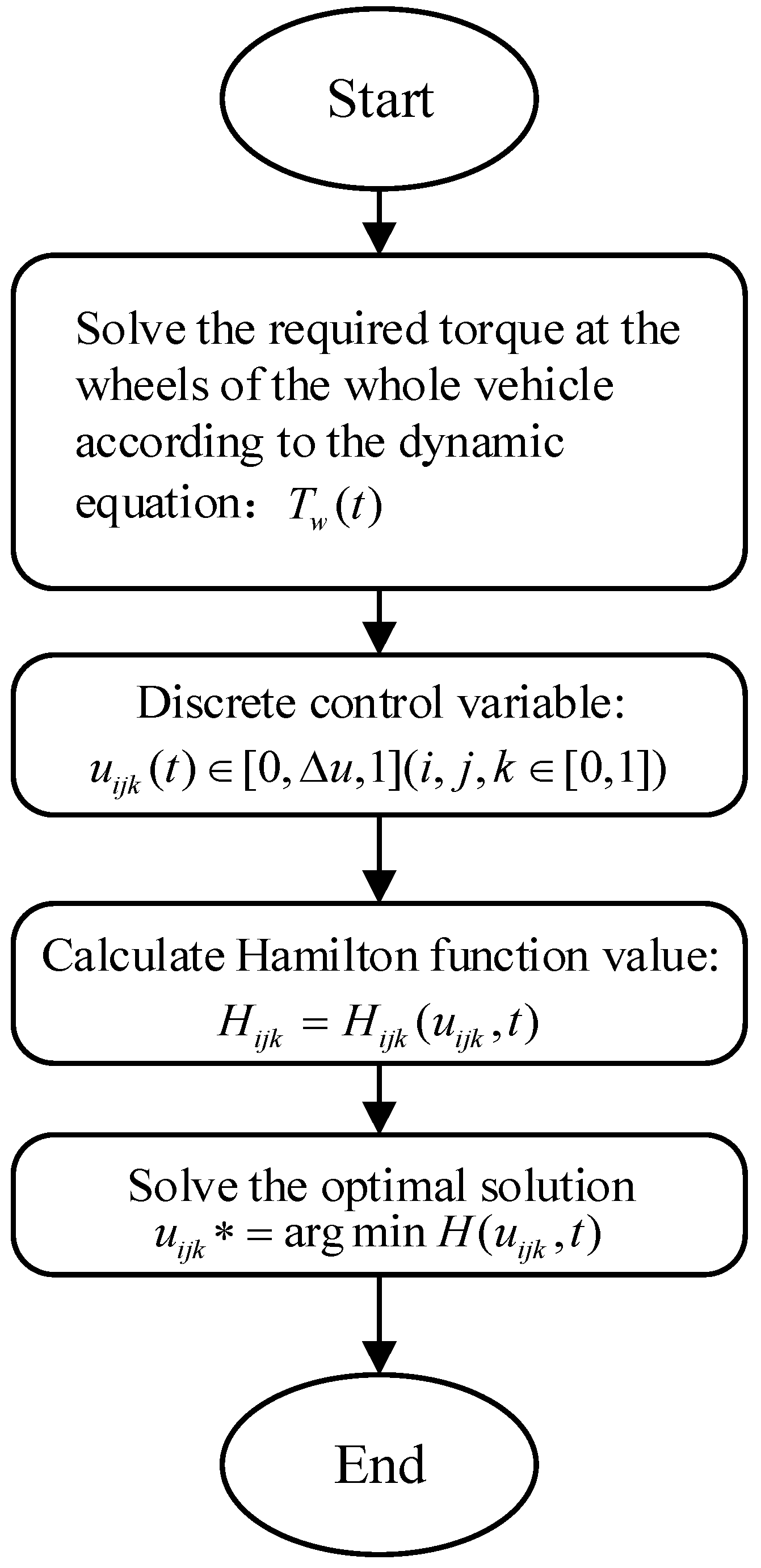
3.2. Solution Flow of PMP
- (1)
- The required torque at the wheels of the vehicle was calculated according to the equation of dynamics;
- (2)
- Step size is used to discretize the torque distribution coefficient within the value range;
- (3)
- For each discrete torque coefficient matrix , the value of Hamilton function corresponds to each candidate control variable, until the end of the cycle;
- (4)
- Obtain the optimal control variable.
4. BAS-PSO Optimization Algorithm
4.1. BAS-PSO
4.2. Iteration Stop Condition
- (1)
- if , ;
- (2)
- if , ;
- (3)
- if , .
5. Simulation Analysis
5.1. Simulation Analysis Based on BAS-PSO
5.2. Simulation Analysis Based on Dynamic Vehicle Model
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| TVD | Torque Vectoring Distribution |
| PMP | Pontryagin Minimum Principle |
| BAS-PSO | Beetle Antenna Search–Particle Swarm Optimization |
| 4WD | 4-Wheel-Drive |
| EV | Eclectic Vehicle |
| DP | Dynamic Programming |
| RLS | Recursive Least Square |
| YSC | Yaw Stability Control |
| EMB | Electromechanical Brake |
| GA | Genetic Algorithm |
| AEFA | Artificial Electric Field Algorithm |
| AOA | Arithmetic Optimization Algorithm |
| EO | Equilibrium Optimizer |
| GWO | Gray Wolf Optimizer |
| BA | Bat Algorithm |
| HHO | Harris Hawks Optimization |
| ACO | Ant Colony Optimization |
| IHBO | Improved Heap-Based Optimizer |
| Symbols | |
| Vehicle mass (kg) | |
| Moment of inertia of the vehicle rotating (kg·m2) | |
| Rolling resistance (N) | |
| Air resistance (N) | |
| Longitudinal velocity (km/h) | |
| Lateral velocity (km/h) | |
| Yaw velocity (rad/s) | |
| Wheelbase of the vehicle from the center of mass to the front axles (m) | |
| Wheelbase of the vehicle from the center of mass to the rear axles (m) | |
| Wheelbase of the front wheels (m) | |
| Wheelbase of the rear wheels (m) | |
| Left front wheel angle (deg) | |
| Right front wheel angle (deg) | |
| Slip angle of tire (deg) | |
| Actual left front wheel angle (deg) | |
| Actual right front wheel angle (deg) | |
| Driving force of tire (N) | |
| Side force of tire (N) | |
| Longitudinal force of tire (N) | |
| Tangential force of tire (N) | |
| Speed (km/h) | |
| Sideslip angle (deg) | |
| Rolling resistance coefficient | |
| Gravitational acceleration (m/s2) | |
| Air density (kg/m3) | |
| Windward area of the body (m2) | |
| Air resistance coefficient | |
| Driving force (N) | |
| Direct yaw moment (N·m) | |
| Longitudinal slip rate (%) | |
| Tire radius (m) | |
| Wheel speed (r/s) | |
| Wheel center speed (km/h) | |
| Longitudinal slip power loss (kW) | |
| Total power loss of the vehicle (kW) | |
| Braking torque suffered by each vehicle (N) |
References
- Ma, J.; Liu, X.D.; Chen, Y.S.; Wang, G.P.; Zhao, X.; He, Y.L.; Xu, S.W.; Zhang, K.; Zhang, Y.X. Development Status and Countermeasures of New Energy Automobile Industry and Technology in China. China J. Highw. Transp. 2018, 31, 1–19. [Google Scholar]
- Yu, Z.P.; Feng, Y.; Xiong, L. Review on Development of Dynamic Control for Distributed Drive Electric Vehicle. J. Mech. Eng. 2013, 49, 105–114. [Google Scholar] [CrossRef]
- Gruber, W.; Back, W.; Amrhein, W. Design and implementation of a wheel hub motor for an electric scooter. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar]
- Xu, X.; Chen, T.; Chen, L.; Cai, Y.F.; Wang, W.J. Torque Energy Saving Optimal Allocation for Distributed Drive Electric Vehicle. China J. Highw. Transp. 2018, 31, 183–190. [Google Scholar]
- He, J.; Crolla, D.A.; Levesley, M.C. Integrated active steering and variable torque distribution control for improving vehicle handling and stability. R. SAE Trans. 2004, 113, 38–47. [Google Scholar]
- Wang, J.N.; Yang, B.; Wang, Q.N. Overview of the development of vehicle torque directional distribution drive technology. J. Mech. Eng. 2020, 56, 109–121. [Google Scholar]
- Oh, K.; Joa, E.; Lee, J.; Yun, J.; Yi, K. Yaw Stability Control of 4WD Vehicles Based on Model Predictive Torque Vectoring with Physical Constraints. Int. J. Automot. Technol. 2019, 20, 923–932. [Google Scholar] [CrossRef]
- Park, J.-Y.; Heo, S.-J.; Kang, D.-O. Development of Torque Vectoring Control Algorithm for Front Wheel Driven Dual Motor System and Evaluation of Vehicle Dynamics Performance. Int. J. Automot. Technol. 2020, 21, 1283–1291. [Google Scholar] [CrossRef]
- Meng, Q.; Zhao, T.; Qian, C. Integrated Stability Control of AFS and DYC for Electric Vehicle Based on Non-smooth Control. Int. J. Syst. Sci. 2018, 49, 1518–1528. [Google Scholar] [CrossRef]
- Chae, M.; Hyun, Y.; Yi, K. Dynamic Handling Characteristics Control of an in-Wheel-Motor Driven Electric Vehicle Based on Multiple Sliding Mode Control Approach. J. IEEE Access 2019, 7, 132448–132458. [Google Scholar] [CrossRef]
- Zhang, S.W.; Luo, Y.G.; Wang, J.M. Predictive energy management strategy for fully electric vehicles based on preceding vehicle movement. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3019–3060. [Google Scholar] [CrossRef]
- Tang, Z.; Xu, X.; Jiang, X.W. Optimal torque distribution strategy for minimizing energy consumption of four-wheel independent driven electric ground vehicle. J. Appl. Sci. Eng. 2018, 21, 375–384. [Google Scholar]
- Sun, W.; Wang, J.N.; Wang, Q.N. Simulation investigation of tractive energy conservation for a cornering rear-wheel-independent-drive electric vehicle through torque vectoring. Sci. China 2018, 61, 257–272. [Google Scholar] [CrossRef]
- Wu, X.G.; Zheng, D.Y.; Wang, T.Z. Torque Optimal Allocation Strategy of All-Wheel Drive Electric Vehicle Based on Difference of Efficiency Characteristics between Axis Motors. Energies 2019, 12, 1122. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.N.; Yu, T.Y.; Sun, N.N.; Fu, T.J. Torque Vectoring Control of Rear-Wheel-Independent-Drive Vehicle after Cornering Efficiency Improvement. J. Hunan Univ. (Nat. Sci.) 2020, 47, 9–17. [Google Scholar]
- Salamone, S.; Lenzo, B.; Lutzemberger, G. On the Investigation of Energy Efficient Torque Distribution Strategies through a Comprehensive Powertrain Model. J. Sustain. 2021, 13, 4549. [Google Scholar] [CrossRef]
- Liu, J.X.; Zhuang, W.C.; Zhong, H. Integrated energy-oriented lateral stability control of a four-wheel-independent-drive electric vehicle. J. Sci. China Technol. Sci. 2019, 62, 2170–2183. [Google Scholar] [CrossRef]
- Zhang, X.; Gohlich, D. Integrated Traction Control Strategy for Distributed drive electric vehicles with Improvement of Economy and Longitudinal Driving Stability. Energies 2017, 10, 126. [Google Scholar] [CrossRef] [Green Version]
- Yang, K.; Xie, L.Q.; Wang, J. The yaw stability control of rear drive all-electric independent drive-brake electric vehicle. J. Xi’an Jiaotong Univ. 2019, 53, 44–51. [Google Scholar]
- Kharrich, M.; Abualigah, L.; Kamel, S.; Abd El-Sattar, H.; Tostado-Véliz, M. An Improved Arithmetic Optimization Algorithm for design of a microgrid with energy storage system: Case study of El Kharga Oasis, Egypt. J. Energy Storage 2022, 51, 104343. [Google Scholar] [CrossRef]
- Almadhor, A.; Rauf, H.T.; Khan, M.A.; Kadry, S.; Nam, Y. A hybrid algorithm (BAPSO) for capacity configuration optimization in a distributed solar PV based microgrid. Energy Rep. 2021, 7, 7906–7912. [Google Scholar] [CrossRef]
- Kharrich, M.; Kamel, S.; Hassan, M.H.; ElSayed, S.K.; Taha, I.B.M. An Improved Heap-Based Optimizer for Optimal Design of a Hybrid Microgrid Considering Reliability and Availability Constraints. Sustainability 2021, 13, 10419. [Google Scholar] [CrossRef]
- Genta, G. Motor Vehicle Dynamics: Modeling and Simulation; World Scientific: Singapore, 1997. [Google Scholar]
- Wang, J. Steering Stability Control of Four-Wheel Motor Driven Vehicle; Beijing Institute of Technology: Beijing, China, 2015. [Google Scholar]
- Kobayashi, T.; Katsuyama, E.; Sugiura, H.; Ono, E.; Yamamoto, M. Efficient direct yaw moment control: Tyre slip power loss minimization for four-independent wheel drive vehicle. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 2018, 56, 719–733. [Google Scholar] [CrossRef]
- Ando, K.; Sawase, K.; Takeo, J. Analysis of tight corner braking phenomenon in full-time 4WD vehicles. JSAE Rev. 2002, 23, 83–87. [Google Scholar] [CrossRef]
- Sun, W.; Wang, Q.N.; Wang, J.N. Yaw-moment control of motorized vehicle for energy conservation during cornering. Jilin Daxue Xuebao J. Jilin Univ. 2018, 48, 11–19. [Google Scholar]
- Meng, X.; Li, Q.; Chen, W.R.; Zhang, G.R. An Energy Management Method Based on Pontryagin Minimum Principle Satisfactory Optimization for Fuel Cell Hybrid Systems. Available online: https://www.researchgate.net/publication/333035433_An_Energy_Management_Method_Based_on_Pontryagin_Minimum_Principle_Satisfactory_Optimization_for_Fuel_Cell_Hybrid_Systems (accessed on 10 January 2022).
- Gao, B.; Yan, Y.; Chu, H.; Chen, H.; Xu, N. Torque Allocation Control of Four-wheel Drive EVs Considering Energy Efficiency Optimization. Sci. China Inf. Sci. 2022, 65, 122202. [Google Scholar] [CrossRef]
- Cai, Y.; Wang, Z.W.; Zeng, Y.P.; Liu, Y.G. Research on the plug-in 4WD hybrid vehicle’s control strategy based on pontryagin’s minimum principle. Available online: http://kns.cnki.net/kcms/detail/50.1044.N.20210507.1252.003.html (accessed on 10 January 2022).
- Sun, W.; Rong, J.C.; Wang, J.N.; Zhang, W.T.; Zhou, Z.D. Research on Optimal Torque Control of Turning Energy Consumption for EVs with Motorized Wheels. Energies 2021, 14, 6947. [Google Scholar] [CrossRef]
- Jiang, X.; Li, S. BAS: Beetle Antennae Search Algorithm for Optimization Problems. Int. J. Robot. Control. 2017, 1, 1. [Google Scholar] [CrossRef]
- Jiang, X.; Shuai, L. Beetle Antennae Search without Parameter Tuning (BAS-WPT) for Multi-objective Optimization. arXiv 2017, arXiv:1711.02395. [Google Scholar] [CrossRef]
- Wang, T.; Long, Y.; Qiang, L. Beetle Swarm Optimization Algorithm: Theory and Application. arXiv 2018, arXiv:1808.00206. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optimization Parameters | |||
|---|---|---|---|
| BAS-PSO | Value | GA-PSO | Value |
| Population size | 20 | Chromosome code length | 3 |
| Maximum number of iterations | 50 | Crossover probability | 0.7 |
| Initial step size | 0.8 | Mutation probability | 0.3 |
| Maximum speed of longicorn update | 0.3 | Optimal position step size of individual | 1.49445 |
| Minimum speed of longicorn update | −0.3 | Optimal position step size of group | 1.49445 |
| Learning factor | 2 | Generation amount | 50 |
| Inertia factor | 0.5 | Population size | 20 |
| Distance between two whiskers of longicorn beetle | 0.5 | Maximum speed of particle update | 1 |
| Maximum timing | 30 | Minimum speed of particle update | −1 |
| Test 1 | Test 2 | Test 3 | Test 4 | Test 5 | |
| Optimization | 20 | 24 | 28 | 32 | 36 |
| Without optimization | 50 | 50 | 50 | 50 | 50 |
| Test 6 | Test 7 | Test 8 | Test 9 | Test 10 | |
| Optimization | 50 | 27 | 41 | 30 | 34 |
| Without optimization | 50 | 50 | 50 | 50 | 50 |
| Front Wheel Angle (deg) | Vehicle Speed (km/h) | ||||
|---|---|---|---|---|---|
| 10 | 20 | … | 70 | 80 | |
| 1 | [0.8110, 0.4232, 0.2834] | [0.7159, 0.3791, 0.3932] | … | [0.6830, 0.3207, 0.3727] | [0.8913, 0.4125, 0.1459] |
| 3 | [0.8323, 0.4493, 0.4134] | [0.7738, 0.4625, 0.4980] | … | [0.9841, 0.2894, 0.3264] | [0.9981, 0.3559, 0.2976] |
| 5 | [0.8878, 0.4040, 0.3857] | [0.8119, 0.3804, 0.4871] | … | [1, 0.2552, -] | - |
| 7 | [0.9223, 0.4018, 0.3761] | [0.8518, 0.4024, 0.4598] | … | - | - |
| … | … | … | … | … | … |
| 27 | [1, 0.2989, -] | [1, 0.3214, -] | … | - | - |
| 29 | [1, 0.2891, -] | - | … | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, W.; Chen, Y.; Wang, J.; Wang, X.; Liu, L. Research on TVD Control of Cornering Energy Consumption for Distributed Drive Electric Vehicles Based on PMP. Energies 2022, 15, 2641. https://doi.org/10.3390/en15072641
Sun W, Chen Y, Wang J, Wang X, Liu L. Research on TVD Control of Cornering Energy Consumption for Distributed Drive Electric Vehicles Based on PMP. Energies. 2022; 15(7):2641. https://doi.org/10.3390/en15072641
Chicago/Turabian StyleSun, Wen, Yang Chen, Junnian Wang, Xiangyu Wang, and Lili Liu. 2022. "Research on TVD Control of Cornering Energy Consumption for Distributed Drive Electric Vehicles Based on PMP" Energies 15, no. 7: 2641. https://doi.org/10.3390/en15072641
APA StyleSun, W., Chen, Y., Wang, J., Wang, X., & Liu, L. (2022). Research on TVD Control of Cornering Energy Consumption for Distributed Drive Electric Vehicles Based on PMP. Energies, 15(7), 2641. https://doi.org/10.3390/en15072641