
Distributed Secondary Control in Microgrids Using Synchronous Condenser for Voltage and Frequency Support

 , , ,
, , ,  and
and
Abstract
:1. Introduction
- Using SCs for (i) participating in distributed secondary control for voltage support and (ii) enhancing ROCOF and system strength.
- Developing a distributed secondary control for MGs using various types of energy resources, which include SCs, battery energy storage systems (BESSs) and diesel generators. The dynamic behaviors of converter-based and rotating machine-based generators are different and they need a proper coordination to achieve global objectives for the system.
- Realizing the proposed control by the multi-agent system in a heterogeneous implementation. The validation of the proof of concept in a realistic environment is one step closer to field development.
2. Methodology
2.1. Primary Control
2.1.1. Synchronous Generators
2.1.2. Power Inverter Control of BESSs
2.1.3. Synchronous Condensers
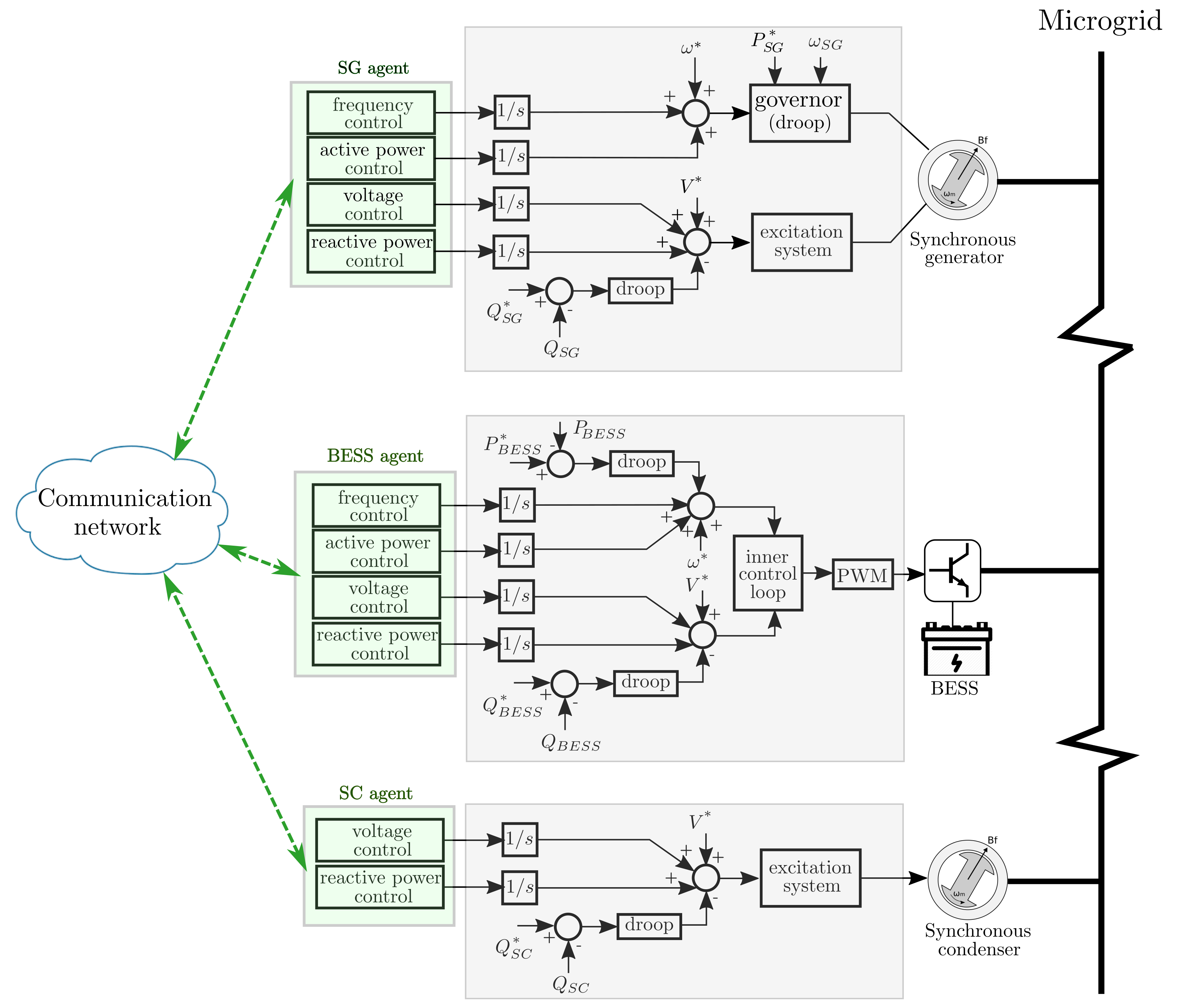
2.2. Secondary Control
2.3. Agent
| Algorithm 1: Agent i. |
|
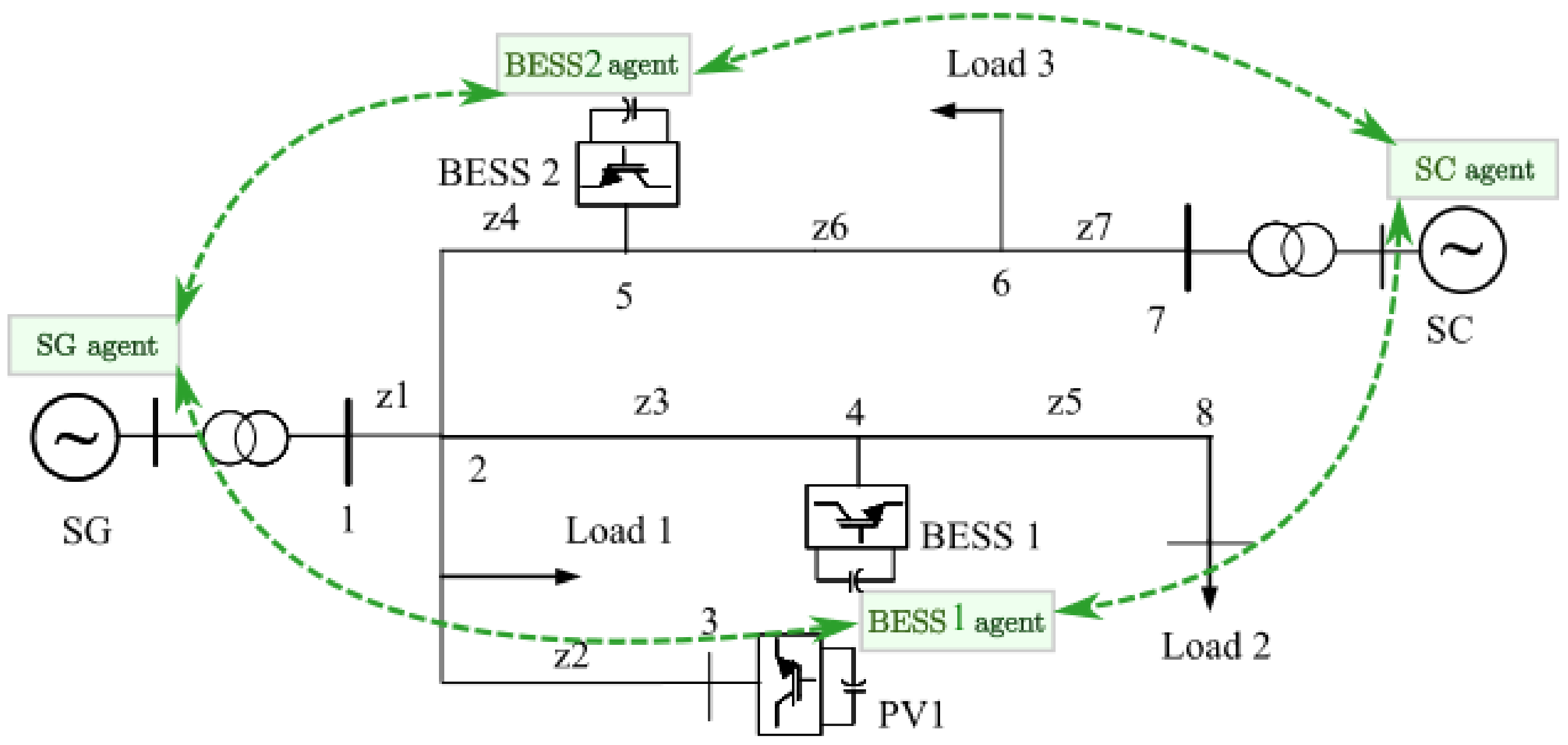
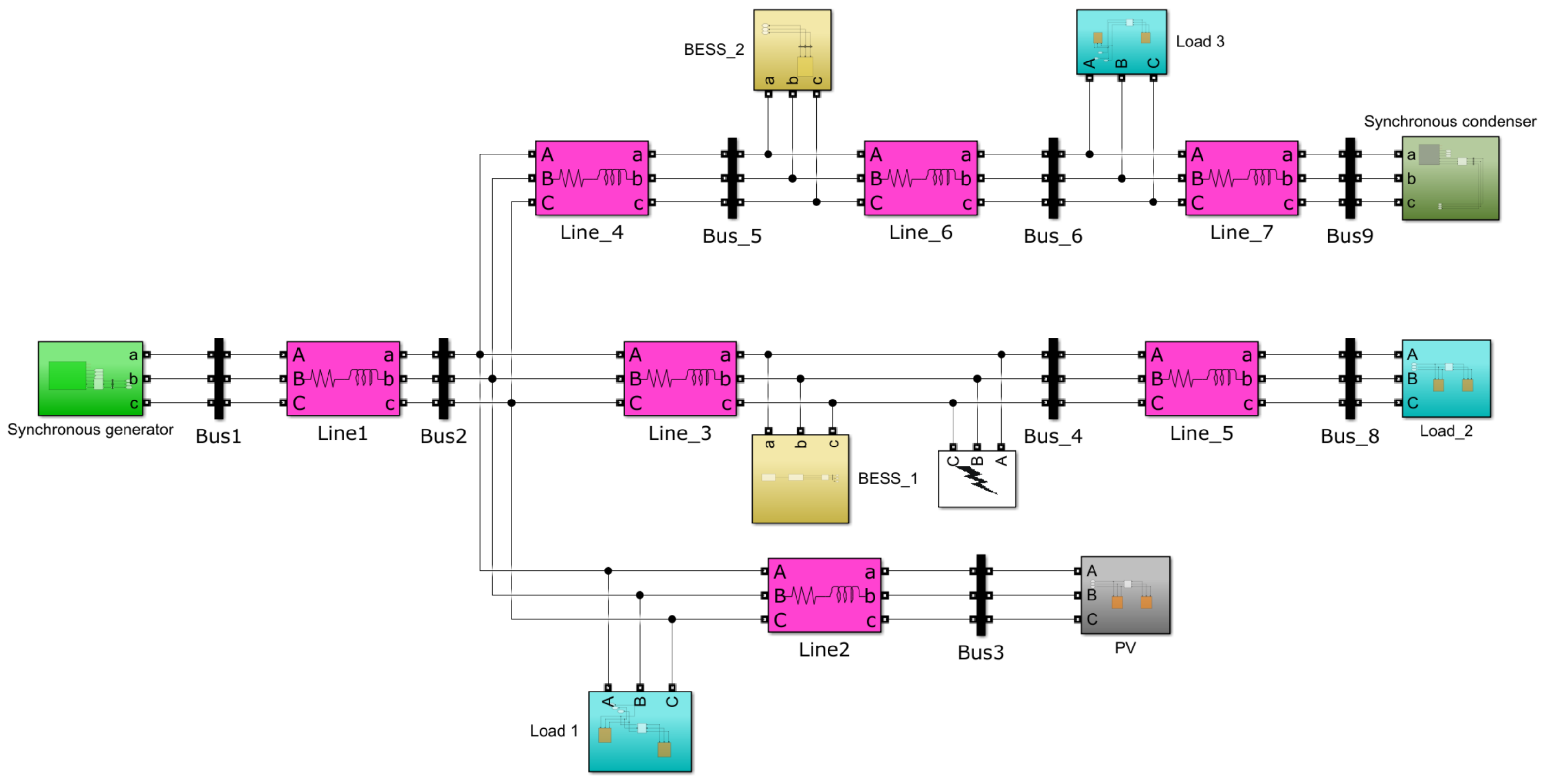
3. The Studied System
4. Results
4.1. With and without SC in Operation
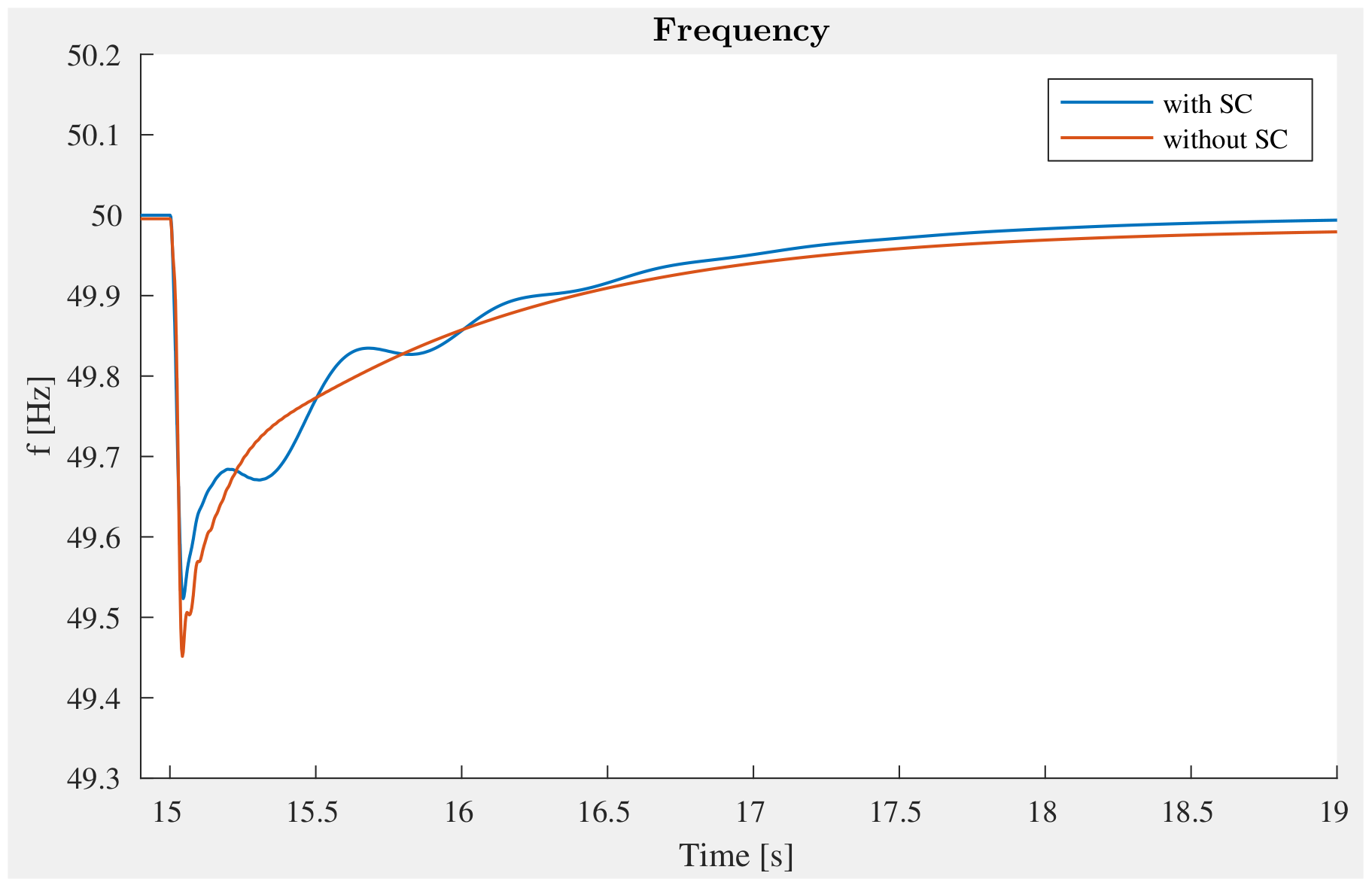
- Load step change:In this part, a 6-MW load increase disturbance happens at t = 15 s; the results show the comparison with and without SC in the distributed secondary control. Figure 4, Figure 5 and Figure 6 show the comparison of the system responses in both operation cases. As can be clearly seen from these figures, the system responses have been significantly improved with SC. With the inertial response from SC, the ROCOF of the system is enhanced dramatically from 26 Hz/s to 18 Hz/s, while the frequency nadir is not that significant but still improved. It can be explained that SC is only participating in the inertial response to help ROCOF at the onset of the disturbance. The same pattern is observed on the voltage magnitude at bus 6, as shown in Figure 5; the voltage magnitude has improved both pre- and post-disturbance with SC in the operation. Figure 6 shows the frequency response; it can clearly be seen that when SC is in operation, the frequency nadir and the settling frequency values are better than without SC.
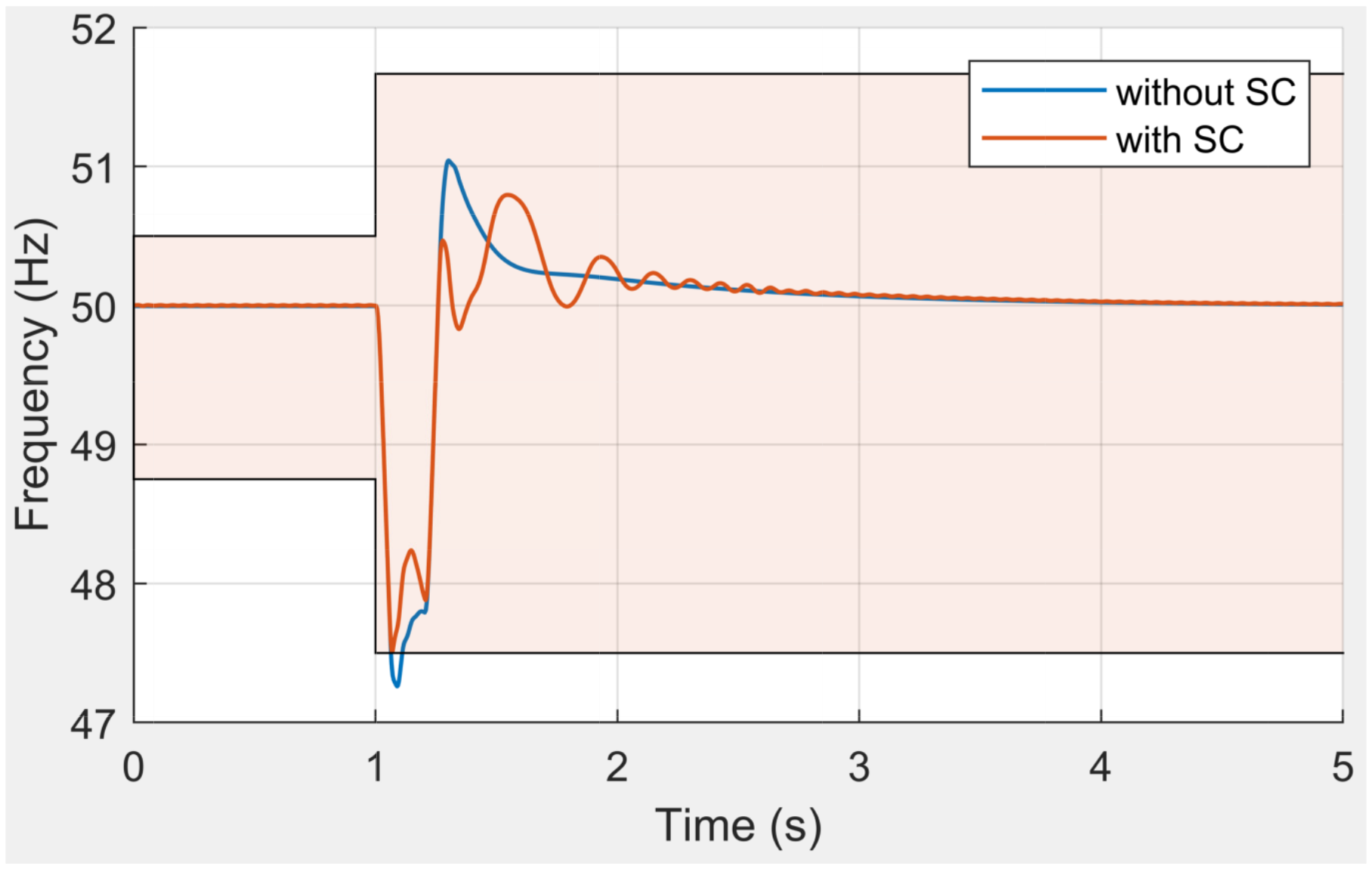
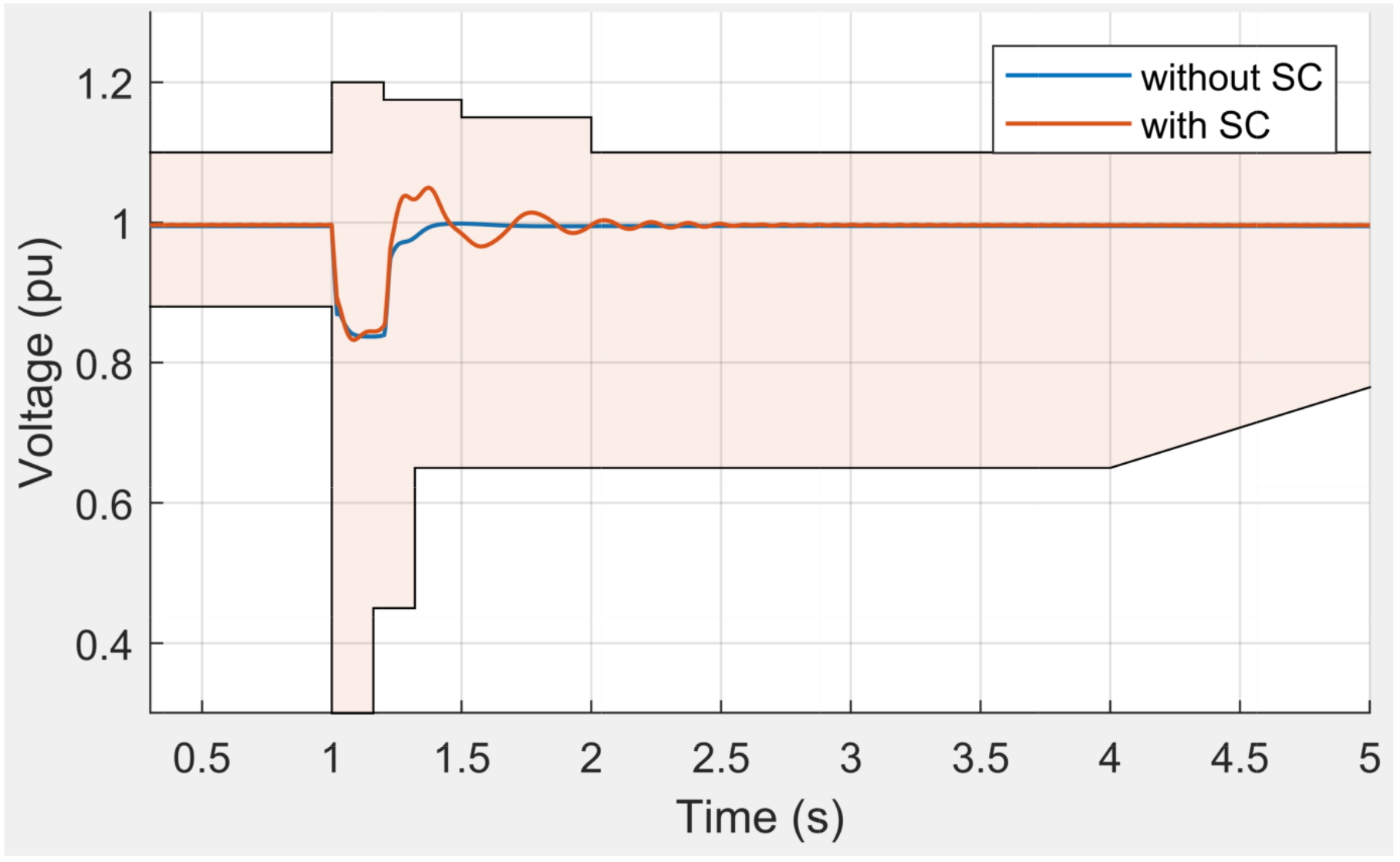
- Three phase short circuit fault:In this section, a scenario with a three-phase short circuit fault is considered. The fault event occurs at bus 4 at s and it is cleared after 200 ms with fault impedance . Figure 7 and Figure 8 show the comparison results of system frequency and voltage in both cases of using and not using SC to highlight the contribution of SC in supporting system stability. The IEEE 1547-2018 standard is also expressed in the figures to check the fault ride-through ability of DER integration. It can be seen that with SC, the frequency is within the allowable range, while it is out of the range with a large over/undershoot without SC. The voltages in both cases are still satisfied with the requirement. With the given value of fault impedance, the voltage does not drop much [18], around 0.83 pu, as shown in Figure 8. As a result, we do not see a significant contribution of SC for voltage support here. It can be concluded that in the fault condition, SC helps the system to enhance frequency stability.
4.2. Distributed Secondary Control
- (i)
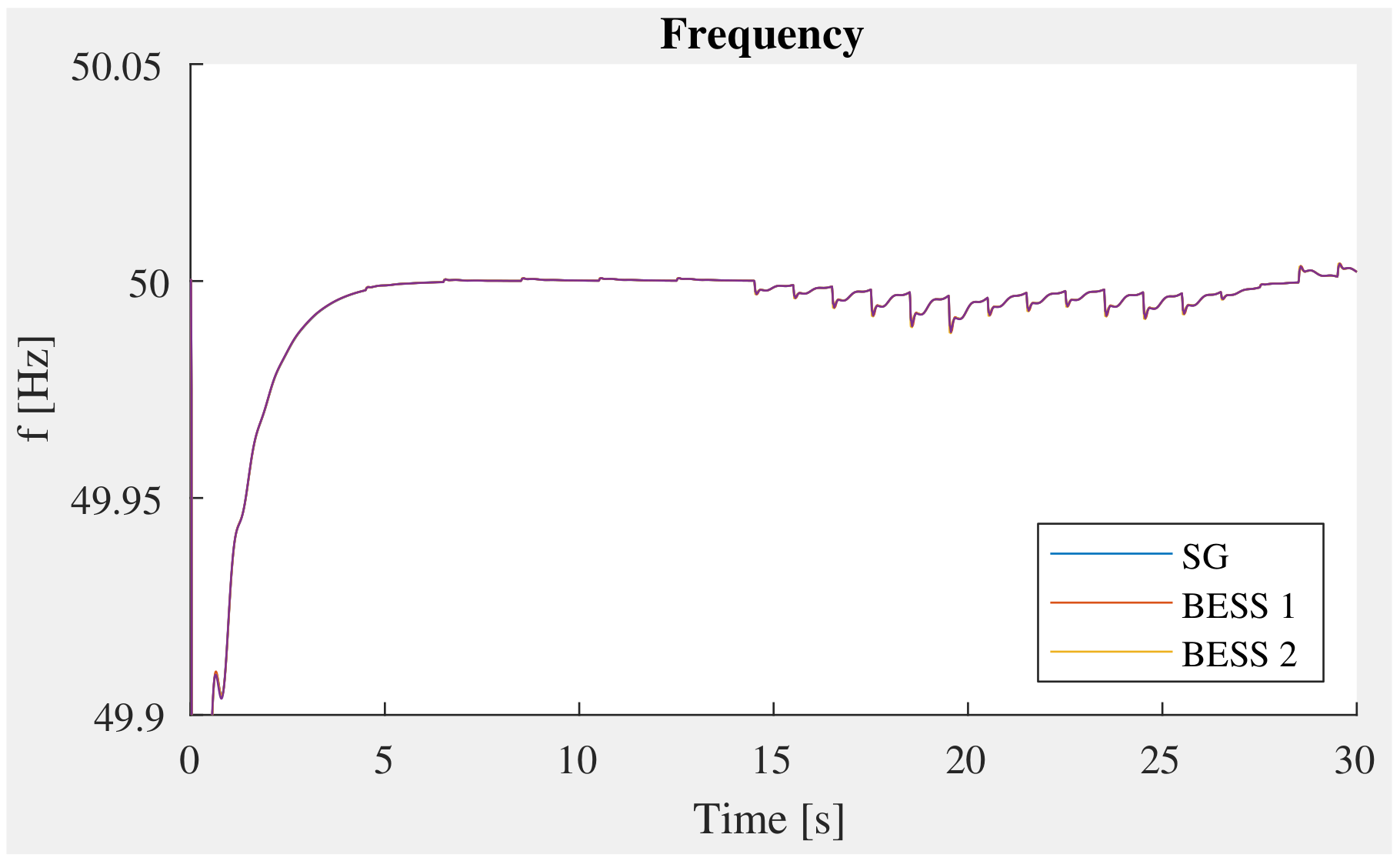
- Frequency restoration: it can be seen from Figure 9 that, with the proposed distributed secondary control (blue line), the frequency is rapidly recovered to the nominal value (50 Hz), while in the case without the secondary controller, the frequency deviation is not mitigated and the frequency remains at Hz after the load increase disturbance.
- (ii)
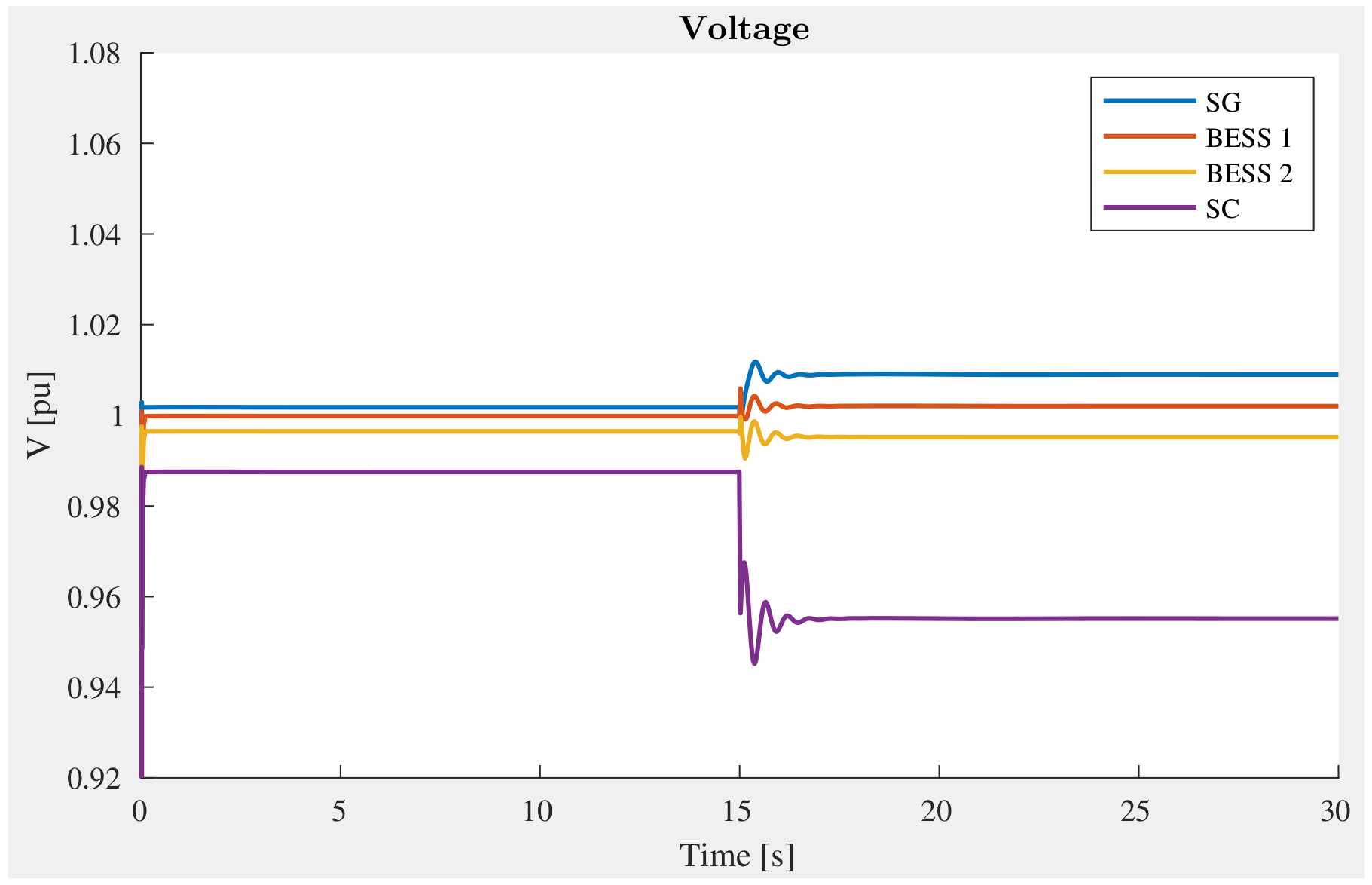
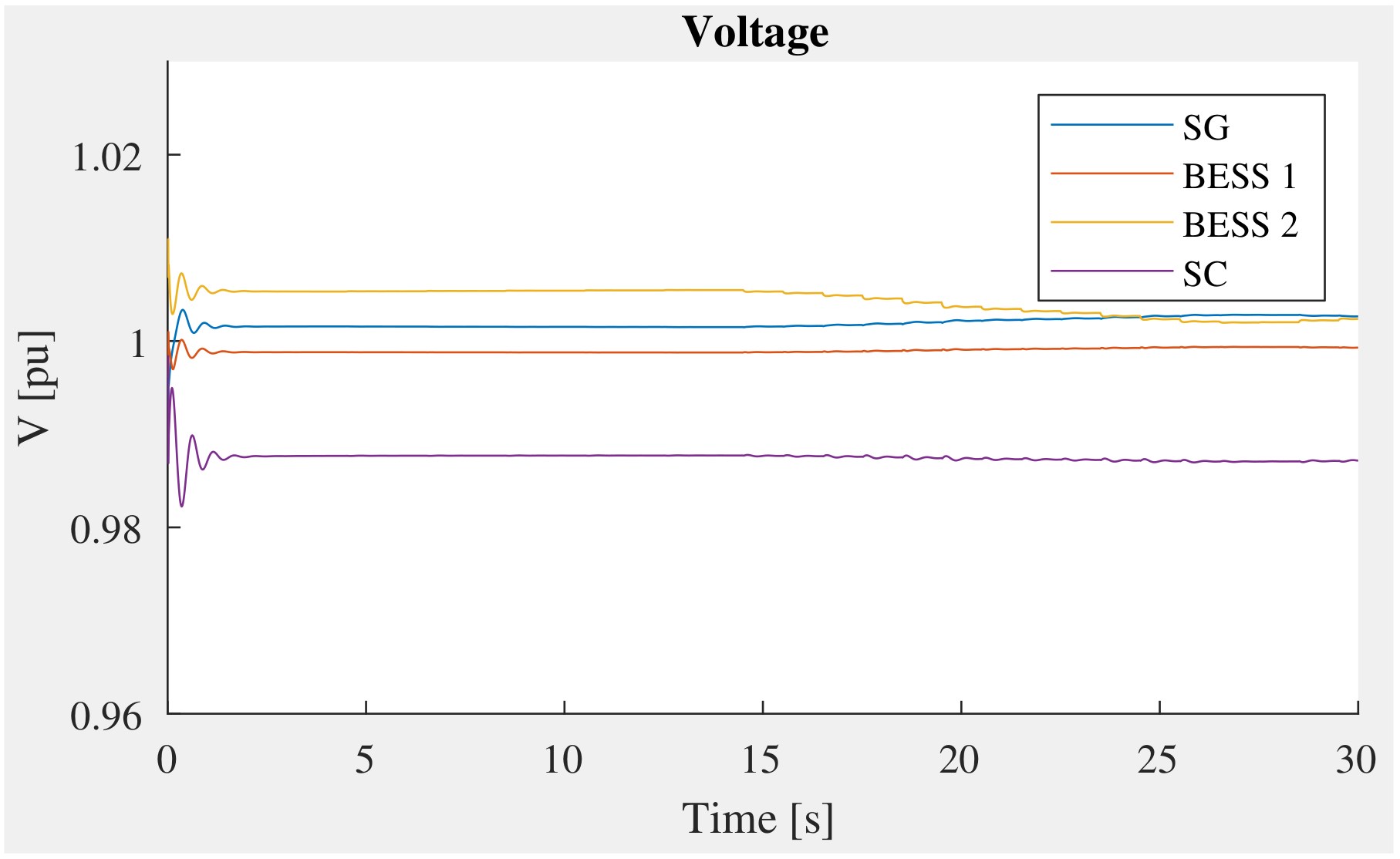
- Average voltage restoration: Figure 10 shows how the average voltage can be quickly brought back to the nominal value with the proposed control. However, the average value is approximately pu when the system operates without the proposed control. Figure 11 shows the actual voltages measured at DER buses, which are controlled within thresholds.
- (iii)
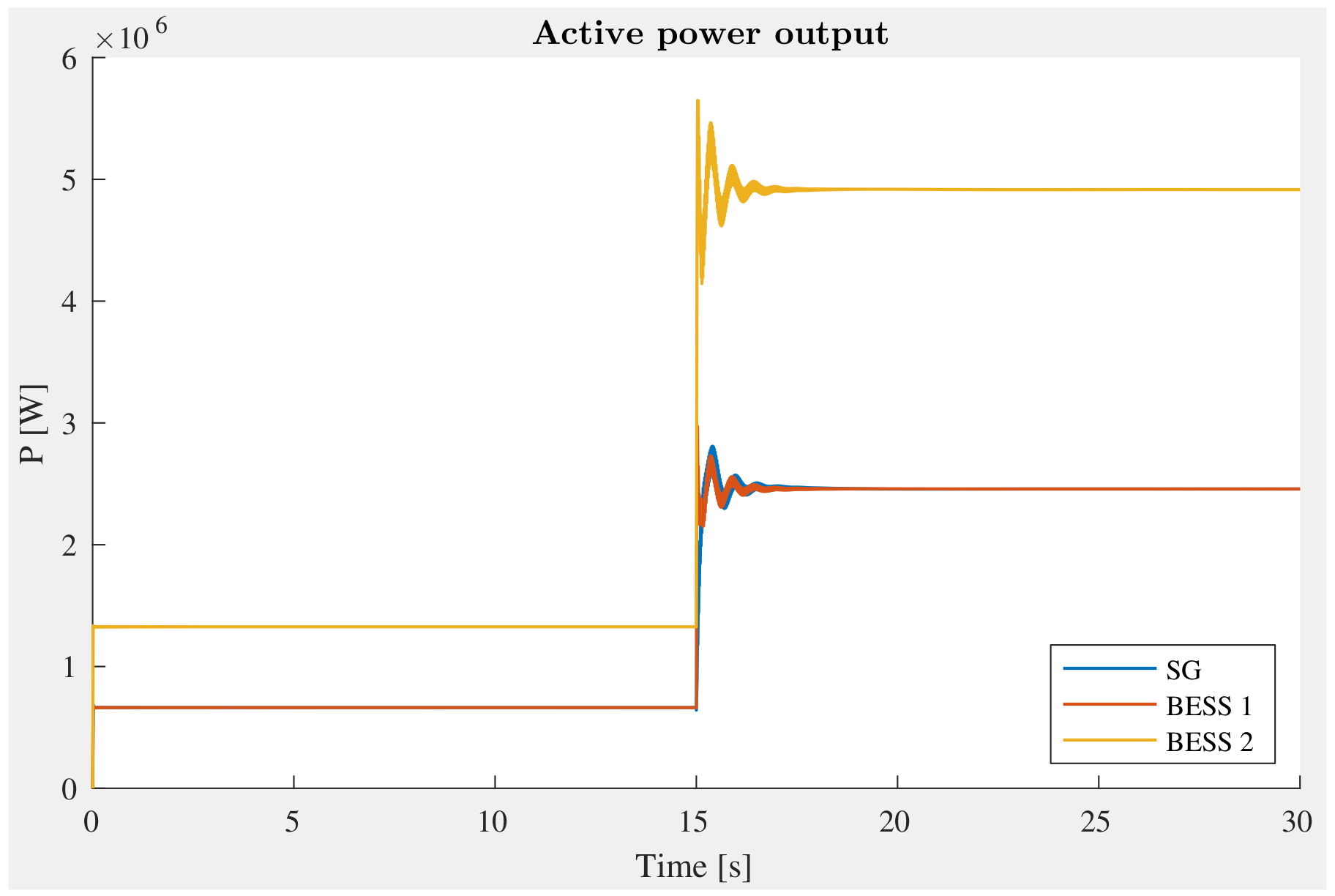
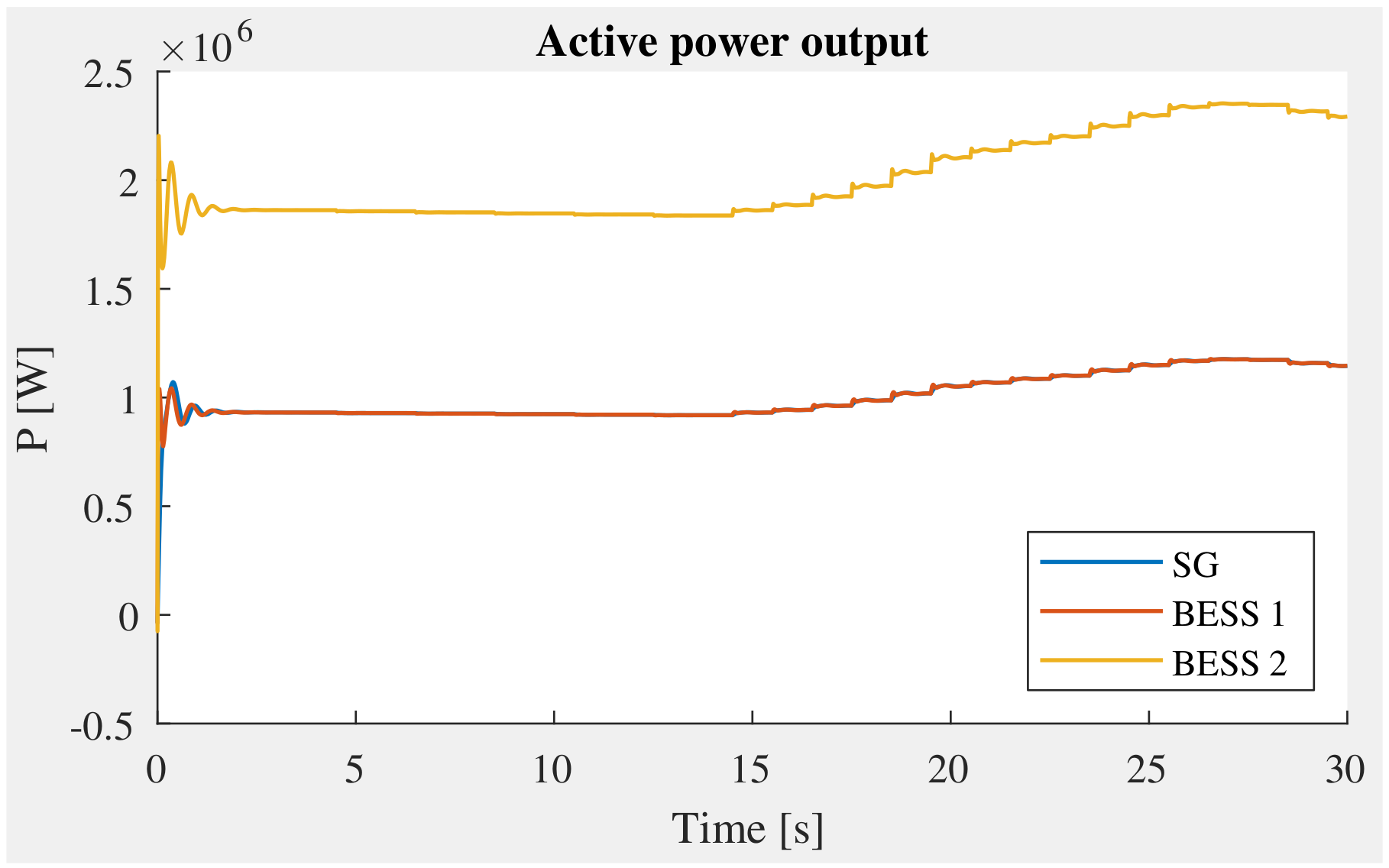
- Arbitrary active power-sharing among SGs and BESSs: the active power of two BESSs and one SG rapidly respond to share the power imbalance of the system, as shown in Figure 12. Here, we notice that SG and BESS 1 have the same droop control gain, then as expected, they share the same amount of active power contribution, while that of BESS 2 is double, as seen in Figure 12. The secondary control ensures the accuracy of power-sharing as the initial design.
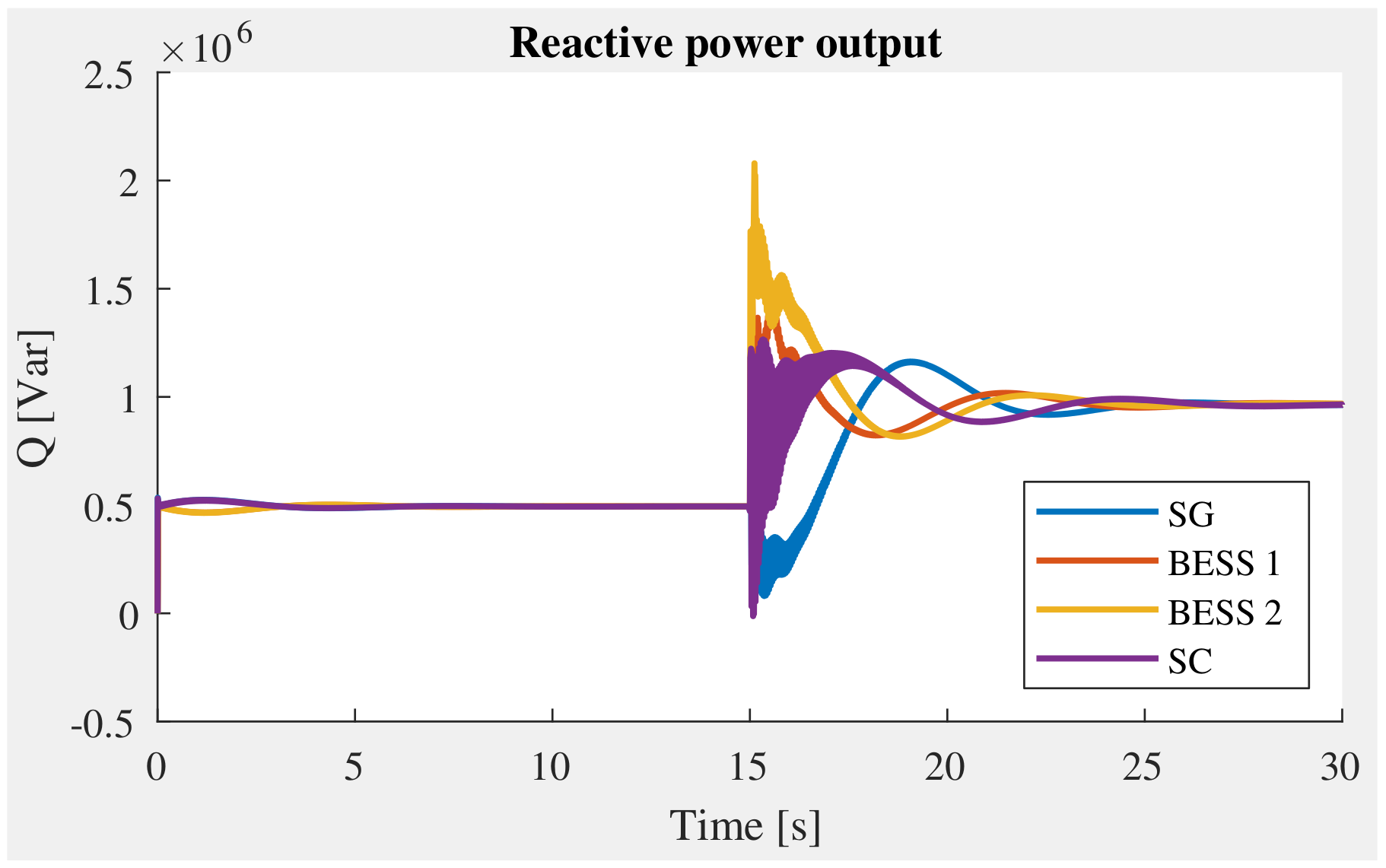
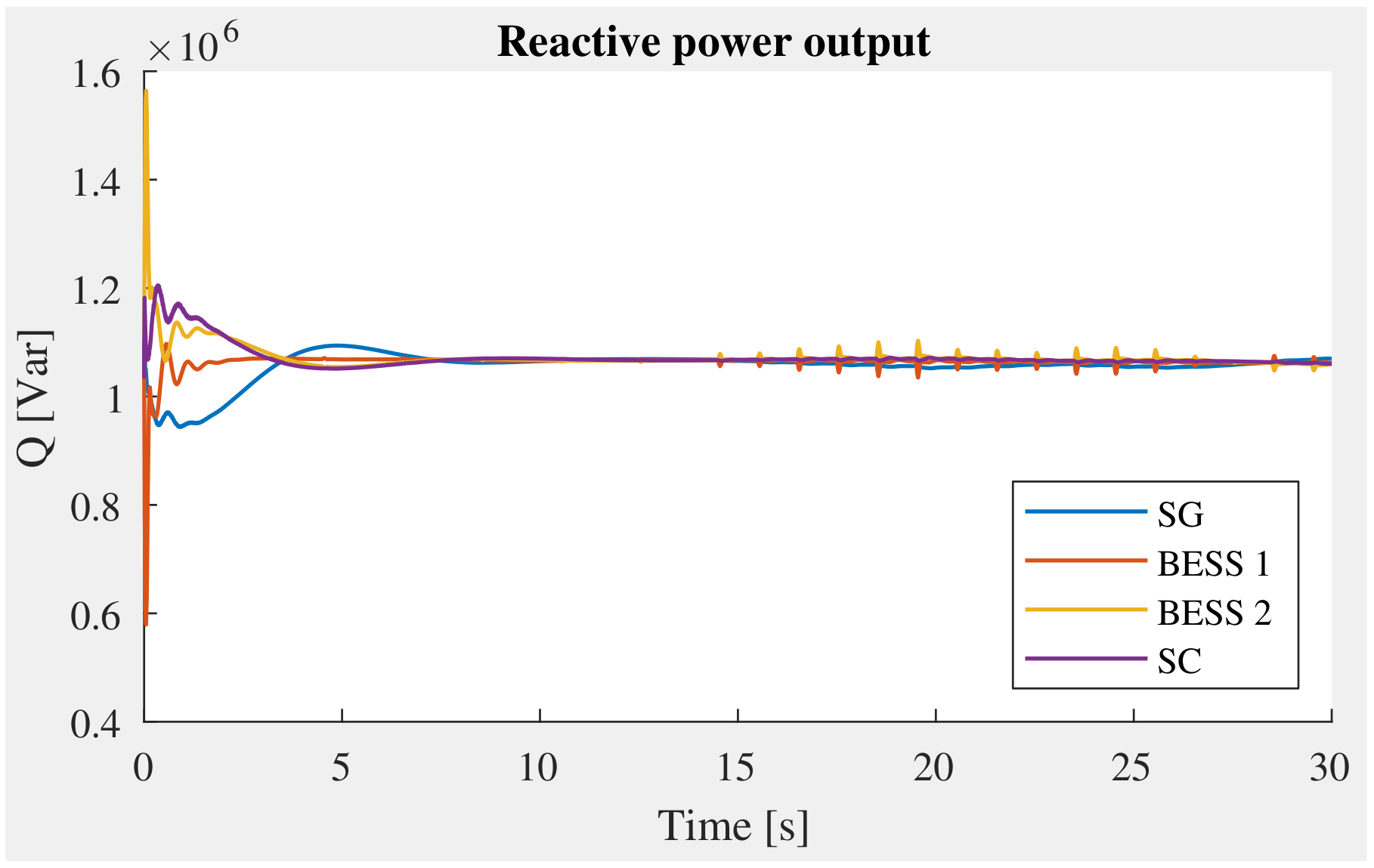
- (iv)
- Arbitrary reactive power sharing among all SGs, BESSs and SCs: Figure 13 shows the reactive power contribution from different resources participating in the control. It can be seen clearly that the responses from BESSs are faster than that of SC and SG. This can be explained by the fast response of power converter control in comparison with rotating machines, which need more time for the excitation system to accelerate its electromagnetic field. The settling time of BESSs is also shorter than that of the rotating machines.
4.3. Test Case with a Renewable Energy Resource
4.4. Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DERs | Distributed Energy Resources |
| SCs | Synchronous Condensers |
| MGs | Microgrids |
| MGCC | Microgrid Central Controller |
| SCL | Short Circuit Level |
| PLL | Phase-Locked Loop |
| BESSs | Battery Energy Storage Systems |
| ROCOF | Rate of Change of Frequency |
| DC | Direct current |
| AC | Alternative current |
References
- Nguyen, H.T.; Guerriero, C.; Yang, G.; Boltonand, C.J.; Rahman, T.; Jensen, P.H. Talega SynCon—Power Grid Support for Renewable-based Systems. In Proceedings of the 2019 SoutheastCon, Huntsville, AL, USA, 11–14 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Yang, G.; Nielsen, A.H.; Jensen, P.H. Combination of Synchronous Condenser and Synthetic Inertia for Frequency Stability Enhancement in Low-Inertia Systems. IEEE Trans. Sustain. Energy 2019, 10, 997–1005. [Google Scholar] [CrossRef] [Green Version]
- Payerl, C. Synchronous Condensers Rediscovered—A New Way to Strengthen Grids. Technical Report. 2021. Available online: https://library.e.abb.com/public/c8adfa0169c44de3b6ed8ba186121922/Synchronous_condensers_rediscovered_Jun_2021.pdf (accessed on 17 January 2022).
- Nguyen, H.T.; Yang, G.; Nielsen, A.H.; Jensen, P.H.; Pal, B. Applying Synchronous Condenser for Damping Provision in Converter-dominated Power System. J. Mod. Power Syst. Clean Energy 2021, 9, 639–647. [Google Scholar] [CrossRef]
- Bao, L.; Fan, L.; Miao, Z. Comparison of Synchronous Condenser and STATCOM for Wind Farms in Weak Grids. In Proceedings of the 2020 52nd North American Power Symposium (NAPS), Tempe, AZ, USA, 11–13 April 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Surya, A.S.; Partahi Marbun, M.; Marwah, M.; Mangunkusumo, K.; Harsono, B.B.S.; Bernando Tambunan, H. Study of Synchronous Condenser Impact in Jawa-Madura-Bali System to Provide Ancillary Services. In Proceedings of the 2020 12th International Conference on Information Technology and Electrical Engineering (ICITEE), Yogyakarta, Indonesia, 6–8 October 2020; pp. 234–238. [Google Scholar] [CrossRef]
- Fan, X.; Youbin, Z.; Lin, R.; Kunpeng, Z.; Tao, W.; Kan, C.; Yuze, R. Study on Transient Reactive Power Characteristics of New-Generation Large Synchronous Condenser. In Proceedings of the 2018 China International Conference on Electricity Distribution (CICED), Tianjin, China, 17–19 September 2018; pp. 1851–1855. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Distributed Control Techniques in Microgrids. IEEE Trans. Smart Grid 2014, 5, 2901–2909. [Google Scholar] [CrossRef]
- Wang, Y.; Nguyen, T.L.; Syed, M.H.; Xu, Y.; Guillo-Sansano, E.; Nguyen, V.H.; Burt, G.M.; Tran, Q.T.; Caire, R. A Distributed Control Scheme of Microgrids in Energy Internet Paradigm and Its Multisite Implementation. IEEE Trans. Ind. Inform. 2021, 17, 1141–1153. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Nguyen, T.L.; Xu, Y.; Li, Z.; Tran, Q.T.; Caire, R. Cyber-Physical Design and Implementation of Distributed Event-Triggered Secondary Control in Islanded Microgrids. IEEE Trans. Ind. Appl. 2019, 55, 5631–5642. [Google Scholar] [CrossRef]
- Guo, F.; Wen, C.; Mao, J.; Song, Y.D. Distributed Secondary Voltage and Frequency Restoration Control of Droop-Controlled Inverter-Based Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4355–4364. [Google Scholar] [CrossRef]
- Simpson-Porco, J.W.; Shafiee, Q.; Dörfler, F.; Vasquez, J.C.; Guerrero, J.M.; Bullo, F. Secondary Frequency and Voltage Control of Islanded Microgrids via Distributed Averaging. IEEE Trans. Ind. Electron. 2015, 62, 7025–7038. [Google Scholar] [CrossRef]
- Schiffer, J.; Seel, T.; Raisch, J.; Sezi, T. Voltage Stability and Reactive Power Sharing in Inverter-Based Microgrids with Consensus-Based Distributed Voltage Control. IEEE Trans. Control. Syst. Technol. 2016, 24, 96–109. [Google Scholar] [CrossRef] [Green Version]
- Babayomi, O.; Li, Z.; Zhang, Z. Distributed secondary frequency and voltage control of parallel-connected vscs in microgrids: A predictive VSG-based solution. CPSS Trans. Power Electron. Appl. 2020, 5, 342–351. [Google Scholar] [CrossRef]
- Dehghan Banadaki, A.; Feliachi, A.; Kulathumani, V.K. Fully Distributed Secondary Voltage Control in Inverter-Based Microgrids. In Proceedings of the 2018 IEEE/PES Transmission and Distribution Conference and Exposition (T & D), Denver, CO, USA, 16–19 April 2018; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- Espina, E.; Llanos, J.; Burgos-Mellado, C.; Cárdenas-Dobson, R.; Martínez-Gómez, M.; Sáez, D. Distributed Control Strategies for Microgrids: An Overview. IEEE Access 2020, 8, 193412–193448. [Google Scholar] [CrossRef]
- Vazquez Pombo, D. Cape Verde Reference Power System Data. 2021. Available online: https://data.dtu.dk/articles/dataset/Cape_Verde_Reference_Power_System_Data/13251524 (accessed on 17 January 2022).
- The Hoang, T.; Tuan Tran, Q.; Besanger, Y. An advanced protection scheme for medium-voltage distribution networks containing low-voltage microgrids with high penetration of photovoltaic systems. Int. J. Electr. Power Energy Syst. 2022, 139, 107988. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P (MW) | Q (MVAr) | S (MVA) | |
|---|---|---|---|
| SG | 3 | ||
| SC | 3 | ||
| BESS 1 | 3 | ||
| BESS 2 | 6 | ||
| PV1 | 3 | ||
| Load 1 | 2.8 | 2.2 | |
| Load 2 | 3.5 | 2.7 | |
| Load 3 | 3.0 | 2.5 |
| Resistance (Ohm) | Reactance (Ohm) | Line Name |
|---|---|---|
| 0.97 | 0.384 | z1 |
| 0.85 | 0.298 | z2 |
| 0.473 | 0.316 | z3 |
| 0.548 | 0.224 | z4 |
| 1.028 | 0.258 | z5 |
| 0.38 | 0.17 | z6 |
| 0.279 | 0.182 | z7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.L.; Nguyen, H.T.; Wang, Y.; Mohammed, O.A.; Anagnostou, E. Distributed Secondary Control in Microgrids Using Synchronous Condenser for Voltage and Frequency Support. Energies 2022, 15, 2968. https://doi.org/10.3390/en15082968
Nguyen TL, Nguyen HT, Wang Y, Mohammed OA, Anagnostou E. Distributed Secondary Control in Microgrids Using Synchronous Condenser for Voltage and Frequency Support. Energies. 2022; 15(8):2968. https://doi.org/10.3390/en15082968
Chicago/Turabian StyleNguyen, Tung Lam, Ha Thi Nguyen, Yu Wang, Osama A. Mohammed, and Emmanouil Anagnostou. 2022. "Distributed Secondary Control in Microgrids Using Synchronous Condenser for Voltage and Frequency Support" Energies 15, no. 8: 2968. https://doi.org/10.3390/en15082968
APA StyleNguyen, T. L., Nguyen, H. T., Wang, Y., Mohammed, O. A., & Anagnostou, E. (2022). Distributed Secondary Control in Microgrids Using Synchronous Condenser for Voltage and Frequency Support. Energies, 15(8), 2968. https://doi.org/10.3390/en15082968