
Detection of Demagnetization Faults in Axial Flux Permanent-Magnet Synchronous Wind Generators



Abstract
:1. Introduction
2. Theoretical Analysis of the Proposed Fault Detection Method
2.1. PMSG Faults and Diagnosis Means
- (a)
- inter-turn short circuit faults (ISC);
- (b)
- static eccentricity (SE);
- (c)
- dynamic eccentricity (DE);
- (d)
- mixed eccentricity (ME);
- (e)
- partial or complete demagnetization of the rotor (DM).
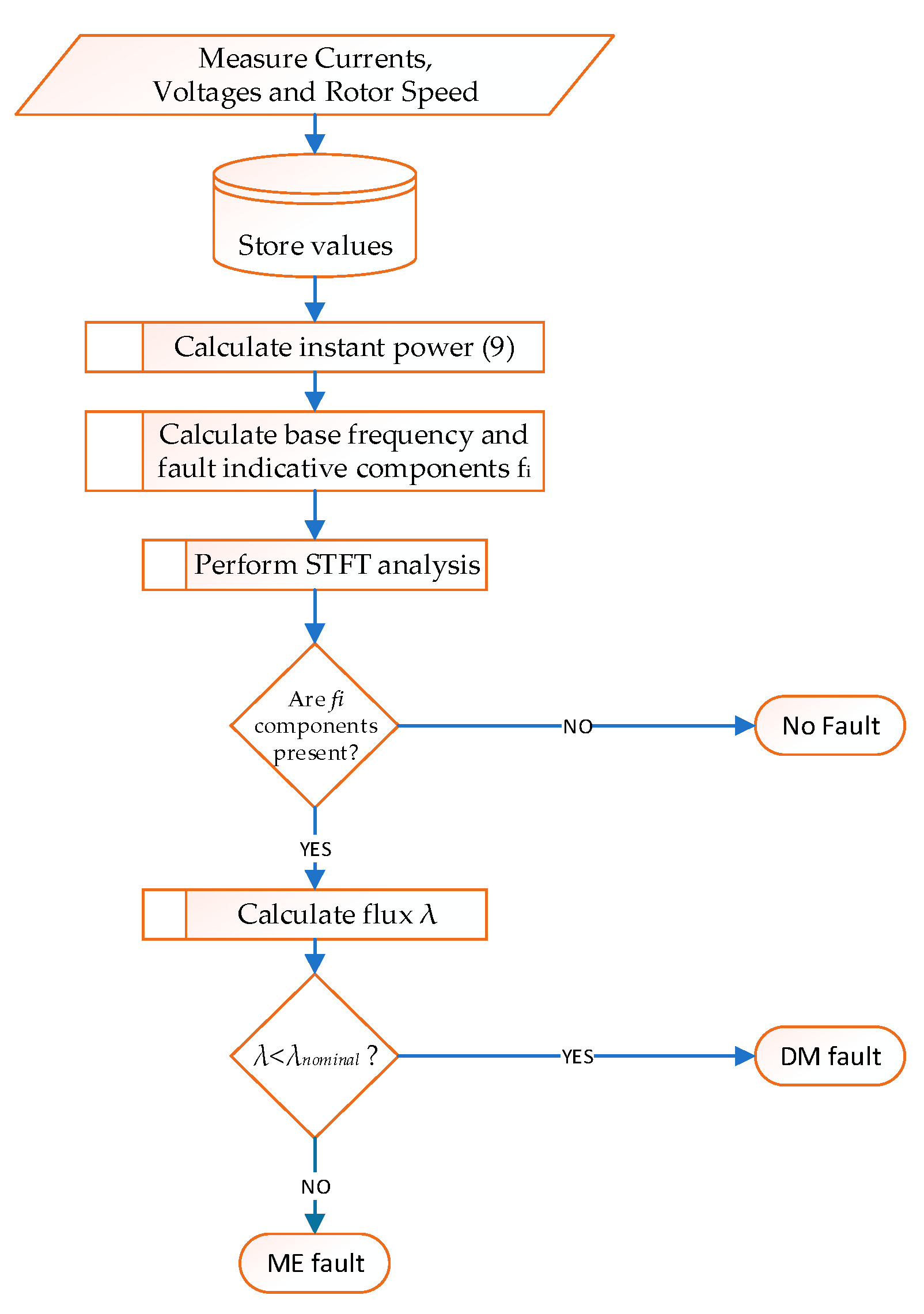
2.2. Detection of Demagnetization Faults Using the Instataneous Power
- Speed variations are assumed to be slow compared to the electric quantities period;
- Small deviations of the estimated flux from its actual value do not affect the proposed method.
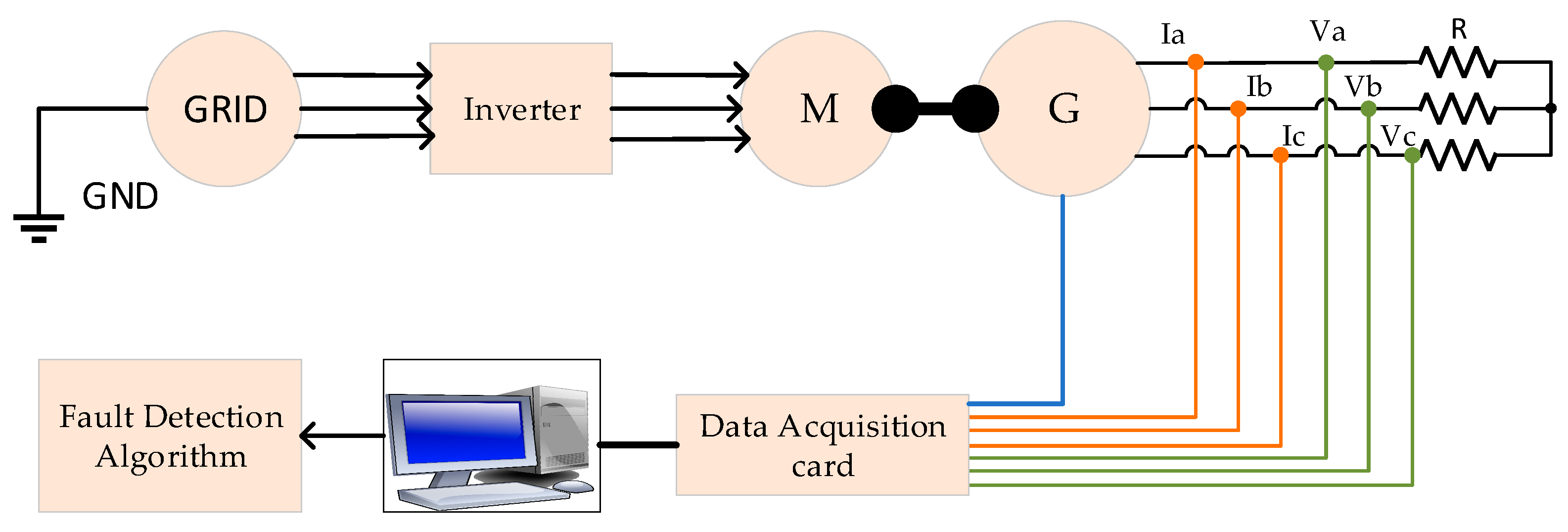
3. Experimental Setup
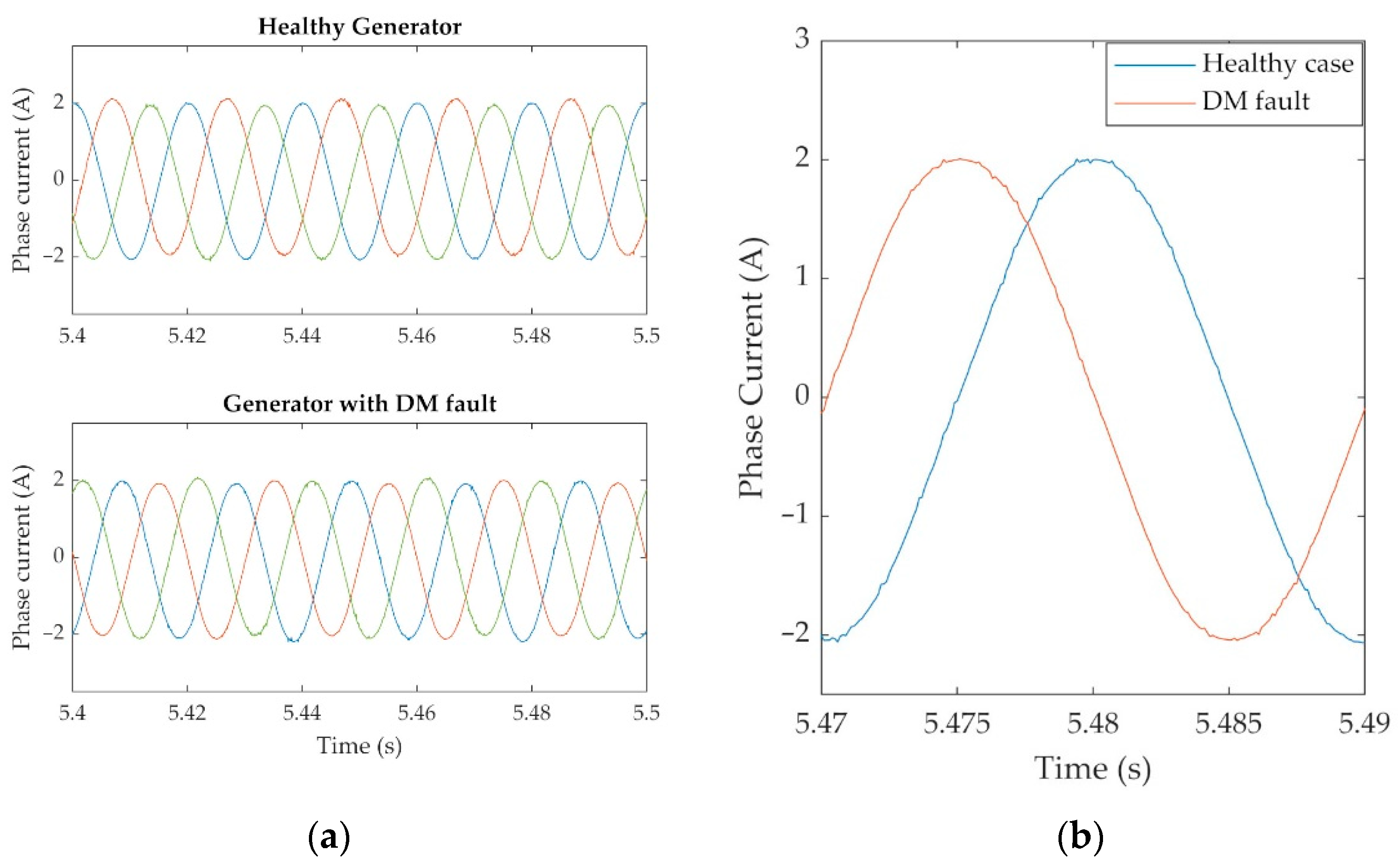
3.1. Operation under Steady-State Condition
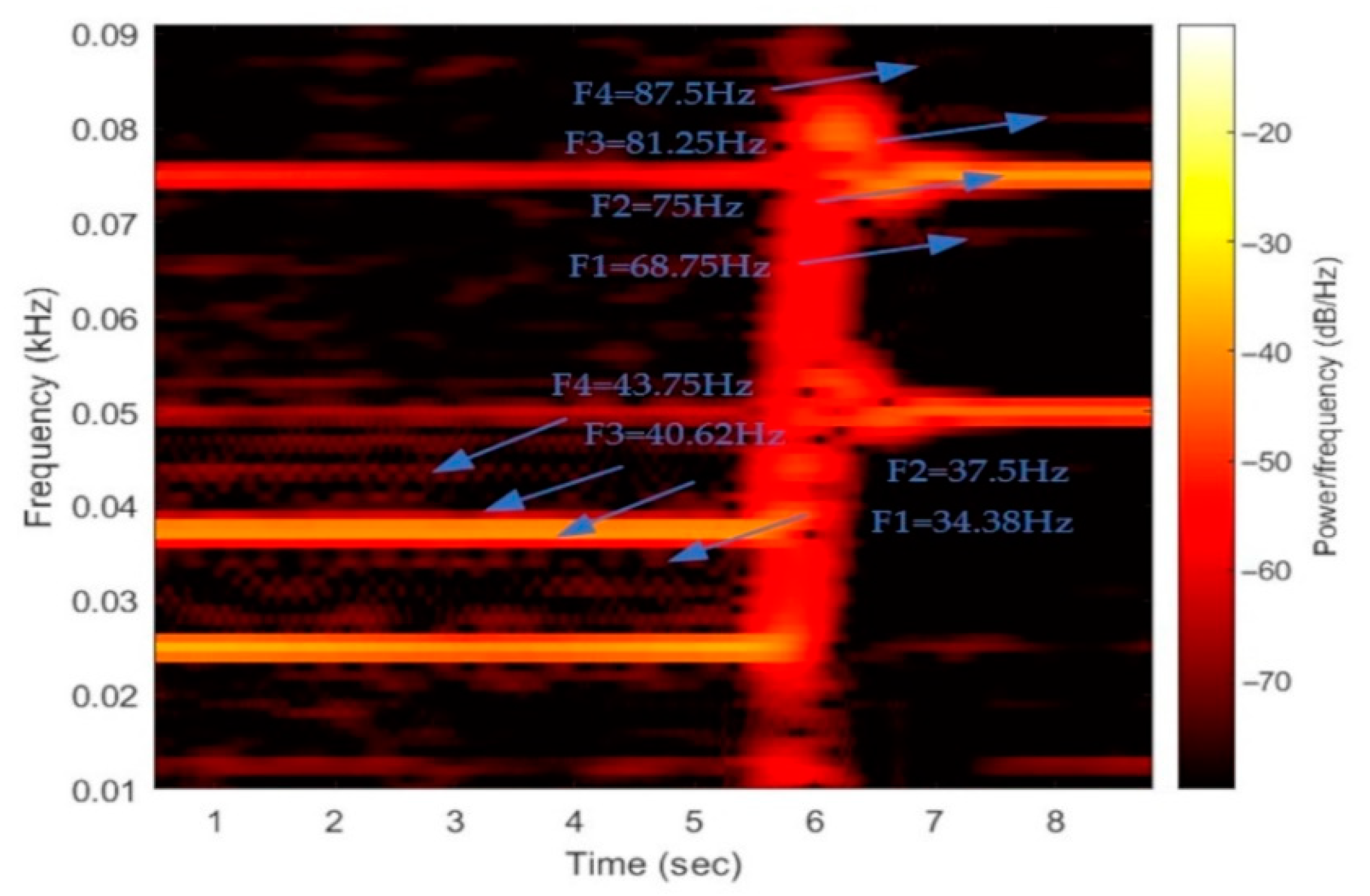
3.2. Transient Operation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, Y.; Liang, S.; Li, W.; Liang, H.; Wang, C. Faults and Diagnosis Methods of Permanent Magnet Synchronous Motors: A Review. Appl. Sci. 2019, 9, 2116. [Google Scholar] [CrossRef] [Green Version]
- Moosavi, S.S.; Djerdir, A.; Amirat, Y.A.; Khaburi, D.A. Demagnetization fault diagnosis in permanent magnet synchronous motors: A review of the state-of-the-art. J. Magn. Magn. Mater. 2015, 391, 203–212. [Google Scholar] [CrossRef]
- Urresty, J.C.; Riba, J.R.; Delgado, M.; Romeral, L. Detection of Demagnetization Faults in Surface-Mounted Permanent Magnet Synchronous Motors by Means of the Zero-Sequence Voltage Component. IEEE Trans. Energy Convers. 2012, 27, 42–51. [Google Scholar] [CrossRef]
- Gao, C.; Nie, Y.; Si, J.; Fu, Z.; Feng, H. Mode Recognition and Fault Positioning of Permanent Magnet Demagnetization for PMSM. Energies 2019, 12, 1644. [Google Scholar] [CrossRef] [Green Version]
- Haddad, R.Z.; Strangas, E.G. Fault Detection and Classification in Permanent Magnet Synchronous Machines using Fast Fourier Transform and Linear Discriminant Analysis. In Proceedings of the 2013 9th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Valencia, Spain, 27–30 August 2013; pp. 99–104. [Google Scholar]
- Haddad, R.Z.; Strangas, E.G. On the Accuracy of Fault Detection and Separation in Permanent Magnet Synchronous Machines using MCSA/MVSA and LDA. IEEE Trans. Energy Convers. 2016, 31, 924–934. [Google Scholar] [CrossRef]
- Ruiz, J.R.; Rosero, J.A.; Espinosa, A.G.; Romeral, L. Detection of Demagnetization Faults in Permanent-Magnet Synchronous Motors Under Nonstationary Conditions. IEEE Trans. Magn. 2009, 45, 2961–2969. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Roshtkhari, M.J.; Faiz, J.; Khatami, S.V. Advanced Eccentricity Fault Recognition in Permanent Magnet Synchronous Motors using Stator Current Signature Analysis. IEEE Trans. Ind. Electron. 2013, 61, 2041–2052. [Google Scholar] [CrossRef]
- Gliga, L.I.; Chafouk, H.; Popescu, D.; Lupu, C. Diagnosis of a Permanent Magnet Synchronous Generator using the Extended Kalman Filter and the Fast Fourier Transform. In Proceedings of the 2018 7th International Conference on Systems and Control (ICSC), Valencia, Spain, 24–26 October 2018; pp. 65–70. [Google Scholar]
- El Sayed, W.; Abd El Geliel, M.; Lotfy, A. Fault Diagnosis of PMSG Stator Inter-Turn Fault Using Extended Kalman Filter and Unscented Kalman Filter. Energies 2020, 13, 2972. [Google Scholar] [CrossRef]
- Rosero, J.; Romeral, L.; Ortega, J.A.; Urresty, J.C. Demagnetization Fault Detection by means of Hilbert Huang Transform of the stator current Decomposition in PMSM. In Proceedings of the 2008 IEEE International Symposium on Industrial Electronics, Cambridge, UK, 30 June–2 July 2008; Volume 68, pp. 310–324. [Google Scholar]
- Kao, I.H.; Wang, W.J.; Lai, Y.H.; Perng, J.W. Analysis of Permanent Magnet Synchronous Motor Fault Diagnosis Based on Learning. IEEE Trans. Instrum. Meas. 2019, 68, 310–324. [Google Scholar] [CrossRef]
- Moon, S.; Lee, J.; Jeong, H.; Kim, S.W. Demagnetization Fault Diagnosis of a PMSM Based on Structure Analysis of Motor Inductance. IEEE Trans. Ind. Electron. 2016, 63, 3795–3803. [Google Scholar] [CrossRef]
- Hong, J.; Park, S.; Hyun, D.; Kang, T.J.; Lee, S.B.; Kral, C.; Haumer, A. Detection and Classification of Rotor Demagnetization and Eccentricity Faults for PM Synchronous Motors. IEEE Trans. Ind. Appl. 2012, 48, 923–932. [Google Scholar] [CrossRef]
- Le Roux, W.; Harley, R.G.; Habetler, T.G. Detecting Rotor Faults in Low Power Permanent Magnet Synchronous Machines. IEEE Trans. Power Electron. 2007, 22, 322–328. [Google Scholar] [CrossRef]
- De Bisschop, J.; Vansompel, H.; Sergeant, P.; Dupre, L. Demagnetization Fault Detection in Axial Flux PM Machines by Using Sensing Coils and an Analytical Model. IEEE Trans. Magn. 2017, 53, 8203404. [Google Scholar] [CrossRef]
- De Bisschop, J.; Sergeant, P.; Hemeida, A.; Vansompel, H.; Dupré, L. Analytical Model for Combined Study of Magnet Demagnetization and Eccentricity Defects in Axial Flux Permanent Magnet Synchronous Machines. IEEE Trans. Mag. 2017, 53, 8107712. [Google Scholar] [CrossRef]
- Ajily, E.; Ardebili, M.; Abbaszadeh, K. Magnet defect and rotor eccentricity modeling in axial-flux permanent-magnet machines via 3-D Field Reconstruction Method. IEEE Trans. Ener. Conv. 2016, 31, 486–495. [Google Scholar] [CrossRef]
- Saavedra, H.; Riba, J.R.; Romeral, L. Magnet shape influence on the performance of AFPMM with demagnetization. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 973–977. [Google Scholar]
- Bahador, N.; Darabi, A.; Hasanabadi, H. Demagnetization analysis of axial flux permanent magnet motor under three phase short circuit fault. In Proceedings of the 4th Annual International Power Electronics, Drive Systems and Technologies Conference, Tehran, Iran, 13–14 February 2013; pp. 333–337. [Google Scholar]
- Barmpatza, A.C.; Kappatou, J.C. Investigation of the combined eccentricity and demagnetization fault in an AFPMSG. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020. [Google Scholar]
- Barmpatza, A.C.; Kappatou, J.C. Study of the demagnetization fault in an AFPM machine in relation with the magnet location. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018. [Google Scholar]
- Barmpatza, A.C.; Kappatou, J.C. Study of a Combined Demagnetization and Eccentricity Fault in an AFPM Synchronous Generator. Energies 2020, 13, 5609. [Google Scholar] [CrossRef]
- Verkroost, L.; De Bisschop, J.; Vansompel, H.; De Belie, F.; Sergeant, P. Active Demagnetization Fault Compensation for Axial Flux Permanent-Magnet Synchronous Machines Using an Analytical Inverse Model. IEEE Trans. Ener. Conv. 2020, 35, 591–599. [Google Scholar] [CrossRef]
- Skarmoutsos, G.; Gyftakis, K.; Mueller, M. Detecting Partial Demagnetization in AFPM Generators by Monitoring Speed and EMF Induced in a Supplemental Winding. IEEE Trans. Ind. Infor. 2022, 18, 3295–3305. [Google Scholar] [CrossRef]
- Mínaz, M.R.; Akcan, E. An Effective Method for Detection of Demagnetization Fault in Axial Flux Coreless PMSG with Texture-Based Analysis. IEEE Access 2021, 9, 17438–17449. [Google Scholar] [CrossRef]
- Ioannis, P.T. Dynamic Analysis and Development of Diagnostic Methods for Controlled Motor System Consisting of a Slip Ring Asynchronous Machine and Power Electronic Converters. Doctoral Thesis, University of Patras, Patras, Greece, November 2007. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Type | Indicative Frequency |
|---|---|
| Inter-turn short circuit faults (ISC) | , (k = 1, 2, 3, …) |
| Mixed eccentricity (ME) | , (k = 1, 2, 3, …) |
| Demagnetization of the rotor (DM) | , (k = 1, 2, 3, …) |
| Parameter | Value |
|---|---|
| Nominal Power | 350 W |
| Nominal Voltage | 80 V |
| Nominal frequency (fs) | 50 Hz |
| Nominal speed (ns) | 375 rpm |
| Number of poles for each rotor | 16 |
| Stator Phase Resistance | 5.89 Ohm |
| Stator Phase Inductance | 17 mH |
| Number of Harmonic | f(Hz) | Healthy Machine (dB) | Demagnetized Machine (dB) |
|---|---|---|---|
| (11 fs/p) | 68.75 | −81.0 | −66.4 |
| (12 fs/p) | 75.00 | −49.5 | −28.4 |
| (13 fs/p) | 81.25 | −79.5 | −65.0 |
| (14 fs/p) | 87.50 | −81.0 | −67.3 |
| Number of Harmonic | f(Hz) | Healthy Machine (dB) | Demagnetized Machine (dB) |
|---|---|---|---|
| (11 fs/p) | 68.75 | −77.0 | −59.5 |
| (12 fs/p) | 75.00 | −47.0 | −29.0 |
| (13 fs/p) | 81.25 | −73.5 | −65.0 |
| (14 fs/p) | 87.50 | −80.0 | −63.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lamprokostopoulos, A.; Mitronikas, E.; Barmpatza, A. Detection of Demagnetization Faults in Axial Flux Permanent-Magnet Synchronous Wind Generators. Energies 2022, 15, 3220. https://doi.org/10.3390/en15093220
Lamprokostopoulos A, Mitronikas E, Barmpatza A. Detection of Demagnetization Faults in Axial Flux Permanent-Magnet Synchronous Wind Generators. Energies. 2022; 15(9):3220. https://doi.org/10.3390/en15093220
Chicago/Turabian StyleLamprokostopoulos, Apostolos, Epameinondas Mitronikas, and Alexandra Barmpatza. 2022. "Detection of Demagnetization Faults in Axial Flux Permanent-Magnet Synchronous Wind Generators" Energies 15, no. 9: 3220. https://doi.org/10.3390/en15093220
APA StyleLamprokostopoulos, A., Mitronikas, E., & Barmpatza, A. (2022). Detection of Demagnetization Faults in Axial Flux Permanent-Magnet Synchronous Wind Generators. Energies, 15(9), 3220. https://doi.org/10.3390/en15093220