
Characterization of Sampled Value Streams in Non Real-Time Calibration Systems †



Abstract
:1. Introduction
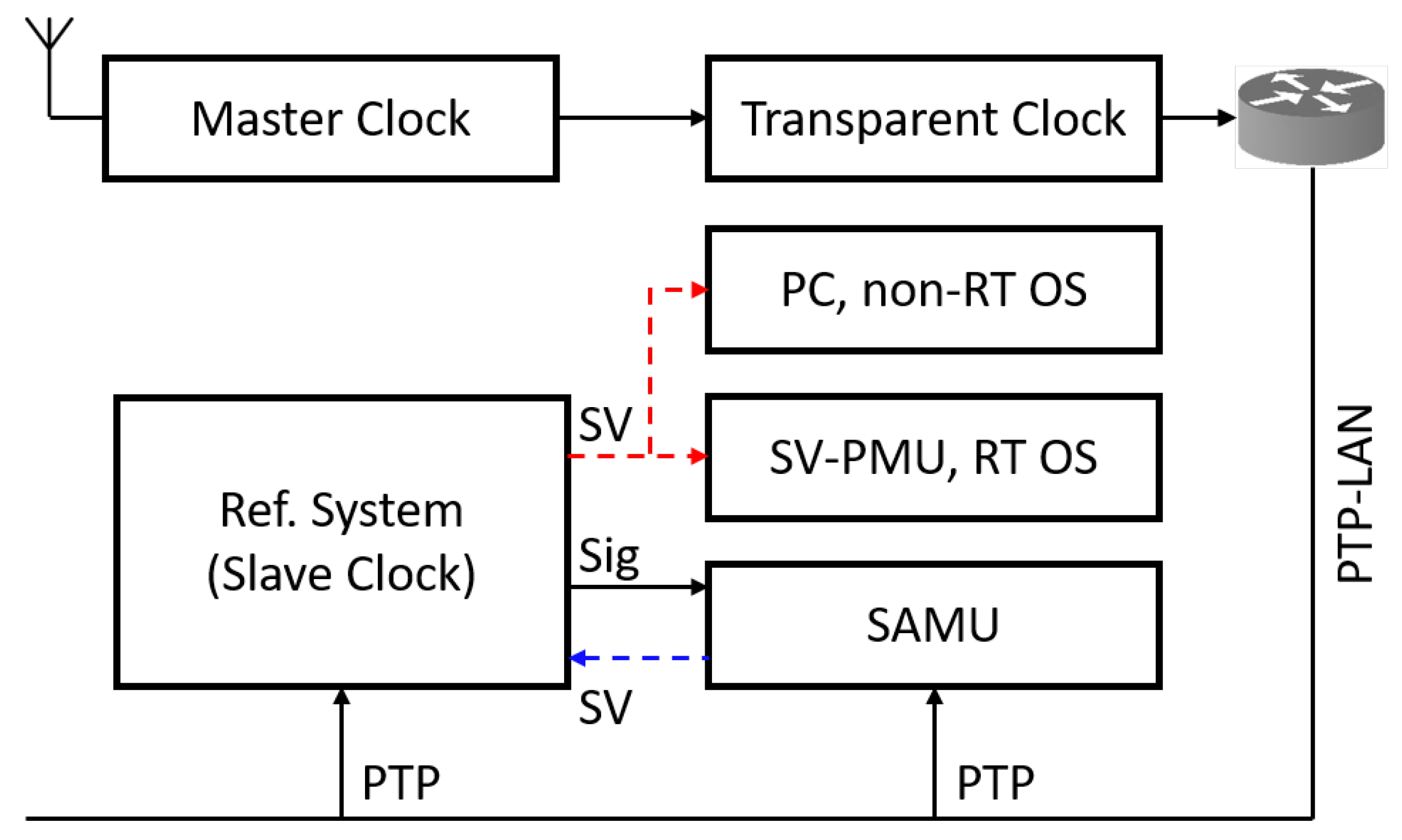
2. The IEC Std Calibrator
3. Implementation of SV Transmission
3.1. Encoding
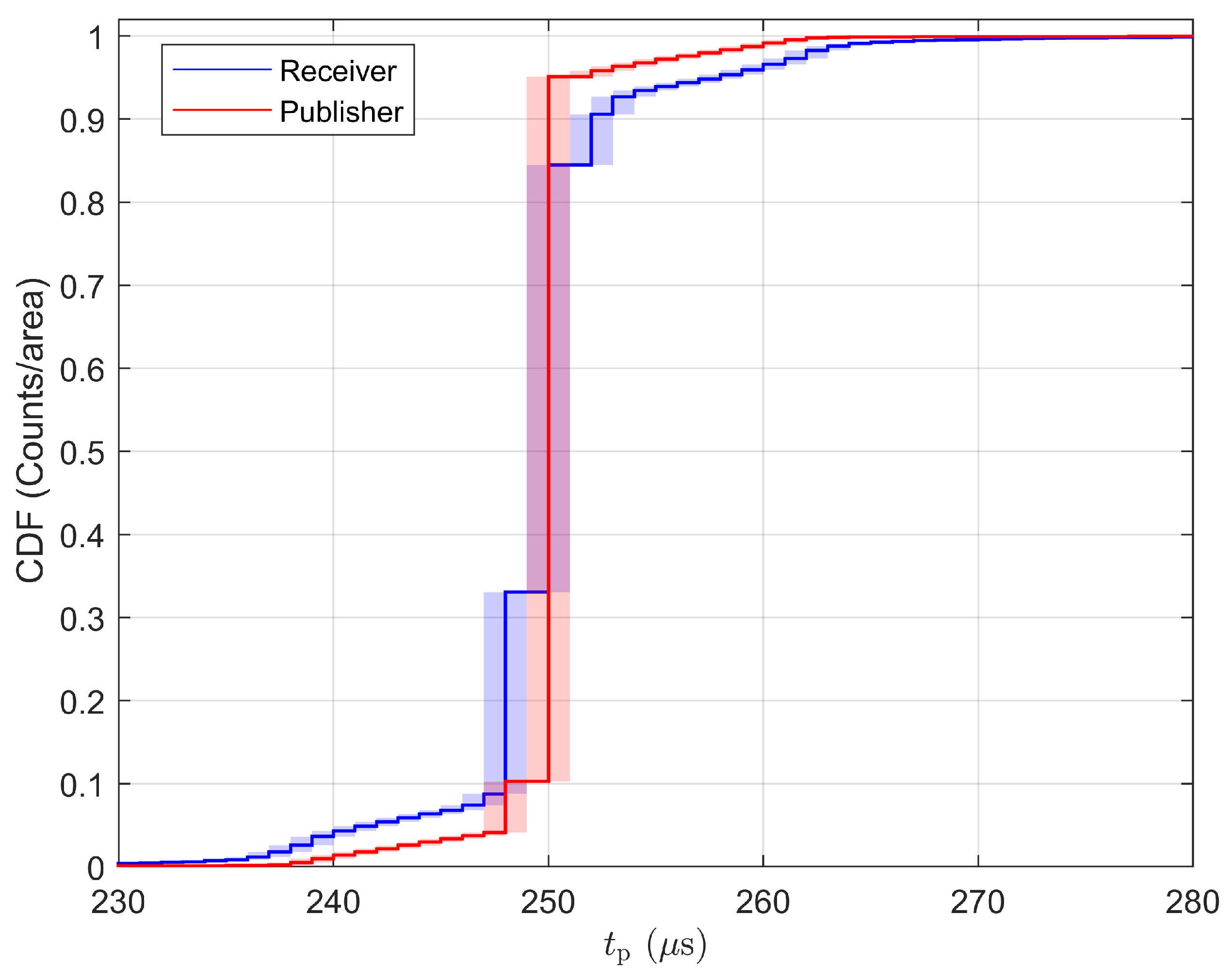
3.2. Packet Publishing Rate
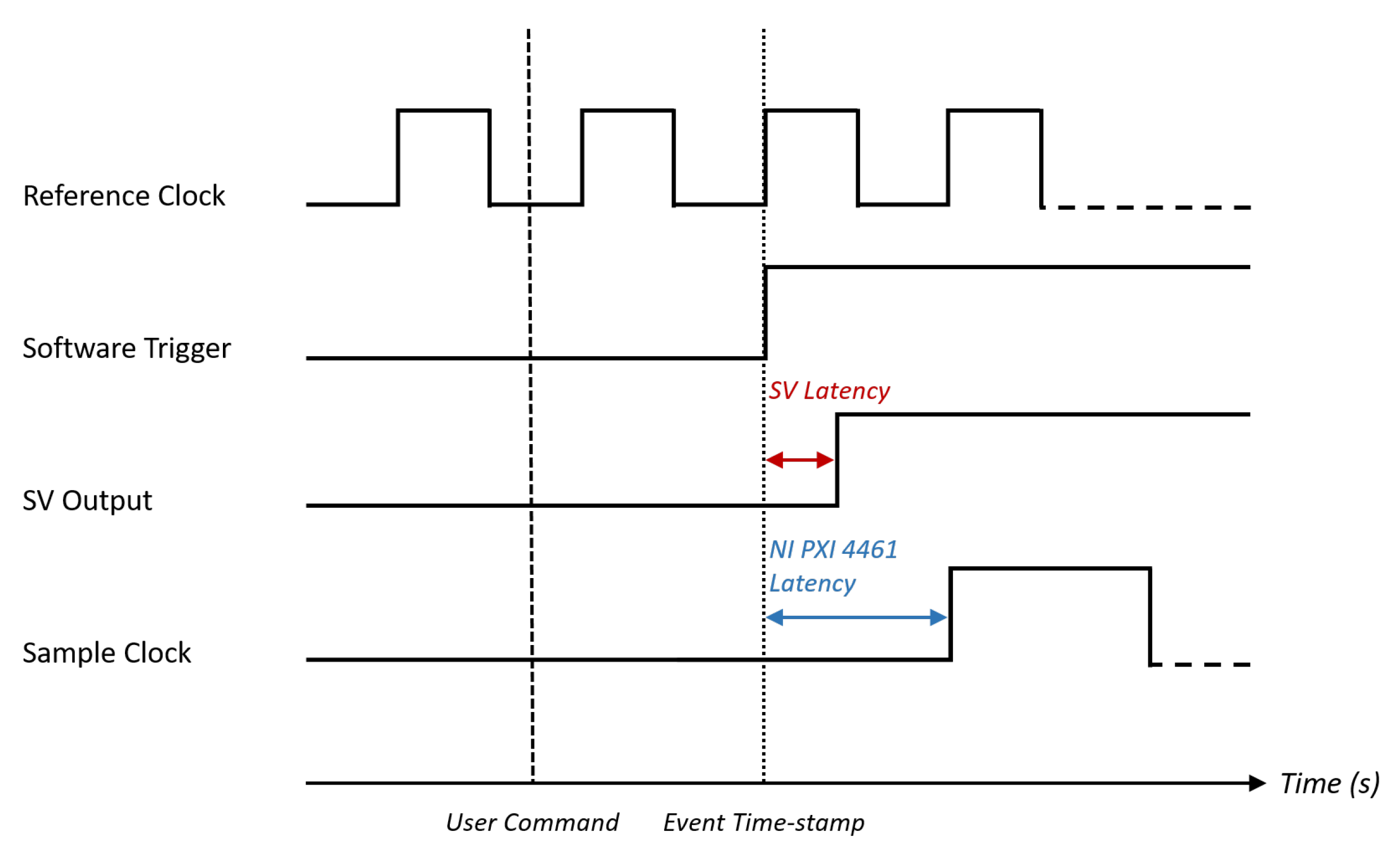
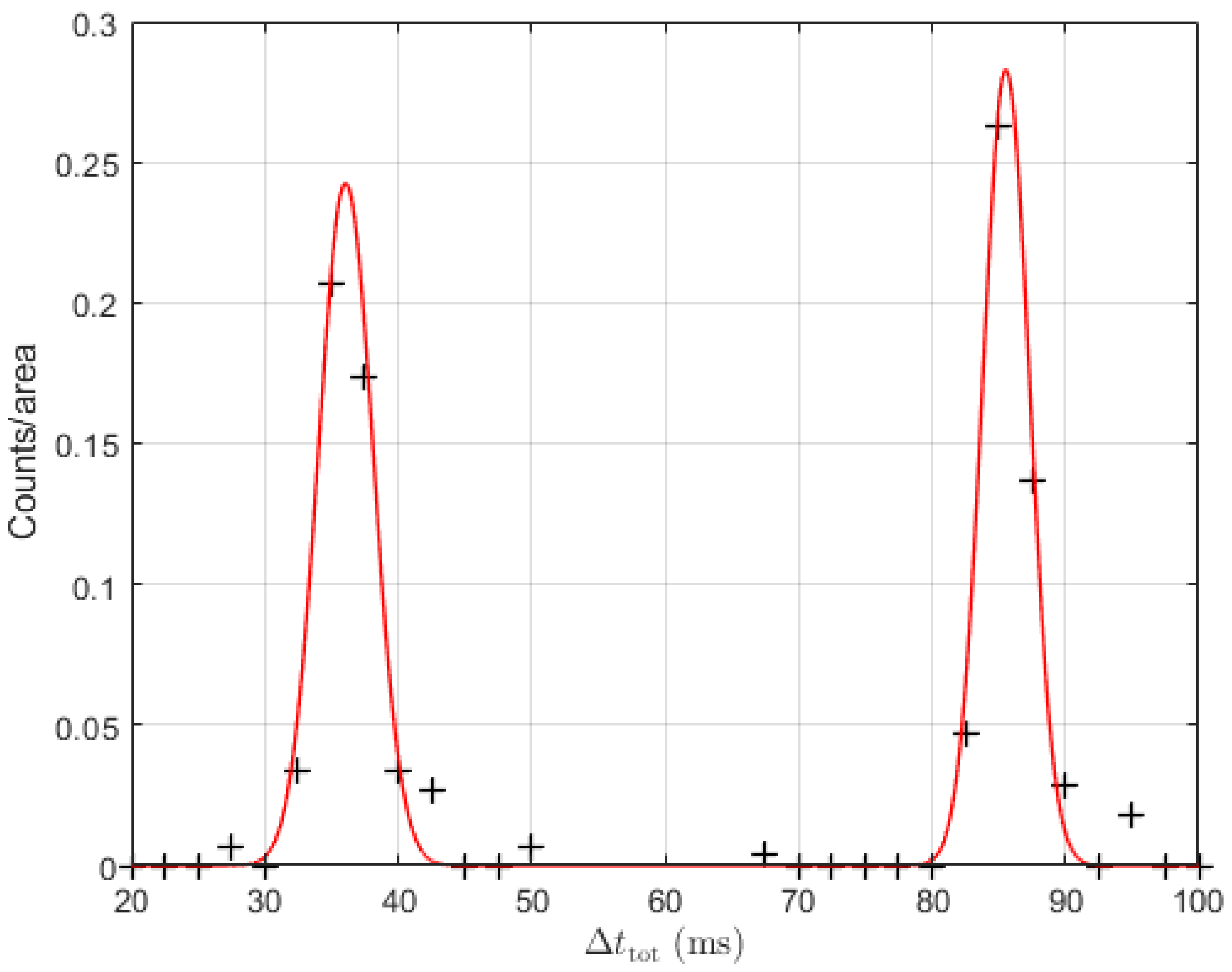
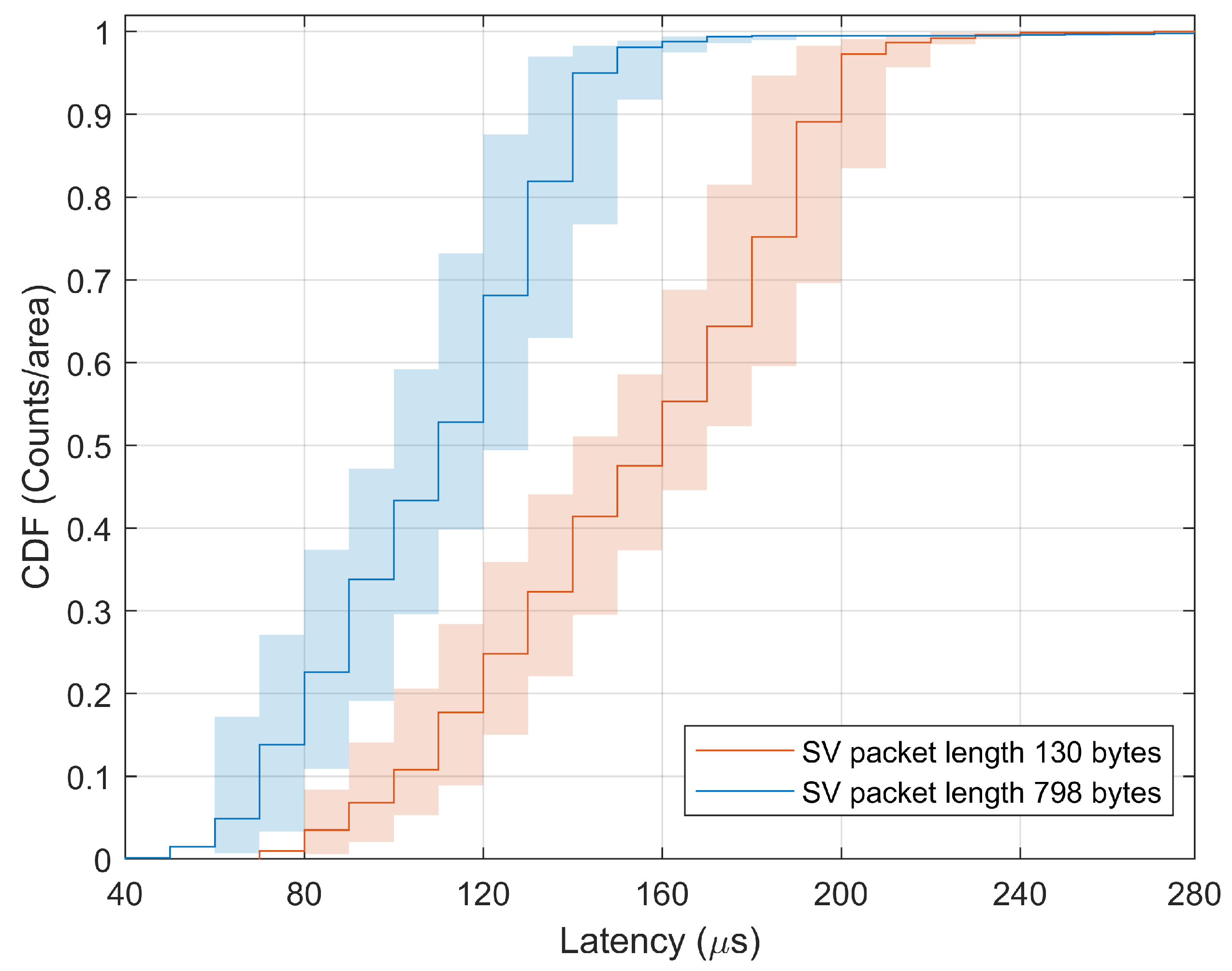
3.3. Transmission Latency
4. Reliability of Non-RT Measurements
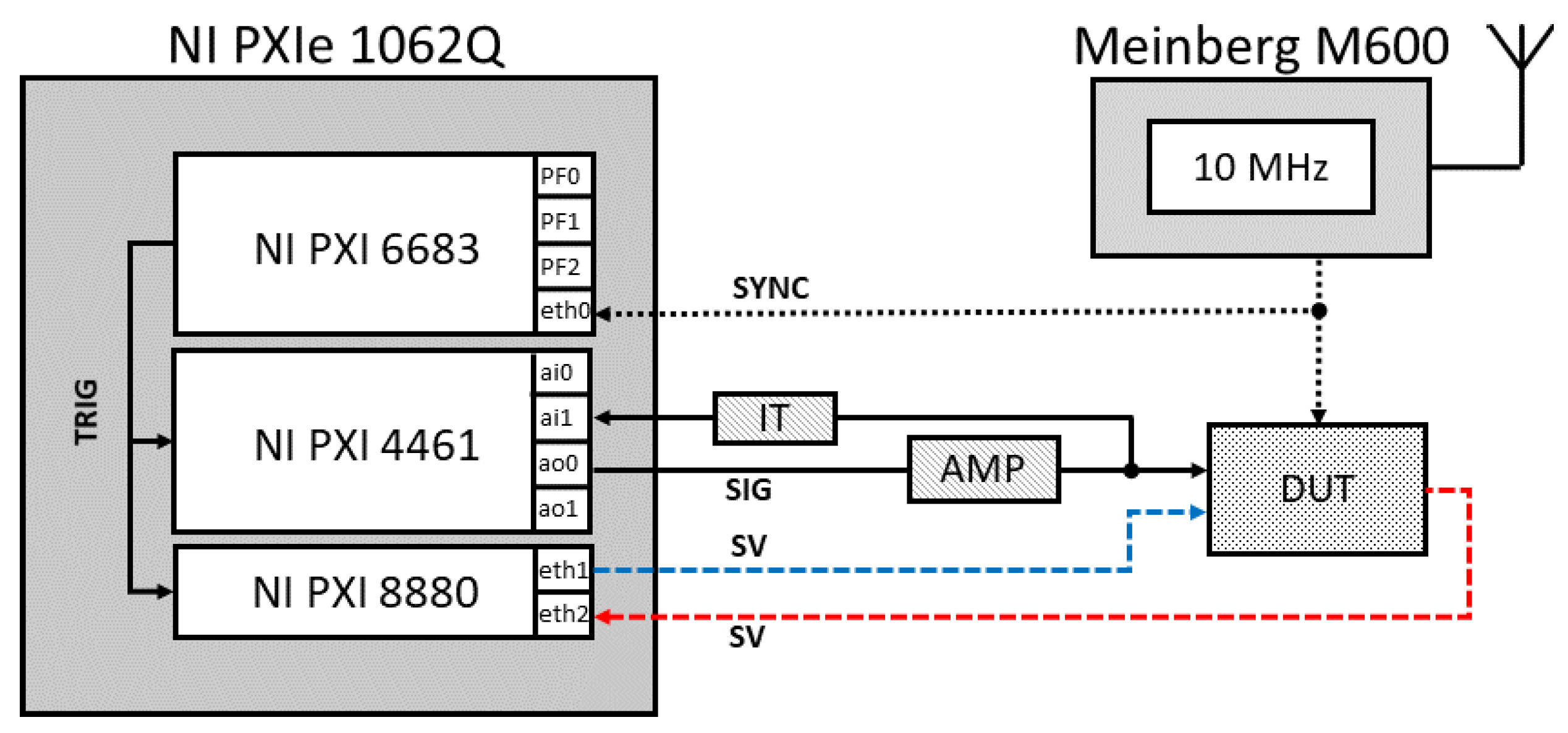
5. Experimental Tests
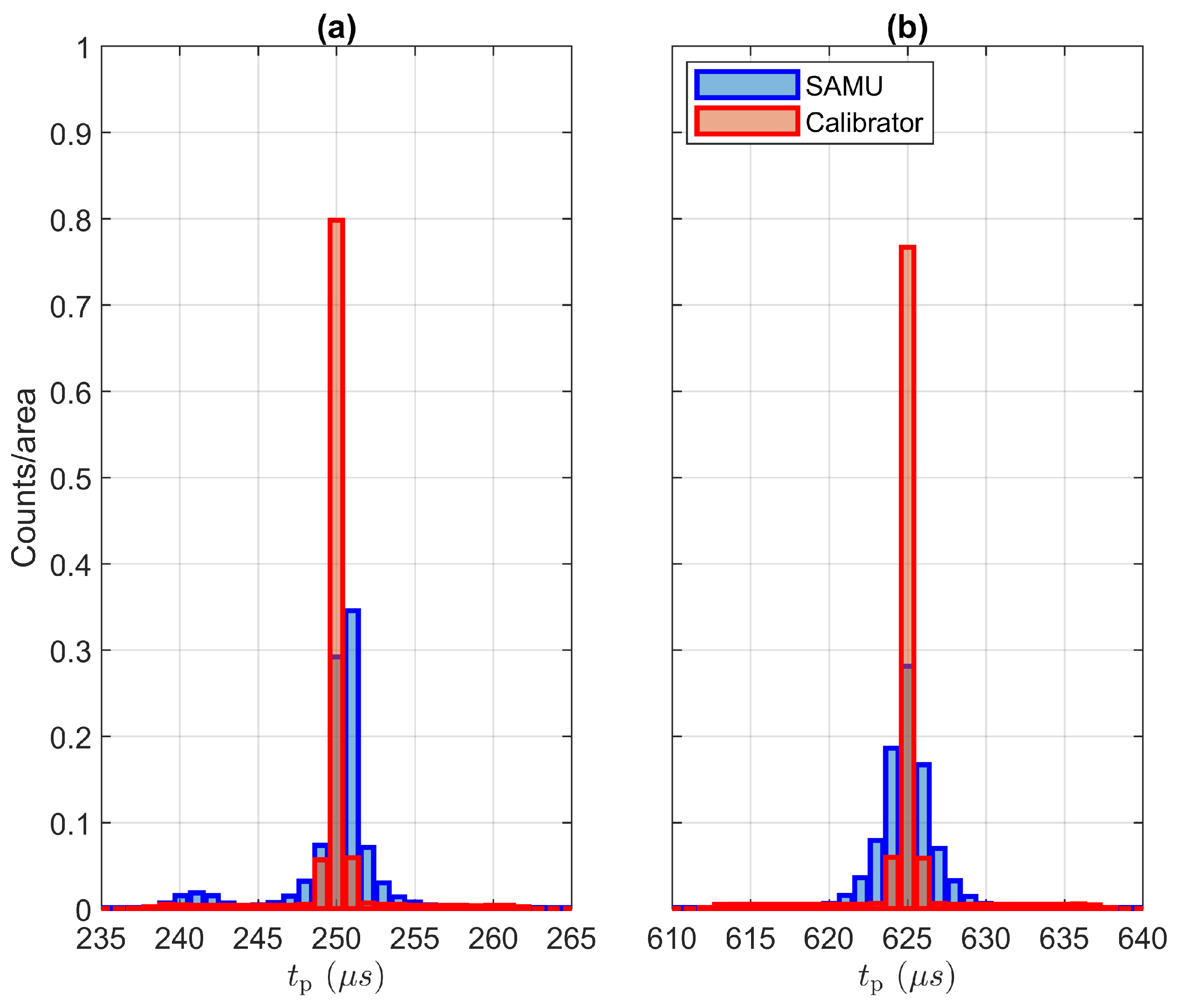
5.1. Publishing Rate Stability
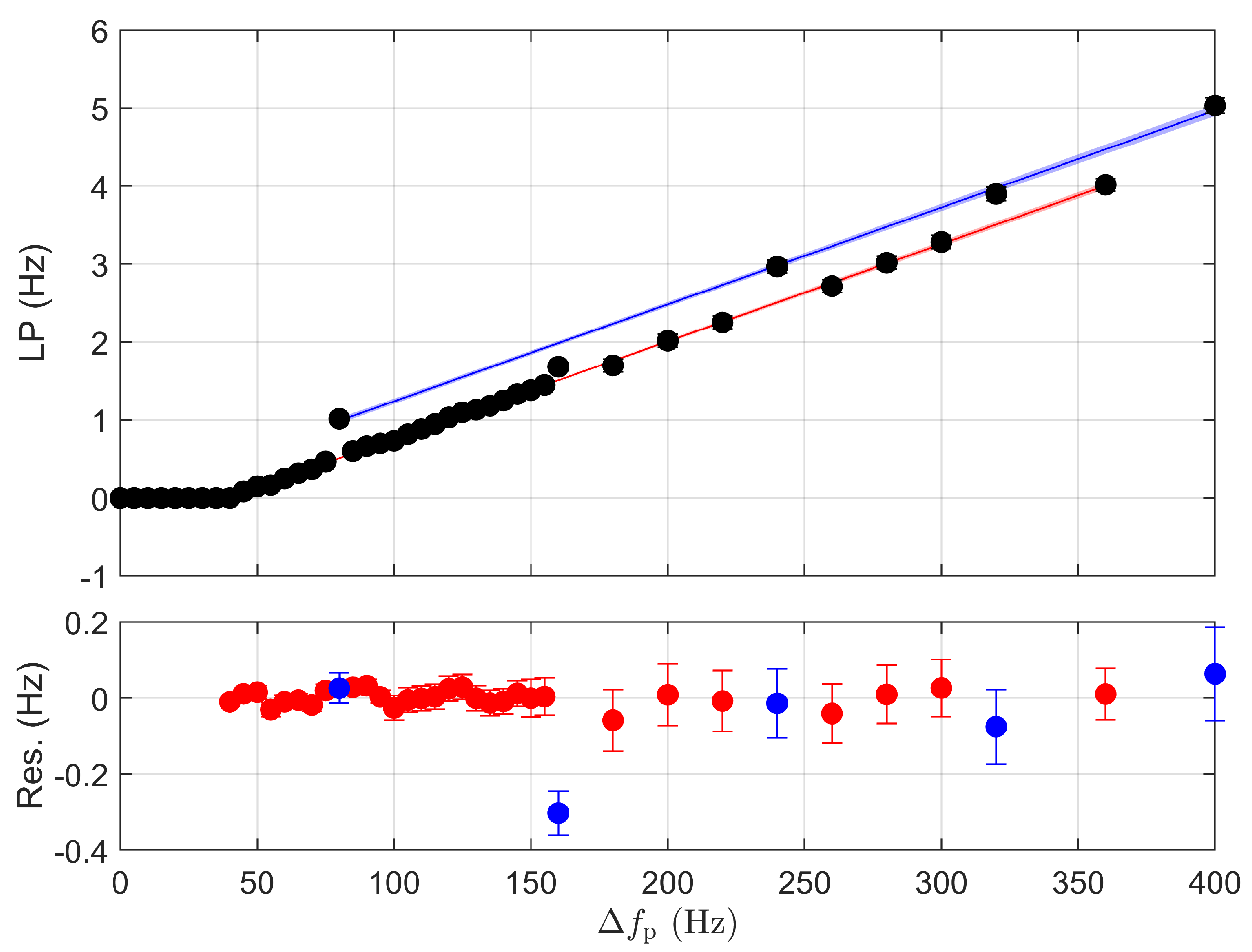
5.2. Publishing Rate Tolerance
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PMU | Phasor Measurement Unit |
| IED | Intelligent Electrical Device |
| SV | Sampled Value |
| SAMU | Stand Alone Merging Unit |
| NMI | National Metrology Institute |
| GPS | Global Positioning System |
| UTC | Coordinated Universal Time |
| dll | linked dynamic library |
| DUT | Device Under Test |
| SCD | System Configuration Description |
| APDU | Application Protocol Data Unit |
| ASDU | Application Service Data Unit |
| PPS | Pulse Per Second |
| PC | Personal Computer |
| PTP | Precision Time Protocol |
| CDF | Cumulative Distribution Function |
| RT | Real Time |
| OS | Operative System |
| NCIT | Non-Conventional Instrument Transformer |
References
- Liserre, M.; Sauter, T.; Hung, J.Y. Future Energy Systems: Integrating Renewable Energy Sources into the Smart Power Grid Through Industrial Electronics. IEEE Ind. Electron. Mag. 2010, 4, 18–37. [Google Scholar] [CrossRef]
- Borghetti, A.; Bosetti, M.; Grillo, S.; Massucco, S.; Nucci, C.A.; Paolone, M.; Silvestro, F. Short-Term Scheduling and Control of Active Distribution Systems with High Penetration of Renewable Resources. IEEE Syst. J. 2010, 4, 313–322. [Google Scholar] [CrossRef]
- Rietveld, G.; Braun, J.P.; Martin, R.; Wright, P.; Heins, W.; Ell, N.; Clarkson, P.; Zisky, N. Measurement Infrastructure to Support the Reliable Operation of Smart Electrical Grids. IEEE Trans. Instrum. Meas. 2015, 64, 1355–1363. [Google Scholar] [CrossRef]
- Frigo, G.; Derviškadić, A.; Zuo, Y.; Paolone, M. PMU-Based ROCOF Measurements: Uncertainty Limits and Metrological Significance in Power System Applications. IEEE Trans. Instrum. Meas. 2019, 68, 3810–3822. [Google Scholar] [CrossRef] [Green Version]
- Giustina, D.D.; Ferrari, P.; Flammini, A.; Rinaldi, S.; Sisinni, E. Automation of Distribution Grids with IEC 61850: A First Approach Using Broadband Power Line Communication. IEEE Trans. Instrum. Meas. 2013, 62, 2372–2383. [Google Scholar] [CrossRef]
- Castello, P.; Ferrari, P.; Flammini, A.; Muscas, C.; Pegoraro, P.A.; Rinaldi, S. A Distributed PMU for Electrical Substations with Wireless Redundant Process Bus. IEEE Trans. Instrum. Meas. 2015, 64, 1149–1157. [Google Scholar] [CrossRef]
- Cataliotti, A.; Cosentino, V.; Di Cara, D.; Guaiana, S.; Panzavecchia, N.; Tinè, G. A New Solution for Low-Voltage Distributed Generation Interface Protection System. IEEE Trans. Instrum. Meas. 2015, 64, 2086–2095. [Google Scholar] [CrossRef]
- Frigo, G.; Agustoni, M. Phasor Measurement Unit and Sampled Values: Measurement and Implementation Challenges. In Proceedings of the 2021 IEEE 11th International Workshop on Applied Measurements for Power Systems (AMPS), Cagliari, Italy, 29 September–1 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- IEC/IEEE 61850:2021 Edition 1.0 2021-06; IEC/IEEE International Standard-Communication Networks and Systems for Power Utility Automation—Part 1: Introduction and Overview. IEEE: Piscataway, NJ, USA, 2021; pp. 1–6707.
- IEEE Std 2030.100-2017; IEEE Recommended Practice for Implementing an IEC 61850-Based Substation Communications, Protection, Monitoring, and Control System. IEEE: Piscataway, NJ, USA, 2017; pp. 1–67. [CrossRef]
- IEC 61850-9-2:2011+AMD1:2020 CSV Edition 2.1 2020-02; IEC/IEEE International Standard-Communication Networks and Systems for Power Utility Automation-Part 9-2: Specific Communication Service Mapping (SCSM)-Sampled Values over ISO/IEC 8802-3. IEEE: Piscataway, NJ, USA, 2020; pp. 1–34.
- Higgins, N.; Vyatkin, V.; Nair, N.K.C.; Schwarz, K. Distributed Power System Automation with IEC 61850, IEC 61499, and Intelligent Control. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2011, 41, 81–92. [Google Scholar] [CrossRef]
- Agustoni, M.; Mortara, A. A Calibration Setup for IEC 61850-9-2 Devices. IEEE Trans. Instrum. Meas. 2017, 66, 1124–1130. [Google Scholar] [CrossRef]
- Lehtonen, T.; Hällström, J. A reference merging unit and calibration setup for sampled values over Ethernet. In Proceedings of the 2016 Conference on Precision Electromagnetic Measurements (CPEM 2016), Ottawa, ON, Canada, 10–15 July 2016; pp. 1–2. [Google Scholar] [CrossRef]
- Mohns, E.; Mortara, A.; Cayci, H.; Houtzager, E.; Fricke, S.; Agustoni, M.; Ayhan, B. Calibration of Commercial Test Sets for Non-Conventional Instrument Transformers. In Proceedings of the 2017 IEEE International Workshop on Applied Measurements for Power Systems (AMPS), Liverpool, UK, 20–22 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Frigo, G.; Agustoni, M. Calibration of a Digital Current Transformer Measuring Bridge: Metrological Challenges and Uncertainty Contributions. Metrology 2021, 1, 93–106. [Google Scholar] [CrossRef]
- Agustoni, M.; Frigo, G. Characterization of DAC Phase Offset in IEC 61850-9-2 Calibration Systems. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- IEC/IEEE 60255-118-1 Edition 1.0 2018-12; IEC/IEEE International Standard-Measuring Relays and Protection Equipment—Part 118-1: Synchrophasor for Power Systems—Measurements. IEEE: Piscataway, NJ, USA, 2018; pp. 1–78.
- IEC 61869-9 Edition 1.0 2016-04; IEC International Standard-Instrument Transformers-Part 9: Digital Interface for Instrument Transformers. IEC: Geneva, Switzerland, 2016; pp. 1–132.
- Lombardi, M. The Use of GPS Disciplined Oscillators as Primary Frequency Standards for Calibration and Metrology Laboratories. NCSLI Meas. 2008, 3, 56–65. [Google Scholar] [CrossRef]
- Blair, S.M.; Coffele, F.; Booth, C.D.; Burt, G.M. An Open Platform for Rapid-Prototyping Protection and Control Schemes with IEC 61850. IEEE Trans. Power Deliv. 2013, 28, 1103–1110. [Google Scholar] [CrossRef] [Green Version]
- IEC 61850-6:2009+AMD1:2018 CSV Consolidated Version; IEC/IEEE International Standard-Communication Networks and Systems for Power Utility Automation-Part 6: Configuration Description Language for Communication in Power Utility Automation Systems Related to IEDs. IEC: Geneva, Switzerland, 2018; p. 269.
- UCA International User Group. Implementation Guideline for Digital Interface to Instrument Transformers Using IEC 61850-9-2; Technical Report; UCA International User Group: Raleigh, UC, USA, 2004. [Google Scholar]
- Risso, F.; Degioanni, L. An architecture for high performance network analysis. In Proceedings of the Sixth IEEE Symposium on Computers and Communications, Hammamet, Tunisia, 5 July 2001; pp. 686–693. [Google Scholar] [CrossRef] [Green Version]
- Jacobson, V.; Leres, C.; McCanne, S. libpcap Lawrence Berkeley Laboratory Berkeley CA. Initial Public Release. 1994. Available online: http://www.tcpdump.org/ (accessed on 10 June 2021).
- WinPcap User’s Manual. WinPcap Documentation. 2018. Available online: http://www.winpcap.org/docs/docs_412/html/group__wpcap.html (accessed on 10 June 2021).
- IEEE Std 1588-2019 (Revision ofIEEE Std 1588-2008); IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems. IEEE: Piscataway, NJ, USA, 2020; pp. 1–499. [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| f (Hz) | (Sa/cyc.) | () | () | () | () |
|---|---|---|---|---|---|
| 50 | 80 | 250 | −83.2 | 19.3 | −3.2 |
| 60 | 80 | 208.3 | 22.1 | 39.8 | −2.9 |
| 50 | 256 | 625 | −309.8 | 39.3 | −9.8 |
| 60 | 256 | 520.8 | 16.2 | 50.5 | 1.2 |
| Mean (μs) | Std Dev (μs) | 95% Perc (μs) | |
|---|---|---|---|
| Publisher | 249.98 | 3.53 | 250.98 |
| Receiver | 249.97 | 5.57 | 256.50 |
| Source | ) | Mean (μs) | Std Dev (μs) | OS |
|---|---|---|---|---|
| SAMU | 250 | 250.1 | 5.2 | Windows |
| 249.6 | 7.7 | Linux RT | ||
| 625 | 624.9 | 10.0 | Windows | |
| 625.2 | 10.3 | Linux RT | ||
| Calibrator | 250 | 249.9 | 3.4 | Windows |
| 249.4 | 5.5 | Linux RT | ||
| 625 | 624.9 | 7.9 | Windows | |
| 624.7 | 8.2 | Linux RT |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Agustoni, M.; Frigo, G. Characterization of Sampled Value Streams in Non Real-Time Calibration Systems. Energies 2022, 15, 3245. https://doi.org/10.3390/en15093245
Agustoni M, Frigo G. Characterization of Sampled Value Streams in Non Real-Time Calibration Systems. Energies. 2022; 15(9):3245. https://doi.org/10.3390/en15093245
Chicago/Turabian StyleAgustoni, Marco, and Guglielmo Frigo. 2022. "Characterization of Sampled Value Streams in Non Real-Time Calibration Systems" Energies 15, no. 9: 3245. https://doi.org/10.3390/en15093245
APA StyleAgustoni, M., & Frigo, G. (2022). Characterization of Sampled Value Streams in Non Real-Time Calibration Systems. Energies, 15(9), 3245. https://doi.org/10.3390/en15093245