1. Introduction
In an integrated power system having several control zones, power system engineers are primarily concerned with maintaining frequency and voltage levels close to optimal operating conditions. By balancing load demand with generation and related losses, a well-maintained power system is supposed to provide uninterrupted, high-quality power to its customers. In a real-time situation, the load changes continuously, so there exist fluctuations in frequency and voltage. To keep these variations within acceptable limits, each generator needs two control loops: an automatic generation control (AGC) and an automatic voltage regulator (AVR) [
1,
2].
Frequency and voltage oscillations may become more pronounced and even cause system instability due to the lack of inertia in photovoltaic (PV) systems. Due to the depletion of traditional energy sources, rising fuel costs, and environmental warming conditions, incorporating renewable energy sources (RES) is increasing in the current fossil fuel-based power system. As a substitute to traditional fossil fuels, RES, such as wind power generation (WPG) and solar photovoltaic (SPV) generation, have captured the interest of researchers [
1,
3,
4,
5].
The controlling of the renewable energy sources is challenging since they strongly depend on climate factors. To overcome this issue, storage devices, such as SMES, flywheels, and batteries, can be used in combination with RES to improve grid stability and frequency fluctuations [
2,
5]. At times of high demand from the grid, these devices release their stored energy. At the same time, non-petroleum-dependent alternatives such as electric vehicles (EVs) are growing in favor as eco-friendly alternatives to traditional gasoline automobiles that can contribute to a greener future.
These EVs have the potential to serve as energy storage devices that aid in frequency regulation as a source during the times of high demand [
1]. To address the AGC issue, a few research studies have been conducted on EV penetration [
6,
7,
8,
9,
10]. Authors in [
6,
7] analyzed the effect of EV and communication delay on isolated power systems. Utilizing EV for AGC accentuates the reorganized power market [
8]. However, research on EV integration for combined AGC and AVR is in its infancy and requires attention [
11].
The superconducting magnetic energy storage (SMES) technology can manage both real and reactive power requirements. The SMES system functions as energy-compensating equipment for larger loads and therefore controls frequency oscillations [
2,
12]. The SMES action is faster than the primary control mechanism of the governor [
12]. Frequently charging and discharging of a battery system to handle power system fluctuations reduces its lifespan and performance. The SMES technology is preferable over battery systems [
12,
13,
14]. However, the superiority of the SMES system in managing the active and reactive powers together having solar PV, wind, geothermal, and thermal power plants is yet to be determined in the presence of a cascaded controller.
Flexible AC transmission system (FACTS) devices enhance the power system’s transfer capacity and stability. Series FACTS devices, such as the thyristor-controlled series capacitor (TCSC), the static synchronous series compensator (SSSC), the thyristor-controlled phase shifter (TCPS), the interline power flow controller (IPFC), and the gate-controlled series capacitor (GCSC), demonstrate their efficacy in managing the tie-line powers in AGC [
15,
16]. Among all FACTS devices, the GCSC has recently captured the attention researchers in AGC studies due to its numerous benefits [
16]. The GCSC has a smaller capacitor size, lower cost, and stronger compensating capabilities than the TCSC. The GCSC is simpler and more cost-effective than the TCPS and SSSC [
17,
18]. References [
13,
14] have studied the coordination of SMES-TCSC and SMES-SSSC; however, the coordination of SMES with GCSC is not found in the literature addressing combined AGC and AVR loop problems.
In order to regulate the frequency and voltage fluctuations in AGC and AVR loops, suitable controllers are required. Various integer order controllers [
2,
3,
19] and proportional integral derivative (PID) controllers [
1,
2,
11,
20,
21,
22] have been used in the past to solve AGC and AVR difficulties in literature. Because of its low price, ease of use, and reliability in practice, the PID controller is mostly used in the literature. However, it fails when applied to systems with non-minimum phase [
1,
11,
23,
24]. Later, the fractional order PID (FOPID) controllers were successfully implemented to address the AGC and/or AVR [
25,
26] and demonstrated their superiority over integer order controllers because of their extra knobs for flexible control action. Recently, studies have focused on the cascade control arrangement (CCA) in relation to AGC and/or AVR difficulties [
19]. The CCA adds a sensor that helps in reducing the disturbance before it affects the output of the plant.
To improve the performance of a controller, its parameters must be optimally optimized using appropriate metaheuristic algorithms. Shukla et al. [
1] used the particle swarm optimization (PSO) algorithm to obtain gains of PID and TID controllers. The authors of [
2,
20] used a hybrid algorithm of artificial electric field to get the variables of PID controller. The authors of [
3] applied gradient-based optimization (GBO) to optimized integral order controllers. Ramoji and Saikia in [
11,
23,
24] utilized Harris hawks optimization (HHO) in their work. The PSO technique has a tendency to fall into a local optimum in a larger dimensional search space with slow convergence nature [
27]. The HHO suffers from the drawbacks such as population diversity and local optima [
28].
Inspired by the actions of birds with the same name, a new metaheuristic algorithm called the coot algorithm (CA) was presented recently by Naruei and Keynia [
29]. In addition to tackling real-world optimization issues like the design of a pressure spring tension, their analysis demonstrates that the CA outperforms most other optimization methods, suggesting that it be investigated further when creating a controller for the combined AGC and AVR issue. The CA successfully applied to address the unimodal and multimodal test functions. The CA proved its efficiency in solving the problems that have unknown search spaces.
The field of AGC and AVR investigations has the following limitations, according to a careful examination of the literature.
The AGC and AVR loops control with the utilization of cascaded PID-FOPID controllers tuned by coot technique has not yet been observed.
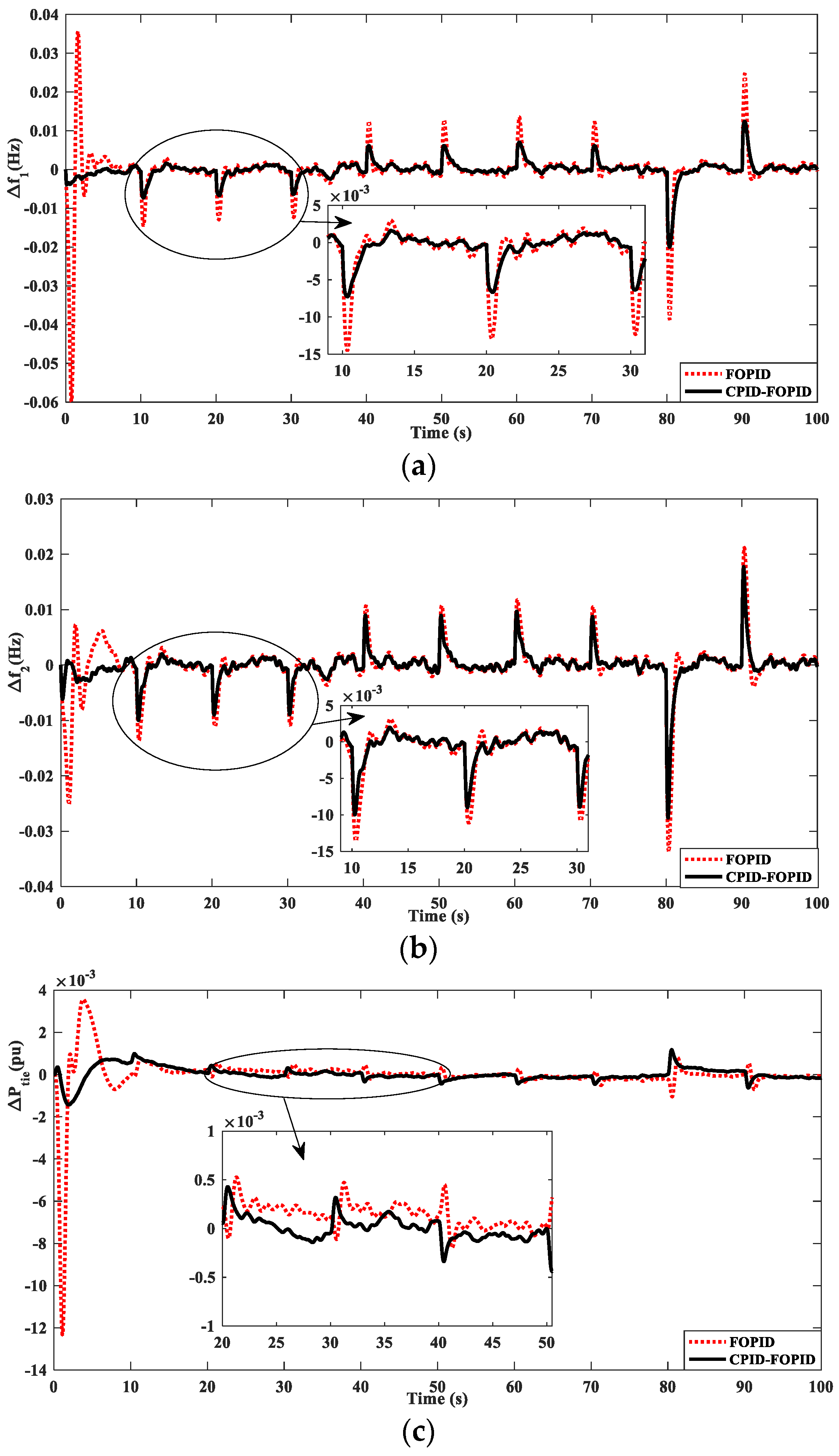
The investigations showing the comparative behaviors of cascaded PID-FOPID, FOPID, and PID controllers is not found for the system comprising renewable energy sources and electric vehicles.
The coordinated performance of GCSC and SMES in regulating frequency and voltage with the cascade PID-FOPID controller is not known.
Further research is needed on the time-delay effect on the combined AGC and AVR system performance in the presence of a coot-based cascaded PID-FOPID.
The above limitations encourage the authors to investigate them in the present research for combined AGC and AVR issue. Based on the limitations found in the literature review, the following are the novel contributions of this research:
To examine the comparative performance of cascaded PID-FOPID controllers with PID and FOPID controllers to evaluate the superiority of the proposed controller when optimized with the coot technique.
To demonstrate the efficiency of a cascaded PID-FOPID controller over FOPID random disturbances and variable solar and wind input.
To examine the optimal configuration for the application of GCSC and SMES coordination to the combined AGC and AVR problem by comparing SMES-SMES, GCSC, and SMES-GCSC-SMES coordination strategies.
To investigate the impact of communication delay on frequency and voltage profile in the presence of a cascaded PID-FOPID controller and to suggest a suitable delay margin for the considered interconnected system.
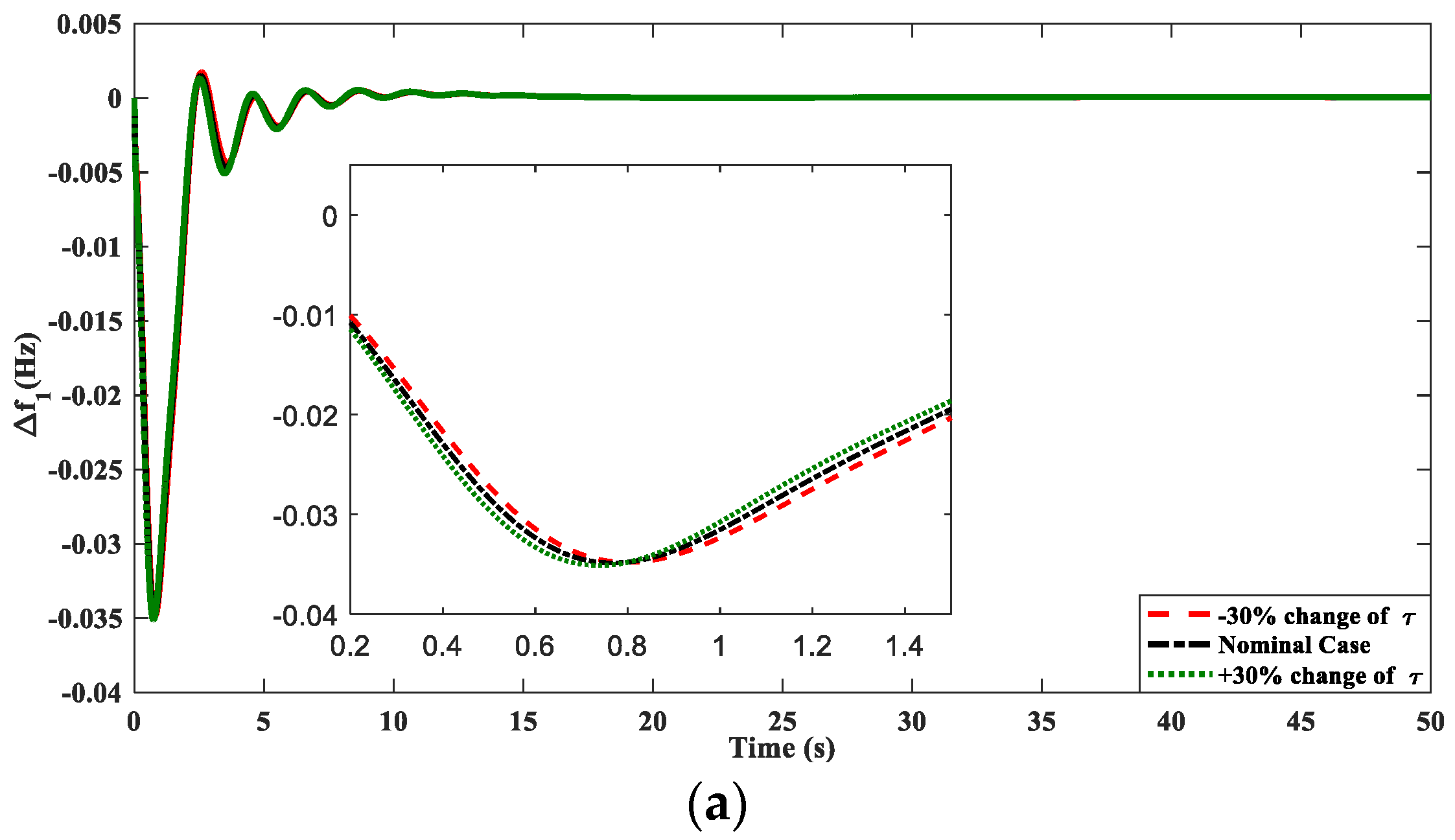
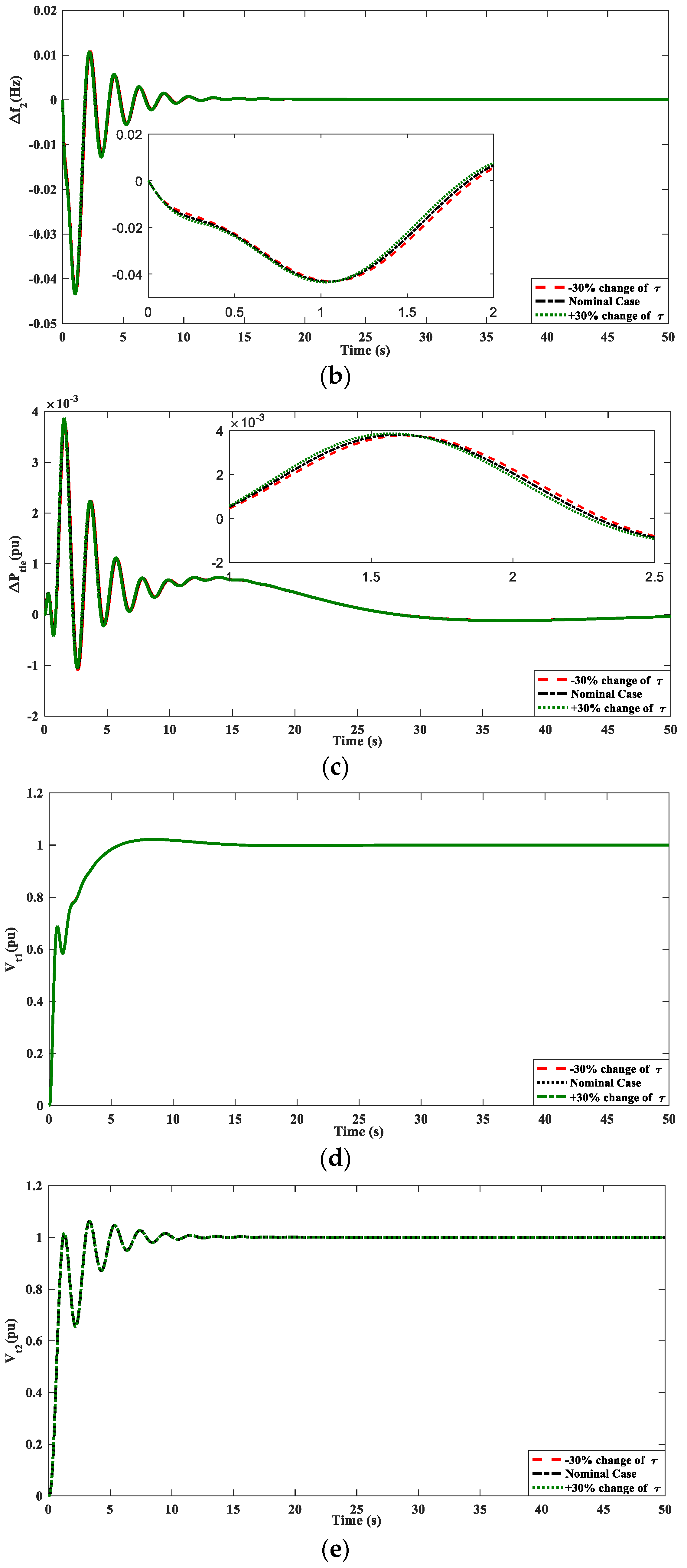
To validate the stability of CA-based cascaded PID-FOPID controllers against fluctuations in turbine time constants of thermal and geothermal power plants.
To validate simulation findings using an OPAL-RT 4510 real-time digital simulator.
For the benefit of the reader, a schematic overview of different sources utilized is presented in
Figure 1, namely, the reheat thermal power plant (RTPP), geothermal power plant (GTPP), solar thermal power plant (STPP), solar photovoltaic (SPV), and wind turbine generation (WTG) along with electric vehicles. The control system represented in the figure acts as control center. The power and communication networks are also highlighted. Various kinds of power system elements, such as loads and SMES, are also depicted.
Table 1 highlights the comparative analysis of previously published articles, including the current manuscript.
The individual segments of this work are structured as follows.
Section 2 describes the power systems under investigation.
Section 3 discusses the proposed CPID-FOPID controller structure used for frequency and voltage regulation. The coot technique is explained in
Section 4.
Section 5 discusses the findings for all test systems, along with OPAL-RT validation of the collected results. Finally, the conclusions and recommendations for further study are offered in
Section 6.
2. System Investigated
An interconnected two-area power system is taken for investigation having equal sources in both the areas. Small signal analysis is done in this study; thus, the power system’s transfer function-based model is represented in
Figure 2a,b. The considered system has the following sources in each area: a reheat thermal power plant (RTPP) [
1,
2], a geothermal power plant (GTPP) [
19], and a solar thermal power plant (STPP) [
24]. From the renewable energy source (RES), solar photovoltaic (SPV) [
1] and wind turbine generation (WTG) [
1] are connected in both the areas along with electric vehicles (EVs) [
8,
9]. All the gain and time constants of the above discussed sources are mentioned in the
Appendix A. The system under study is considered an equal area capacity ratio, i.e., 10,000 MW in each area. To make the realistic approach, the system is also incorporated with non-linearities of the reheat turbine, GRC (
Figure 2c), and communication time delay. The authors also study the combined coordination effect of FACTS (GCSC) and storage devices (SMES).
The application of electric vehicles (EVs) is considered in vehicle to gride (V2G) mode. The EVs are comparable to energy storage devices, such as batteries, that may contribute to frequency control [
8,
9,
10]. A single electric vehicle can produce up to 20 kW [
8,
9]. Therefore, an EV aggregator is required for AGC and AVR problems that typically include MW-range capacities. EVs often include a dynamic model of an EV aggregator, a time delay, a dead band, and regulating capacity [
8,
9] (
Figure 2d). The maximum and minimum output powers of the EV aggregator are denoted as
and
, which are related to incremental generation change (∆
PEV) in any area, as shown in Equation (1).
where
NEV is the total number of electric vehicles connected to the grid. This study assumed that each EV has the ∆
PEV of 5 kW, and there are 8000 numbers of such EVs connected in each area.
3. Controller Structure
To find out the solution of the two-area combined AGC and AVR issue, a cascaded controller is utilized. The primary purpose of the cascaded controller is to improve the disturbance rejection for multi-loop issues like frequency regulation [
19]. The two controllers in this setup, designated as
C1(
s) and
C2(
s), are referred to as the master (
M) and slave (
S) controllers, respectively. The control mechanism for the cascade is depicted in
Figure 3a, along with
C1(
s) and
C2(
s).
Area control error (
ACE) refers to the error reported to the controller. When system loading changes, frequency, and tie-line powers diverge from their nominal or scheduled values, it is undesirable and can lead to power system failure. Continuous monitoring between load demand and generation in AGC reduces
ACE. The
ACE is a linear combination of frequency and tie-line power variations (Equations (2) and (3)).
The β1 and β2 are frequency response characteristics, which are the same as the frequency bias constant (Bi); Δf1 and Δf2 are the deviation in area frequency; ΔPtie and a12 are deviation in tie-line power flow and area rating ratio, respectively.
The fractional order is governed by the generalized integer order calculus. This presents the most frequently used integrators and Reimann–Liouville (RL) fractional derivatives in Equations (4) and (5).
The terms a, t, , and denote initial time instance, final time instance, differential fractional operator, and Euler’s gamma function, respectively. The “q” takes the integer values whose rage is q − 1 ≤ α ≤ q.
Specifically, the transfer functions of a cascade combination of PID-FOPID controller is shown in
Figure 3b.
The terms and are the master and slave controllers, respectively, with their derivative, integral, and proportional gains representing , , and in area w and corresponding integral and derivative powers of λ and µ, respectively.
Finding a solution within the feasible zone is the goal of optimization problems, which are solved by limiting some objective function chosen for the system. The integral time absolute error (
ITAE) criterion, as shown in Equation (8), is used as the objective function for the combined AGC and AVR problem under investigation.
where Δ
fw, Δ
Vw, and Δ
Ptie are the fluctuations in frequency, voltage, and transmission lines, respectively. The terms
t and
T denote time instance and simulation durations, respectively.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}