
A Review on Analysis Methods and Research Status of Hysteresis Motor


Abstract
:1. Introduction
2. Traditional Hysteresis Motor
2.1. Development History
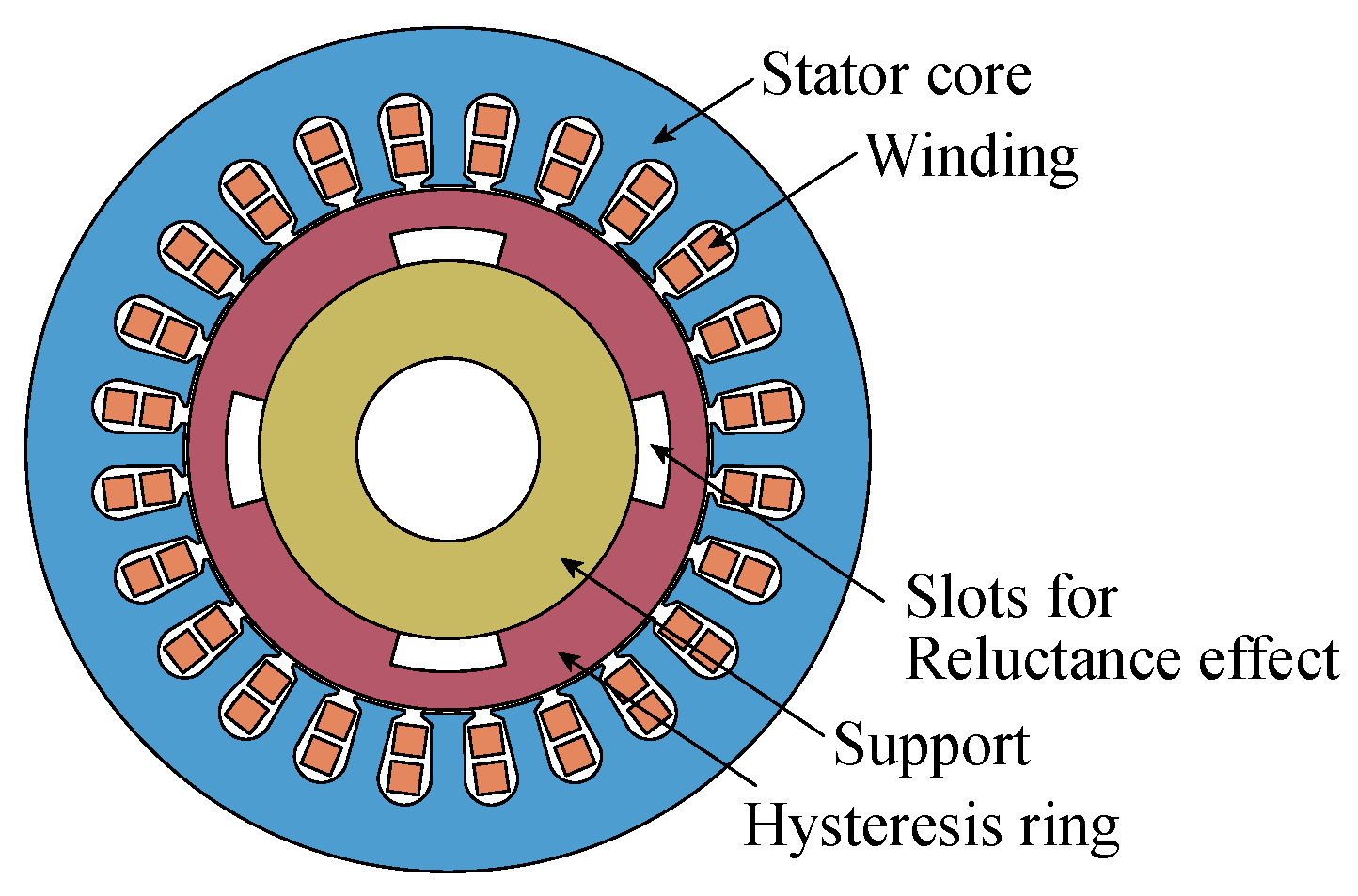
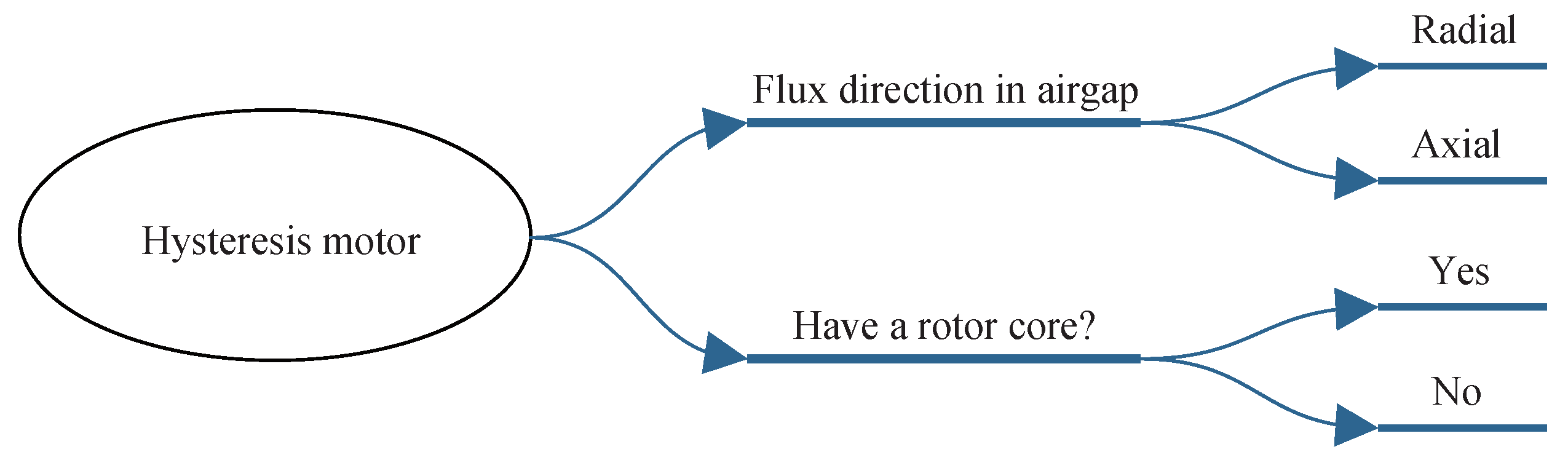
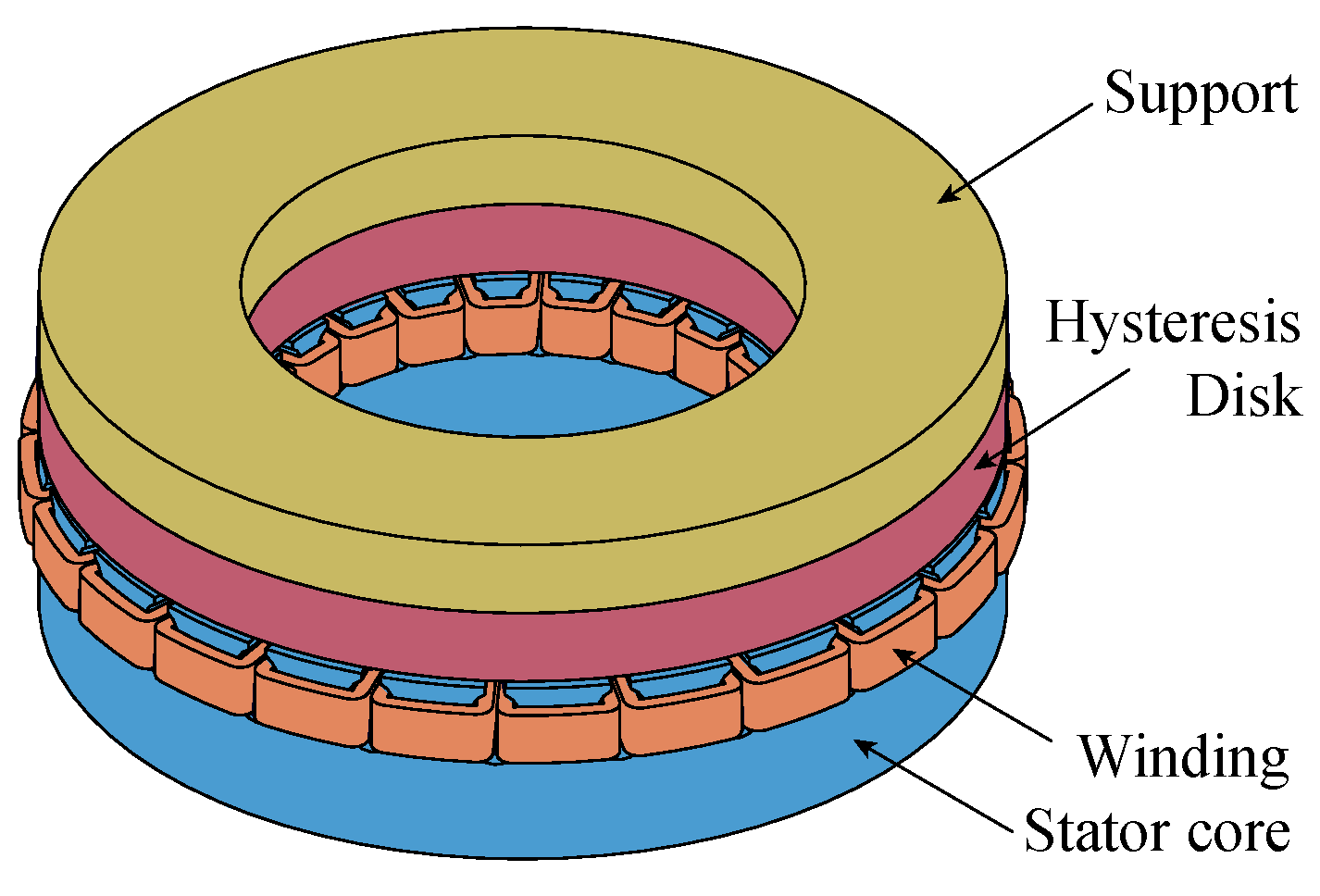
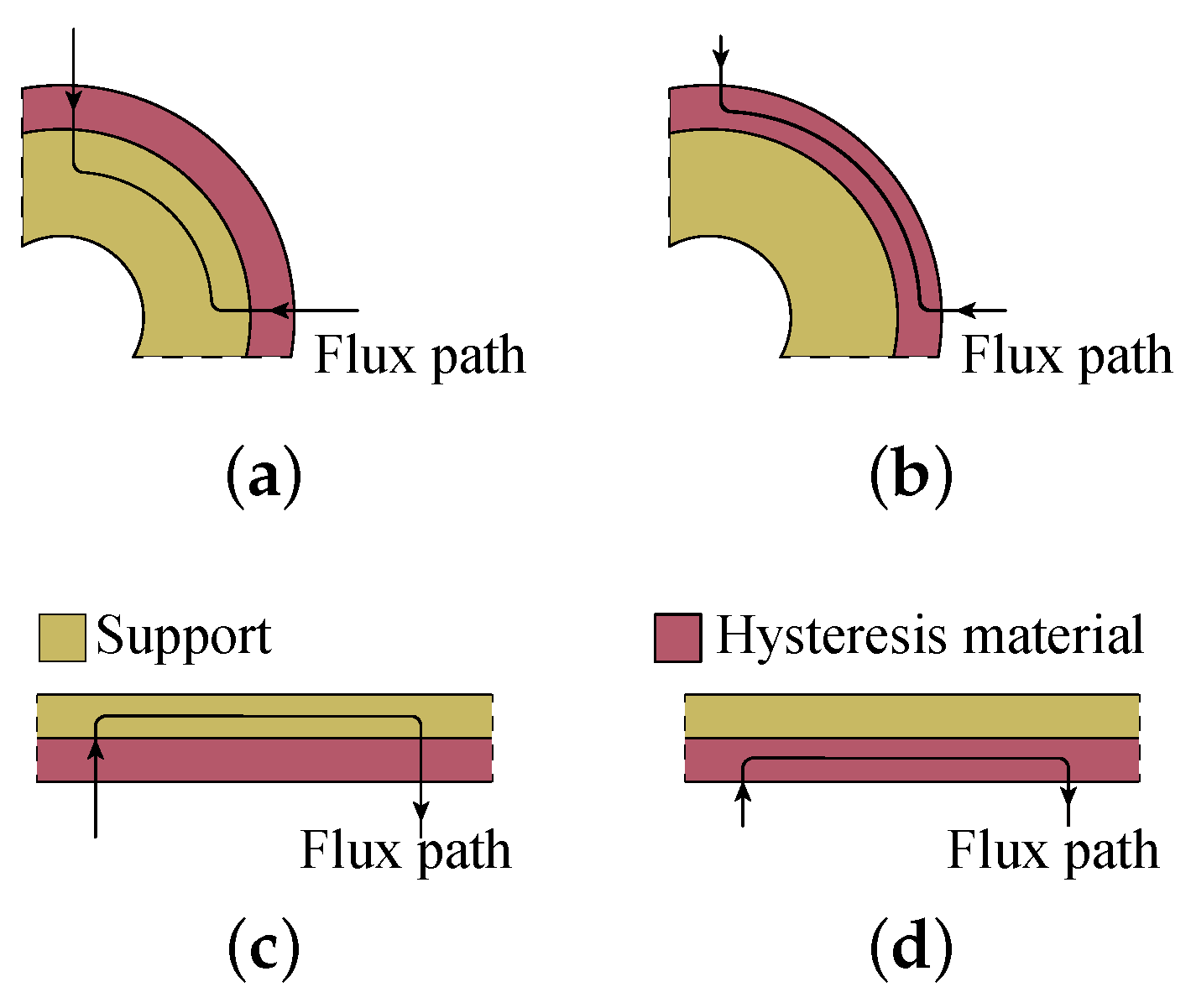
2.2. Structure and Classification
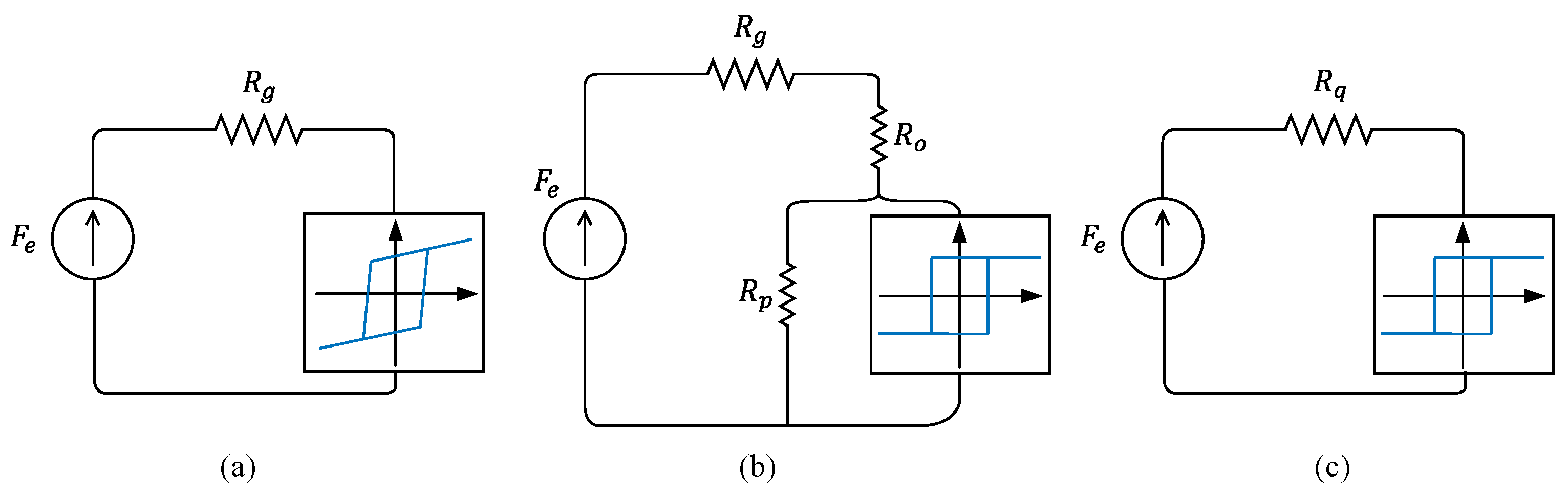
2.3. Calculation and Analysis Methods
2.4. Dynamic Model
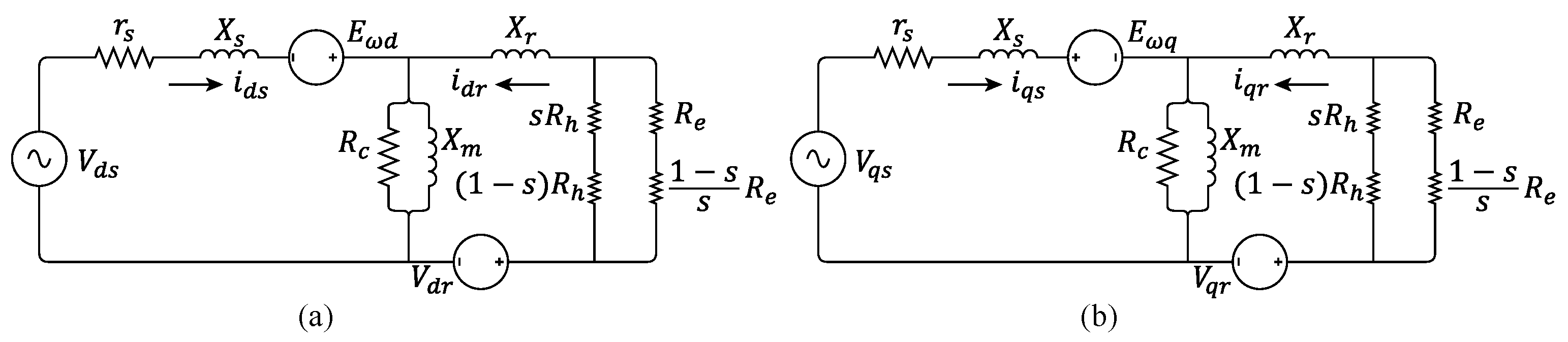
2.4.1. Dynamic Electromagnetic Model
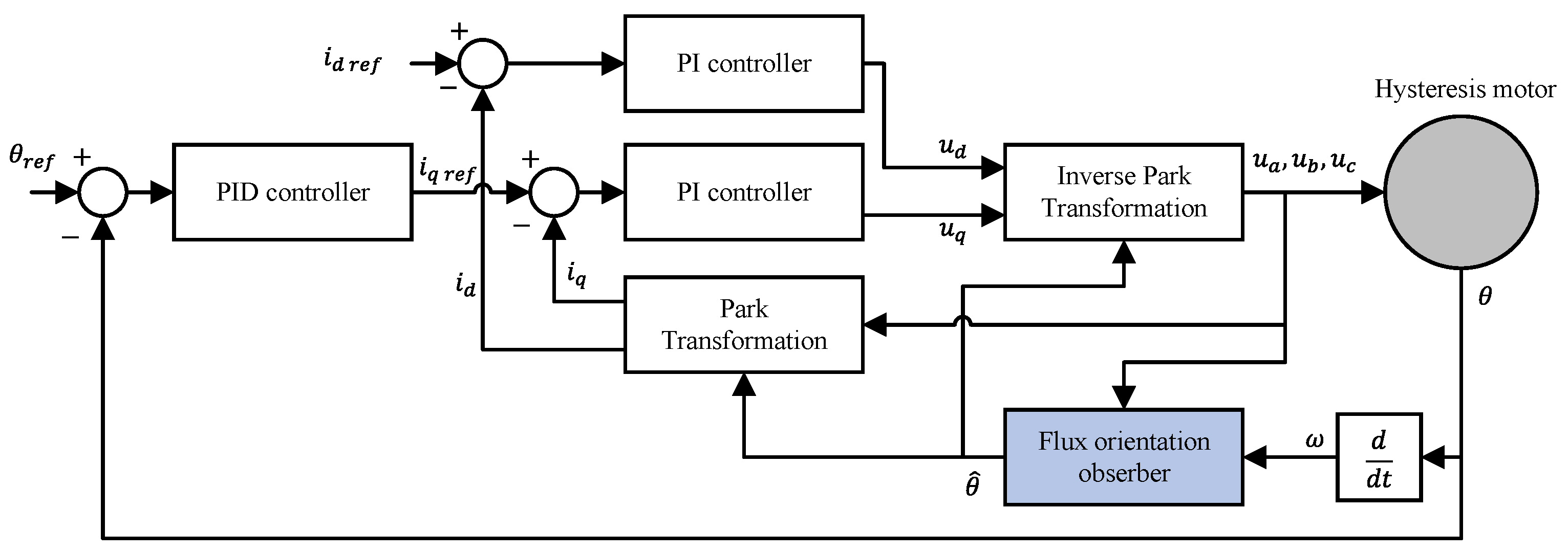
2.4.2. Dynamic Control Theory
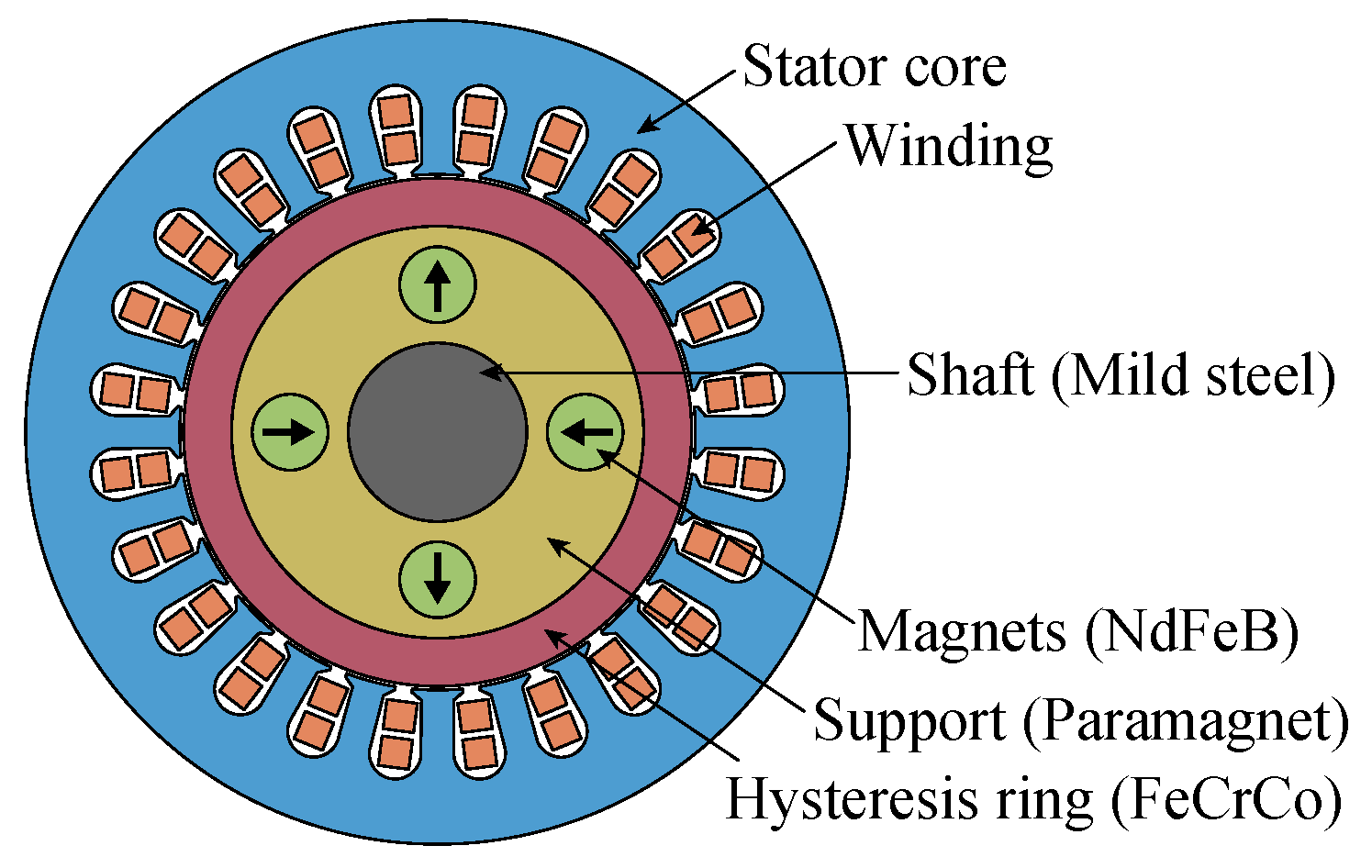
3. Permanent Magnet Hysteresis Motor
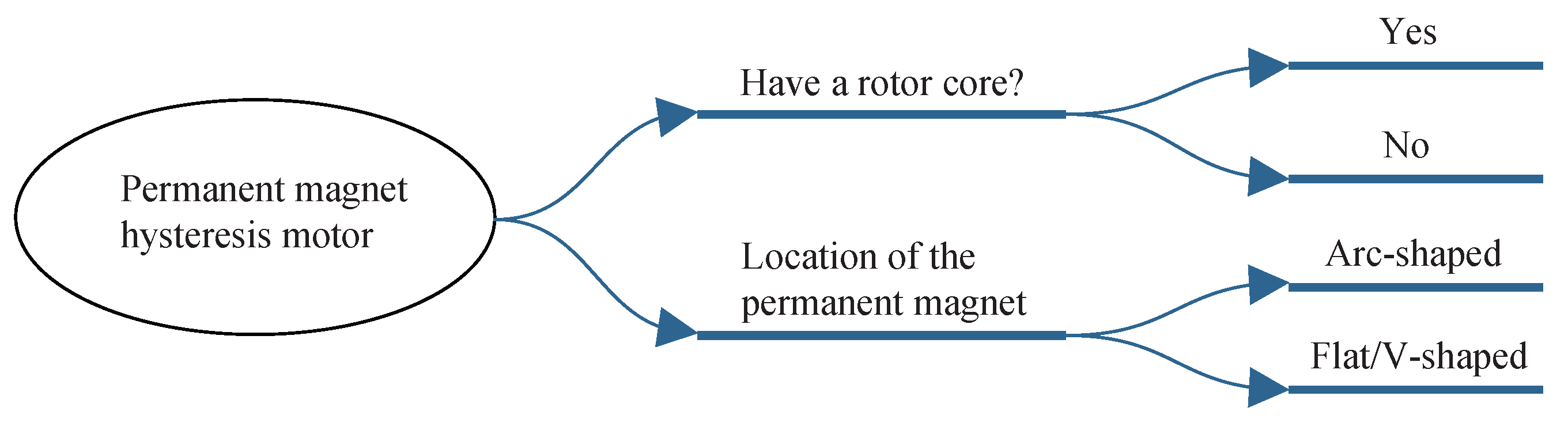
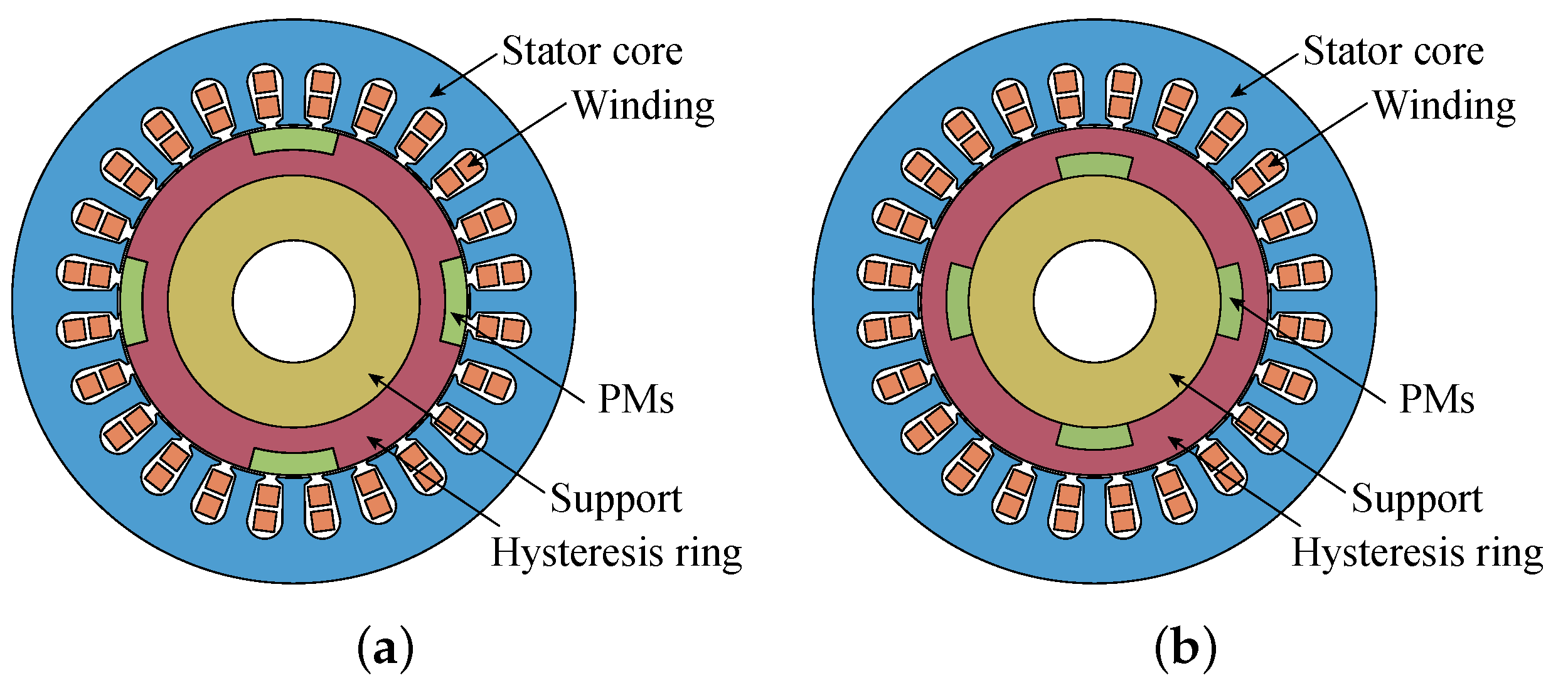
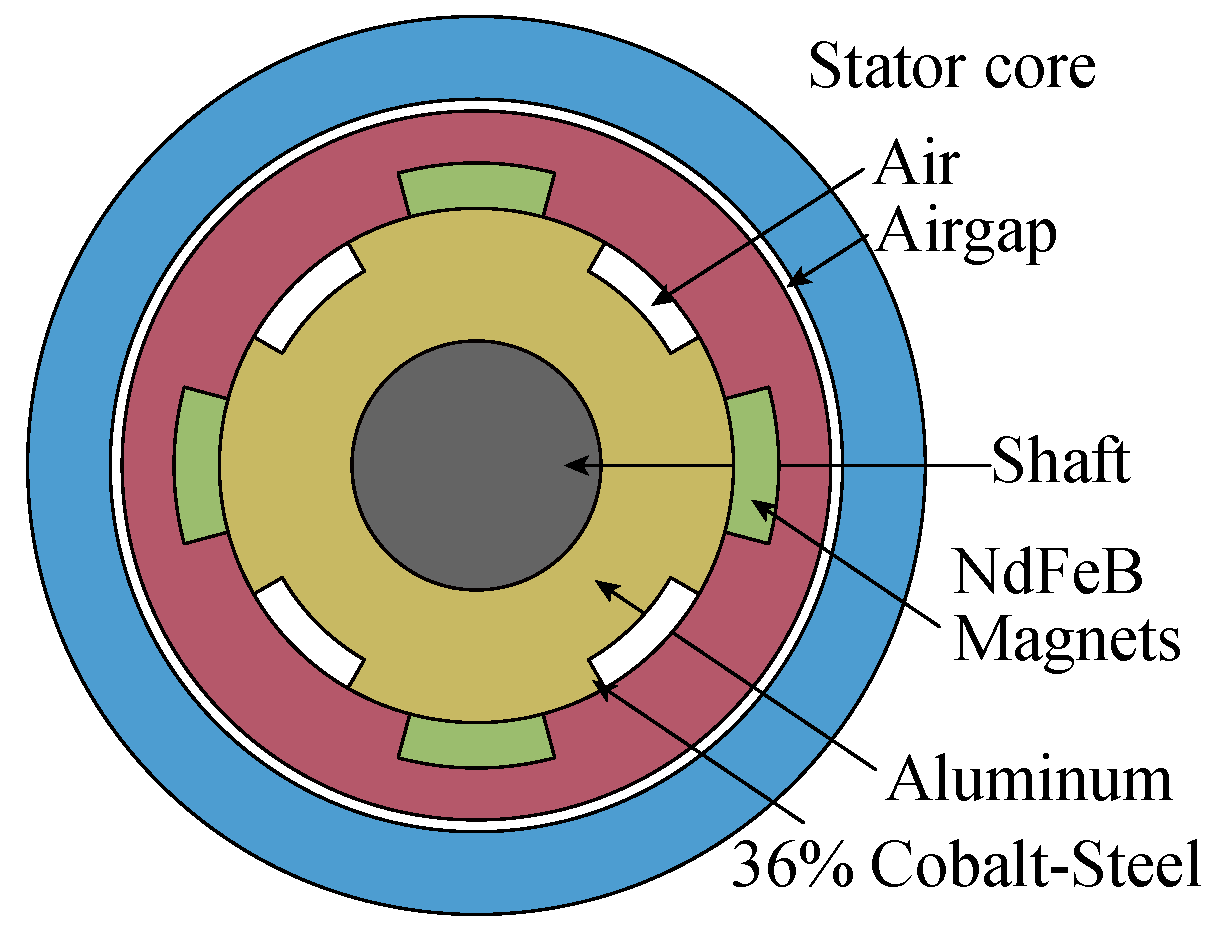
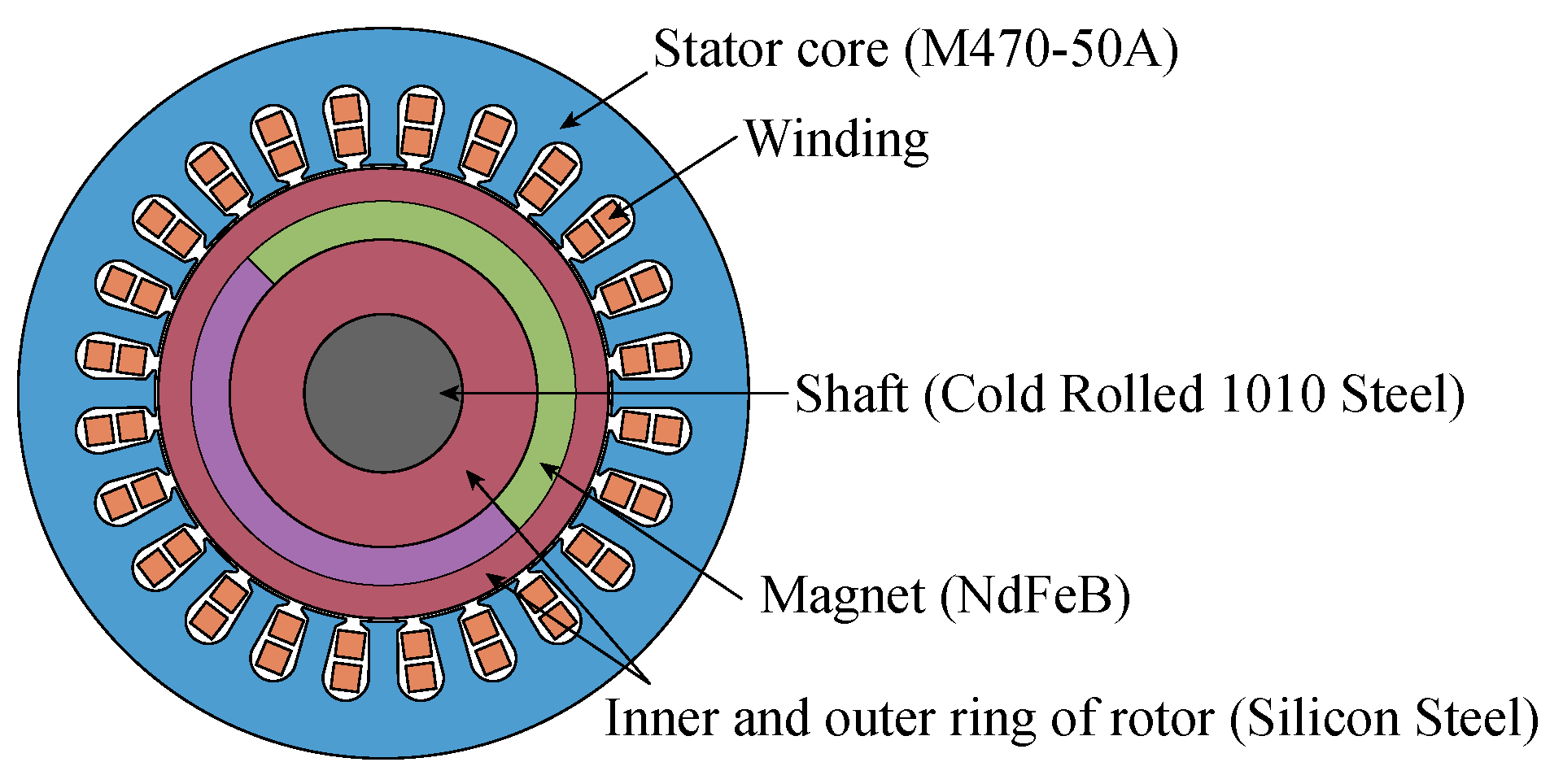
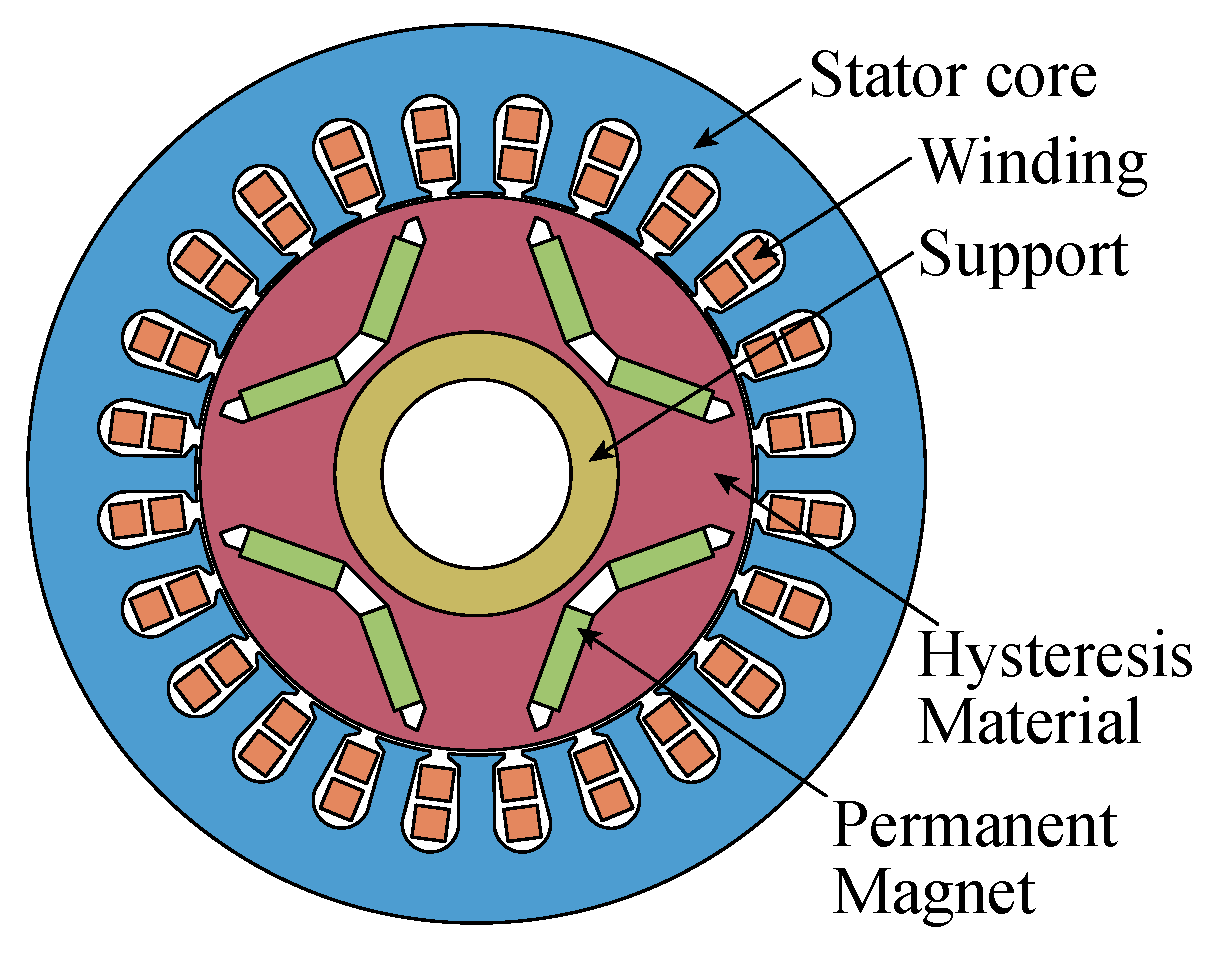
3.1. Structure and Classification
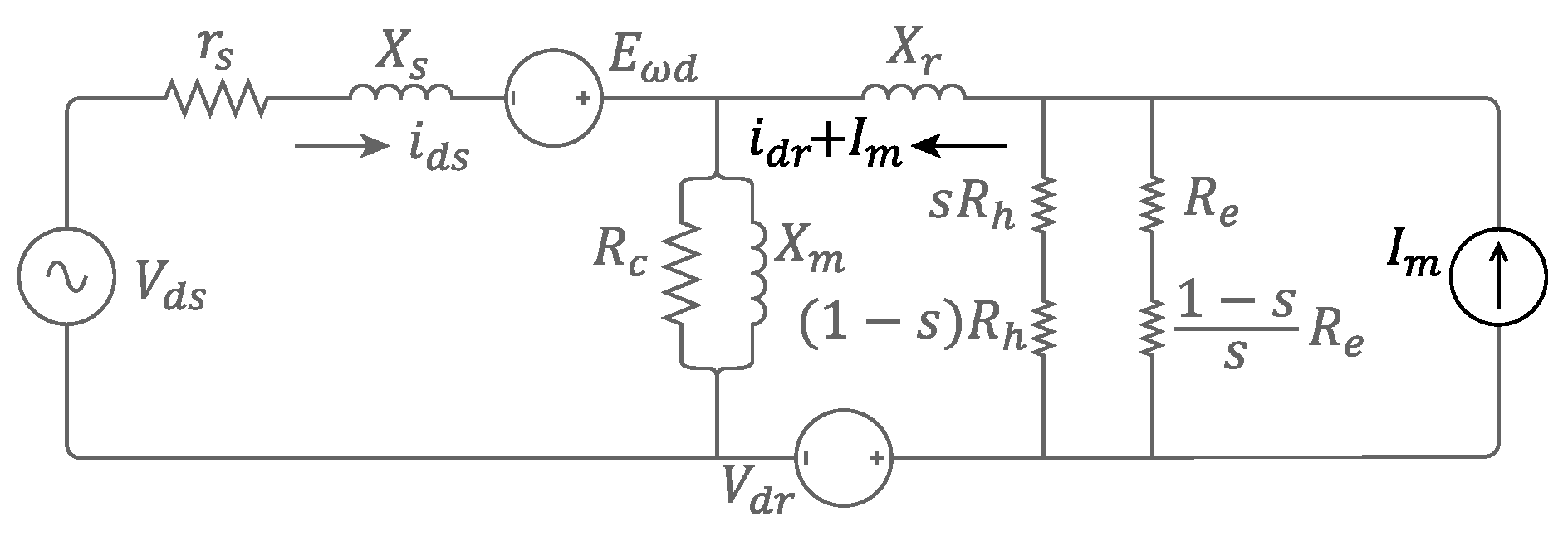
3.2. Dynamic Model
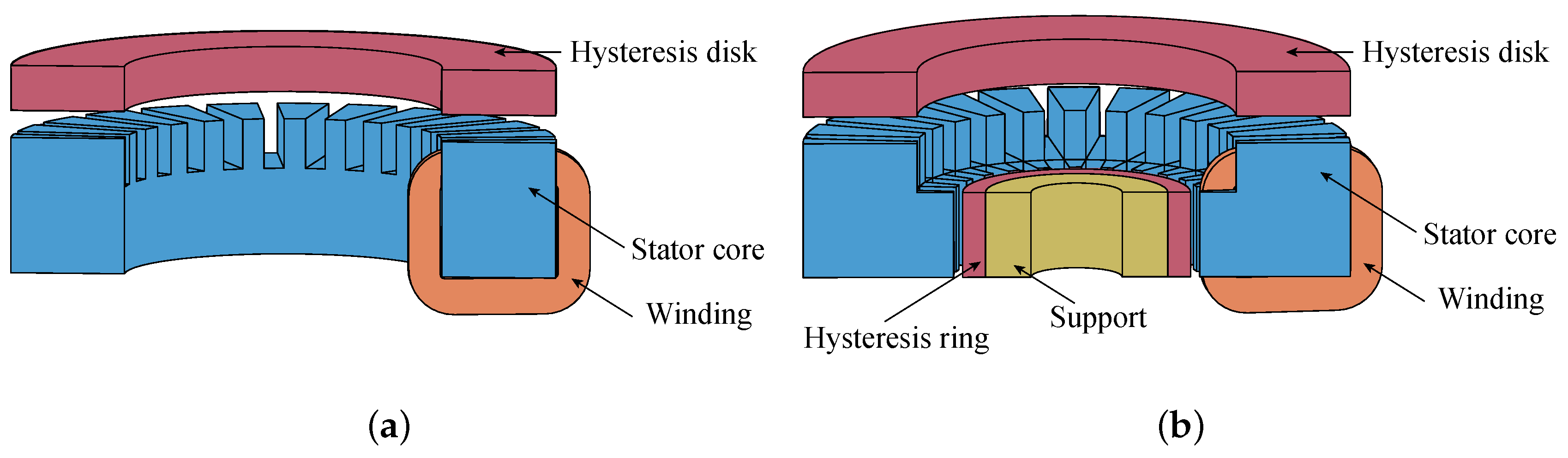
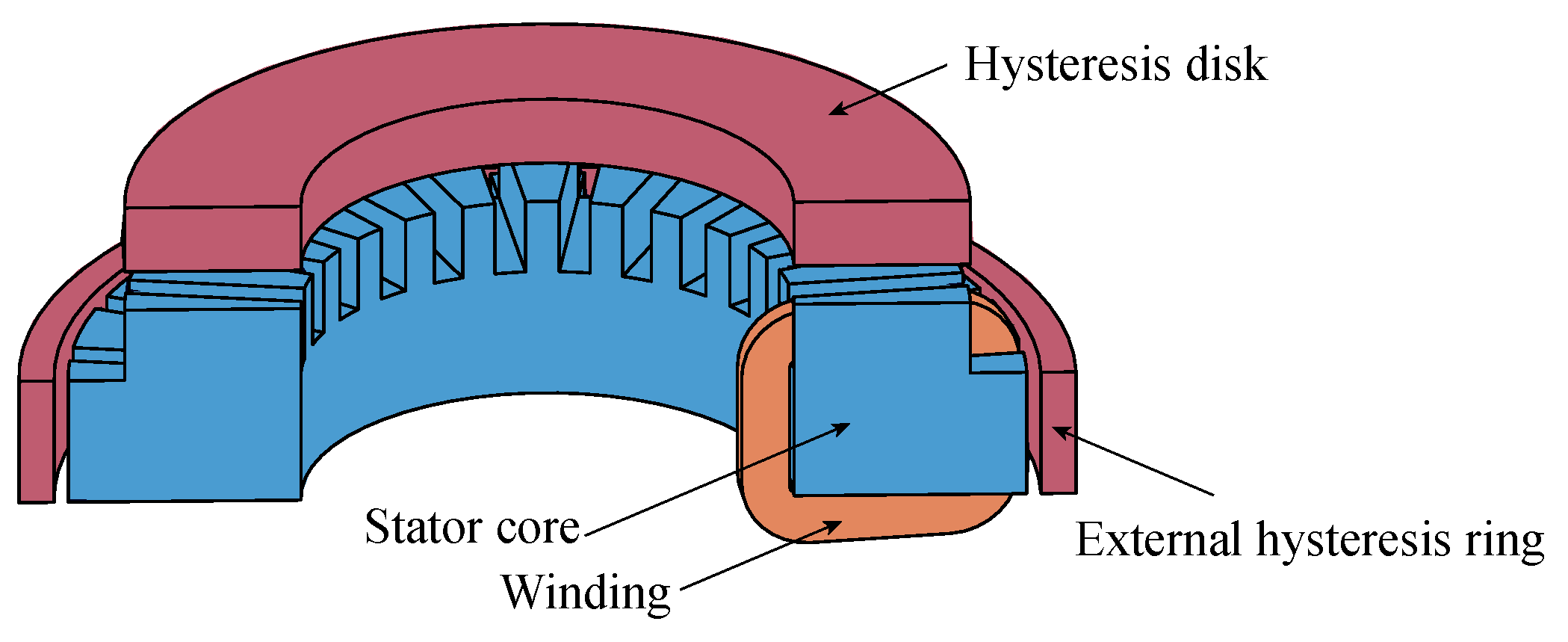
4. New Hysteresis Motor
4.1. Hybrid Magnetic Flux
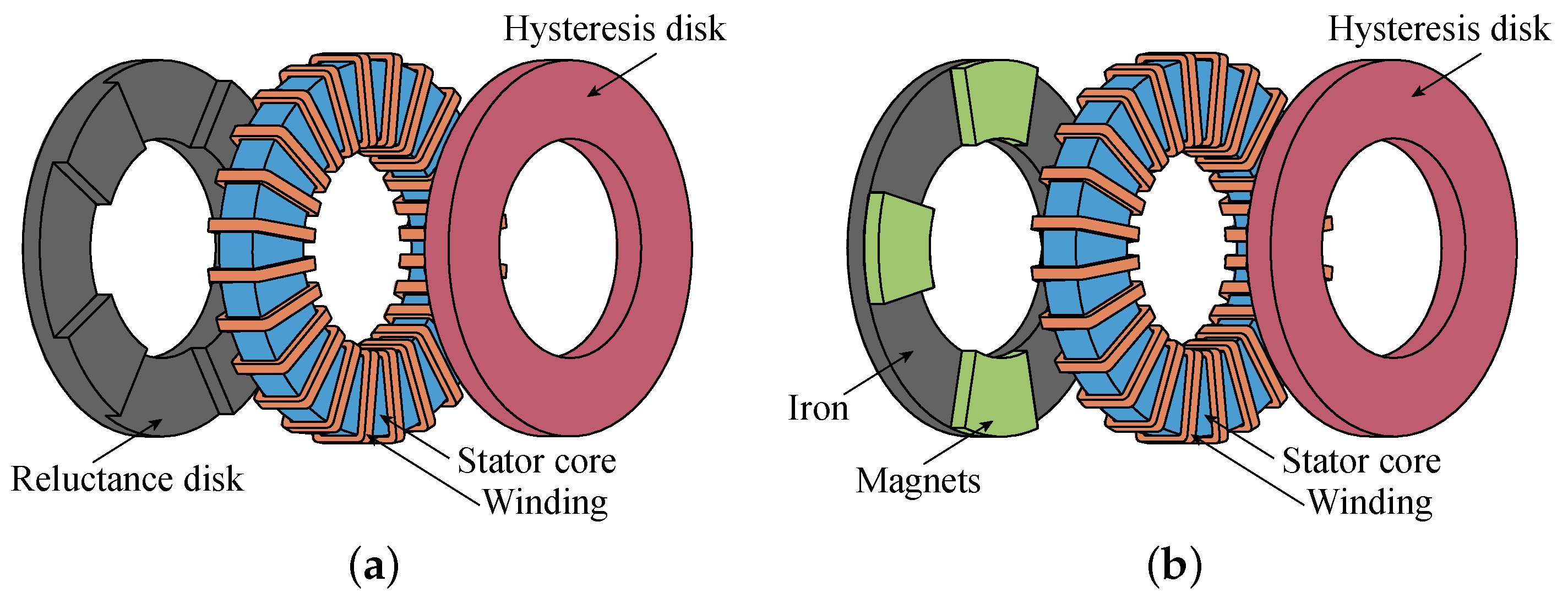
4.2. Combined Torque Type
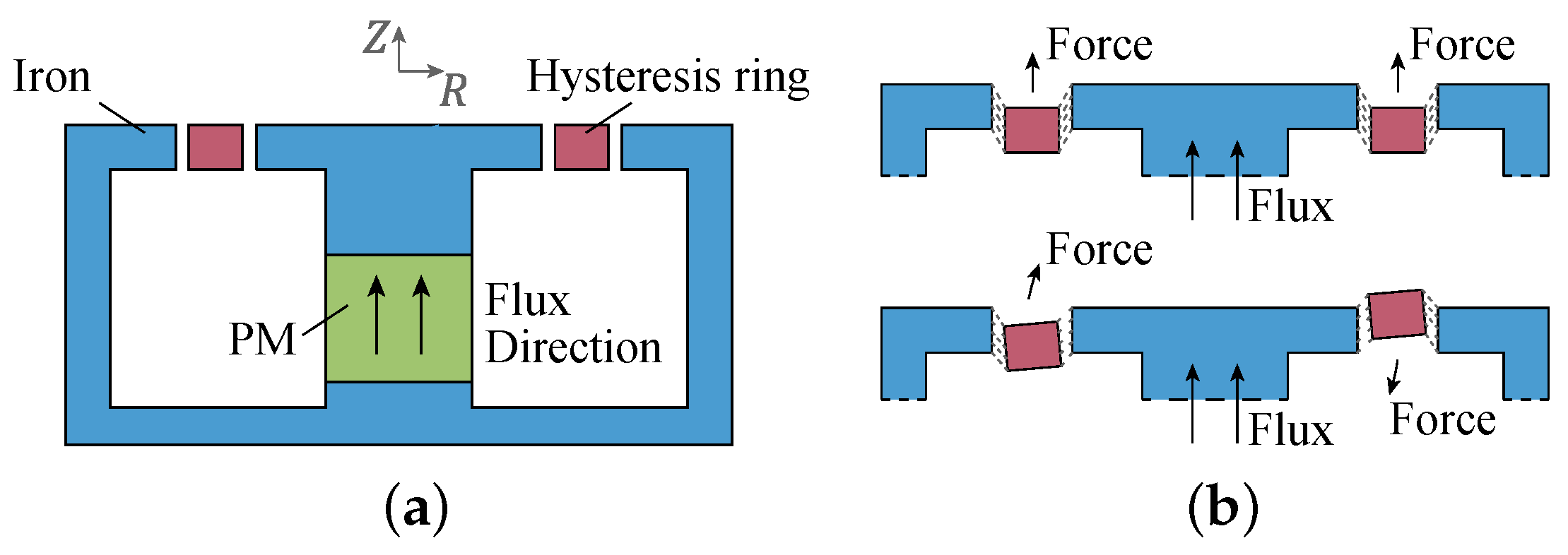
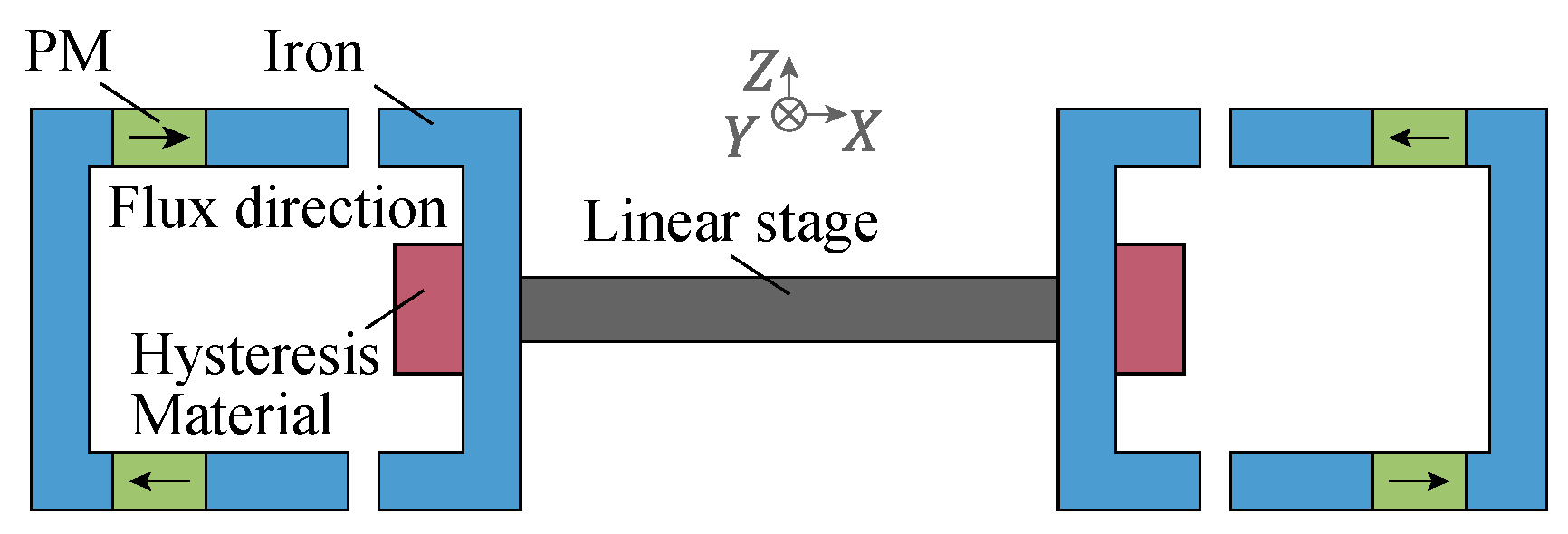
4.3. Bearingless Type
5. Research on Key Issues
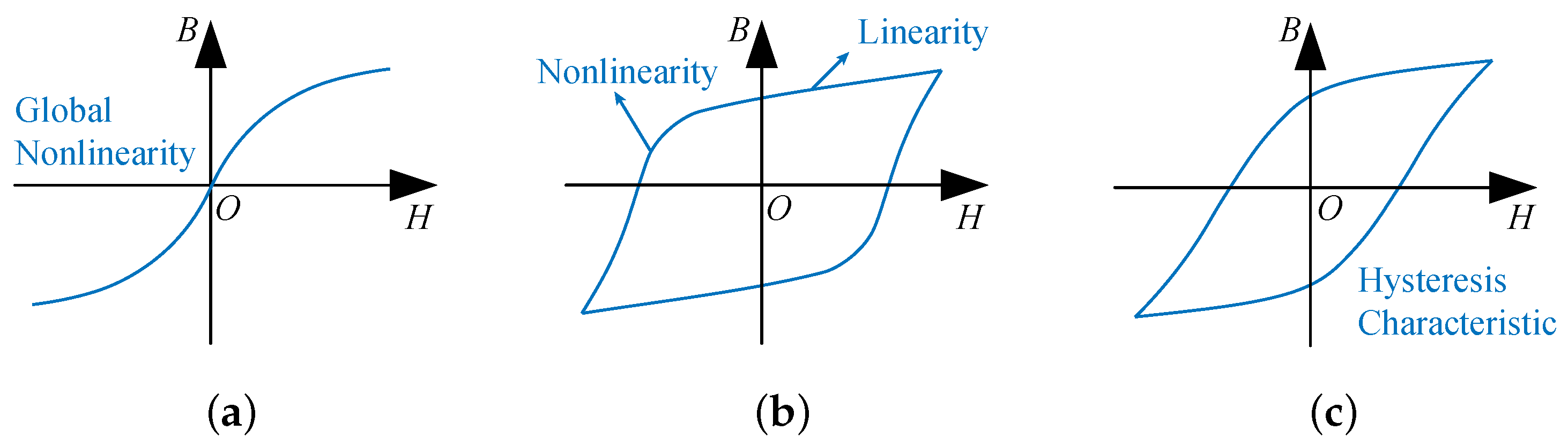
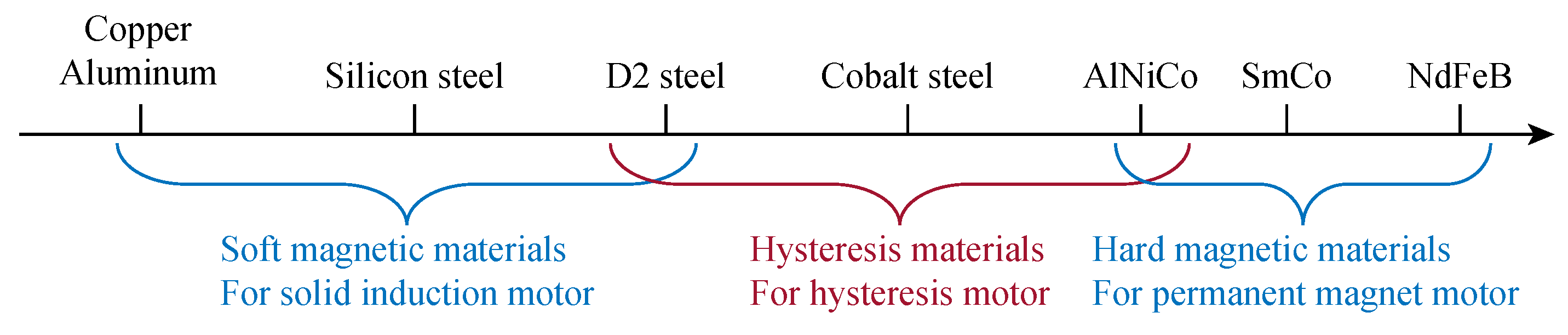
5.1. Hysteresis Materials
5.2. Hysteresis Model
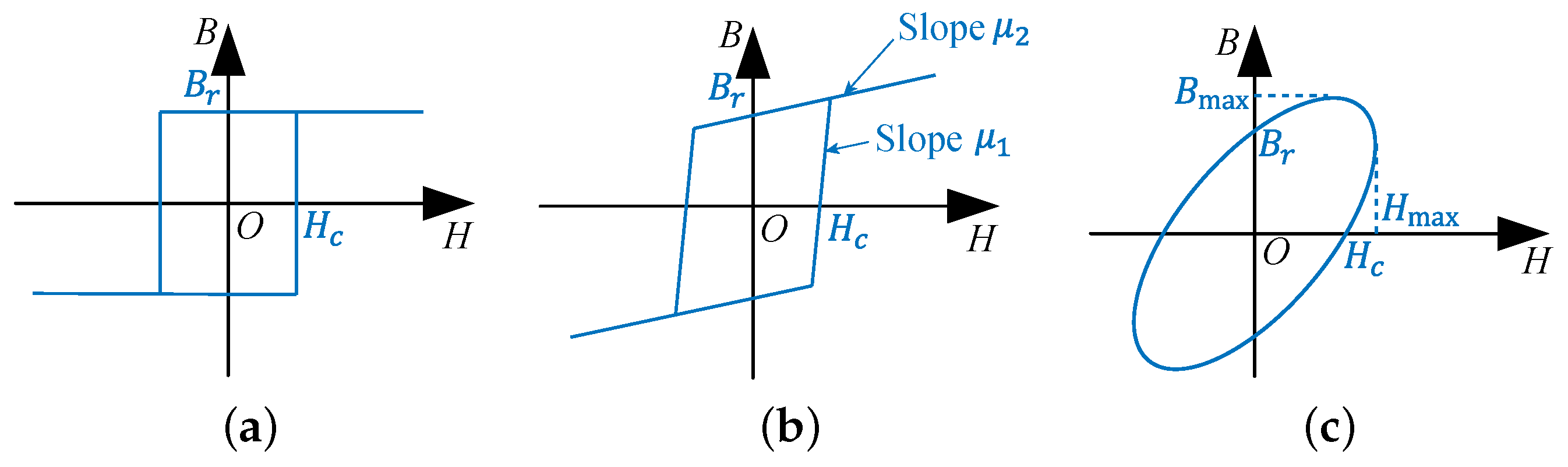
5.2.1. Approximate Model
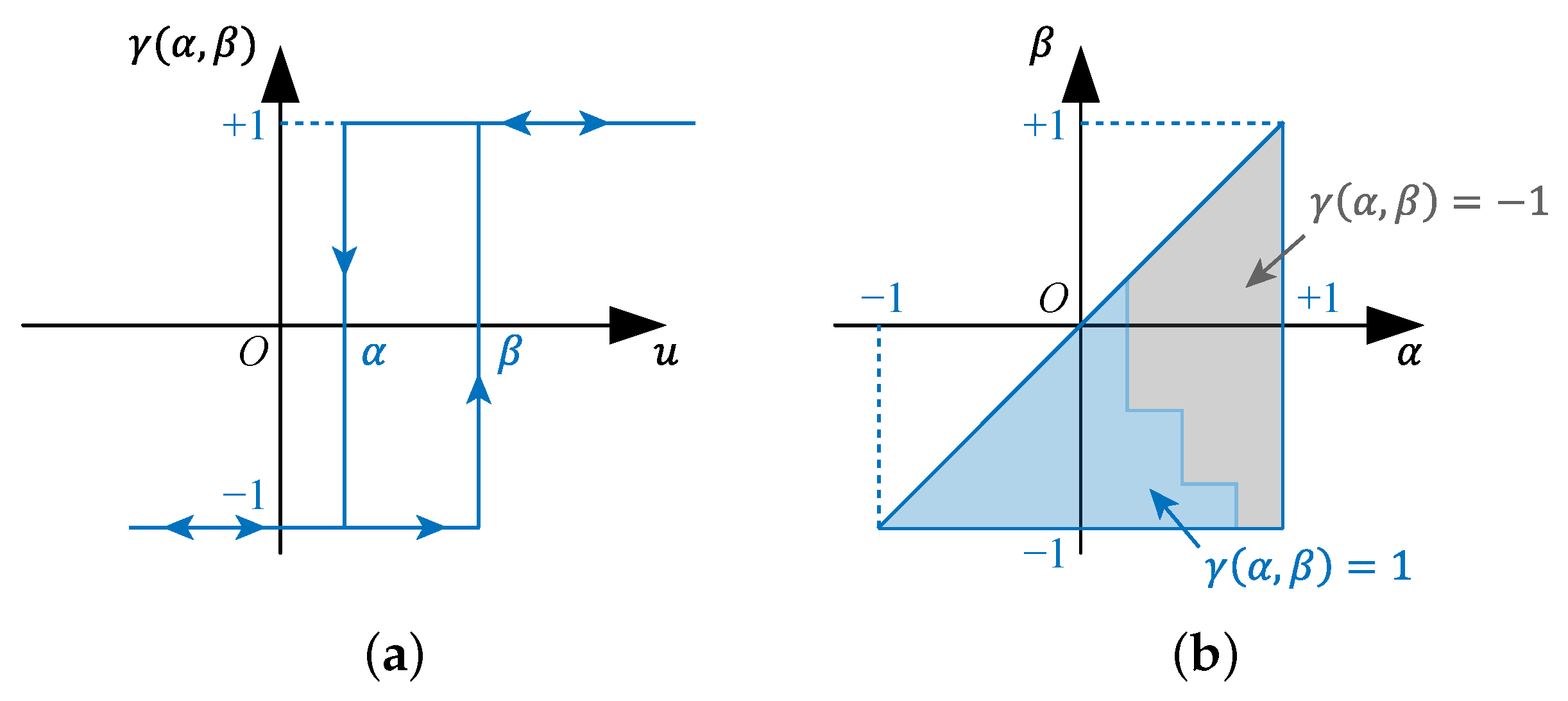
5.2.2. Preisach Model
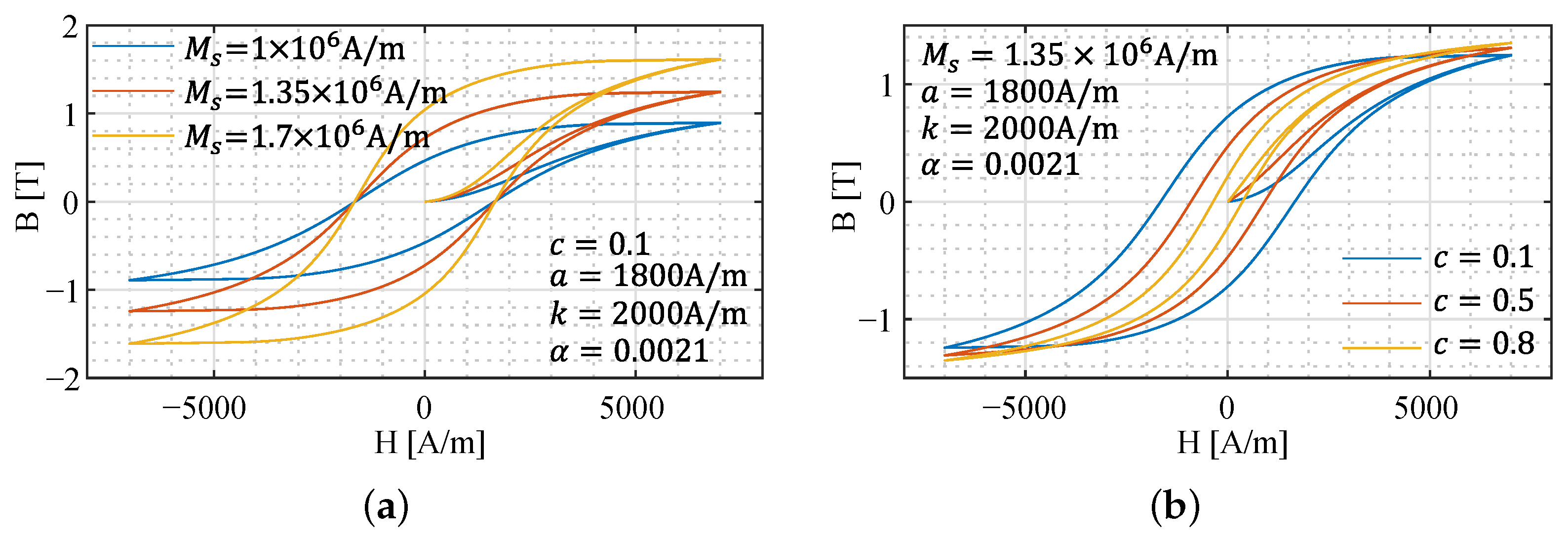
5.2.3. Jiles–Atherton Model
6. Conclusions and Future Directions
- Improve the output torque and efficiency of traditional hysteresis motor through the reasonable design of an electromagnetic structure and development of an innovative structure.
- Combine the advantages of the traditional hysteresis motor and other motors to expand more application scenarios.
- Develop a more accurate, fast and versatile analytical calculation program of the hysteresis motor, declare the coupling relationship between temperature rise, stress and electromagnetism.
- Develop new hysteresis materials to improve electromagnetic properties, thermal stability and mechanical strength.
- Apply the advanced control technologies to the hysteresis motor, and propose new control strategies suitable for the hysteresis motor to improve its control accuracy and stability.
- Explore the application of the intelligent optimization method, reduced-order model technique and digital twin in the hysteresis motor to form interdisciplinary characteristics.
- Explore the application of the hysteresis motor in more fields and scenarios, and show the potential brought by its unique advantages.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| HM | Hysteresis motor (traditional) |
| PM | Permanent magnet |
| PMHM | Permanent magnet hysteresis motor |
| RHM | Reluctance hysteresis motor |
| RFHM | Radial flux hysteresis motor |
| AFHM | Axial flux hysteresis motor |
| MRAS | Model reference adaptive system |
| ESP | Electric submersible pump |
| HFHM | Hybrid flux hysteresis motor |
| RHFHM | Reverse hybrid flux hysteresis motor |
| MSRS | Magnetically suspended reaction sphere |
| JA | Jiles–Atherton |
References
- Steinmetz, C.P. On the Law of Hysteresis (Part II.) and Other Phenomena of the Magnetic Circuit. Trans. Am. Inst. Electr. Eng. 1892, 9, 619–758. [Google Scholar] [CrossRef]
- Teare, B.R. Theory of hysteresis-motor torque. Electr. Eng. 1940, 59, 907–912. [Google Scholar] [CrossRef]
- Zhou, L.; Gruber, W.; Trumper, D.L. Position Control for Hysteresis Motors: Transient-Time Model and Field-Oriented Control. IEEE Trans. Ind. Appl. 2018, 54, 3197–3207. [Google Scholar] [CrossRef]
- Zhou, L. Magnetically Levitated Hysteresis Motor Driven Linear Stage for In-Vacuum Transportation Tasks. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2019. [Google Scholar]
- Wikipedia. Outgassing. Available online: https://en.wikipedia.org/wiki/Outgassing (accessed on 15 April 2023).
- NASA. Outgassing Data for Selecting Spacecraft Materials. Available online: https://outgassing.nasa.gov/ (accessed on 15 April 2023).
- Noh, M.; Gruber, W.; Trumper, D.L. Hysteresis Bearingless Slice Motors with Homopolar Flux-Biasing. IEEE/ASME Trans. Mechatron. 2017, 22, 2308–2318. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Yan, X.; Zhang, Z. With the electrical properties of a new turbocharger. In Proceedings of the 2010 International Conference on Mechanic Automation and Control Engineering, Wuhan, China, 26–28 June 2010; pp. 3465–3468. [Google Scholar] [CrossRef]
- Galluzzi, R.; Tonoli, A.; Amati, N. Magnetic hysteresis machines for next-generation electric turbochargers. In Proceedings of the 2017 International Conference of Electrical and Electronic Technologies for Automotive, Torino, Italy, 15–16 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Gedıkpinar, M. Design and Implementation of a Self-Starting Permanent Magnet Hysteresis Synchronous Motor for Pump Applications. IEEE Access. 2019, 7, 186211–186216. [Google Scholar] [CrossRef]
- Rabbi, S.F.; Rahman, M.A. Equivalent Circuit Modeling of a Hysteresis Interior Permanent Magnet Motor for Electric Submersible Pumps. IEEE Trans. Magn. 2016, 52, 8104304. [Google Scholar] [CrossRef]
- Rabbi, S.F.; Rahman, M.A.; Sarker, M.M.; Butt, S.D. Modeling and performance evaluation of a hysteresis IPM motor drive for electric submersible pumps. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 4105–4112. [Google Scholar] [CrossRef]
- Chalmers, B.J.; Ciric, I.R. Performance Analysis of Hysteresis-Reluctance Motors with Segmental Rotors. Proc. IEE. 1974, 121, 991. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.A.; Osheiba, A.M. Steady-State Performance Analysis of Polyphase Hysteresis-Reluctance Motors. IEEE Trans. Ind. Appl. 1985, IA-21, 659–663. [Google Scholar] [CrossRef]
- Zhou, L.; Imani Nejad, M.; Trumper, D.L. One-axis hysteresis motor driven magnetically suspended reaction sphere. Mechatronics 2017, 42, 69–80. [Google Scholar] [CrossRef]
- Rahman, M.; Qin, R. A permanent magnet hysteresis hybrid synchronous motor for electric vehicles. IEEE Trans. Ind. Electron. 1997, 44, 46–53. [Google Scholar] [CrossRef]
- Benfu, M. Design of Hysteresis Motor for Liquid Float Gyroscope. Master’s Thesis, Tianjin University, Tianjin, China, 2017. [Google Scholar]
- Darabi, A.; Lesani, H.; Ghanbari, T.; Akhavanhejazi, A. Modeling and optimum design of disk-type hysteresis motors. In Proceedings of the 2007 International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2007; pp. 998–1002. [Google Scholar] [CrossRef]
- Nasiri-Zarandi, R.; Mirsalim, M.; Tenconi, A. A Novel Hybrid Hysteresis Motor With Combined Radial and Axial Flux Rotors. IEEE Trans. Ind. Electron. 2016, 63, 1684–1693. [Google Scholar] [CrossRef]
- Rayleigh, L. XXI. Notes on magnetism.—I. On the energy of magnetized iron. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1886, 22, 175–183. [Google Scholar] [CrossRef]
- Steinmetz, C.P. Theory and Calculation of Alternating Current Phenomena; Kessinger Publishing: Whitefish, MT, USA, 2008. [Google Scholar]
- Steinmetz, C.P. Theory and Calculations of Electrical Apparatus; McGraw-Hill Book Company: New York, NY, USA, 1917. [Google Scholar]
- Livens, G.H. The Theory of Electricity. Nature 1927, 119, 385. [Google Scholar] [CrossRef]
- Holmes, W.; Grundy, E. Small self-starting synchronous time motors. J. Inst. Electr. Eng. 1935, 77, 379–399. [Google Scholar] [CrossRef]
- Giulii Capponi, F.; De Donato, G.; Caricchi, F. Recent Advances in Axial-Flux Permanent-Magnet Machine Technology. IEEE Trans. Ind. Appl. 2012, 48, 2190–2205. [Google Scholar] [CrossRef]
- Zhou, L.; Trumper, D.L. Magnetically Levitated Linear Stage With Linear Bearingless Slice Hysteresis Motors. IEEE/ASME Trans. Mechatron. 2021, 26, 1084–1094. [Google Scholar] [CrossRef]
- Darabi, A.; Ghanbari, T.; Sanati Moghadam, M. Slotless axial flux hysteresis motor, modelling and performance calculation. IET Electr. Power Appl. 2009, 3, 491–501. [Google Scholar] [CrossRef]
- Darabi, A.; Sanati-Moghadam, M.; Ghanbari, T. Coreless Dual-rotor Disc Hysteresis Motor, Modeling, and Performance Prediction. Electr. Power Compon. Syst. 2010, 38, 575–591. [Google Scholar] [CrossRef]
- Copeland, M.A.; Slemon, G.R. An Analysis of the Hysteresis Motor I—Analysis of the Idealized Machine. IEEE Trans. Power Appar. Syst. 1963, 82, 34–42. [Google Scholar] [CrossRef]
- Copeland, M.A.; Slemon, G.R. An Analysis of the Hysteresis Motor II-The Circumferential-Flux Machine. IEEE Trans. Power Appar. Syst. 1964, 83, 619–625. [Google Scholar] [CrossRef]
- Ghanbari, T.; Sanati Moghadam, M.; Darabi, A. Comparison between coreless and slotless kinds of dual rotor discs hysteresis motors. IET Electr. Power Appl. 2016, 10, 133–140. [Google Scholar] [CrossRef]
- Nitao, J.J.; Scharlemann, E.T.; Kirkendall, B. Equivalent Circuit Modeling of Hysteresis Motors; Lawrence Livermore National Lab.(LLNL): Livermore, CA, USA, 2009. [Google Scholar]
- Lubin, T.; Mezani, S.; Rezzoug, A. Exact Analytical Method for Magnetic Field Computation in the Air Gap of Cylindrical Electrical Machines Considering Slotting Effects. IEEE Trans. Magn. 2010, 46, 1092–1099. [Google Scholar] [CrossRef] [Green Version]
- Pfister, P.D.; Perriard, Y. Slotless Permanent-Magnet Machines: General Analytical Magnetic Field Calculation. IEEE Trans. Magn. 2011, 47, 1739–1752. [Google Scholar] [CrossRef]
- Nasiri-Zarandi, R.; Mirsalim, M. Analysis and Torque Calculation of an Axial Flux Hysteresis Motor Based on Hyperbolic Model of Hysteresis Loop in Cartesian Coordinates. IEEE Trans. Magn. 2015, 51, 8105710. [Google Scholar] [CrossRef]
- Repetto, M.; Uzunov, P. Analysis of Hysteresis Motor Starting Torque Using Finite Element Method and Scalar Static Hysteresis Model. IEEE Trans. Magn. 2013, 49, 2405–2408. [Google Scholar] [CrossRef]
- Kim, H.K.; Hong, S.K.; Jung, H.K. Analysis of hysteresis motor using finite element method and magnetization-dependent model. IEEE Trans. Magn. 2000, 36, 685–688. [Google Scholar] [CrossRef]
- Hong, S.K.; Kim, K.K.; Kim, H.S.; Jung, H.K. Torque calculation of hysteresis motor using vector hysteresis model. IEEE Trans. Magn. 2000, 36, 1932–1935. [Google Scholar] [CrossRef]
- Gallicchio, G.; Palmieri, M.; Di Nardo, M.; Cupertino, F. Fast Torque Computation of Hysteresis Motors and Clutches Using Magneto-static Finite Element Simulation. Energies 2019, 12, 3311. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.Y.; Hahn, S.Y.; Park, G.S.; Lee, K.S. Torque computation of hysteresis motor using finite element analysis with asymmetric two dimensional magnetic permeability tensor. IEEE Trans. Magn. 1998, 34, 3032–3035. [Google Scholar] [CrossRef]
- Galluzzi, R.; Amati, N.; Tonoli, A. Modeling, Design, and Validation of Magnetic Hysteresis Motors. IEEE Trans. Ind. Electron. 2020, 67, 1171–1179. [Google Scholar] [CrossRef]
- Padilha, J.B.; Kuo-Peng, P.; Sadowski, N.; Batistela, N.J. Vector hysteresis model associated to FEM in a hysteresis motor modeling. In Proceedings of the 2016 IEEE Conference on Electromagnetic Field Computation (CEFC), Miami, FL, USA, 13–16 November 2016; p. 1. [Google Scholar] [CrossRef]
- Darabi, A.; Tahanian, H.; Amani, S.; Sedghi, M. An Experimental Comparison of Disc-Type Hysteresis Motors With Slotless Magnetic Stator Core. IEEE Trans. Ind. Electron. 2017, 64, 4642–4652. [Google Scholar] [CrossRef]
- Miyairi, T.K.S. A basic equivalent circuit of the hysteresis motor. J. Inst. Electr. Eng. Jpn. 1965, 85, 1740–1748. [Google Scholar]
- Darabi, A.; Ghanbari, T.; Rafiei, M.; Lesani, H.; Sanati-Moghadam, M. Dynamic Performance Analysis of Hysteresis Motors by a Linear Time-Varying Model. Iran. J. Electr. Electron. Eng. 2008, 4, 202–215. [Google Scholar]
- Modarres, M.; Kwon, B.I. Rotor design to improve dynamic performance of axial flux hysteresis motors. IET Electr. Power Appl. 2015, 9, 44–49. [Google Scholar] [CrossRef] [Green Version]
- Niasar, A.H.; Ghanbari, A.; PirZadeh, A. An improved analytical dynamic modeling of hysteresis motor. In Proceedings of the 2016 24th Iranian Conference on Electrical Engineering (ICEE), Shiraz, Iran, 10–12 May 2016; pp. 879–884. [Google Scholar] [CrossRef]
- Niasar, A.H. A novel time varying dynamic modeling for hysteresis motor. Sci. Iran. 2017, 24, 1395–1409. [Google Scholar]
- Rezaeealam, B. Finite-element/boundary-element transient modelling of hysteresis motors. J. Magn. Magn. Mater. 2021, 519, 167474. [Google Scholar] [CrossRef]
- Clurman, S. On hunting in hysteresis motors and new damping techniques. IEEE Trans. Magn. 1971, 7, 512–517. [Google Scholar] [CrossRef]
- Soroush, H.R.; Rahmati, A.; Moghbelli, H.; Vahedi, A.; Niasar, A.H. Study on the hunting in high speed hysteresis motors due to the rotor hysteresis material. In Proceedings of the IEEE EUROCON 2009, St. Petersburg, Russia, 18–23 May 2009; pp. 677–681. [Google Scholar] [CrossRef]
- Kim, H.S.; Hong, S.K.; Han, J.H.; Choi, D.J. Dynamic Modeling and Load Characteristics of Hysteresis Motor Using Preisach Model. In Proceedings of the 2018 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Republic of Korea, 7–10 October 2018; pp. 560–563. [Google Scholar] [CrossRef]
- Roters, H.C. The hysteresis motor-advances whick permit economical fractional horsepower ratings. Trans. Am. Inst. Electr. Eng. 1947, 66, 1419–1430. [Google Scholar] [CrossRef]
- Kataoka, T.; Ishikawa, T.; Takahashi, T. Analysis of a hysteresis motor with overexcitation. IEEE Trans. Magn. 1982, 18, 1731–1733. [Google Scholar] [CrossRef]
- Kurihara, K.; Kurihara, N.; Kubota, T. Electric power saving operation of the hysteresis motor using short-duration overexcitation. Int. J. Appl. Electromagn. Mech. 2018, 57, 165–170. [Google Scholar] [CrossRef]
- Kurihara, K.; Kurihara, N.; Kubota, T. Energy-saving operation of the hysteresis motor utilizing overexcitation phenomenon. In Proceedings of the 2017 18th International Symposium on Electromagnetic Fields in Mechatronics, Electrical and Electronic Engineering (ISEF) Book of Abstracts, Lodz, Poland, 14–16 September 2017; pp. 1–2. [Google Scholar]
- Kurihara, K.; Kurihara, N.; Kubota, T. Transient Performance Analysis for the Hysteresis Motor with Overexcitation Using Play Model. In Proceedings of the 2019 19th International Symposium on Electromagnetic Fields in Mechatronics, Electrical and Electronic Engineering (ISEF), Nancy, France, 29–31 August 2019; pp. 1–2. [Google Scholar] [CrossRef]
- Savio, M. Hysteresis Motor: Transient-Time Model and Observer. Master’s Thesis, Politecnico Di Torino, Torino, Italy, 2021. [Google Scholar]
- Zare, M.; Niasar, A.H. A novel sensorless vector control of hysteresis motor drive. In Proceedings of the 4th Annual International Power Electronics, Drive Systems and Technologies Conference, Tehran, Iran, 13–14 February 2013; pp. 261–264. [Google Scholar] [CrossRef]
- Niasar, A.H.; Moghbelli, H.; Yavari, M. Sensorless Speed Control of Hystersis Motor Based on Model Reference Adaptive System and Luenberger Observer Techniques; Springer: Berlin/Heidelberg, Germany, 2012; pp. 455–464. [Google Scholar] [CrossRef]
- Kurihara, K.; Rahman, M. Transient performance analysis for permanent-magnet hysteresis synchronous motor. IEEE Trans. Ind. Appl. 2004, 40, 135–142. [Google Scholar] [CrossRef]
- Qin, R.; Rahman, M. Magnetic equivalent circuit of PM hysteresis synchronous motor. IEEE Trans. Magn. 2003, 39, 2998–3000. [Google Scholar] [CrossRef]
- Rabbi, S.F.; Rahman, M.A. Analytical modeling of a hysteresis interior permanent magnet motor. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 2612–2617. [Google Scholar] [CrossRef]
- Rabbi, S.F.; Halloran, M.P.; LeDrew, T.; Matchem, A.; Rahman, M.A. Modeling and V/F Control of a Hysteresis Interior Permanent-Magnet Motor. IEEE Trans. Ind. Appl. 2016, 52, 1891–1901. [Google Scholar] [CrossRef]
- Rabbi, S.F.; Rahman, M.A. Transient analysis of a line start hysteresis interior permanent magnet motor. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 4866–4873. [Google Scholar] [CrossRef]
- Rabbi, S.F.; Zhou, P.; Rahman, M.A. Design and Performance Analysis of a Self-Start Radial Flux-Hysteresis Interior Permanent Magnet Motor. IEEE Trans. Magn. 2017, 53, 8209304. [Google Scholar] [CrossRef]
- Rabbi, S.F.; Rahman, M.A. Analysis of a radial flux hysteresis IPM motor. In Proceedings of the 2015 IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE), Halifax, NS, Canada, 3–6 May 2015; pp. 7–12. [Google Scholar] [CrossRef]
- Jagiela, M.; Garbiec, T.; Kowol, M. Design of High-Speed Hybrid Hysteresis Motor Rotor Using Finite Element Model and Decision Process. IEEE Trans. Magn. 2014, 50, 861–864. [Google Scholar] [CrossRef]
- Qin, R.; Rahman, M. DSP based torque and speed controls of the permanent magnet hysteresis synchronous motor. In Proceedings of the 1997 IEEE International Electric Machines and Drives Conference Record, Milwaukee, WI, USA, 18–21 May 1997; pp. MC3/9.1–MC3/9.3. [Google Scholar] [CrossRef]
- Nasiri, A.; Mirsalim, M. Analysis of a reverse hybrid hysteresis motor using hyperbolic modelling of hysteresis loop. IET Electr. Power Appl. 2020, 14, 1339–1346. [Google Scholar] [CrossRef]
- Mizani, H.; Darabi, A.; Omrani, S. A New Hybrid Hysteresis Reluctance Disc Type Motor; design, Prototyping and Analysis. In Proceedings of the 2018 International Conference of Electrical and Electronic Technologies for Automotive, Milan, Italy, 9–11 July 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Behniafar, A.; Darabi, A. Analytical modeling of disc-type permanent magnet hysteresis motor in steady-state operational conditions. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2017, 36, 991–1007. [Google Scholar] [CrossRef]
- Behniafar, A.; Darabi, A. A new semianalytical method for analysis of the disc-type permanent magnet hysteresis motor in steady-state operational conditions. Turk. J. Electr. Eng. Comput. Sci. 2018, 26, 542–553. [Google Scholar] [CrossRef]
- Nasiri, A.A.; Mirsalim, M.; Nasiri, A.R. A Novel Hybrid Hysteresis Motor with Multi-Stack PM-Hysteresis Rotor; General Modeling, Analysis and Design Optimization. In Proceedings of the 2019 International Power System Conference (PSC), Tehran, Iran, 9–11 December 2019; pp. 150–158. [Google Scholar] [CrossRef]
- Anonymous. Status of semi-hard magnetic materials. Instrum. Mater. 1971, 5, 46–50+39. (In Chinese) [Google Scholar]
- Bozorth, R.M. Appendix 4. Magnetic Properties of Various Materials. In Ferromagnetism; Wiley: Maitland, FL, USA, 1993; pp. 868–874. [Google Scholar] [CrossRef]
- Cardarelli, F. Materials Handbook: A Concise Desktop Reference, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- GB/T 14988-2008; Hysteresis Alloy. Standardization Administration of China: Beijing, China, 2008.
- Teymoor, G.; Ahmad, D.; Sanati, M.M. Hysteresis Motor Using Heat Treated Fe-Cr-Ni-Mo-C Steel Alloy. J. Electr. Syst. 2015, 11, 49–60. [Google Scholar]
- Wang, W.; Chen, Y.; Liu, Z. Effect of heat treatment on the properties and microstructure of a new FeCoV hysteresis alloy. South. Met. 2016, 3, 1–3. [Google Scholar]
- Cui, Y.; Su, Y.; Guo, Y. Study on improving hysteresis properties of 2J04 magnetic steel sheet. Missile Space Launch Technol. 2017, 1, 84–88. [Google Scholar]
- Yang, J.; Xie, J. Research on technology of improving magnetic properties of hysteresis motor. Manned Spacefl. 2006, 2, 22–25. [Google Scholar]
- Huang, H.Y. Study on a new type of FeCoV hysteresis alloy. Met. Funct. Mater. 2005, 2, 1–4. [Google Scholar]
- Milyaev, I.M.; Ostanin, S.Y.; Milyaev, A.I.; Laisheva, N.V.; Yusupov, V.S. Optimization of the Heat Treatment of a Hard Magnetic Fe–30Cr–16Co–1Ti Powder Alloy. Russ. Metall. (Metally) 2021, 2021, 1075–1080. [Google Scholar] [CrossRef]
- Milyaev, I.M.; Alymov, M.I.; Milyaev, A.I.; Yusupov, V.S.; Zelenskii, V.A.; Ustyukhin, A.S. Optimization of the Heat Treatment of a Hard Magnetic Fe–30Cr–16Co Powder Alloy. Russ. Metall. (Metally) 2021, 2021, 892–897. [Google Scholar] [CrossRef]
- Milyaev, I.M.; Abashev, D.M.; Alymov, M.I.; Buryakov, I.N.; Yusupov, V.S.; Zelenskii, V.A. Magnetic Properties of Hard Magnetic Powder Alloy Fe–27% Cr–10% Co (27Kh10KA). Met. Sci. Heat Treat. 2019, 61, 157–161. [Google Scholar] [CrossRef]
- Abashev, D.M.; Milyaev, I.M.; Alymov, M.I.; Buryakov, I.N.; Yusupov, V.S.; Zelenskii, V.A.; Laisheva, N.V. Magnetic Hysteretic Properties of a Powdered Fe–27Cr–10Co–1Mo Hard Magnetic Alloy. Russ. Metall. (Metally) 2018, 2018, 1041–1045. [Google Scholar] [CrossRef]
- Milyaev, I.M.; Yusupov, V.S.; Ostanin, S.Y.; Shumei, C.; Chunbo, C.; Milyaev, A.I.; Laisheva, N.V. Magnetic Hysteretic and Mechanical Properties of a 31Kh20K3M Alloy with an Increased Carbon Content. Russ. Metall. (Metally) 2018, 2018, 236–242. [Google Scholar] [CrossRef]
- Stel’mashok, S.I.; Milyaev, I.M.; Yusupov, V.; Milyaev, A.I. Magnetic and Mechanical Properties of Hard Magnetic Alloys 30Kh21K3M and 30Kh20K2M2V. Met. Sci. Heat Treat. 2017, 58, 622–627. [Google Scholar] [CrossRef]
- Mayergoyz, I. Mathematical Models of Hysteresis. IEEE Trans. Magn. 1986, 22, 603–608. [Google Scholar] [CrossRef] [Green Version]
- Cao, L.; Li, G. Complete Parallelogram Hysteresis Model for Electric Machines. IEEE Trans. Energy Convers. 2010, 25, 626–632. [Google Scholar] [CrossRef]
- Nasiri-Zarandi, R.; Mirsalim, M. Finite-Element Analysis of an Axial Flux Hysteresis Motor Based on a Complex Permeability Concept Considering the Saturation of the Hysteresis Loop. IEEE Trans. Ind. Appl. 2016, 52, 1390–1397. [Google Scholar] [CrossRef]
- Mayergoyz, I.; Friedman, G. Generalized Preisach model of hysteresis. IEEE Trans. Magn. 1988, 24, 212–217. [Google Scholar] [CrossRef]
- Mayergoyz, I.; Friedman, G.; Salling, C. Comparison of the classical and generalized Preisach hysteresis models with experiments. IEEE Trans. Magn. 1989, 25, 3925–3927. [Google Scholar] [CrossRef]
- Sjostrom, M. Frequency analysis of classical Preisach model. IEEE Trans. Magn. 1999, 35, 2097–2103. [Google Scholar] [CrossRef]
- Lu, M.; Leonard, P.; Marketos, P.; Meydan, T.; Moses, A. Dependence of dynamic Preisach distribution function on magnetizing frequencies. IEEE Trans. Magn. 2006, 42, 951–954. [Google Scholar] [CrossRef]
- Kuczmann, M.; Kovács, G. Improvement and Application of the Viscous-Type Frequency-Dependent Preisach Model. IEEE Trans. Magn. 2014, 50, 385–388. [Google Scholar] [CrossRef]
- Hussain, S.; Lowther, D.A. An Efficient Implementation of the Classical Preisach Model. IEEE Trans. Magn. 2018, 54, 7300204. [Google Scholar] [CrossRef]
- Marcsa, D.; Kuczmann, M. Direct Preisach Hysteresis Model for Finite Element Analysis of Magnetic Fields. Prz. Elektrotech. 2009, 85, 114–117. [Google Scholar]
- Jiles, D.; Thoelke, J. Theory of ferromagnetic hysteresis: Determination of model parameters from experimental hysteresis loops. IEEE Trans. Magn. 1989, 25, 3928–3930. [Google Scholar] [CrossRef]
- Jaafar, M.F.; Jabri, M.A. Study and modeling of ferromagnetic hysteresis. In Proceedings of the 2013 International Conference on Electrical Engineering and Software Applications, Hammamet, Tunisia, 21–23 March 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Šimon, G.; Molnár, J. The Jiles-Atherton Model of Ferromagnetic Materials and Its Dependence on the Anhysteretic Magnetization. J. Ind. Electr. Eng. 2021, 5. [Google Scholar]
- Nowicki, M.; Szewczyk, R.; Nowak, P. Experimental Verification of Isotropic and Anisotropic Anhysteretic Magnetization Models. Materials 2019, 12, 1549. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leite, J.V.; Benabou, A.; Sadowski, N. Accurate minor loops calculation with a modified Jiles-Atherton hysteresis model. Compel 2009, 28, 741–749. [Google Scholar] [CrossRef] [Green Version]
- Jiles, D.; Thoelke, J.; Devine, M. Numerical determination of hysteresis parameters for the modeling of magnetic properties using the theory of ferromagnetic hysteresis. IEEE Trans. Magn. 1992, 28, 27–35. [Google Scholar] [CrossRef]
- Khemani, V.; Azarian, M.H.; Pecht, M.G. Efficient Identification of Jiles-Atherton Model Parameters Using Space-Filling Designs and Genetic Algorithms. Eng 2022, 3, 364–372. [Google Scholar] [CrossRef]
- Li, H.; Li, Q.; Zhang, J. Calculation of Jiles-Atherton hysteresis model’s parameters using mix of chaos optimization algorithm and simulated annealing algorithm. In Proceedings of the 2009 International Conference on Microwave Technology and Computational Electromagnetics (ICMTCE 2009), Beijing, China, 3–6 November 2009; pp. 471–474. [Google Scholar] [CrossRef]
- Jiles, D.C. Frequency dependence of hysteresis curves in conducting magnetic materials. J. Appl. Phys. 1994, 76, 5849–5855. [Google Scholar] [CrossRef]
- Jiles, D. Frequency dependence of hysteresis curves in ’non-conducting’ magnetic materials. IEEE Trans. Magn. 1993, 29, 3490–3492. [Google Scholar] [CrossRef] [Green Version]
- Baghel, A.P.S.; Kulkarni, S.V. Dynamic Loss Inclusion in the Jiles–Atherton (JA) Hysteresis Model Using the Original JA Approach and the Field Separation Approach. IEEE Trans. Magn. 2014, 50, 369–372. [Google Scholar] [CrossRef]
- Raghunathan, A.; Melikhov, Y.; Snyder, J.E.; Jiles, D.C. Modeling the Temperature Dependence of Hysteresis Based on Jiles–Atherton Theory. IEEE Trans. Magn. 2009, 45, 3954–3957. [Google Scholar] [CrossRef]
- COMSOL. Vector Hysteresis Modeling. Available online: https://www.comsol.com/model/vector-hysteresis-modeling-20671 (accessed on 20 April 2023).
- Fallahnejad, M.; Afrakhte, H. The comparison of two approaches Jiles-Atherton and Preisach in simulating hysteresis cycle. In Proceedings of the 2015 2nd International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, Iran, 5–6 November 2015; pp. 710–713. [Google Scholar] [CrossRef]
- Sina Valadkhan, K.M.; Khajepour, A. Review and comparison of hysteresis models for magnetostrictive materials. J. Intell. Mater. Syst. Struct. 2009, 20, 131–142. [Google Scholar] [CrossRef]
- Benabou, A.; Clénet, S.; Piriou, F. Comparison of Preisach and Jiles–Atherton models to take into account hysteresis phenomenon for finite element analysis. J. Magn. Magn. Mater. 2003, 261, 139–160. [Google Scholar] [CrossRef]
- Jevons, M.; Bhargava, S. The salient-pole hysteresis coupling. IEEE Trans. Magn. 1975, 11, 1461–1463. [Google Scholar] [CrossRef]
- Bhargava, S.C. Theory of Hysteresis Coupling Torque. Electr. Mach. Power Syst. 1980, 5, 391–405. [Google Scholar] [CrossRef]
- Yamazaki, K.; Kokubu, S. Induction Motor Analysis by Considering Hysteresis Loops in Stator and Rotor. IEEE Trans. Magn. 2021, 57, 8203704. [Google Scholar] [CrossRef]
- Chang, L.; Jahns, T.M.; Blissenbach, R. Characterization and Modeling of Soft Magnetic Materials for Improved Estimation of PWM-Induced Iron Loss. IEEE Trans. Ind. Appl. 2020, 56, 287–300. [Google Scholar] [CrossRef]
- Du, R.; Robertson, P. Dynamic Jiles–Atherton Model for Determining the Magnetic Power Loss at High Frequency in Permanent Magnet Machines. IEEE Trans. Magn. 2015, 51, 7301210. [Google Scholar] [CrossRef]
- Lee, J.H.; Hyun, D.S. Hysteresis analysis for the permanent magnet assisted synchronous reluctance motor by coupled FEM and Preisach modelling. IEEE Trans. Magn. 1999, 35, 1203–1206. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Country/Region | Institution | Motor Type | Hysteresis Material | Application | Performance |
|---|---|---|---|---|---|---|
| 2019 | United States | Massachusetts Institute of Technology | Linear HM [4] | D2 Tool Steel, FeCrCo | Photoetching machine | 0.25 m/s, 6 N |
| 2017 | United States | Massachusetts Institute of Technology | Spherical HM [7] | D2 Tool steel, AlNiCo | Tricopter | 12,000 rpm, 8.9 mNm |
| 2017 | United States | Massachusetts Institute of Technology | Bearingless HM [15] | D2 Tool Steel | Blood pump | 1730 rpm, 2.7 mNm |
| 2017 | Italy | Polytechnic University of Turin | HM [9] | AlNiCo, CoFeNi, CoFeV, etc. | Electric turbochargers | 220 krpm |
| 2016 | Canada | Memorial University of Newfoundland | PMHM [12] | 36% cobalt steel | Electric submersible pump | 2.5 kW, ≥10 Nm |
| 1997 | Canada | Memorial University of Newfoundland | PMHM [16] | 36% cobalt steel | Electric vehicles | 1800 rpm, 4 Nm |
| 2016 | China | Tianjin University | External rotor HM [17] | 2J4 | Liquid float gyro | 12,000 rpm, 2 mNm |
| 2007 | Iran | Shahrud University of Technology | Axial flux HM [18] | - | - | 60,000 rpm, 50 mNm |
| 2016 | Iran | Amir Kabir University of Technology | HM with hybrid flux [19] | Mn-Zn ferrite, silicon steel, nickel steel | - | 3000 rpm, 20 mNm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, B.; Cheng, Y.; Zhao, T.; Sun, H.; Cui, S. A Review on Analysis Methods and Research Status of Hysteresis Motor. Energies 2023, 16, 5715. https://doi.org/10.3390/en16155715
Gao B, Cheng Y, Zhao T, Sun H, Cui S. A Review on Analysis Methods and Research Status of Hysteresis Motor. Energies. 2023; 16(15):5715. https://doi.org/10.3390/en16155715
Chicago/Turabian StyleGao, Bo, Yuan Cheng, Tianxu Zhao, Haodong Sun, and Shumei Cui. 2023. "A Review on Analysis Methods and Research Status of Hysteresis Motor" Energies 16, no. 15: 5715. https://doi.org/10.3390/en16155715
APA StyleGao, B., Cheng, Y., Zhao, T., Sun, H., & Cui, S. (2023). A Review on Analysis Methods and Research Status of Hysteresis Motor. Energies, 16(15), 5715. https://doi.org/10.3390/en16155715