
Analysis on Rotor Vibration Characteristics under Dynamic Rotor Interturn Short Circuit Fault in Synchronous Generators




Abstract
:1. Introduction
- (1)
- The refined model of the DRISC fault is established by mathematical derivation based on the fault characteristics.
- (2)
- The rotor vibration characteristics are comprehensively analyzed in detail based on the DRISC model by the time–frequency analysis method. In addition, the mechanical responses of the rotor are obtained under the DRSIC fault.
- (3)
- A specific test method is designed and implemented to simulate the DRISC fault.
2. Theoretical Analysis
2.1. Impact of DRISC on MFD
2.2. Impact of DRISC on UMP
3. FEA and Experimental Validation
3.1. FEA and Experimental Setup
3.2. Results and Discussion
4. Conclusions
- (1)
- Compared with the normal condition, the air-gap MFD decreases under the DRISC fault, and the DRISC generates additional even harmonics. As the short circuit intensifies, the amplitudes of the odd harmonics decrease while the amplitudes of the even harmonics increase in the MFD spectrum.
- (2)
- The rotor UMP rapidly increases and contains the first component as the DRISC takes place. And the UMP of the rotor increases with the increase in the short circuit degree. Correspondingly, the first harmonic amplitude of the rotor vibration response increases. In addition, the mechanical response of the rotor, which is caused by the UMP, is obtained when the dangerous position in the rotor winding is identified.
- (3)
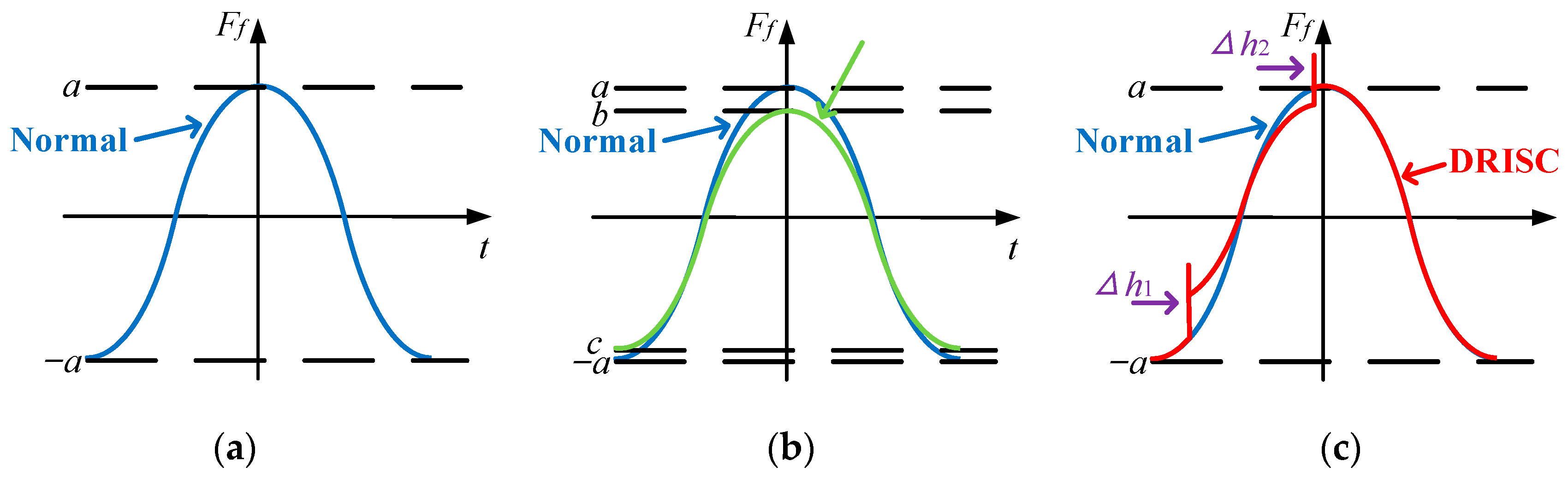
- Compared with the SRISC, the UMP curve under the DRISC fault shows two distinct “spikes”, which are higher as the DRISC degree increases. The UMP of the rotor under the DRISC is equivalent to superimposing a pulse signal on top of the original rotor’s magnetic pull.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| RISC | Rotor interturn short circuit |
| DRISC | Dynamic rotor interturn short circuit |
| SRISC | Static rotor interturn short circuit |
| UMP | Unbalanced magnetic pull |
| MFD | Magnetic flux density |
| MMF | Magnetomotive force |
| PPUA | Permeance per unit area |
| FEA | Finite element analysis |
References
- Li, Y.; Liu, Y.; Liu, H. Analysis of Torsional Dynamic Characteristics of Turbo-Generator Rotor Based on Cross Scale Modeling Method. J. Vib. Eng. Technol. 2022, 10, 1055–1072. [Google Scholar] [CrossRef]
- Zhou, F.; Xu, P.; Bai, X. Optimal Layout Method of Multiple Vibration Sensors Based on Motor Vibration Frequency Response. J. Vib. Eng. Technol. 2023, 11, 683–697. [Google Scholar] [CrossRef]
- Bai, W.; Zhou, X.; Wang, Y.; Zeng, Q.; Zhan, S.; Hua, X.; Ge, B. Vibration Analysis of the Electric Drive System with Inter-turn Short-Circuit and Gear Spalling Faults. J. Vib. Eng. Technol. 2022. [Google Scholar] [CrossRef]
- Naderi, P.; Shiri, A. Rotor/Stator Inter-Turn Short Circuit Fault Detection for Saturable Wound-Rotor Induction Machine by Modified Magnetic Equivalent Circuit Approach. IEEE Trans. Magn. 2017, 53, 8107013. [Google Scholar] [CrossRef]
- Šašić, M.; Lloyd, B.; Elez, A. Finite Element Analysis of Turbine Generator Rotor Winding Shorted Turns. IEEE Trans. Energy Convers. 2012, 27, 930–937. [Google Scholar] [CrossRef]
- Shifat, T.A.; Hur, J.W. An Effective Stator Fault Diagnosis Framework of BLDC Motor Based on Vibration and Current Signals. IEEE Access 2020, 8, 106968–106981. [Google Scholar] [CrossRef]
- Yuan, X.; He, Y.; Liu, M.; Wang, H.; Wan, S.; Gaurang, V. Impact of the Field Winding Interturn Short-Circuit Position on Rotor Vibration Properties in Synchronous Generators. Math. Probl. Eng. 2021, 2021, 9236726. [Google Scholar] [CrossRef]
- Hao, L.; Sun, Y.; Qiu, A.; Wang, X. Steady-State Calculation and Online Monitoring of Interturn Short Circuit of Field Windings in Synchronous Machines. IEEE Trans. Energy Convers. 2012, 27, 128–138. [Google Scholar] [CrossRef]
- Wu, Y.; Ma, M.; Li, Y. A New Detection Coil Capable of Performing Online Diagnosis of Excitation Winding Short-Circuits in Steam-Turbine Generators. IEEE Trans. Energy Convers. 2018, 33, 106–115. [Google Scholar]
- Hou, J.; Li, H.; Li, J.; Wang, H.; Hua, J. Influence on Field Magnetic Motive Force of Turbo-generator with Field Winding Inter-turn Short Circuits at Different Position. Proc. Chin. Soc. Electr. Eng. 2011, 31, 123–129. [Google Scholar]
- Wu, Y.; Li, Y. Field Winding Short Circuit Fault Diagnosis Within Turbine Generators Based on Power Expectation Principle. Proc. Chin. Soc. Electr. Eng. 2014, 34, 5934–5940. [Google Scholar]
- Wu, Y.; Li, Y. Diagnosis of Rotor Winding Interturn Short-Circuit in Turbine Generators Using Virtual Power. IEEE Trans. Energy Convers. 2015, 30, 183–188. [Google Scholar]
- He, Y.L.; Wang, Y.; Jiang, H.; Gao, P.; Yuan, X.; Gerada, D.; Liu, X. A Novel Universal Model Considering SAGE for MFD-Based Faulty Property Analysis Under RISC in Synchronous Generators. IEEE Trans. Ind. Electron. 2022, 69, 7415–7427. [Google Scholar] [CrossRef]
- Wu, Y.; Li, Y.; Li, H. Diagnosis of Non-Salient Pole Synchronous Generator Rotor’s Typical Faults Based on Shaft Voltage. Trans. China Electrotech. Soc. 2010, 25, 178–184. [Google Scholar]
- Wan, S.; He, Y.; Tang, G.; Li, Y. Analysis on Stator Circulating Current Characteristics Under Rotor Short Circuit Faults of Turbo-generator. High Volt. Eng. 2010, 36, 987–993. [Google Scholar]
- Wan, S.; Li, Y. Influence of Factors Affecting Rotor Winding Inter-Turn Short Circuit on Generator Vibrations. J. Vib. Meas. Diagn. 2008, 28, 131–134+181. [Google Scholar]
- Wan, S.; Li, H.; Li, Y. Analysis of Generator Vibration Characteristic on Rotor Winding Inter-turn Short Circuit Fault. Proc. Chin. Soc. Electr. Eng. 2005, 25, 122–126. [Google Scholar]
- Zhou, G.; Li, Y.; Wan, S.; Zhang, Y.; Li, H. Analysis on Rotor Unbalanced Electromagnetic Force of Generator under Rotor Interturn Short Circuit Fault. Trans. China Electrotech. Soc. 2012, 27, 120–127. [Google Scholar]
- Li, Y.; Hao, L.; Sun, Y.; Wang, X.; Wu, J.; Zhang, G. Characteristic Analysis of Unbalanced Magnetic Pull Caused by Non-salient Pole Synchronous Generator Rotor Inter-turn Short Circuit Fault. Autom. Electr. Power Syst. 2016, 40, 81–89. [Google Scholar]
- Zhang, G.; Wu, J.; Li, Y.; Hao, L. Analytic calculation model of unbalanced rotor magnetic pull for non-salient pole generator with rotor inter-turn short circuit. Electr. Power Autom. Equip. 2016, 36, 129–136. [Google Scholar]
- Wu, Y.; Ma, M.; Li, Y.; Wang, L. Vibration characteristic analysis of rotor in excitation winding inter-turn short circuit state of turbo generator. IEEJ Trans. Electr. Electron. Eng. 2019, 14, 933–942. [Google Scholar]
- Riegler, S.; Bíró, O.; Wallinger, G. A Transient Current Vector Potential to Consider the Rotor Excitation of Synchronous Machines Under Short Circuit Condition. IEEE Trans. Magn. 2015, 51, 8101204. [Google Scholar] [CrossRef]
- Wu, Y.; Feng, W.; Li, Y.; Zhang, W. Steady-state Electromagnetic Characteristics of Turbine Generator After Field Winding Short-circuit Fault. High Volt. Eng. 2014, 40, 1567–1573. [Google Scholar]
- Wan, S.; Peng, B. Electromagnetic torque characteristic identification among static air-gap eccentricity and rotor interturn short circuit. Chin. J. Constr. Mach. 2021, 19, 65–71. [Google Scholar]
- Hao, L.; Wu, J.; Zhou, Y. Theoretical Analysis and Calculation Model of the Electromagnetic Torque of Nonsalient-Pole Synchronous Machines with Interturn Short Circuit in Field Windings. IEEE Trans. Energy Convers. 2015, 30, 110–121. [Google Scholar] [CrossRef]
- Obeid, N.H.; Boileau, T.; Nahid, M.B. Modeling and Diagnostic of Incipient Interturn Faults for a Three-Phase Permanent Magnet Synchronous Motor. IEEE Trans. Ind. Appl. 2016, 52, 4426–4434. [Google Scholar] [CrossRef]
- Li, J. Research on Dynamic Interturn Short Circuit Fault Location of Exciting Winding in Turbine Generators. Proc. Chin. Soc. Electr. Eng. 2015, 35, 1775–1781. [Google Scholar]
- Obeid, N.H.; Battiston, A.; Boileau, T.; Nahid, M.B. Early Intermittent Interturn Fault Detection and Localization for a Permanent Magnet Synchronous Motor of Electrical Vehicles Using Wavelet Transform. IEEE Trans. Transp. Electrif. 2017, 3, 694–702. [Google Scholar] [CrossRef]
- Konstantinos, N.G.; Antonio, J.M.C. Reliable Detection of Stator Interturn Faults of Very Low Severity Level in Induction Motors. IEEE Trans. Ind. Electron. 2021, 68, 3475–3484. [Google Scholar]
- Fatima, H.; Jeevanand, S. Incipient Interturn Fault Detection and Severity Evaluation in Electric Drive System Using Hybrid HCNN-SVM Based Model. IEEE Trans. Ind. Inform. 2022, 18, 1823–1832. [Google Scholar]
- Singh, M.; Shaik, A.G. Incipient Fault Detection in Stator Windings of an Induction Motor Using Stockwell Transform and SVM. IEEE Trans. Instrum. Meas. 2020, 69, 9496–9504. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| rated power (kVA) | 5 | stator core length (mm) | 130 |
| pole pairs | 1 | stator coil turns per slot | 22 |
| power factor (cos φ) | 0.8 | rotor slots | 16 |
| radial air-gap length (mm) | 1.2 | rotor core outer diameter (mm) | 142.6 |
| stator slots | 36 | rotor core inner diameter (mm) | 40 |
| stator outer diameter (mm) | 250.5 | rotor coil turns per slot | 60 |
| stator inner diameter (mm) | 145 | internal power factor (cos ψ) | 0.62 |
| Cases | Deformation Response (10−6) (m) | Strain Response (10−5) (m/m) | Stress Response (106) (Pa) |
|---|---|---|---|
| Normal | 5.7604 | 8.5297 | 3.8383 |
| DRISC-5% | 6.0412 | 8.9716 | 4.0371 |
| DRISC-10% | 6.2120 | 9.1346 | 4.1105 |
| SRISC-5% | 6.4728 | 9.2035 | 4.1415 |
| SRISC-10% | 6.9618 | 10.0340 | 4.5153 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Y.; Jiang, M.; Sun, K.; Qiu, M.; Gerada, D. Analysis on Rotor Vibration Characteristics under Dynamic Rotor Interturn Short Circuit Fault in Synchronous Generators. Energies 2023, 16, 6585. https://doi.org/10.3390/en16186585
He Y, Jiang M, Sun K, Qiu M, Gerada D. Analysis on Rotor Vibration Characteristics under Dynamic Rotor Interturn Short Circuit Fault in Synchronous Generators. Energies. 2023; 16(18):6585. https://doi.org/10.3390/en16186585
Chicago/Turabian StyleHe, Yuling, Mengya Jiang, Kai Sun, Minghao Qiu, and David Gerada. 2023. "Analysis on Rotor Vibration Characteristics under Dynamic Rotor Interturn Short Circuit Fault in Synchronous Generators" Energies 16, no. 18: 6585. https://doi.org/10.3390/en16186585
APA StyleHe, Y., Jiang, M., Sun, K., Qiu, M., & Gerada, D. (2023). Analysis on Rotor Vibration Characteristics under Dynamic Rotor Interturn Short Circuit Fault in Synchronous Generators. Energies, 16(18), 6585. https://doi.org/10.3390/en16186585