
Comparative Study of AVR Control Systems Considering a Novel Optimized PID-Based Model Reference Fractional Adaptive Controller



Abstract
:1. Introduction
2. Literature Review
2.1. PID-Based AVR Dynamic System Model
2.2. PIDA-Based AVR Dynamic System Model
2.3. FOPID-Based AVR Dynamic System Model
2.4. FAPID-Based AVR Dynamic System Model
3. Mathematical Modeling
3.1. Mathematical Background
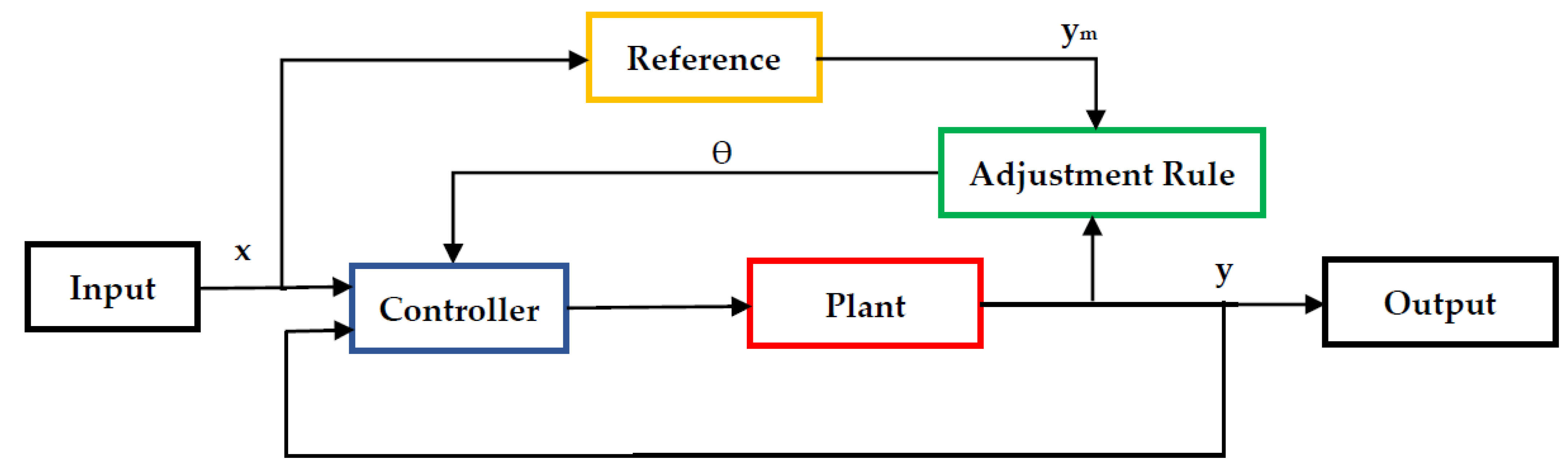
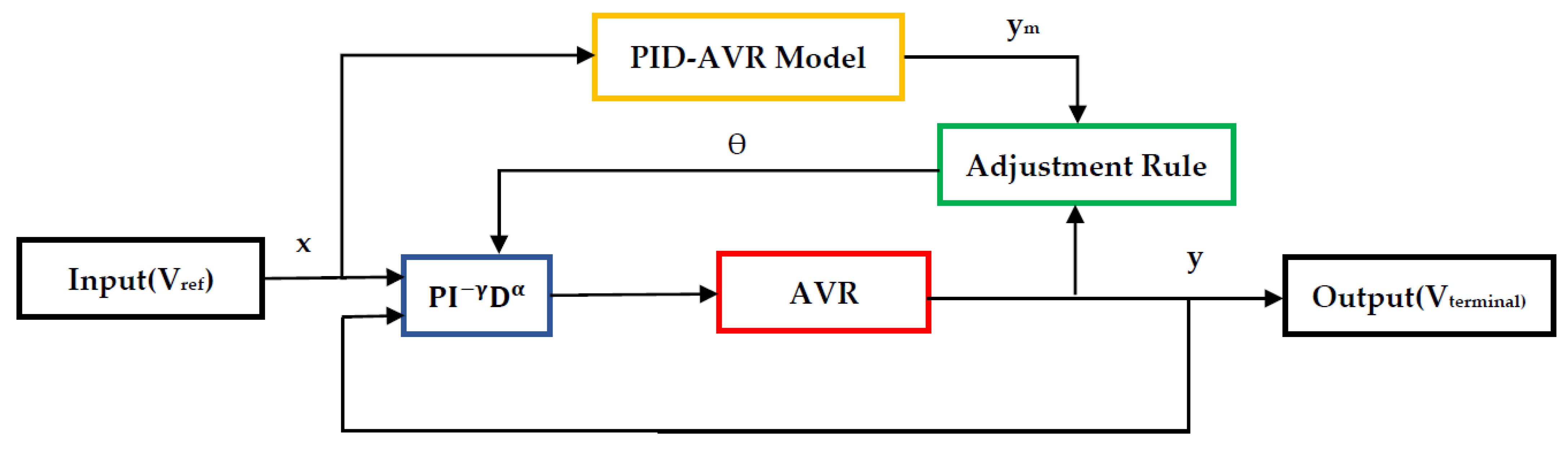
3.2. OPIDMR-FA-Based AVR Dynamic System Model
4. Results and Discussion
4.1. Case Study 1
4.2. Case Study 2
4.3. Case Study 3
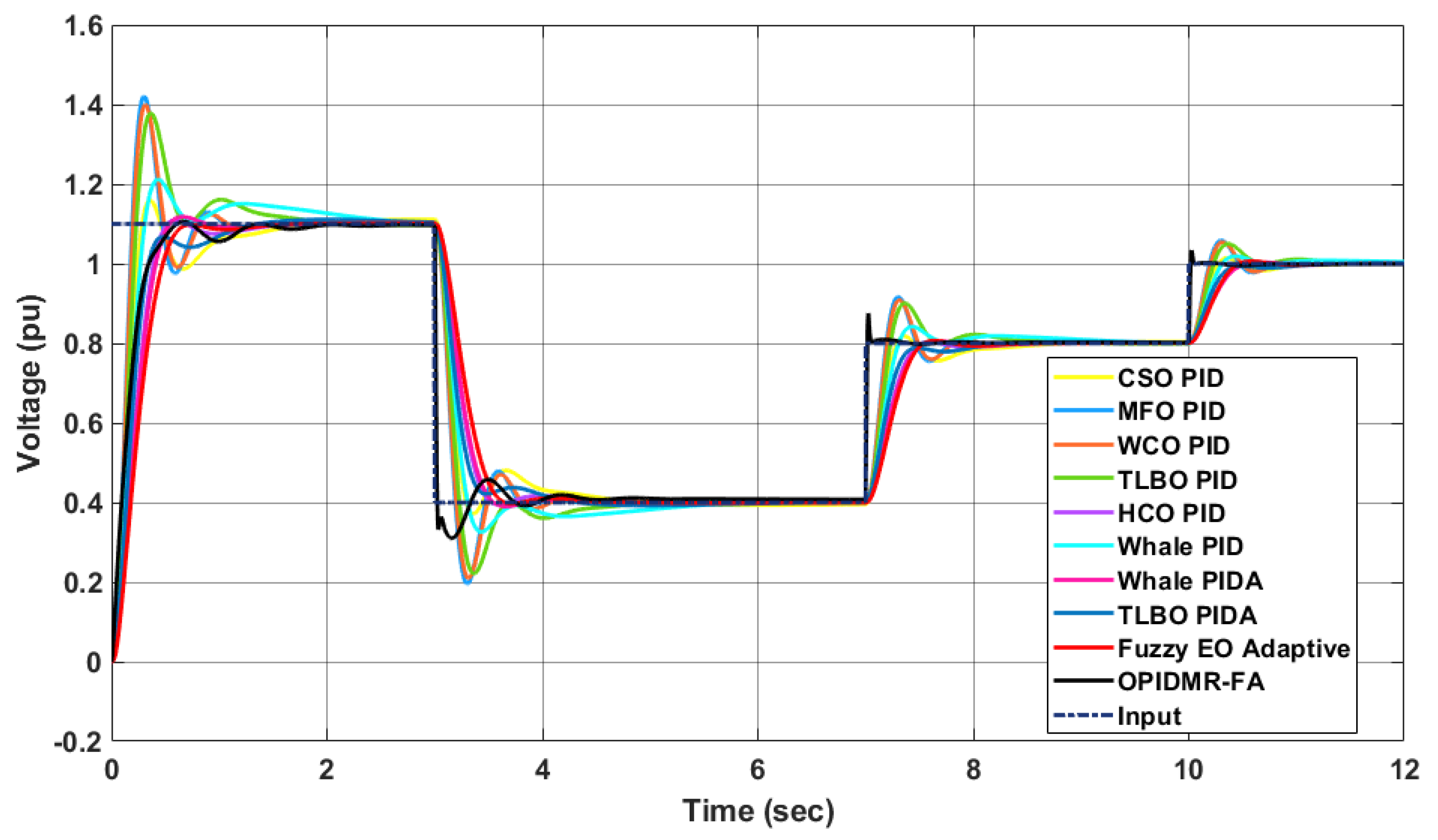
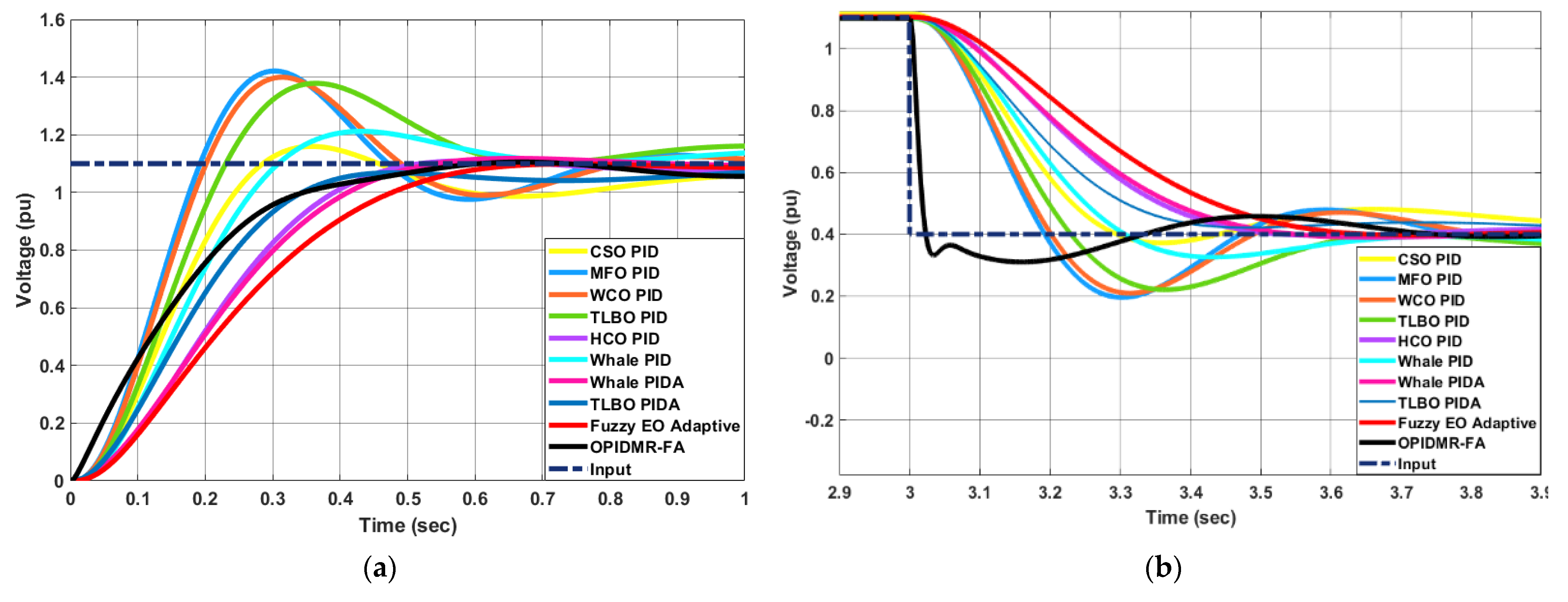
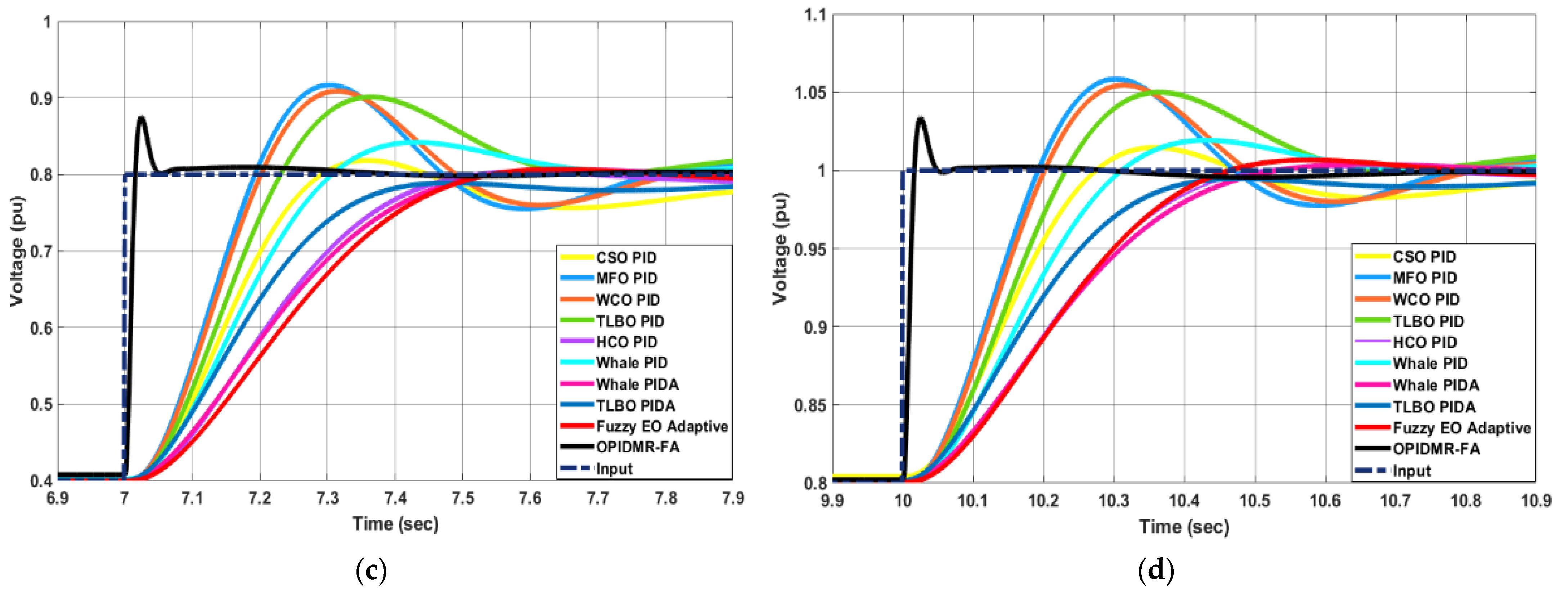
4.4. Case Study 4
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ula, A.; Hasan, A. Design and implementation of a personal computer based automatic voltage regulator for a synchronous generator. IEEE Trans. Energy Convers. 1992, 7, 125–131. [Google Scholar] [CrossRef]
- Kiam, A.H.; Chong, G.; Yun, L. PID control system analysis, design, and technology. IEEE Trans. Control Syst. Technol. 2005, 13, 559–576. [Google Scholar] [CrossRef] [Green Version]
- Petras, I. The fractional—Order controllers: Methods for their synthesis and application. Electr. Eng. J. 1999, 50, 284–288. [Google Scholar]
- Godjevac, J. Comparison between PID and fuzzy control. In Ecole Polytechnique Fédérale de Lausanne, Département d’Informatique, Laboratoire de Microinformatique, Internal Report 93; Ecole Polytechnique Fédérale de Lausanne: Lausanne, Switzerland, 1997. [Google Scholar]
- Mallesham, G.; Rajani, A. Automatictuning of PID controller using fuzzy logic. In Proceedings of the 8th International Conference on Development and Application Systems, Suceava, Romania, 25–27 May 2006. [Google Scholar]
- Jung, S.; Dorf, R. Analytic PIDA Controller Design Technique for A Third Order System. In Proceedings of the 35th Conference on Decision and Control Kobe, Kobe, Japan, 13 December 1996; Volume 3, pp. 2513–2518. [Google Scholar]
- Kumar, V.; Mittal, A.P. Parallel fuzzy P + fuzzy I + fuzzy D controller: Design and performance evaluation. Int. J. Autom. Comput. 2010, 7, 463–471. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems; University Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Goldberg, D.E. Genetic Algorithms in Search Optimization and Machine Learning; Addison Wesley Publishers: Edmonton, AB, Canada, 1989. [Google Scholar]
- Bhati, S.; Nitnawwre, D. Genetic Optimization Tuning of an Automatic Voltage Regulator System. Int. J. Sci. Eng. Technol. 2012, 1, 120–124. [Google Scholar]
- Divya, K.; Seshadri, G. GA-PID tuned Stabilizer AVR system for Synchronous Generators. Int. J. Innov. Technol. 2015, 3, 438–442. [Google Scholar]
- Oonsivilai, A.; Pao-La-Or, P. Application of Adaptive Tabu Search for Optimum PID Controller Tuning AVR System. WSEAS Trans. Power Syst. 2008, 6, 495–506. [Google Scholar]
- Puangdownreong, D.; Sujitjorn, S.; Kulworawanichpong, T. Convergence Analysis of Adaptive Tabu Search. Int. J. Sci. Asia 2004, 38, 183–190. [Google Scholar] [CrossRef]
- Chaiyaratana, C.; Zalzala, A.M.S. Recent Developments in Evolutionary and Genetic Algorithms: Theory and Applications. In Proceedings of the 2nd International Conference on Genetic Algorithms in Engineering System: Innovations and Applications, Glasgow, UK, 2–4 September 1997; Volume 2, pp. 270–277. [Google Scholar]
- Puangdownreong, D.; Areerak, K.-N.; Srikaew, A.; Sujitjorn, S.; Totarong, P. System Identification via Adaptive Tabu Search. In Proceedings of the 2002 IEEE International Conference on Industrial Technology, Bankok, Thailand, 11–14 December 2002; Volume 2, pp. 915–920. [Google Scholar]
- Puangdownreong, D. Multiobjective Multipath Adaptive Tabu Search for Optimal PID Controller Design. Int. J. Intell. Syst. Appl. 2015, 7, 51–58. [Google Scholar] [CrossRef] [Green Version]
- Sujitjorn, S.; Kulworawanichpong, T. Adaptive Tabu Search and Applications in Engineering Design. In Artificial Intelligent and Applications; IOS Press: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Deacha, P.; Jukkrit, K.; Sarawut, S. Multipath adaptive Tabu search: Its convergence and application to identification problem. J. Phys. Sci. 2012, 7, 5288–5296. [Google Scholar]
- Auttarat, N.; Tunyasrirut, S.; Puangdownreong, D. Application of intensified current search to optimum PID controller design in AVR system. In Asian Simulation Conference; Springer: Berlin/Heidelberg, Germany, 2014; pp. 255–266. [Google Scholar]
- Madasamy, G.; Ravichandran, C. Optimal Tuning of PID controller by Bat Algorithm in an Automatic Voltage Regulator System. Int. J. Innov. Sci. Eng. Technol. 2015, 2, 336–339. [Google Scholar]
- Yang, X. A New Meta-Heuristic Bat-Inspired Algorithm; González, J.R., et Pelta, D.A., Cruz, C., Terrazas, G., Krasnogor, N., Eds.; NICSO 2010: Granada, Spain, 2010; pp. 65–74. [Google Scholar]
- Sambariya, D.; Gupta, R.; Prasad, R. Design of optimal input-output scaling factors based fuzzy PSS using bat algorithm. Eng. Sci. Technol. Int. J. 2016, 19, 991–1002. [Google Scholar] [CrossRef] [Green Version]
- Fister, I., Jr.; Fong, S.; Brest, J. A novel hybrid self-adaptive bat algorithm. Sci. World J. 2014, 2014, 12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sambariya, D.K.; Manohar, H. Model order reduction by integral squared error minimization using bat algorithm. In Proceedings of the IEEE 2015 RAECS UIET Panjab University Chandigarh, Chandigarh, India, 21–22 December 2015; pp. 1–7. [Google Scholar]
- Gaing, Z.L. A particle swarm optimization approach for optimum design of PID controller in AVR system. IEEE Trans. Energy Convers. 2004, 19, 384–391. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Network, Perth, WA, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the Congress on Evolutionary Computation, Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Kashki, M.; Abdel-Magid, Y.L.; Abido, M.A. A reinforcement learning automata optimization approach for optimum tuning of PID controller in AVR system. In International Conference on Intelligent Computing; Springer: Berlin/Heidelberg, Germany, 2008; pp. 684–692. [Google Scholar]
- Howell, M.; Best, M. On-Line PID Tuning for Engine Idle-Speed Control Using Continuous Action Reinforcement Learning Automata. Control Eng. Pract. 2000, 8, 147–154. [Google Scholar] [CrossRef] [Green Version]
- Howell, M.; Gordon, T. Continuous Action Reinforcement Learning Automata and their Application to Adaptive Digital Filter Design. Eng. Appl. Artif. Intell. 2001, 14, 549–562. [Google Scholar] [CrossRef]
- Kashki, M.; Abdel-Magid, Y.; Abido, M. Application of novel reinforcement learning automata approach in power system regulator. J. Circuits Syst. Comput. 2009, 18, 1609–1625. [Google Scholar] [CrossRef]
- Hwang, C.C.; Lyu, L.Y.; Liu, C.T.; Li, P.L. Optimal design of an SPM motor using genetic algorithms and Taguchi method. IEEE Trans. Magn. 2008, 44, 4325–4328. [Google Scholar] [CrossRef]
- Hasanien, H.M. Design Optimization of PID Controller in Automatic Voltage Regulator System Using Taguchi Combined Genetic Algorithm Method. IEEE Trans. 2012, 7, 825–831. [Google Scholar] [CrossRef]
- Shayeghi, H.; Dadashpour, J. Anarchic Society Optimization Based PID Control of an Automatic Voltage Regulator (AVR) System. Electr. Electron. Eng. 2012, 2, 199–207. [Google Scholar] [CrossRef] [Green Version]
- Ahmadi-Javid, A. Anarchic society optimization: A human-inspired method, Applied Soft Computing. In Proceedings of the IEEE Congress on Evolutionary Computation, New Orleans, LA, USA, 5–8 June 2011; pp. 2586–2592. [Google Scholar]
- Gozde, H.; Taplamacioglu, M.; Kocaarslan, I. Application of Artificial Bees Colony algorithm in an Automatic Voltage Regulator (AVR) system. Int. J. Tech. Phys. Probl. Eng. 2010, 2, 88–92. [Google Scholar]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Technical Report-TR06; Erciyes University of Engineering, Faculty of Computer Engineering Department: Kayseri, Turkey, 2005. [Google Scholar]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numeric optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 3, 459–471. [Google Scholar] [CrossRef]
- Gozde, H.; Taplamacioglu, M. Comparative performance analysis of artificial bee colony algorithm for automatic voltage regulator (AVR) system. J. Frankl. Inst. 2011, 348, 1927–1946. [Google Scholar] [CrossRef]
- Li, C.; Li, H.; Kou, P. Piecewise function based gravitational search algorithm and its application on parameter identification of AVR system. Neurocomputing 2014, 124, 139–148. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Duman, S.; Yörükeren, N.; Altaş, İ.H. Gravitational search algorithm for determining controller parameters in an automatic voltage regulator system. Turk. J. Electr. Eng. Comput. Sci. 2016, 24, 2387–2400. [Google Scholar] [CrossRef] [Green Version]
- Panda, S.; Sahu, B.; Mohanty, P. Design and performance analysis of PID controller for an automatic voltage regulator system using simplified particle swarm optimization. J. Frankl. Inst. 2012, 349, 2609–2625. [Google Scholar] [CrossRef]
- Pedersen, M.; Chipperfield, A. Simplifying particle swarm optimization. Appl. Soft Comput. 2010, 10, 618–628. [Google Scholar] [CrossRef]
- Alfi, A.; Modares, H. System identification and control using adaptive particle swarm optimization. Appl. Math. Model. 2011, 35, 1210–1221. [Google Scholar] [CrossRef]
- Nirmal, J.F.; Auxillia, D.J. Adaptive PSO based Tuning of PID Controller for an Automatic Voltage Regulator System. In Proceedings of the 2013 International Conference on Circuits, Power and Computing Technologies (ICCPCT), Nagercoil, India, 20–21 March 2013. [Google Scholar]
- Mohanty, P.K.; Sahu, B.K.; Panda, S.; Kar, S.K.; Mishra, N. Performance Analysis and Design of Proportional Integral Derivative Controlled Automatic Voltage Regulator System Using Local Unimodal Sampling Optimization Technique. In International Conference on Swarm, Evolutionary, and Memetic Computing; Springer: Berlin/Heidelberg, Germany, 2012; pp. 566–576. [Google Scholar]
- Pedersen, M.E.H.; Field, A.J.C. Local Unimodal Sampling; Technical Report number HL0801; Hvass Laboratories, 2008. [Google Scholar]
- Bendjeghaba, O.; Boushaki, S. Optimal Tuning of PID Controller in Automatic Voltage Regulator System using Improved Harmony Search Algorithm. In Proceedings of the 7th Global Conference on Power Control and Optimization, Prague, Czech, 25 August 2013. [Google Scholar]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Yadav, P.; Kumar, R.; Panda, S.; Chang, C. An intelligent tuned harmony search algorithm for optimization. Inf. Sci. 2012, 196, 47–72. [Google Scholar] [CrossRef]
- Fourie, J.; Mills, S.; Green, R. Harmony filter: A robust visual tracking system using the improved harmony search algorithm. Image Vis. Comput. 2010, 28, 1702–1716. [Google Scholar] [CrossRef]
- Pachauri, N. Water cycle algorithm-based PID controller for AVR. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2020, 39, 551–567. [Google Scholar] [CrossRef]
- Rais, M.C.; Dekhandji, F.Z.; Recioui, A.; Rechid, M.S.; Djedi, L. Comparative Study of Optimization Techniques Based PID Tuning for Automatic Voltage Regulator System. Eng. Proc. 2022, 14, 21. [Google Scholar]
- Rao, R.; Savsani, V.; Vakharia, D. Teaching-learning based optimization: A novel optimization method for continuous non-linear large scale problems. Inf. Sci. J. 2012, 183, 1–15. [Google Scholar] [CrossRef]
- Priyambada, S.; Mohanty, P.; Sahu, B. Automatic Voltage Regulator using TLBO algorithm optimized PID controller. In Proceedings of the 9th International Conference on Industrial and Information Systems, Gwalior, India, 15–17 December 2014. [Google Scholar]
- Chatterjee, S.; Mukherjee, V. PID controller for automatic voltage regulator using teaching–learning based optimization technique. Electr. Power Energy Syst. 2016, 77, 418–429. [Google Scholar] [CrossRef]
- Juang, C.F. A hybrid of genetic algorithm and particle swarm optimization for recurrent network design. IEEE Trans. Syst. Man Cybern. Part B 2004, 34, 997–1006. [Google Scholar] [CrossRef]
- Kim, D.H.; Park, J.I. Intelligent PID Controller Tuning of AVR System Using GA and PSO. In International Conference on Intelligent Computing; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Kim, D.; Cho, J. A Biologically Inspired Intelligent PID Controller Tuning for AVR Systems. Int. J. Control Autom. Syst. 2006, 4, 624–636. [Google Scholar] [CrossRef]
- Passino, K.M. Biomimicry of Bacterial Foraging for Distributed Optimization; University Press: Princeton, NJ, USA, 2001. [Google Scholar]
- Kim, D.H.; Cho, J.H. Intelligent control of AVR system using GA-BF. In Lecture Notes in Computer Science Proceeding of Springer Melbourne; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Kansit, S.; Assawinchaichote, W. Optimization of PID Controller based on PSOGSA for an Automatic Voltage Regulator System. Procedia Comput. Sci. 2016, 86, 87–90. [Google Scholar] [CrossRef] [Green Version]
- Mirjalili, S.; Hashim, S.Z.M. A New Hybrid PSOGSA Algorithm for Function Optimization. In Proceedings of the Computer and Information Application (ICCIA), Tianjin, China, 3–5 December 2010; pp. 374–377. [Google Scholar]
- Fayek, H.H.; Rusu, E. Novel Combined Load Frequency Control and Automatic Voltage Regulation of a 100% Sustainable Energy Interconnected Microgrids. Sustainability 2022, 14, 9428. [Google Scholar] [CrossRef]
- Dehghani, M.; Mardaneh, M.; Guerrero, J.M.; Malik, O.P.; Ramirez-Mendoza, R.A.; Matas, J.; Vasquez, J.C.; Parra-Arroyo, L. A new “Doctor and Patient” optimization algorithm: An application to energy commitment problem. Appl. Sci. 2020, 10, 5791. [Google Scholar] [CrossRef]
- Oladipo, S.; Sun, Y.; Wang, Z. An effective hFPAPFA for a PIDA-based hybrid loop of load frequency and terminal voltage regulation system. In Proceedings of the 2021 IEEE PES/IAS PowerAfrica, Nairobi, Kenya, 23–27 August 2021; pp. 1–5. [Google Scholar]
- Abdel-Basset, M.; Shawky, L.A. Flower pollination algorithm: A comprehensive review. Artif. Intell. Rev. 2019, 52, 2533–2557. [Google Scholar] [CrossRef]
- Yapici, H.; Cetinkaya, N. A new meta-heuristic optimizer: Pathfinder algorithm. Appl. Soft Comput. 2019, 78, 545–568. [Google Scholar] [CrossRef]
- Puangdownreong, D. Application of Current Search to Optimum PIDA Controller Design. Intell. Control Autom. 2012, 03, 303–312. [Google Scholar] [CrossRef] [Green Version]
- Sakulin, A.; Puangdownreong, D. A Novel Meta- Heuristic Optimization Algorithm: Current Search. In Proceedings of the 11th WSEAS International Conference on Artificial Intelligence, Knowledge Engineering and Data Bases (AIKED’ 12), Cambridge, UK, 22–24 February 2012; pp. 125–130. [Google Scholar]
- Sambariya, D.; Paliwal, D. Design of PIDA Controller Using Bat Algorithm for AVR Power System. Adv. Energy Power 2016, 4, 1–6. [Google Scholar] [CrossRef]
- Sambariya, D.; Paliwal, D. Optimal design of PIDA controller using harmony search algorithm for AVR power system. In Proceedings of the 6th IEEE International Conference on Power Systems, New Delhi, India, 4–6 March 2016. [Google Scholar]
- Zamani, M.; Karimi-Ghartemani, M.; Sadati, N.; Parniani, M. Design of a fractional order PID controller for an AVR using particle swarm optimization. Control Eng. Pract. 2009, 17, 1380–1387. [Google Scholar] [CrossRef]
- Li, X.; Wang, Y.; Li, N.; Han, M.; Tang, Y.; Liu, F. Optimal fractional order PID controller design for automatic voltage regulator system based on reference model using particle swarm optimization. Int. J. Mach. Learn. Cybern. 2016, 8, 1595–1605. [Google Scholar] [CrossRef]
- Babu, G.S.; Dinesh, K. Implementation of Fractional Order PID Controller for an AVR System. In Proceedings of the 2015 International Conference on Energy, Power and Environment: Towards Sustainable Growth (ICEPE), Shillong, India, 12–13 June 2015. [Google Scholar]
- Colorni, A.; Dorigo, M.; Maniezzo, V. Distributed optimization by ant colonies. In Proceedings of the First European Conference on Artificial Life, Milano, Italy, 11 December 1991; pp. 134–142. [Google Scholar]
- Micev, M.; Ćalasan, M.; Oliva, D. Fractional order PID controller design for an AVR system using Chaotic Yellow Saddle Goatfish Algorithm. Mathematics 2020, 8, 1182. [Google Scholar] [CrossRef]
- Coelho, L.D.S. Tuning of PID controller for an automatic regulator voltage system using chaotic optimization approach. Chaos Solitons Fractals 2009, 39, 1504–1514. [Google Scholar] [CrossRef]
- Paliwal, N.; Srivastava, L.; Pandit, M. Rao algorithm based optimal Multi-term FOPID controller for automatic voltage regulator system. Optim. Control Appl. Methods 2022, 43, 1707–1734. [Google Scholar] [CrossRef]
- Verma, S.K.; Devarapalli, R. Fractional order PIλDμ controller with optimal parameters using Modified Grey Wolf Optimizer for AVR system. Arch. Control Sci. 2022, 32, 429–450. [Google Scholar]
- Mansour, S.; Badr, A.O.; Attia, M.A.; Sameh, M.A.; Kotb, H.; Elgamli, E.; Shouran, M. Fuzzy Logic Controller Equilibrium Base to Enhance AGC System Performance with Renewable Energy Disturbances. Energies 2022, 15, 6709. [Google Scholar] [CrossRef]
- Mazibukol, N.; Akindejil, K.T.; Sharma, G. Implementation of a FUZZY logic controller (FLC) for improvement of an Automated Voltage Regulators (AVR) dynamic performance. In Proceedings of the 2022 IEEE PES/IAS PowerAfrica, Kigali, Rwanda, 22–26 August 2022; pp. 1–5. [Google Scholar]
- Eltag, K.; Zhang, B. Design robust self-tuning FPIDF controller for AVR system. Int. J. Control Autom. Syst. 2021, 19, 910–920. [Google Scholar] [CrossRef]
- Sambariya, D.K.; Nath, V. Optimal Control of Automatic Generation with Automatic Voltage Regulator Using Particle Swarm Optimization. Univers. J. Control. Autom. 2015, 3, 63–71. [Google Scholar] [CrossRef] [Green Version]
- Priyambada, S.; Mohanty, P.; Sahu, B. Fuzzy-PID Controller optimized TLBO Approach ON Automatic Voltage Regulator. In Proceedings of the International Conference on Energy, Power and Environment: Towards Sustainable Growth (ICEPE), Shillong, Meghalaya, 12–13 June 2015. [Google Scholar]
- Shayeghi, H.; Younesi, A.; Hashemi, Y. Optimal design of a robust discrete parallel FP + FI + FD controller for the Automatic Voltage Regulator system. Electr. Power Energy Syst. 2015, 67, 66–75. [Google Scholar] [CrossRef]
- Badr, A.O.; Mansour, S.; Sameh, M.A.; Attia, M.A. Seamless Transition and Fault-Ride-Through by Using a Fuzzy EO PID Controller in AVR System. Energies 2022, 15, 8475. [Google Scholar] [CrossRef]
- Mosaad, A.M.; Attia, M.A.; Abdelaziz, A.Y. Whale optimization algorithm to tune PID and PIDA controllers on AVR system. Ain Shams Eng. J. 2019, 10, 755–767. [Google Scholar] [CrossRef]
- Mosaad, A.M.; Attia, M.A.; Abdelaziz, A.Y. Comparative Performance Analysis of AVR Controllers Using Modern Optimization Techniques. Electr. Power Compon. Syst. 2018, 46, 2117–2130. [Google Scholar] [CrossRef]
- Attia, M.A.; Abdelaziz, A.Y.; Sarita, K.; Vardhan, A.S.S.; Vardhan, A.S.S.; Singh, S.; Saket, R.K. AVR Performance Enhancement by Using Adaptive PI Controller. In Proceedings of the Third International Conference on Intelligent Computing, Information and Control Systems, Trichy, India, 2–3 July 2021; Springer: Singapore, 2022; pp. 249–260. [Google Scholar]
- Kilbas, A.A.; Marichev, O.I.; Samko, S.G. Fractional Integrals and Derivatives (Theory and Applications); Gordon and Breach: Montreux, Switzerland, 1993. [Google Scholar]
- Omar, O.A.; Alnafisah, Y.; Elbarkouky, R.A.; Ahmed, H.M. COVID-19 deterministic and stochastic modelling with optimized daily vaccinations in Saudi Arabia. Results Phys. 2021, 28, 104629. [Google Scholar] [CrossRef]
- Tsirimokou, G.; Psychalinos, C.; Elwakil, A. Design of CMOS Analog Integrated Fractional-Order Circuits; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Monje, C.A.; Chen, Y.Q.; Vinagre, B.M.; Xue, D.; Feliu, V. Fractional-Order Systems and Controls; Springer: London, UK, 2010. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error | ||||||
|---|---|---|---|---|---|---|
| Change in Error | Negative Big (NB) | Negative (N) | Zero (Z) | Positive (P) | Positive Big (PB) | |
| NB | NB | NB | NB | N | Z | |
| N | NB | NB | N | Z | P | |
| Z | NB | N | Z | P | PB | |
| P | N | Z | P | PB | PB | |
| PB | Z | P | PB | PB | PB | |
| Model | System Parameter Range | Values Used |
|---|---|---|
| Amplifier | ||
| Exciter | ||
| Generator | ||
| Sensor |
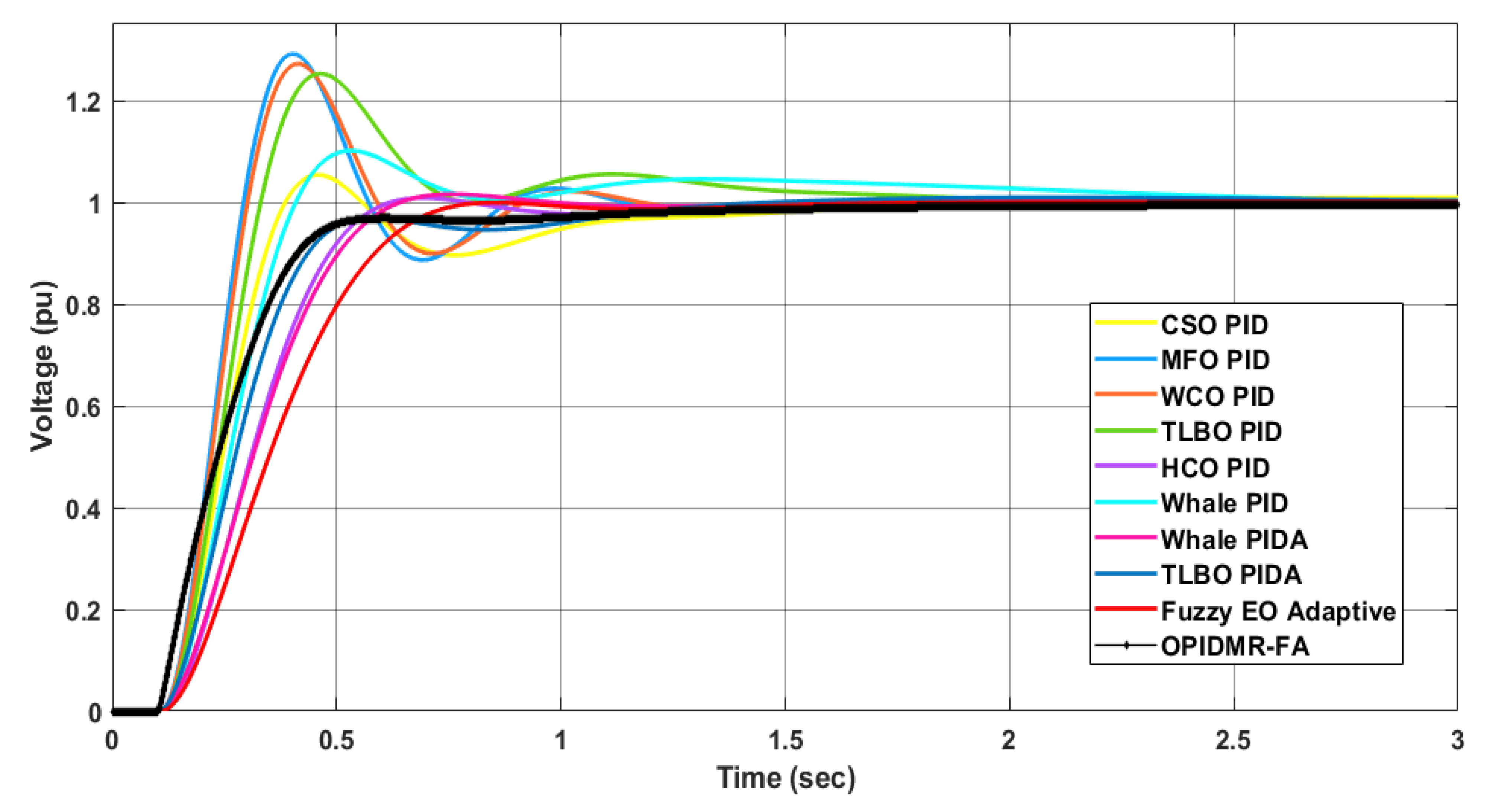
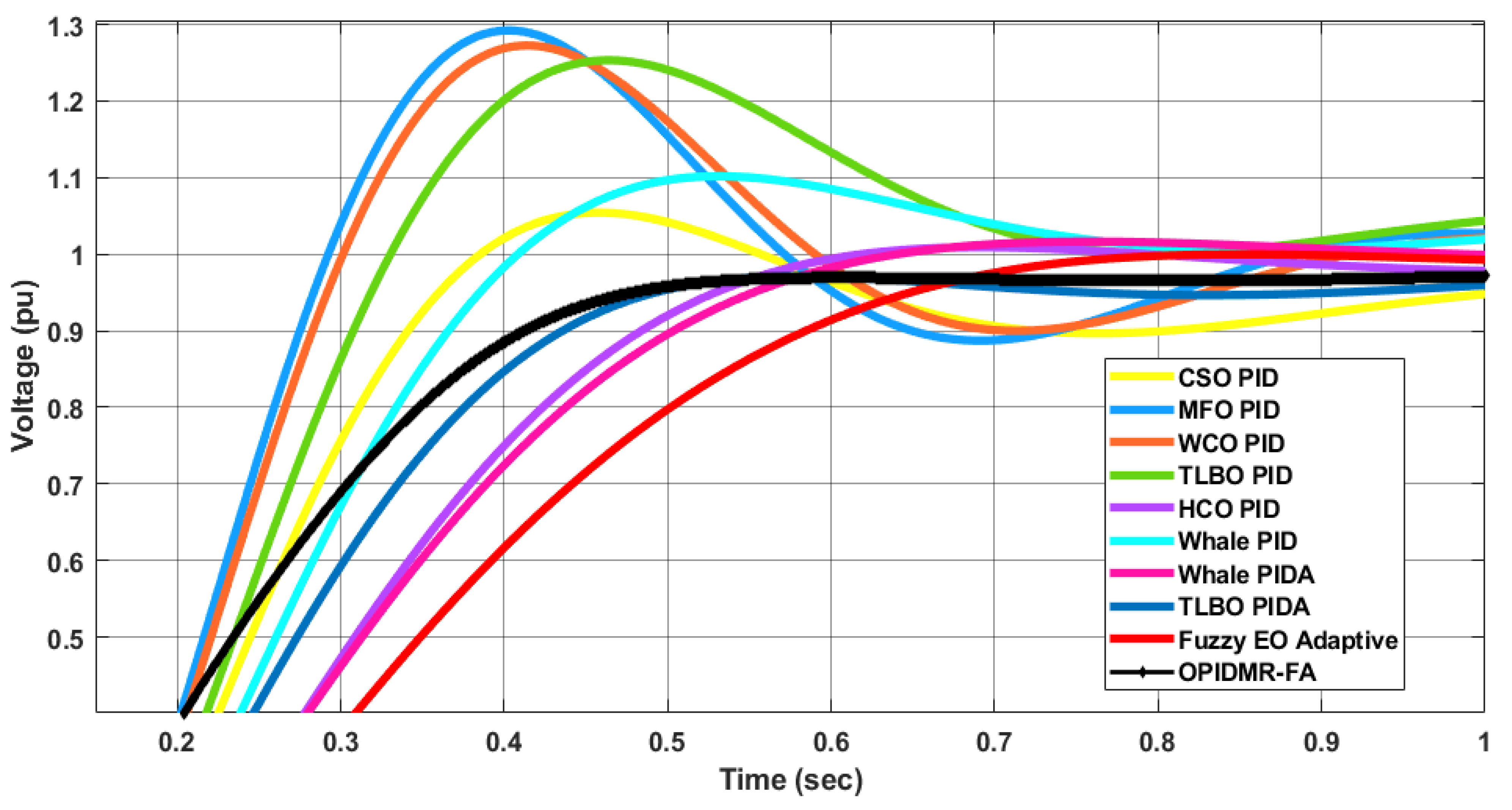
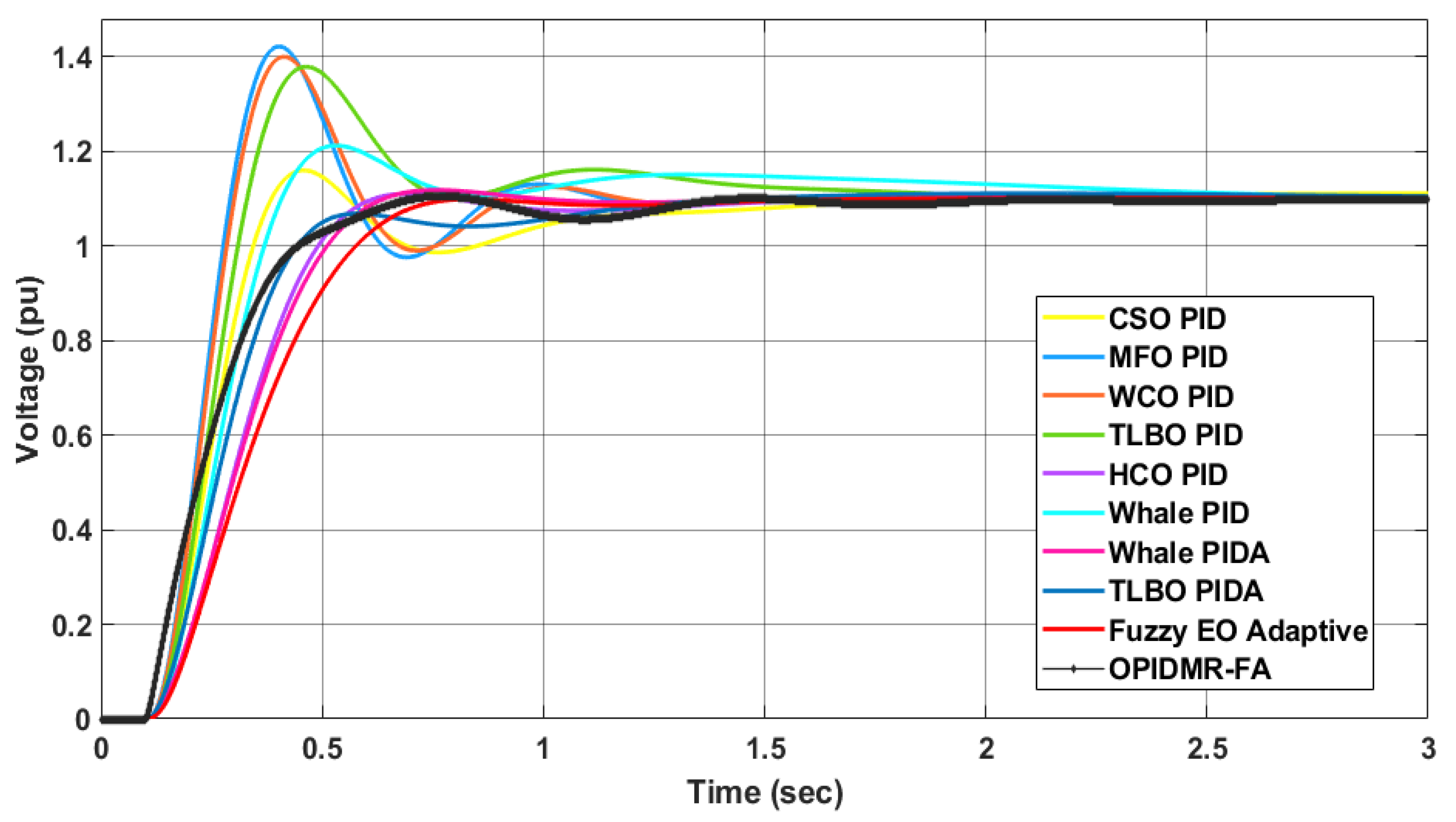
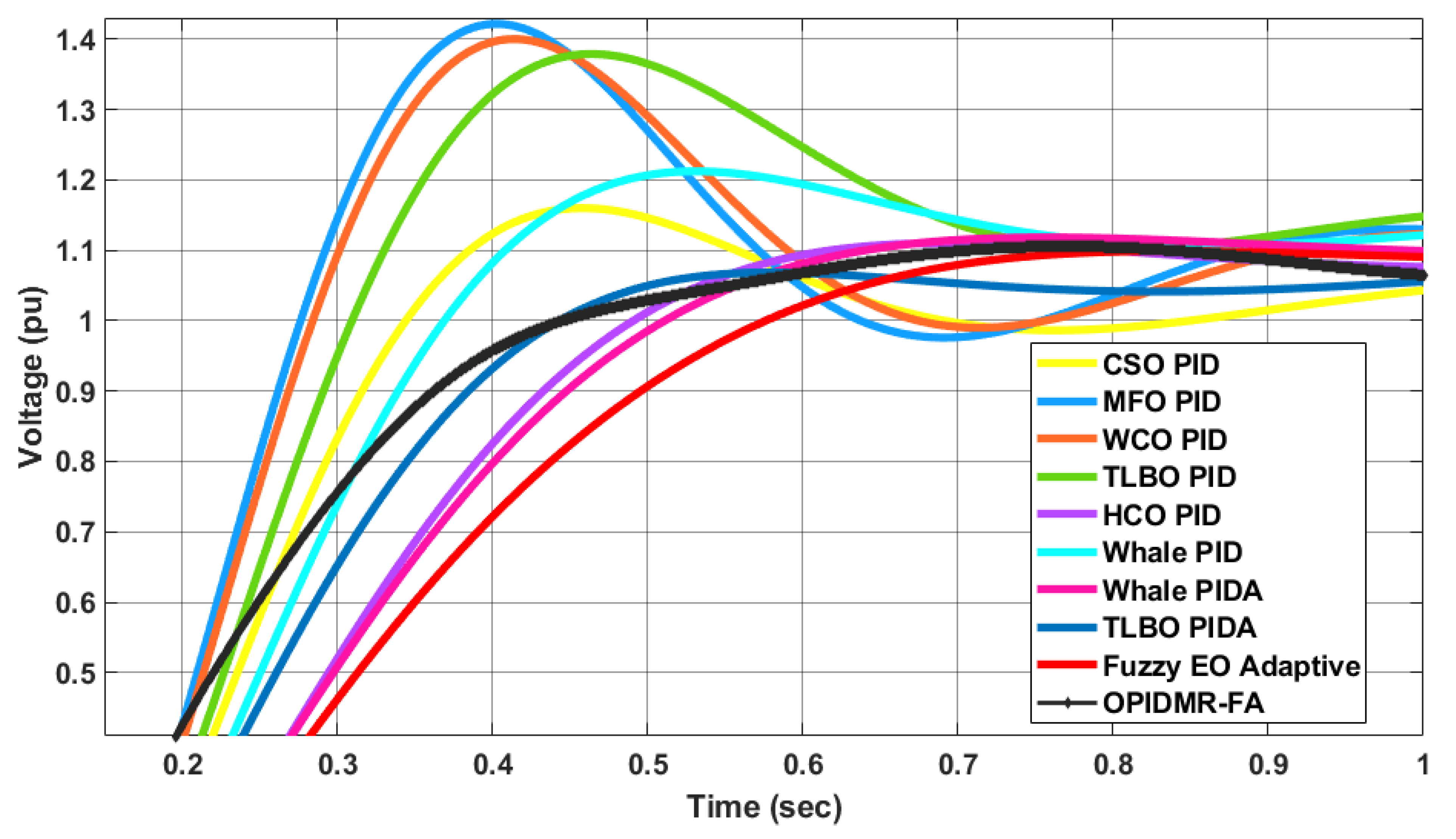
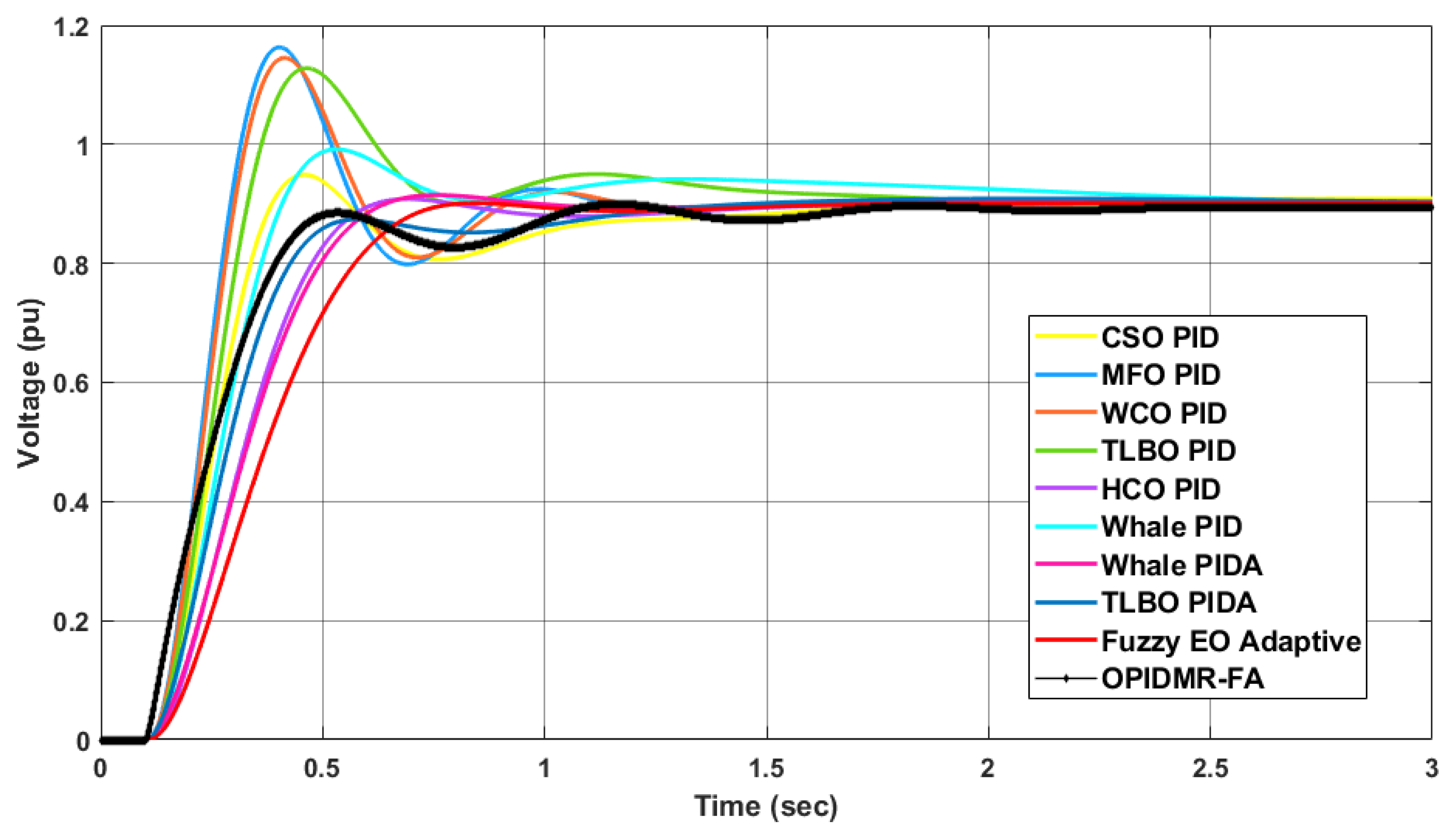
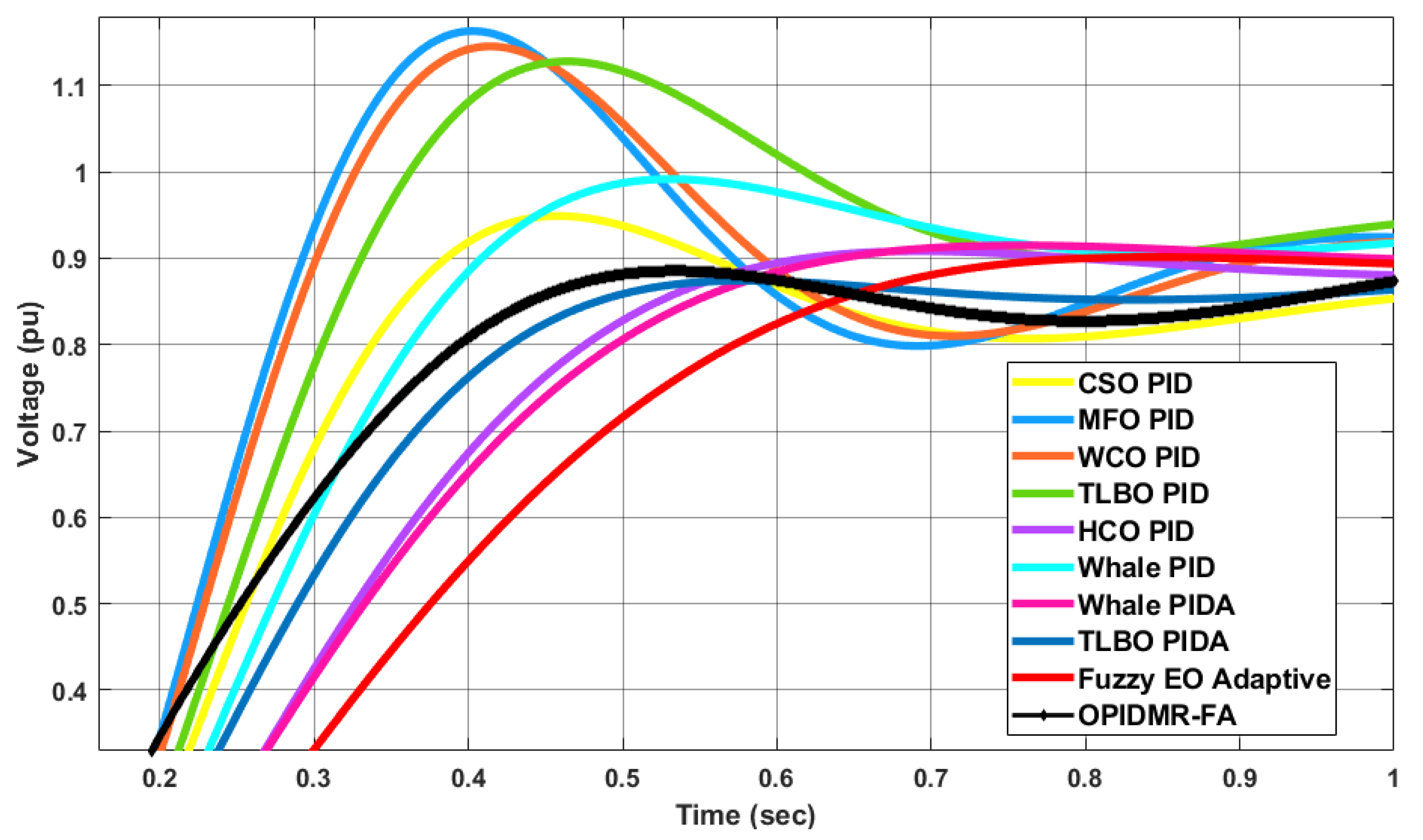
| Controller | Rise Time (s) | Maximum Overshoot (p.u.) | Settling Time (s) |
|---|---|---|---|
| CSO-PID | 0.3422 | 1.05413 | 1.475 |
| MFO-PID | 0.2745 | 1.2907 | 1.0507 |
| WCA-PID | 0.2835 | 1.2725 | 1.0552 |
| TLBO-PID | 0.3083 | 1.2524 | 1.5459 |
| HCO-PID | 0.4821 | 1.01 | 0.5723 |
| Whale-PID | 0.367 | 1.102 | 2.197 |
| Whale-PIDA | 0.5046 | 1.02 | 0.5949 |
| TLBO-PIDA | 0.4369 | - | 1.143 |
| FAOPID | 0.5836 | - | 0.6964 |
| OPIDMR-FA | 0.4094 | - | 0.6068 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Omar, O.A.M.; Marei, M.I.; Attia, M.A. Comparative Study of AVR Control Systems Considering a Novel Optimized PID-Based Model Reference Fractional Adaptive Controller. Energies 2023, 16, 830. https://doi.org/10.3390/en16020830
Omar OAM, Marei MI, Attia MA. Comparative Study of AVR Control Systems Considering a Novel Optimized PID-Based Model Reference Fractional Adaptive Controller. Energies. 2023; 16(2):830. https://doi.org/10.3390/en16020830
Chicago/Turabian StyleOmar, Othman A. M., Mostafa I. Marei, and Mahmoud A. Attia. 2023. "Comparative Study of AVR Control Systems Considering a Novel Optimized PID-Based Model Reference Fractional Adaptive Controller" Energies 16, no. 2: 830. https://doi.org/10.3390/en16020830
APA StyleOmar, O. A. M., Marei, M. I., & Attia, M. A. (2023). Comparative Study of AVR Control Systems Considering a Novel Optimized PID-Based Model Reference Fractional Adaptive Controller. Energies, 16(2), 830. https://doi.org/10.3390/en16020830