

Turbine Fast Valving Setting Method Based on the Hybrid Simulation Approach


Abstract
:1. Introduction
- Unlike generator tripping (GT): the most commonly used means of reducing surplus generated active power, which provides a discrete reduction in the generated active power and requires a fast startup [6]. FV is not technologically undesirable and does not lead to a decrease in the total inertia of the EPS, which further aggravates the situation during an accident. Additionally, FV does not lead to an increase in the turbine speed due to the use of GT, which can lead to the operation of emergency valves.
- In contrast to electric (dynamic) braking (EB), FV is a cost-effective CA because its normal operation does not require the additional installation of specialized high-voltage resistors, operating on generator voltage and the appropriate switches in order to form the necessary system to vary the amount of braking power. For example, when faults occur close to the generator terminals, the voltage decreases and the breaking resistor cannot operate until the faulted element is localized. However, from the very beginning of the fault, fast valving can be applied to effectively control the acceleration of the rotor during the period of the fault [7].
- Developed and tested in a real EPS method for the optimal setting of the FV parameters, providing the technologically most efficient control of the FV process and taking into account the influence of the external network on these parameters.
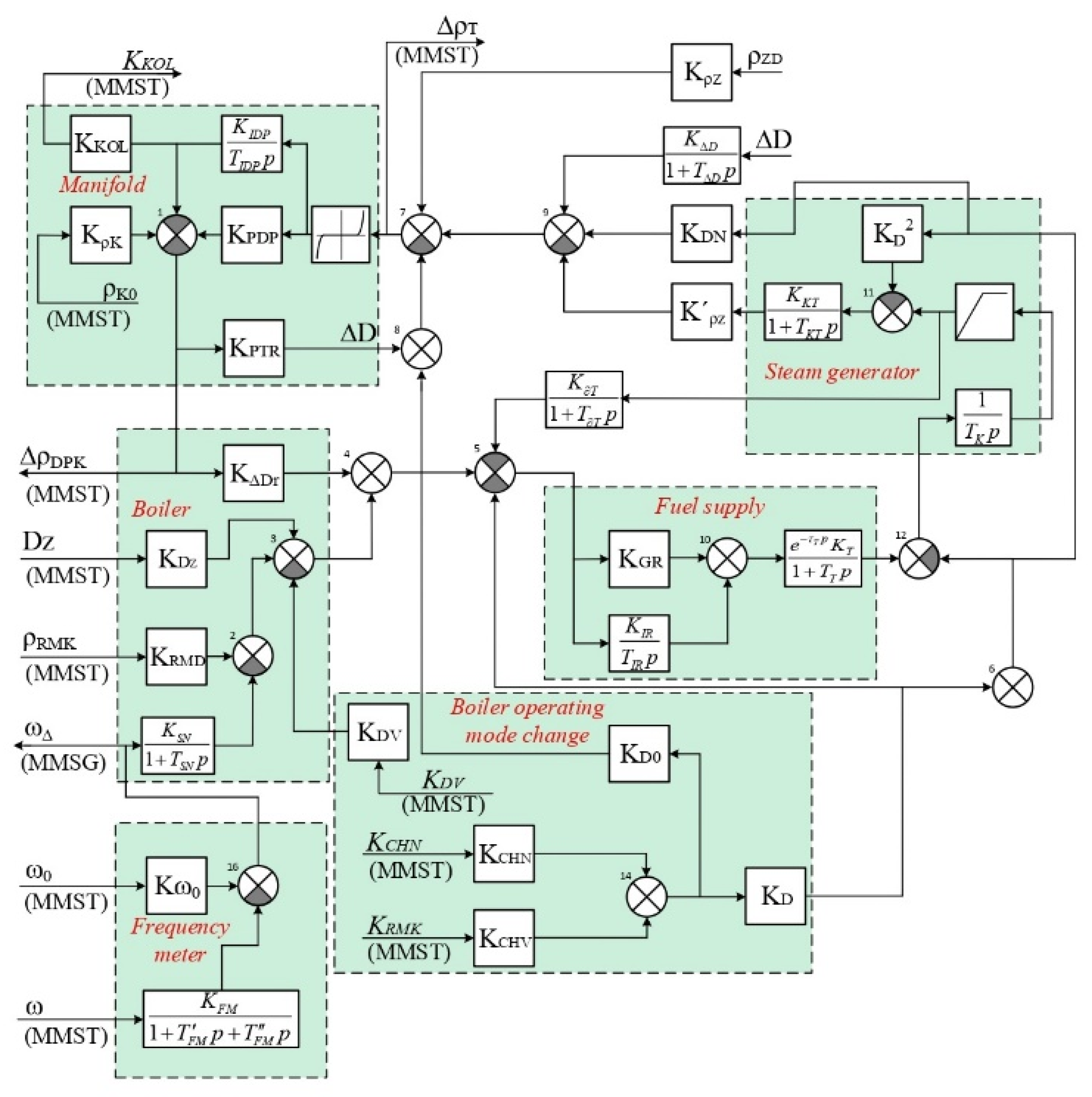
- A complete and reliable mathematical model has been developed based on the data of a real prime mover, consisting of a steam turbine, a boiler unit, and their control systems. This model makes it possible to dynamically change the setting parameters to generate a control signal RT of a complex shape, necessary for the optimal control of the transient process in the event of an emergency power surplus.
2. Development of Fast Valving Setting Methodology
- 1.
- In the studied electric power system, a station is selected, which includes a power unit allocated for unloading. The selected power unit must meet the following requirements:
- (1)
- Power unit with long-term synchronous swings in electric power and generator rotation speed, the average value of the turbine power did not decrease by more than 10–15% of its initial power and did not increase by more than 5%.
- (2)
- The power unit must be able to reduce the generated power to any value that lies within its regulatory range in no more than 4 s. At the same time, automatic time rate limiters should not operate if this is not required to ensure the safety of the unit equipment. After a unit’s power is rapidly reduced to a value within its regulation range, the unit must be able to operate at that power for an unlimited time. In addition, no further shutdown of the equipment shall be required other than that which may be necessary during the normal operational derating of the unit. After a rapid decrease in the power of the unit to a value less than the limit of the regulation range, the short-term operation of the unit with such power should be allowed, followed by the restoration of the power to a value lying within the regulation range.
- (3)
- The power unit must be able to reduce the turbine power by at least 5% of the nominal value in 0.1–0.2 s after the signal for use is provided. The power unit must be able to reduce the turbine power by at least 5% of the nominal value in 0.1–0.2 s after the signal to use the MFV. The rate of power shedding from 95% to 5% from the moment of applying the MFV must be at least 2 pu/sec. The power of the turbine from the nominal value to the value corresponding to the auxiliary load must decrease in no more than 0.7 s. Decreasing the speed should be allowed to recover the power by applying an exponential signal to power up after the MFV operation.
- (4)
- The rate of increase in the generated power must be at least 10% in 2 s.
- 2.
- The power flows are determined along the lines outgoing from the station, in all steady-state circuit-mode (summer maximum, winter maximum, repairing, etc.) states of the EPS.
- 3.
- Using a simulation tool that can implement detailed models of the main and auxiliary equipment of the EPS that meet the requirements, a sufficiently complete and reliable continuous spectrum of emergency processes is preliminarily modeled, leading to the occurrence of an excess of generated active power (for example: short circuit, line disconnection, incorrect personnel action) on the sections defined in paragraph 2, on an unlimited interval.
- 4.
- From the transients obtained in paragraph 3, those are selected in which there is a losing of the stability of the generating equipment of the station in question and the emerging power excess are determined.
- 5.
- For each specific emergency process associated with the occurrence of an emergency excess of active power, the numerical values of the MFV parameters are determined:
- (1)
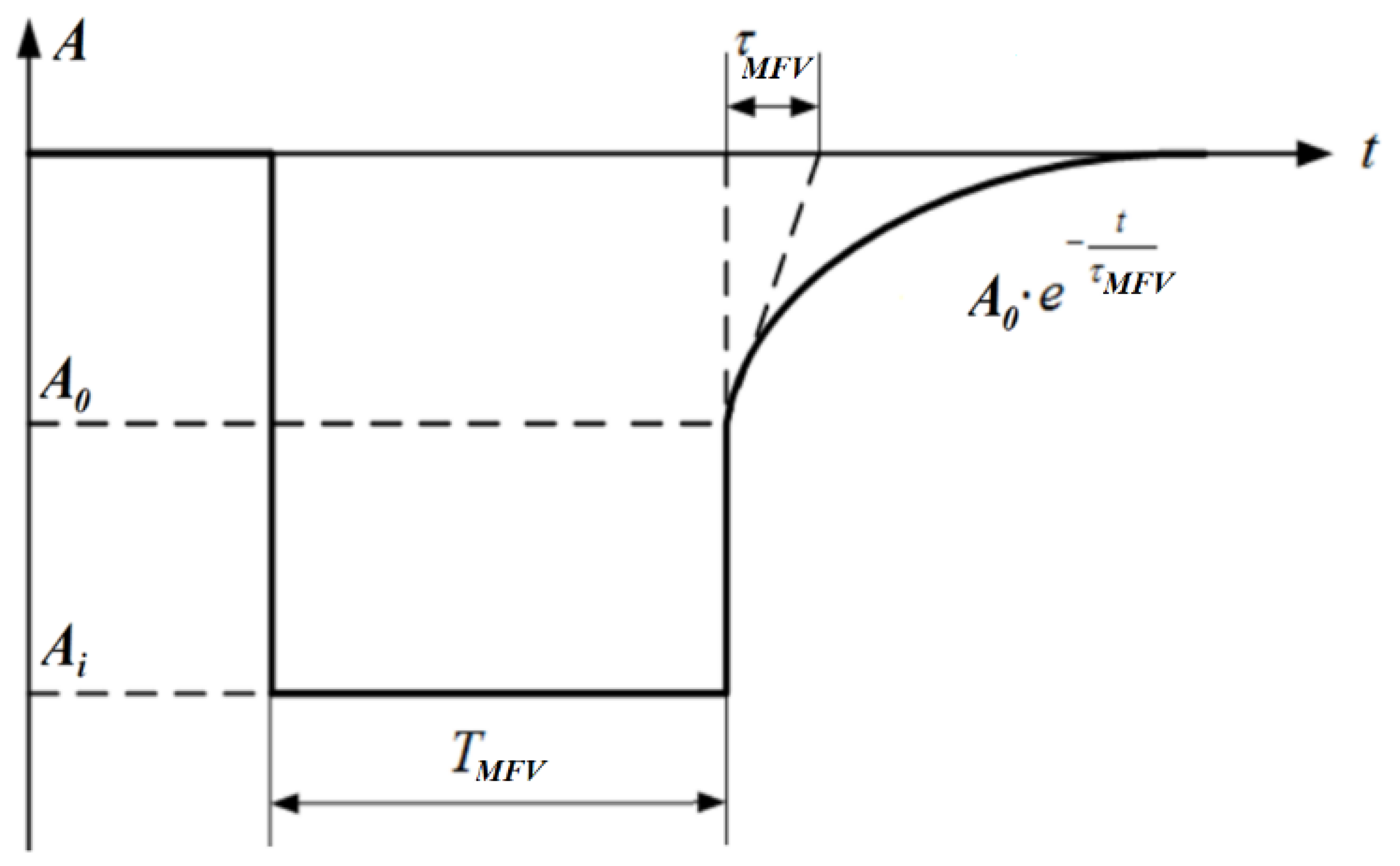
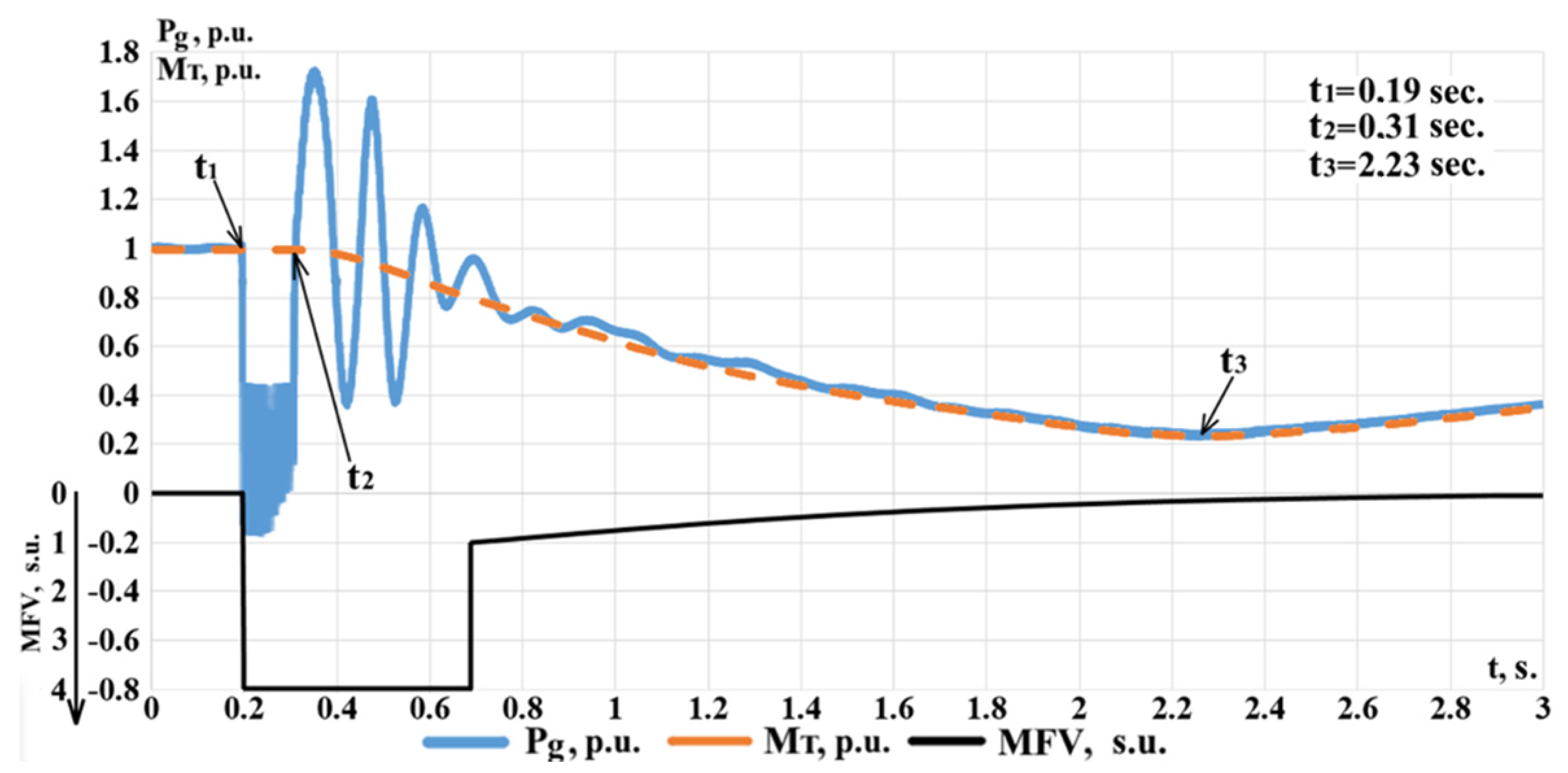
- Ai is assigned based on the compensation of the time constants: EGC, pilot valves, servomotors of the HPC, MPC, and LPC, and steam volumes in the turbine cylinders. Focusing on these time constants, the value of Ai is set, with an increase in which (Ai + 1) the rate of change in the turbine torque does not increase. Starting from the value Ai = 4 pu, with a step 0.1 pu in the direction of decreasing, choose the value at which the rate of the decrease in the mechanical torque of the turbogenerator (Vi) meets the following conditions:where : MS is the turbine mechanical torque before MFV, MMFV is the minimum turbine mechanical torque during MFV, tMFV is the time of MMFV, and tS is the MFV starting time.
- (2)
- TMFV is taken according to the required unloading depth. Selecting the TMFV parameter starts from the value of TMFV = 0.1 sec. in increments of 0.25 upwards, and selecting the value at which the unloading depth will correspond to the following inequality:where PPA is the generated active power in the post-accident mode and PMFV is the minimum generated active power during MFV.
- (3)
- Choice of parameters A0 and τMFV. The definition of these parameters occurs jointly, because the minimization of the power swings when establishing a post-accident mode is achieved by a combination of the parameters A0 and τMFV. Take A0 = 1 pu, starting from the value τMFV = 1 with a step of 0.5 upwards, select the value τMFV at which the minimum level and duration of the synchronous swings are achieved. Repeat the selection of the τMFV values at A0 = 1.5 and A0 = 2. Accept the values of the remaining parameters: Ai found in p. (1), TMFV found in p. (2). From the obtained three MFV characteristics, choose the one at which the minimum level of the overshoot and the duration of the synchronous swings are achieved.
3. Means of Implementing the Developed Methodology
3.1. Justification of the Approach to EPS Modeling
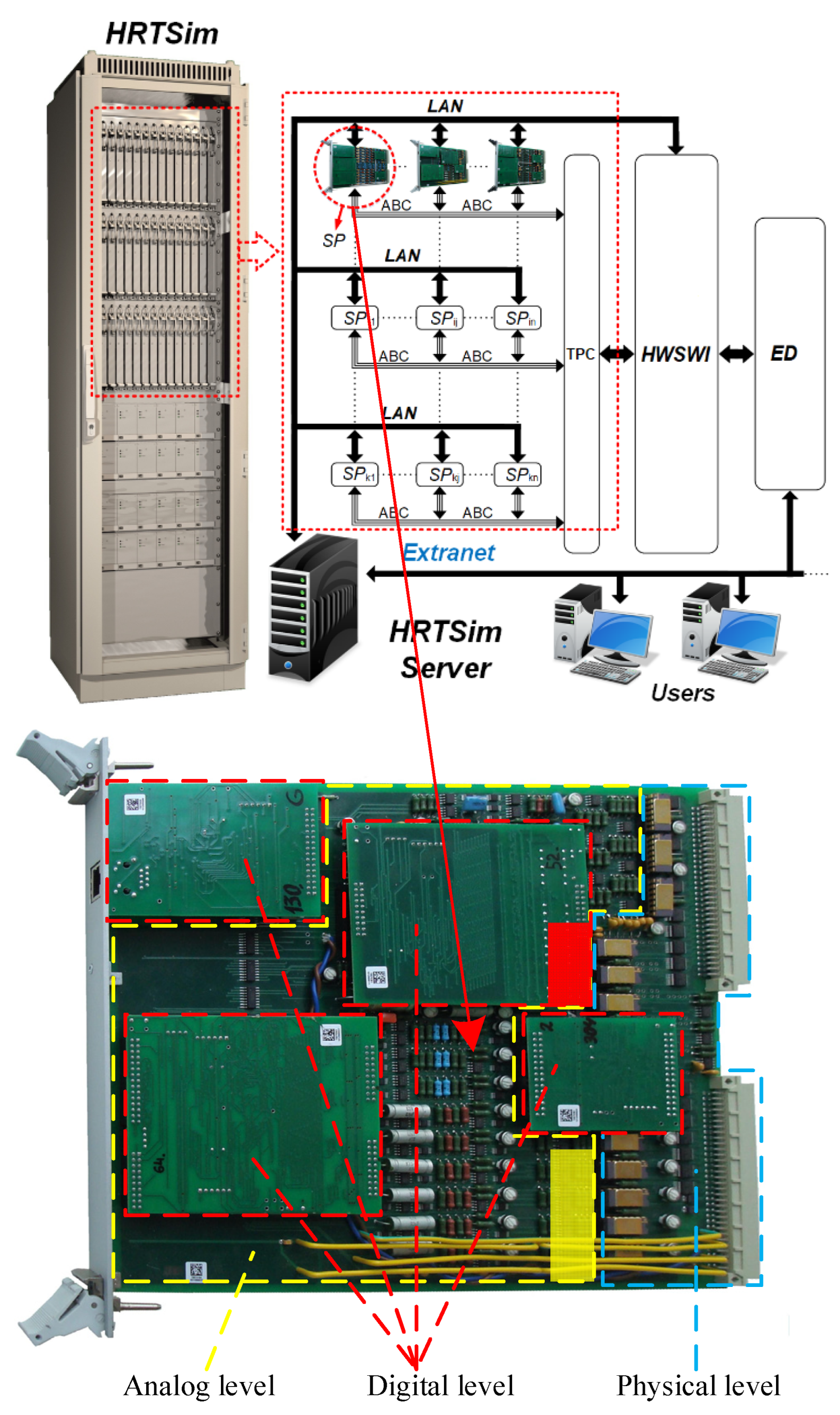
- The processes in the main equipment of the EPS (electric machines, transformers, transmission lines, etc.) are directly interrelated and are determinant, and the mathematical models describing them are very conservative and differ mainly in the values of the parameters. This substantiates the possibility of their simulation by the method of a continuous implicit integration using integrators based on operational amplifiers (analog method). This approach allows us to exclude the decomposition of the modes and processes, the simplification of the mathematical models of equipment, the problem of convergence of a numerical solution, the limitation of the reproduction interval of processes, and the methodological error of solving differential equations.
- The auxiliary equipment (control and regulation systems, etc.) and the mathematical models describing them are extremely diverse. In this regard, they are simulated at the digital level by the methods of numerical integration and the results of the solution are entered into the analog level by means of digital-analog transformation. Additionally, at the digital level is setting the parameters of the simulated equipment and the processing and transmission of information between different levels of simulation and the user through analog-digital converters. The digital approach provides flexibility in forming the necessary automatic regulation and control systems.
- Physical method of modeling is used due to the lack of reliable mathematical description of the reproduction of the switching processes, including in power semiconductor switches, by means of digitally controlled analog switches (DCAS). At the physical level, the interaction of the simulated main equipment of the EPS is carried out, similar to how it happens in a real power system. For this purpose, the conversion of continuous input/output current signals into their corresponding model physical currents by means of a precision analog multiplier is used. This approach allows for excluding information restrictions on the scale of the modeled EPS, that theoretically can be unlimited.
3.2. Development of a Mathematical Model of a Power Unit
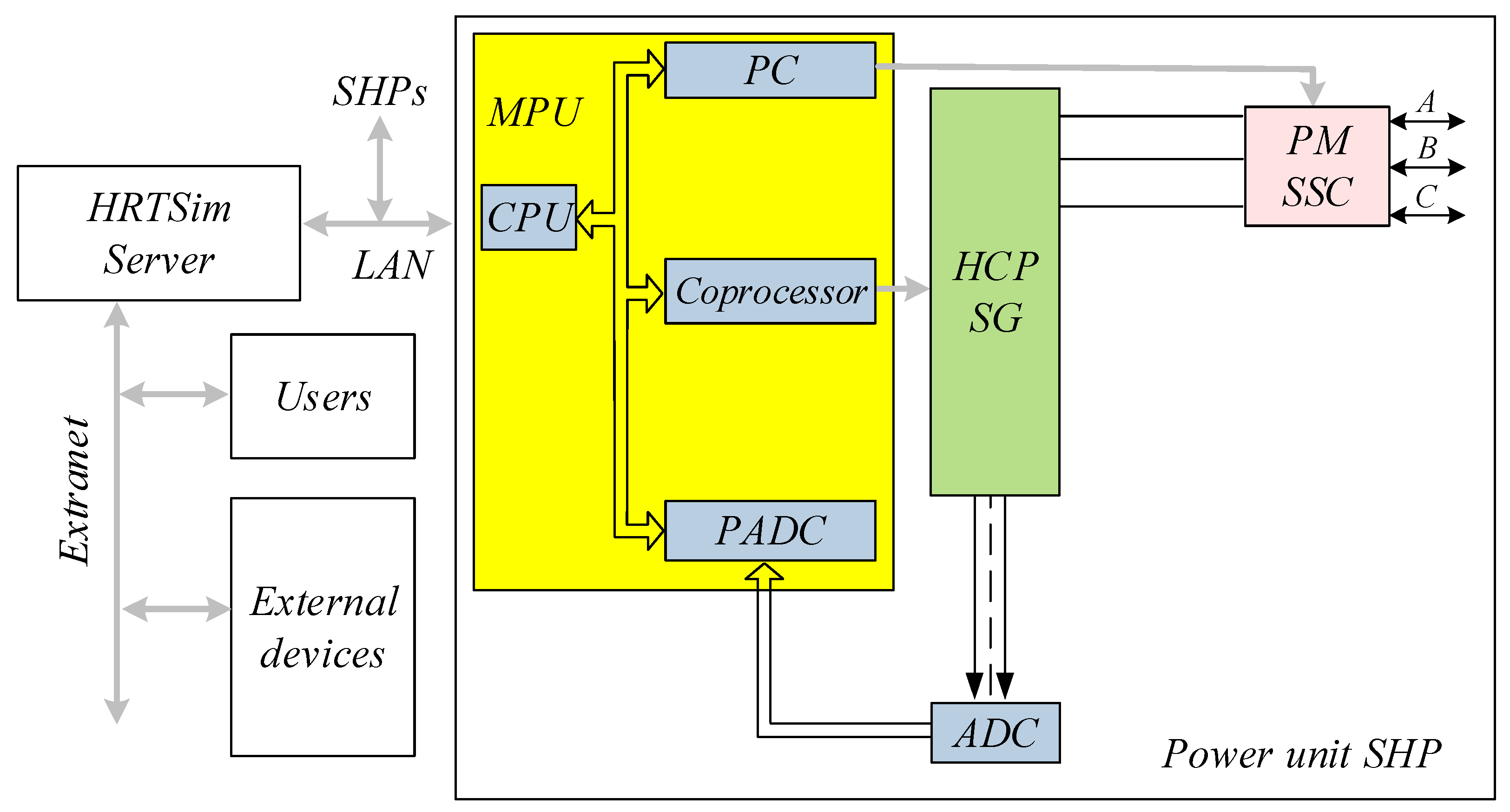
- The microprocessor unit (MPU) provides all the information and control functions of the power unit. SHP: communication with the HRTSim server, reception and processing of the simulation data, the implementation of automatic control systems, and the control of simulated equipment parameters, including the status of DCAS used to simulate the operation of circuit breakers and short circuits by the physical model of series and shunt commutation (PM SSC).
- The central processing unit (CPU) is designed to provide an interaction via the local area network (LAN) between the HRTSim server and the processor of analog-to-digital conversion (PADC), the coprocessor, and the processor of commutation (PC), and performs functions of receiving mode data from the HRTSim server and assigning them to the corresponding hybrid coprocessors (HCP), transferring simulation data to the HRTSim server, synchronizing the operation of all SHPs in the HRTSim.
- After the analog-to-digital conversion (ADC), the PADC provides the reading and processing of the HCP simulation data, as well as the functional control, including the dynamic control, of the parameters of the simulated equipment, particularly of the electrical machine, set in the corresponding HCP, as well as transferring the necessary mode data and parameters to the coprocessor.
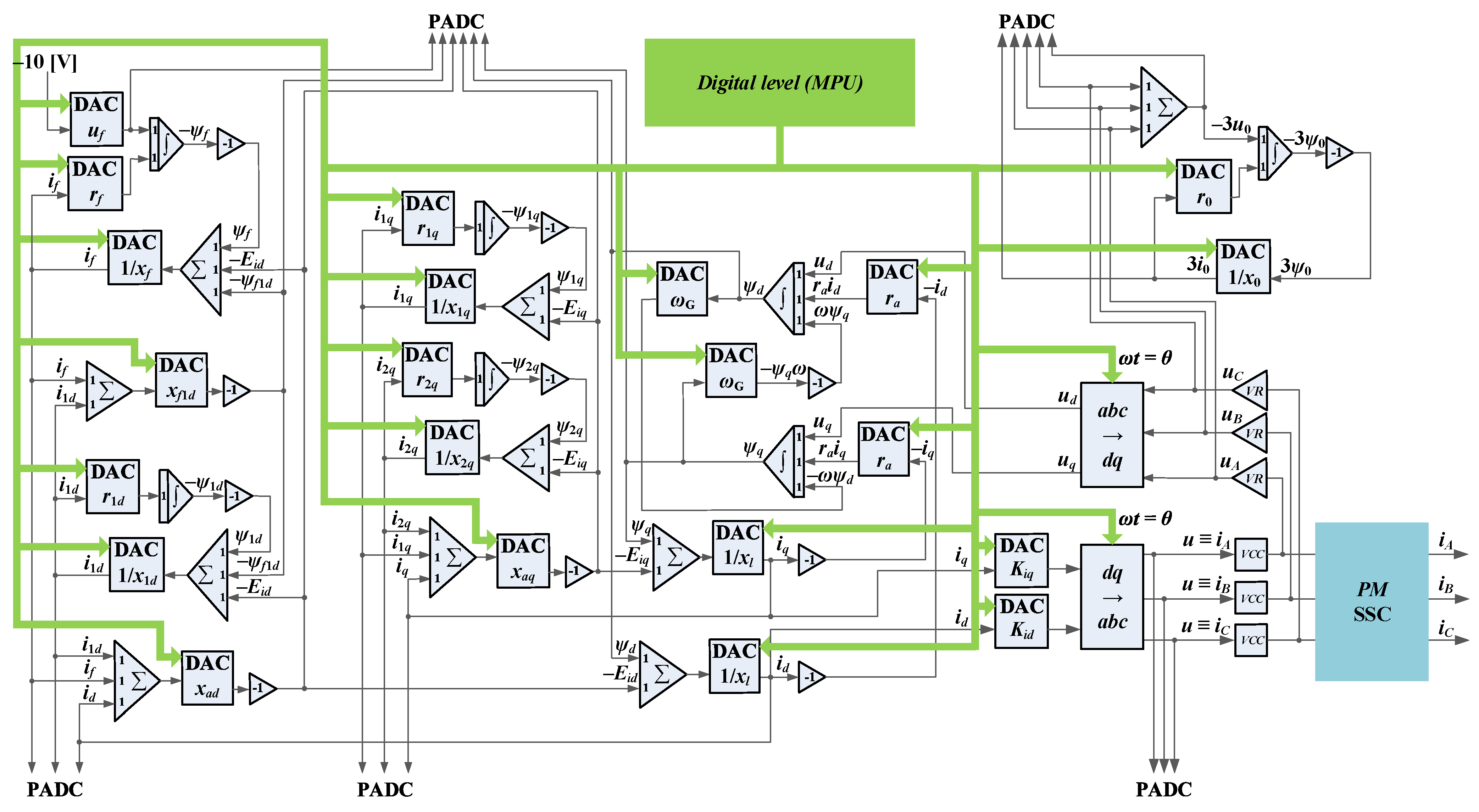
- The coprocessor receives data from the CPU and PADC to solve prime mover and excitation system models and to implement the automatic control system, as well as to form and transmit parameters into the hybrid coprocessor of the synchronous generator (HCP SG). Inside the HCP SG, the analog real-time solution of the stiff nonlinear system of the differential equations of the complete and reliable mathematical model of the synchronous generator is performed. The mathematical variables of the phase currents, formed continuously as a result of solution, represented by voltages, are transformed by means of voltage–current converters (VCC) into the corresponding model physical currents. Continuously formed in the nodes of stator circuits phase voltages, dependent mathematical variables are introduced into the HCP SG by means of voltage repeaters (VR), which exclude the physical influence of these feedbacks.
- Each HCP is a specialized parallel digital-to-analog structure of the methodically accurate continuous implicit integration in real time and over an unlimited interval of systems of differential equations of mathematical models of simulated equipment. The control of the parameters of these mathematical models is performed by means of digital-to-analog converters (DACs). The continuous mathematical variables of input–output currents represented by instantaneous voltage values are converted into their corresponding model physical currents.
- The PC generates the control actions for the DCAS of PM SSC.
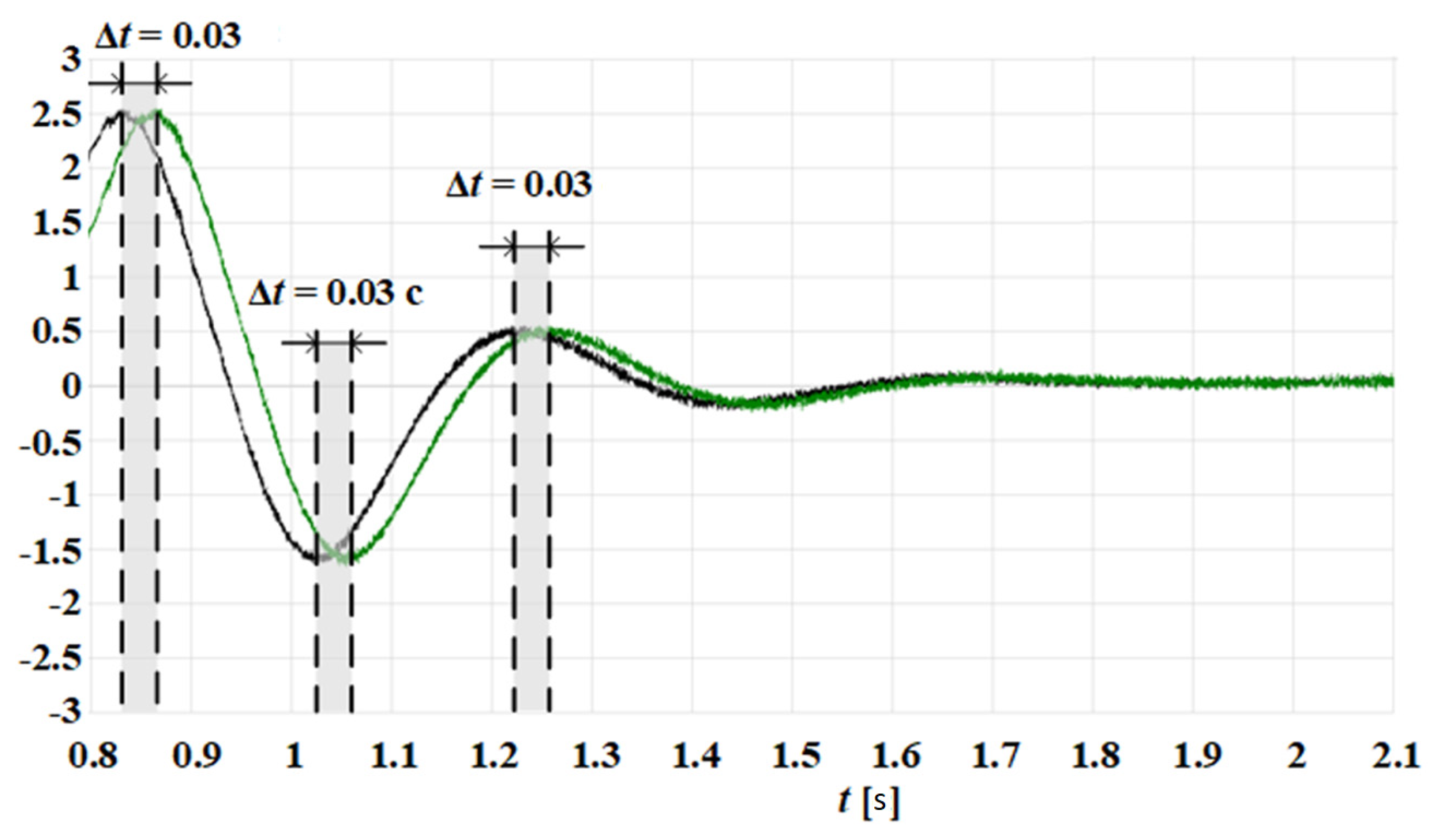
3.3. Testing for the Ascent of the Link of Delay in the Form of a Padé Function of the Second Order
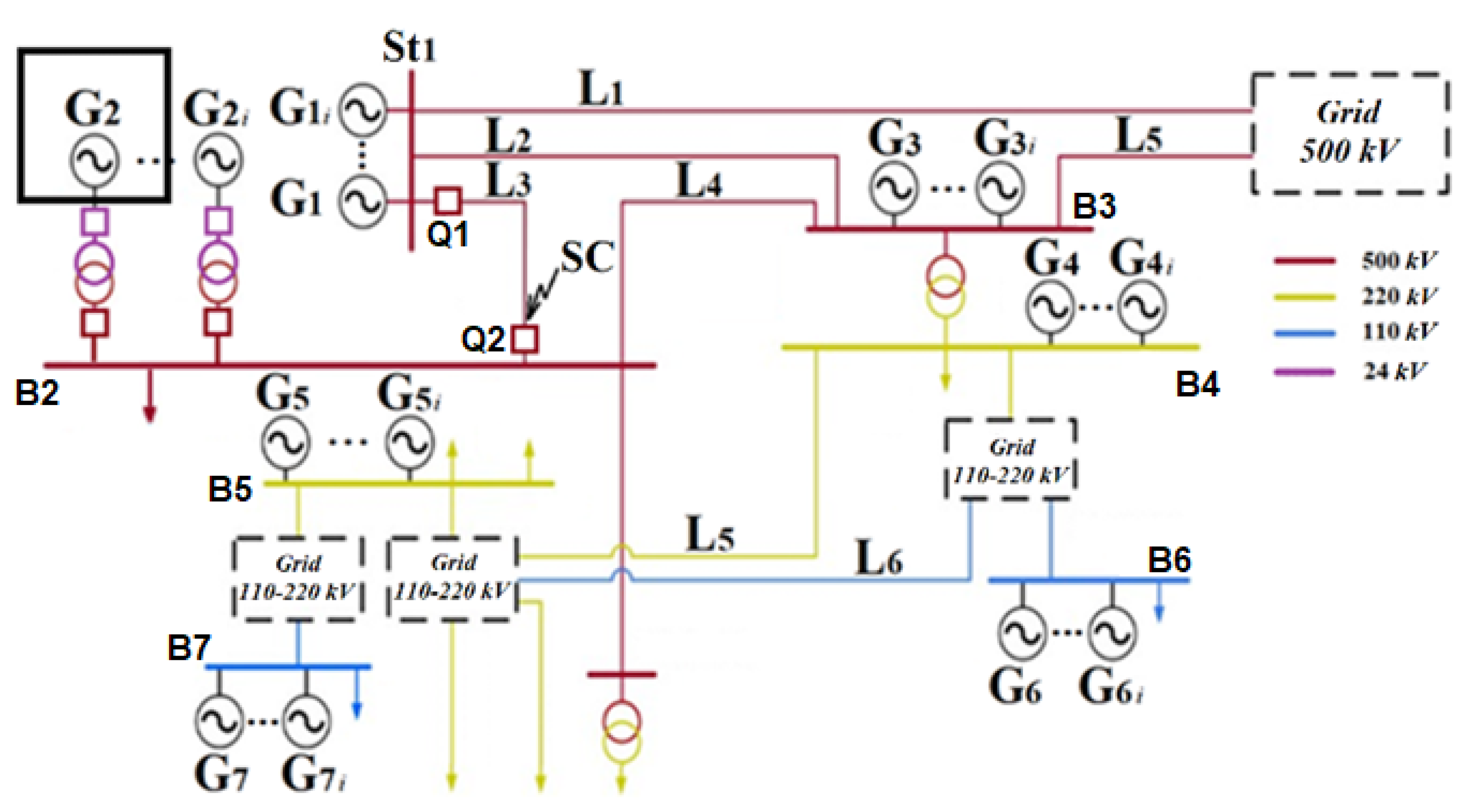
4. EPS Model Development
4.1. Verification of Simulation Results in Steady-State Mode
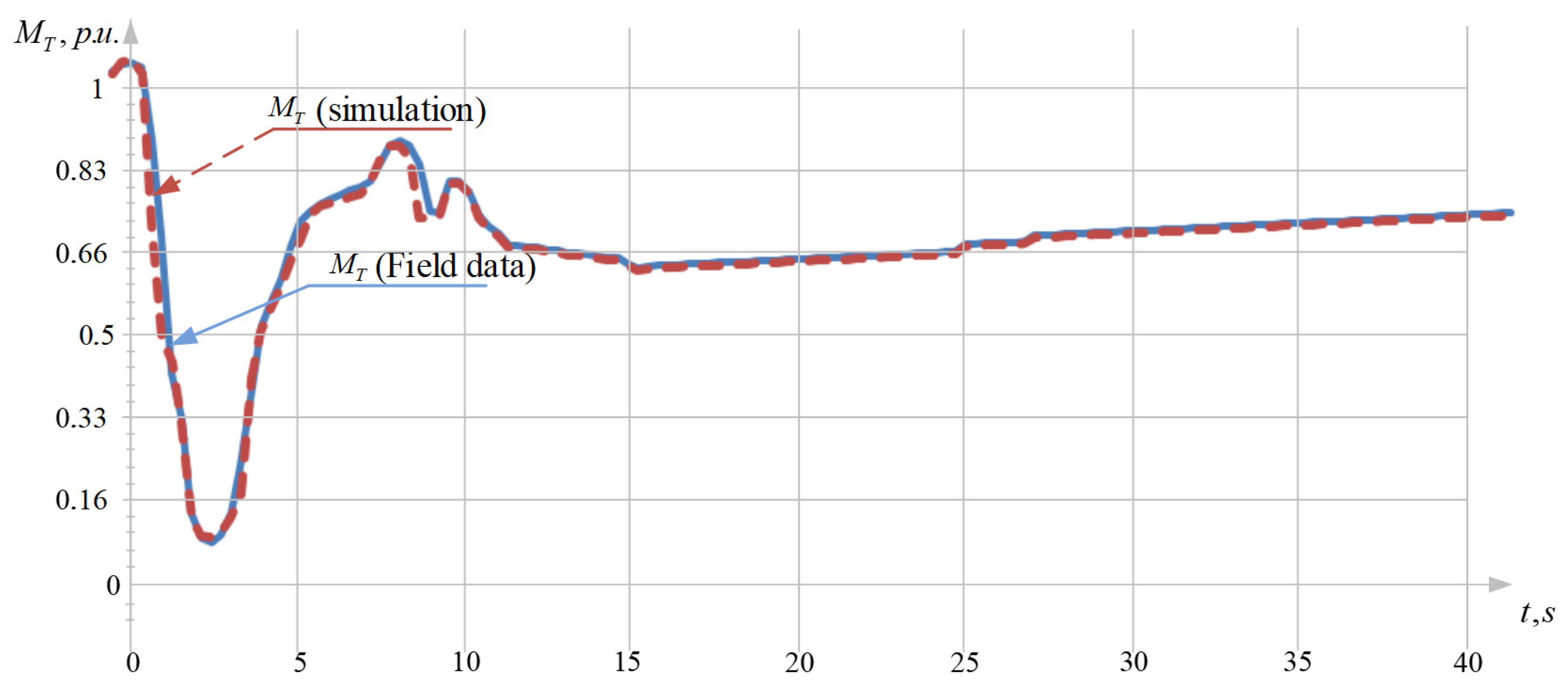
4.2. Verification of the Developed Power Unit Model
5. Results
5.1. Simulation of the Emergency Power Surplus
5.2. Experimental Studies of the Developed Methodology
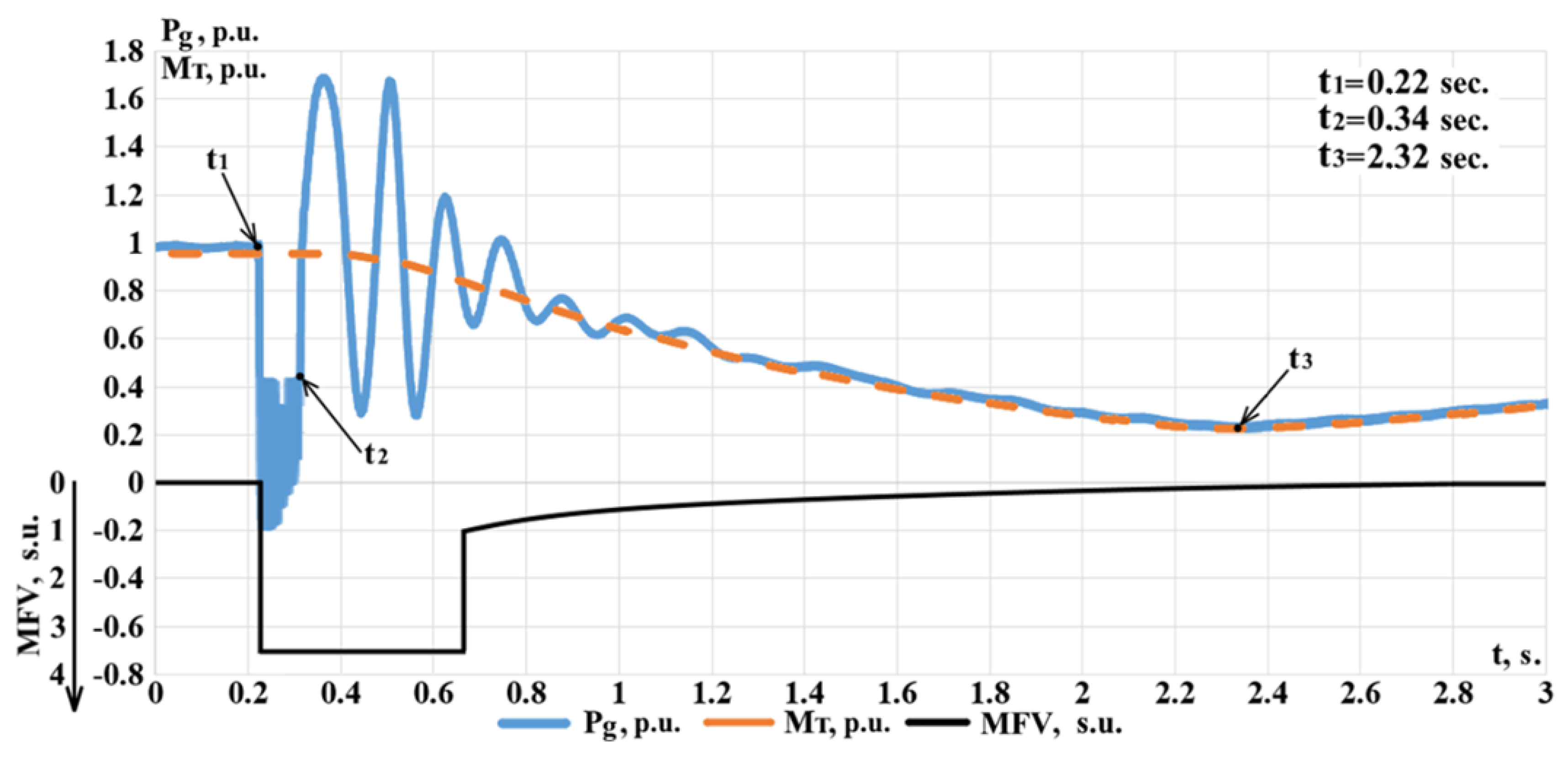
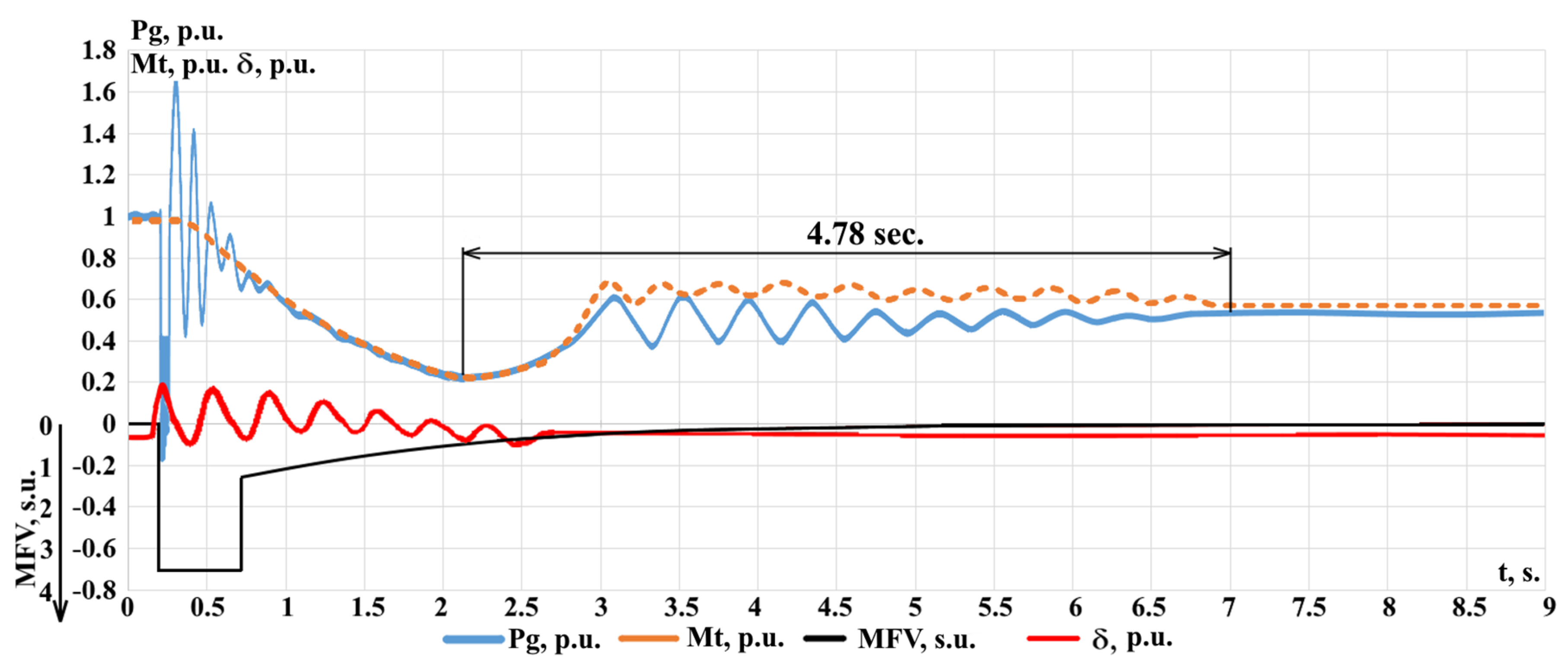
- Case 1: Ai = 3.5 pu.; TKPT = 0.55 s.; A0 = 1.25 pu.; τMFV = 2 s.
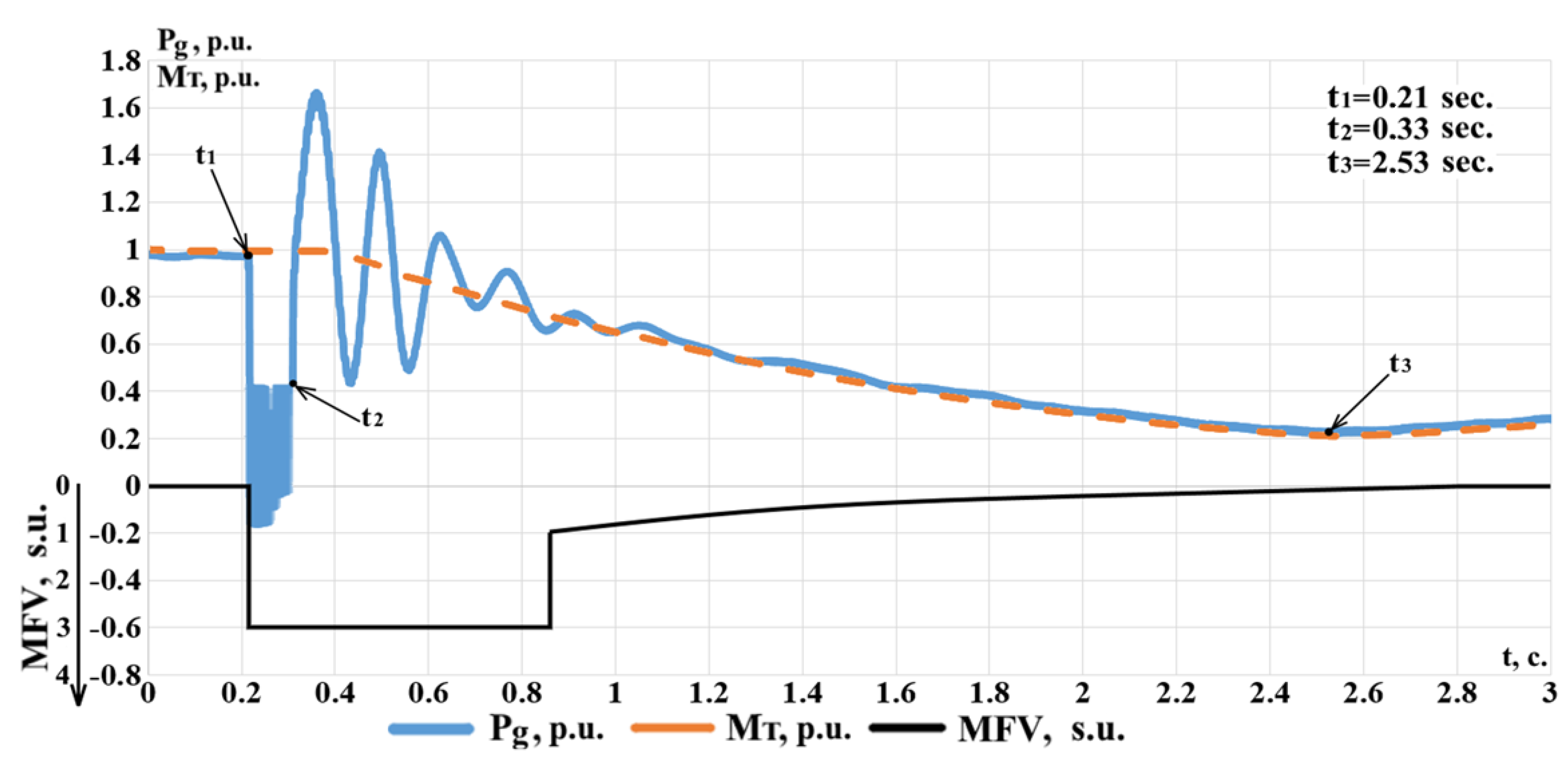
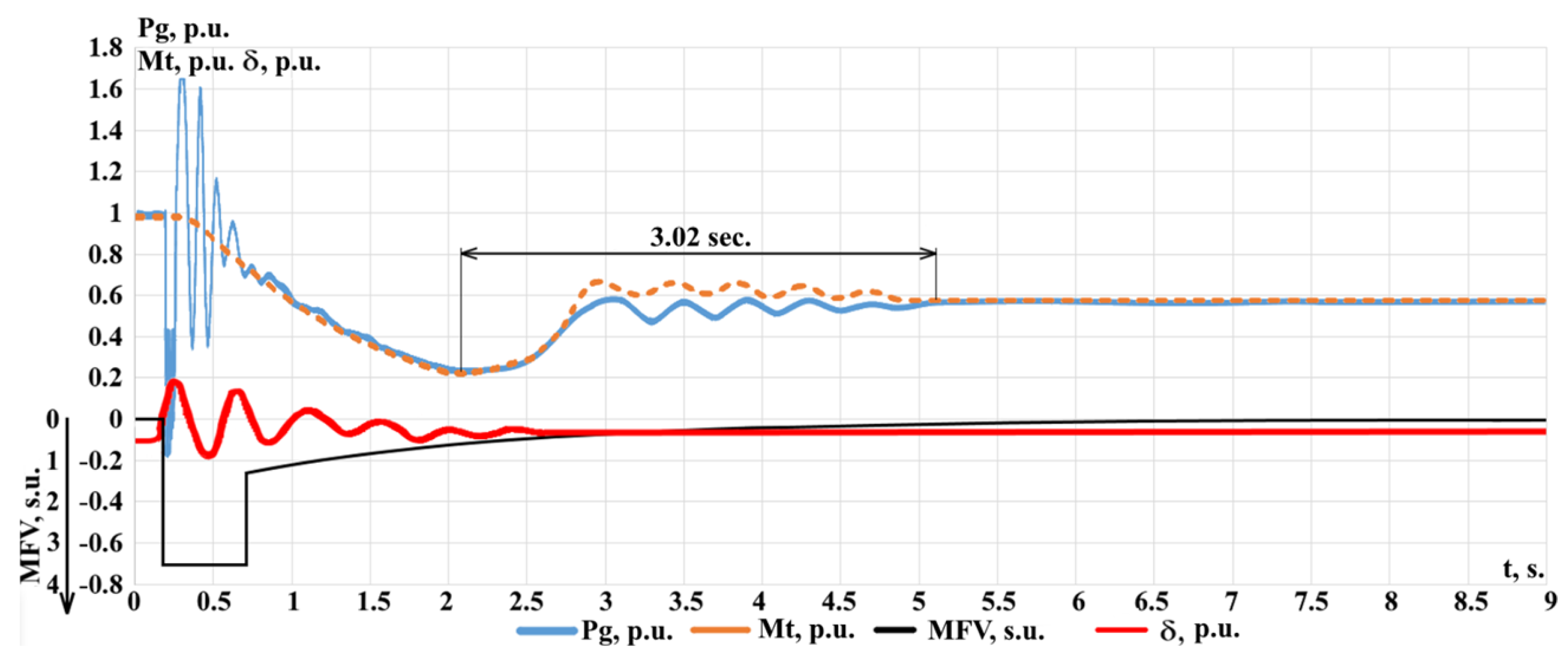
- Case 2: Ai = 3.5 pu TKPT = 0.55 s.; A0 = 1.25 pu.; τMFV = 1.5 s.
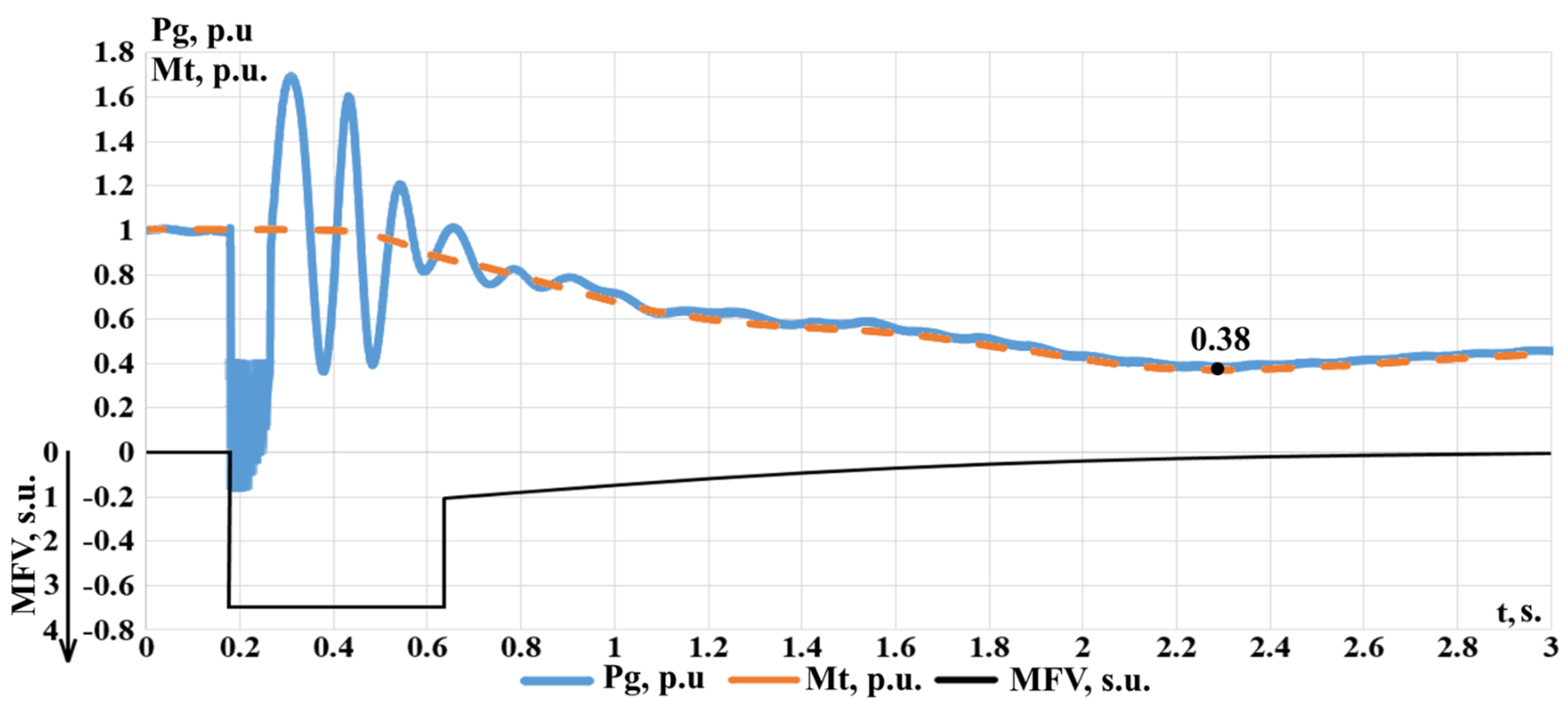
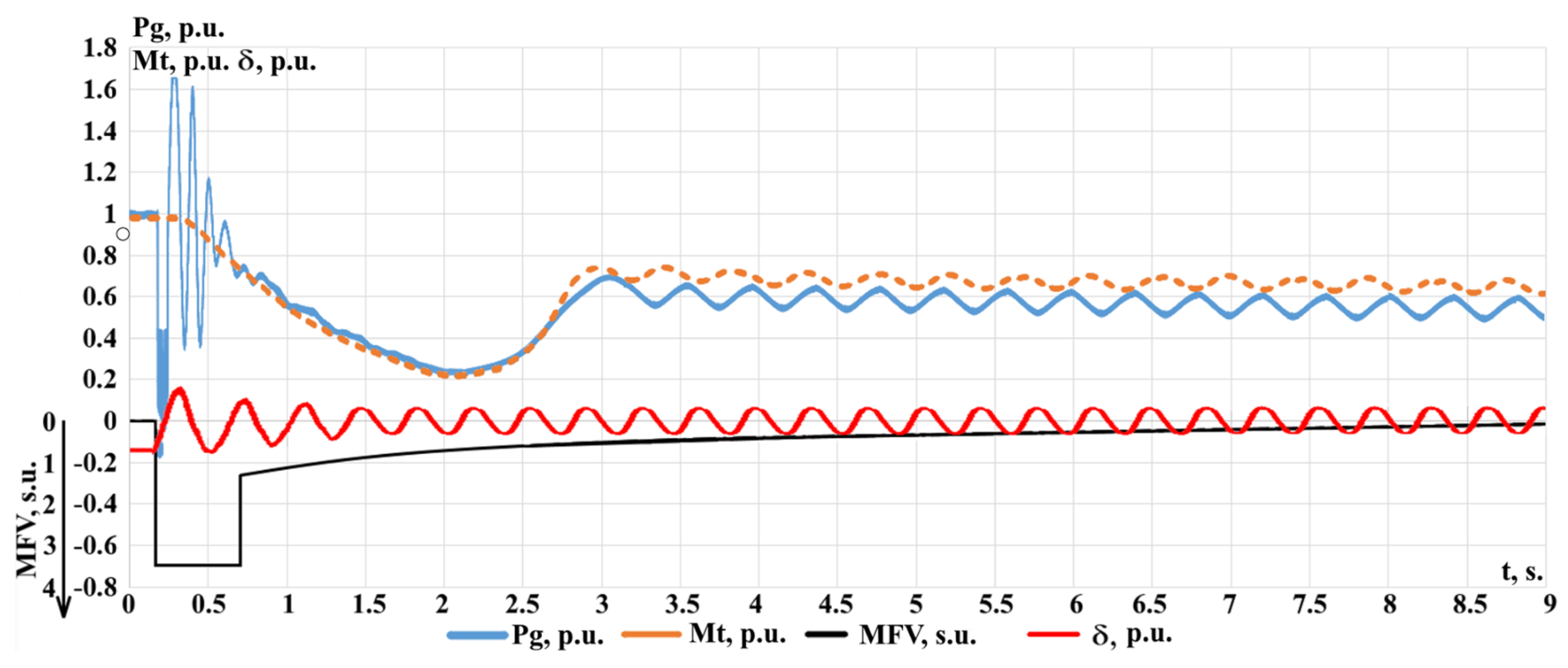
- Case 3: Ai = 3.5 pu.; TKPT = 0.55 s.; A0 = 1.25 pu; τMFV = 3 s.
5.3. Comparison with Existing Approach
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| KDRT | the coefficient of the post-fault power setting value (PDRT). |
| KMFV | MFV control command. |
| KSFV | SFV control command. |
| TEHS, KEHS | time constant (TC) and gain ratio (GR) of electrohydraulic system (EHS). |
| TMRM, KMRM | TC and GR of the slow-acting power control system. |
| TMUT, KMUT | TC and GR of turbine control gear. |
| TPZ | TC of intermediate valve of turbine governor. |
| KnV, KnS | GR of HPC and MPC with LPC steam turbine control valves. |
| TOZS | TC opening of the spool valves of the MPC and LPC servomotors. |
| TZZS | TC closing of the spool valves of the MPC and LPC servomotors. |
| TOSS | TC time constant of the servomotor piston movement of the spool valves of the MPC and LPC for opening. |
| TZSS | TC time constant of the servomotor piston movement of the spool valves of the MPC and LPC for closing. |
| TOZV | TC opening of the spool valves of the HPC servomotors. |
| TZZV | TC opening of the spool valves of the HPC servomotors. |
| TOSV | TC time constant of the servomotor piston movement of the spool valves of the HPC for opening. |
| TZSV | TC time constant of the servomotor piston movement of the spool valves of the HPC for closing. |
| TCV | TC of the steam volume behind the control valves of the HPC. |
| TCS | TC of the steam volume behind the control valves of the MPC. |
| TCN | TC of the steam volume behind the control valves of the LPC. |
| TSHAFT | TC of turbine rotor. |
| TPP | TC of reheater. |
| TGO | TC of elastic feedback control of MPC control values. |
| TDM | TC of dynamic correction of the slow-acting power control loop. |
| TCHK, KCHK | TC and GR of frequency correction of the fast-acting power control loop |
| TDK | TC of dynamic correction of the fast-acting power control loop. |
| TIM, KIM | TC and GR of power meter. |
| TIDP, KIDP | TC and GR of boiler pressure integral controller. |
| TDP, KDP | TC and GR of changes in steam consumption from the collector. |
| TKT, KKT | TC and GR steam pipeline between boiler and turbine. |
| TDT | TC of dynamic correction of the boiler heat control circuit by pressure. |
| TK | TC of steam-generating unit. |
| TT, KT | TC and GR of fuel supply line. |
| TIR, KIR | TC and GR of integrated fuel regulator of a boiler unit. |
| TSN, KSN | TC and GR of boiler capacity due to changes in the operation mode of auxiliary equipment. |
| TFM, KFM | TC and GR of frequency meter. |
| KM0 | turbine torque perturbation modeling coefficient. |
| KCV, KCS, KCN | coefficients determining the share of the turbine torque due to the HPC, MPC and LPC. |
| Kp0 | fresh steam pressure coefficient (p0) in the CVD. |
| KVZD, KSZD | coefficients determining the initial positions of control valves of HPC, MPC and LPC. |
| KPP | GR of reheater. |
| KOZV, KOZS | coefficients of negative rigid feedback of the control system of control valves of HPC, MPC with LPC. |
| KRDV, KRDS | control coefficients of control valves of HPC and MPC with LPC of the steam turbine with industrial and heat extraction of steam. |
| KRS | coefficient of speed controller. |
| K∆pT | coefficient of power change due to fresh steam pressure (∆pT). |
| KDPK | coefficient of the power control for condensing turbines. |
| KARCHM | power control coefficient by the signal from the LFC (∆p ARCHM). |
| KGN | set point value coefficient of the power unit (PGN). |
| KPA | dynamic correction coefficient of the fast-acting power regulator. |
| KKOL | GR of collector. |
| KPDP | coefficient of the proportional pressure regulator of the boiler. |
| KPC | coefficient for determining the initial value of steam pressure in the collector (p0c). |
| KPTR | transfer coefficient between the pressure change in the collector (∆pPTR) and the corresponding deviation of steam flow rate (∆D). |
| KCHN, KCHV, KD0, KD, KDV | coefficients specifying the type and mode of operation of the simulated primary motor. |
References
- Arakelyan, E.K.; Kosoy, A.A.; Mezin, S.V. Improvement in the Participation of PGU-450 in the Regulation of Energy System Frequency and Power. In Proceedings of the 2020 International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon), Vladivostok, Russia, 06–09 October 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Jose, A.V.; Sunitha, R.; Deepak, M. Analysis of Variation in Steam Turbine Time Constant on Dynamic Frequency Regulation of a Deregulated Power System. In Proceedings of the 2019 IEEE 2nd International Conference on Power and Energy Applications (ICPEA), Singapore, 27–30 April 2019; pp. 17–21. [Google Scholar] [CrossRef]
- Saleh, B.; Yousef, A.M.; Ebeed, M.; Abo-Elyousr, F.K.; Elnozahy, A.; Mohamed, M.; Abdelwahab, S.A.M. Design of PID Controller with Grid Connected Hybrid Renewable Energy System Using Optimization Algorithms. J. Electr. Eng. Technol. 2021, 16, 3219–3233. [Google Scholar] [CrossRef]
- Yao, Y.; Gong, X.; Xin, H.; Zhao, L.; Song, S. Optimized Design of Steam Turbine Control System. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 06–08 November 2020; pp. 7063–7067. [Google Scholar] [CrossRef]
- Prioste, F.B.; Mendes, P.P.C.; Ferreira, C. Power system transient stability enhancement by fast valving. In Proceedings of the 2004 IEEE/PES Transmision and Distribution Conference and Exposition: Latin America (IEEE Cat. No. 04EX956), Sao Paulo, Brazil, 08–11 November 2004; pp. 639–644. [Google Scholar] [CrossRef]
- Dong, C.; Wang, B.; Sun, Y.; Wang, X. On effective rapid startup of 300 MW steam turbine unit. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 803–808. [Google Scholar] [CrossRef]
- Pertl, M.; Weckesser, T.; Rezkalla, M.; Marinelli, M. Transient stability improvement: A review and comparison of conventional and renewable-based techniques for preventive and emergency control. Electr. Eng. 2018, 100, 1701–1718. [Google Scholar] [CrossRef]
- Patel, R.; Bhatti, T.S.; Kothari, D.P. Improvement of Power System Transient Stability Using Fast Valving: A Review. Electr. Power Compon. Syst. 2001, 29, 927–938. [Google Scholar] [CrossRef]
- Cai, Y.; Li, W.; Zhang, B.; Wu, W.; Sheng, D.; Chen, J. Reliable Analysis on Fast Valving of Ultra-Supercritical Unit under Transient Fault Conditions. Am. Soc. Mech.Eng. Power Div. 2017, 2. [Google Scholar] [CrossRef]
- Kielian, M.; Lis, R. Turbine Fast Valving Study by the Use of a Steam Turbine Real-Time Simulator. In Proceedings of the 22nd International Conference Electronics, Palanga, Lithuania, 18–20 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Cho, J. Power system transient stability enhancement by coordinated operation of EVA and SPS. In Proceedings of the Transmission & Distribution Conference & Exposition: Asia and Pacific, Seoul, Republic of Korea, 26–30 October 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Moiseichenkov, A.N.; Senyuk, M.D.; Kovalenko, P.Y.; Dmitrieva, A.A. The Technique of Calculating a Steam Turbine Power For Characterization of The Turbine Fast Valving. In Proceedings of the International Conference on Electrotechnical Complexes and Systems (ICOECS), Ufa, Russia, 16–18 November 2021; pp. 79–82. [Google Scholar] [CrossRef]
- Patel, R.; Bhatti, T.S.; Kothari, D.P. Improvement of power system transient stability by coordinated operation of fast valving and braking resistor. Proc. Inst. Elect. Eng. Gen. Transm. Distrib. 2003, 150, 311–316. [Google Scholar] [CrossRef]
- Karady, G.G.; Daoud, A.A.; Mohamed, M.A. On-line transient stability enhancement using multi-agent technique. In Proceedings of the IEEE Power Engineering Society Winter Meeting (Cat. No. 02CH37309), New York, NY, USA, 27–31 January 2002; pp. 893–899. [Google Scholar] [CrossRef]
- Karady, G.G.; Mohamed, M.A. Improving transient stability using fast valving based on tracking rotor-angle and active power. In Proceedings of the IEEE Power Engineering Society Summer Meeting, Chicago, IL, USA, 21–25 July 2002; pp. 1576–1581. [Google Scholar] [CrossRef]
- Robak, S.; Machowski, J.; Skwarski, M. Enhancement of power system stability by real-time prediction of instability and early activation of steam turbine fast valving. Energy Rep. 2022, 8, 7704–7711. [Google Scholar] [CrossRef]
- Machowski, J.; Lubosny, Z.; Bialek, J.W.; Bumby, J.R. Power System Dynamics: Stability and Control; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Senyuk, M.D.; Moiseichenkov, A.; Kovalenko, P.; Dmitrieva, A.A. Adap-tive Algorithm for Steam Turbine Fast Valving Based on the Equal Area Criterion and Synchrophasor Measurements. In Proceedings of the 2021 International Conference on Electrotechnical Complexes and Systems (ICOECS), Ufa, Russia, 26–29 October 2021; pp. 68–73. [Google Scholar] [CrossRef]
- Molina-Cabrera, A.; Ríos, M.A.; Besanger, Y.; Hadjsaid, N.; Montoya, O.D. Latencies in power systems: A database-based time-delay compensation for memory controllers. Electronics 2021, 10, 208. [Google Scholar] [CrossRef]
- McLaren, P.G.; Kuffel, R.; Wierckx, R.; Giesbrecht, J.; Arendt, L. A real time digital simulator for testing relays. IEEE Trans. Power Deliv. 1992, 7, 207–213. [Google Scholar] [CrossRef]
- Andreev, M.V.; Gusev, A.S.; Ruban, N.Y.; Suvorov, A.A.; Ufa, R.A.; Askarov, A.B.; Bemš, J.; Králík, T. Hybrid Real-Time Simulator of Large-Scale Power Systems. IEEE Trans. Power Syst. 2019, 34, 1404–1415. [Google Scholar] [CrossRef]
- Muljadi, E.; Zhang, Y.C.; Gevorgian, V.; Kosterev, D. Understanding dynamic model validation of a wind turbine generator and a wind power plant. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Carreras, B.A.; Newman, D.E.; Dobson, I. Does size matter? Chaos Interdiscip. J. Nonlinear Sci. 2014, 24, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Watson, N.; Arrillage, J. Power Systems Electromagnetic Transients Simulation; The Institution of Engineering and Technology: London, UK, 2003; pp. 351–358. [Google Scholar]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations: Early Days in the Birth of Numerical Analysis, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2008; pp. 31–40. [Google Scholar]
- Hall, G.; Watt, J.M. Modern numerical methods for ordinary differential equations. Math. Comput. 1978, 32, 1322–1323. [Google Scholar] [CrossRef]
- Kosterev, D.; Taylor, C.; Mittelstadt, W. Model Validation for the August 10, 1996 WSCC System Outage. IEEE Trans. Power Syst. 1999, 14, 967–979. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Dinavahi, V. Multi-FPGA digital hardware design for detailed large-scale real-time electromagnetic transient simulation of power systems. IET Gener. Transm. Distrib. 2013, 7, 451–463. [Google Scholar] [CrossRef]
- Suvorov, A.; Gusev, A.; Ruban, N.; Andreev, M.; Askarov, A.; Ufa, R.; Razzhivin, I.; Kievets, A.; Bay, J. Potential Application of HRTSim for Comprehensive Simulation of Large-Scale Power Systems with Distributed Generation. Int. J. Emerg. Electr. Power Syst. 2019, 20, 20190075. [Google Scholar] [CrossRef]
- Lin, X.; Gole, A.M.; Yu, M. A wide-band multi-port system equivalent for real-time digital power system simulators. IEEE Trans. Power Syst. 2009, 24, 237–249. [Google Scholar] [CrossRef]
- Liang, Y.; Lin, X.; Gole, A.M.; Yu, M. Improved coherency-based wide-band equivalents for real-time digital simulators. IEEE Trans. Power Syst. 2011, 26, 1410–1417. [Google Scholar] [CrossRef]
- Shu, D.; Xie, X.; Jiang, Q.; Huang, Q.; Zhang, C. A novel interfacing technique for distributed hybrid simulations combining EMT and transient stability models. IEEE Trans. Power Deliv. 2018, 33, 130–140. [Google Scholar] [CrossRef]
- Andreev, M.V.; Sulaymanov, A.O. Platform based on Hybrid Real-Time Power System Simulator for development and research of Intelligent Power Systems with active-adaptive networks. In Proceedings of the IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1995. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Number |
|---|---|
| Generator | 51 |
| Transformers and autotransformers | 60 |
| Power lines | 114 |
| Loads | 75 |
| Controlled shunt reactor | 11 |
| Shunt reactor | 16 |
| Capacitor battery | 15 |
| Name of the Buses | Voltage, kV | Name of the Line | Current, kA | ||||
|---|---|---|---|---|---|---|---|
| Field Data | HRTSim | |δ|, % | Field Data | HRTSim | |δ|, % | ||
| B1 | 515.91 | 517.23 | 0.25 | L1 | 0.647 | 0.651 | 0.61 |
| B2 | 521.26 | 520.15 | 0.21 | L2 | 0.261 | 0.257 | 1.55 |
| B3 | 514.41 | 515.86 | 0.28 | L3 | 0.622 | 0.624 | 0.32 |
| B4 | 235.92 | 236.05 | 0.05 | L4 | 0.673 | 0.675 | 0.29 |
| B5 | 236.41 | 234.98 | 0.6 | L5 | 0.149 | 0.147 | 1.36 |
| B6 | 117.29 | 118.01 | 0.61 | L6 | 0.365 | 0.366 | 0.27 |
| B7 | 121.48 | 122.30 | 0.67 | ||||
| Name of Power Line | Active Power, MW | ||
|---|---|---|---|
| Field Data | HRTSim | |δ|, % | |
| L1 | 548.24 | 548.11 | 0.024 |
| L2 | 261.32 | 260.75 | 0.22 |
| L3 | 332.02 | 331.21 | 0.24 |
| L4 | 597.75 | 598.53 | 0.13 |
| L5 | 61.53 | 61.55 | 0.03 |
| L6 | 64.21 | 64.11 | 0.16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruban, N.; Kievets, A.; Andreev, M.; Suvorov, A. Turbine Fast Valving Setting Method Based on the Hybrid Simulation Approach. Energies 2023, 16, 1745. https://doi.org/10.3390/en16041745
Ruban N, Kievets A, Andreev M, Suvorov A. Turbine Fast Valving Setting Method Based on the Hybrid Simulation Approach. Energies. 2023; 16(4):1745. https://doi.org/10.3390/en16041745
Chicago/Turabian StyleRuban, Nikolay, Anton Kievets, Mikhail Andreev, and Aleksey Suvorov. 2023. "Turbine Fast Valving Setting Method Based on the Hybrid Simulation Approach" Energies 16, no. 4: 1745. https://doi.org/10.3390/en16041745
APA StyleRuban, N., Kievets, A., Andreev, M., & Suvorov, A. (2023). Turbine Fast Valving Setting Method Based on the Hybrid Simulation Approach. Energies, 16(4), 1745. https://doi.org/10.3390/en16041745