
A Modified Decentralized Droop Control Method to Eliminate Battery Short-Term Operation in a Hybrid Supercapacitor/Battery Energy Storage System



Abstract
:1. Introduction
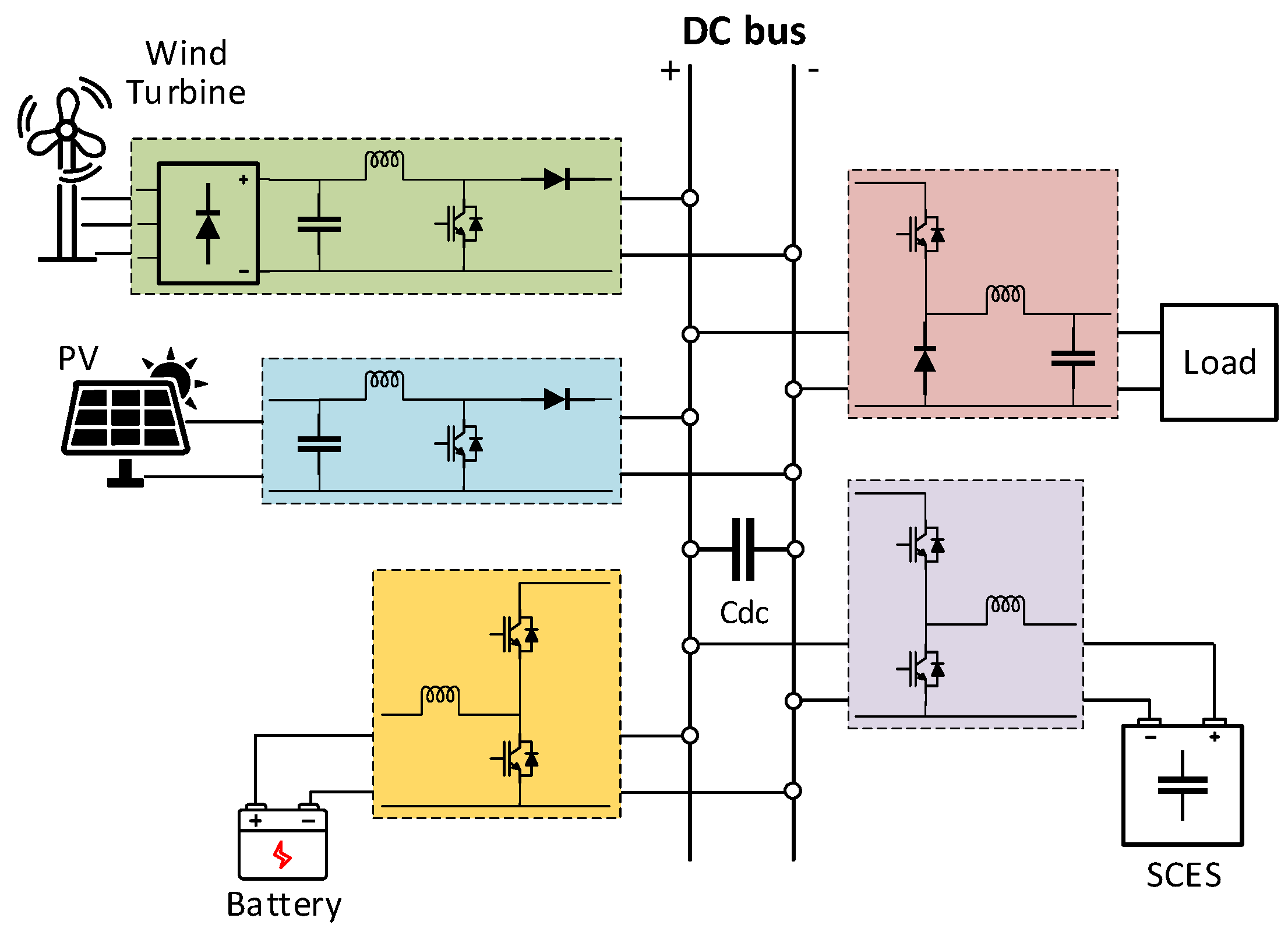
2. System Description and Modeling
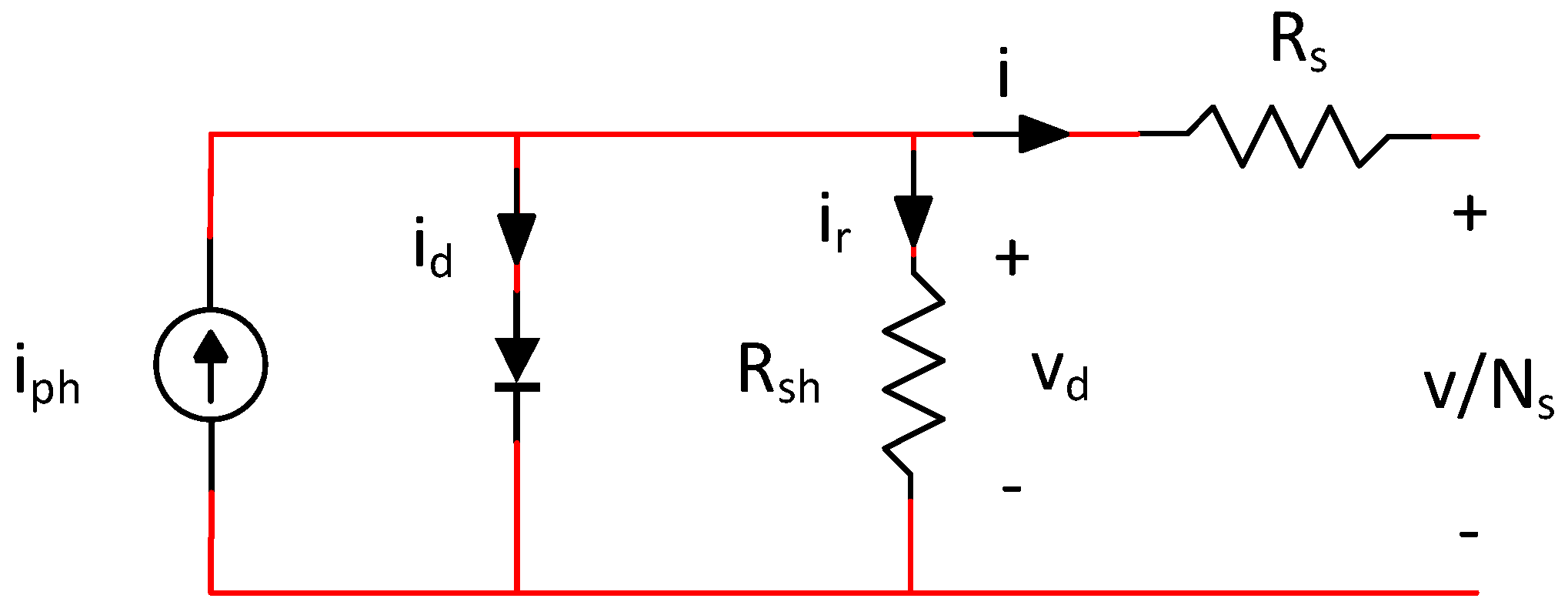
2.1. The Solar PV System
2.2. The WTG System
2.3. The SCES System
2.4. The Battery System
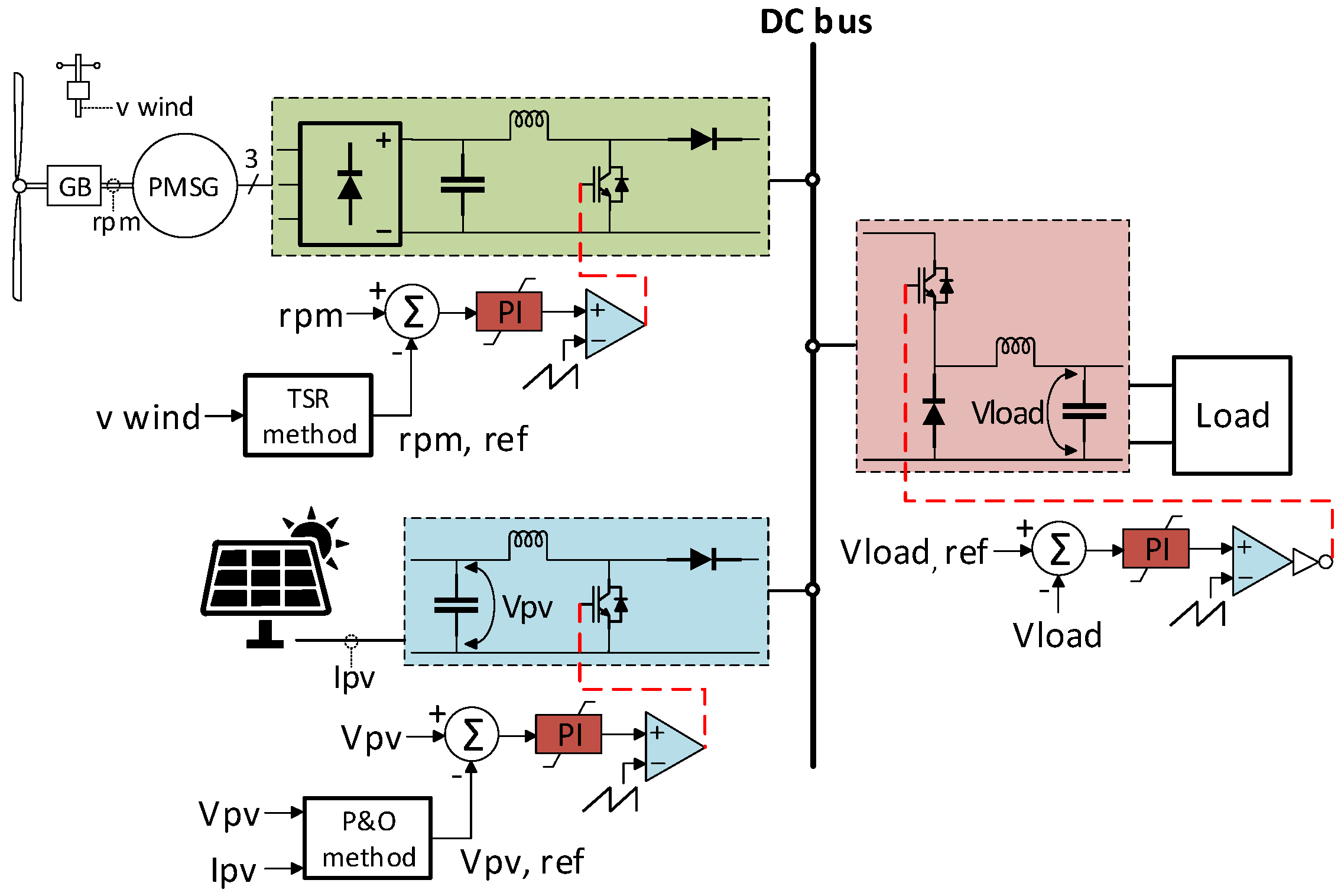
3. Control Techniques
3.1. The Control Method for the PV System
3.2. The Control Method for the WTG System
3.3. The Control Method for the Load
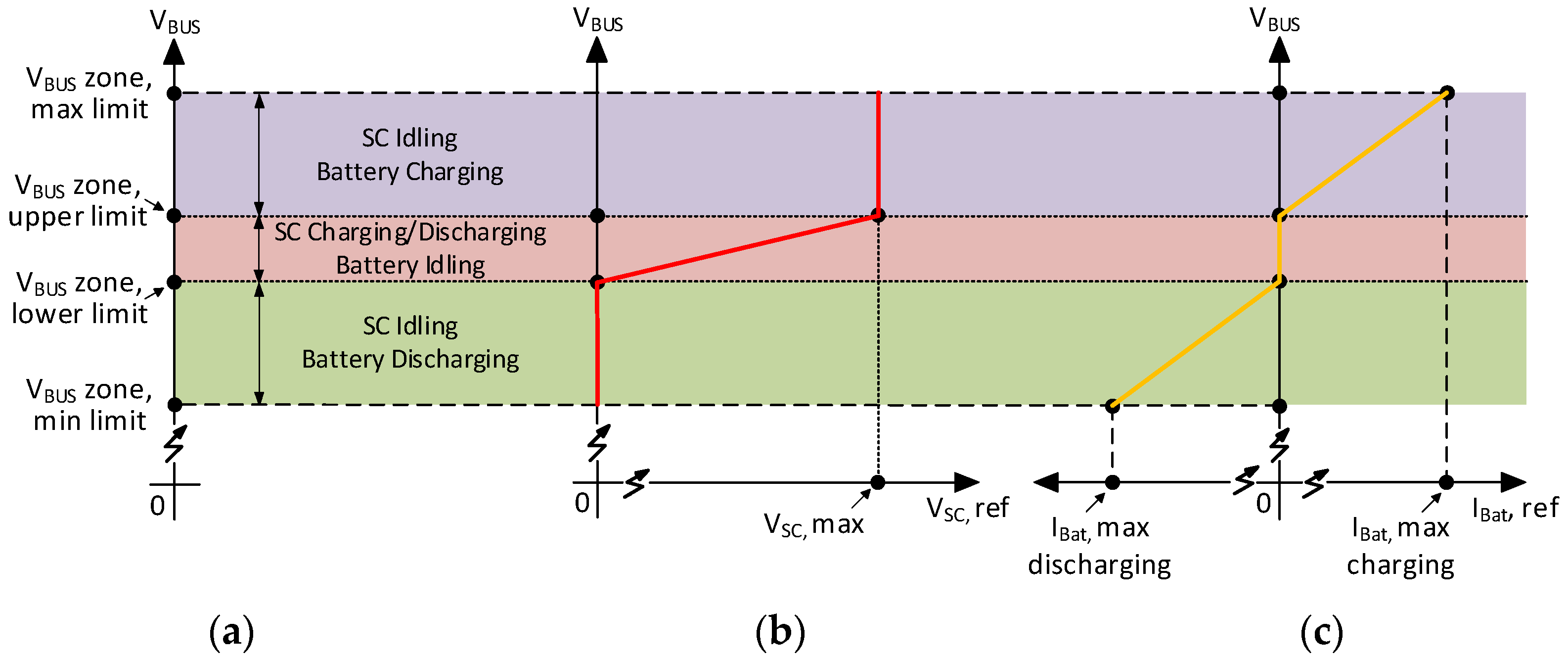
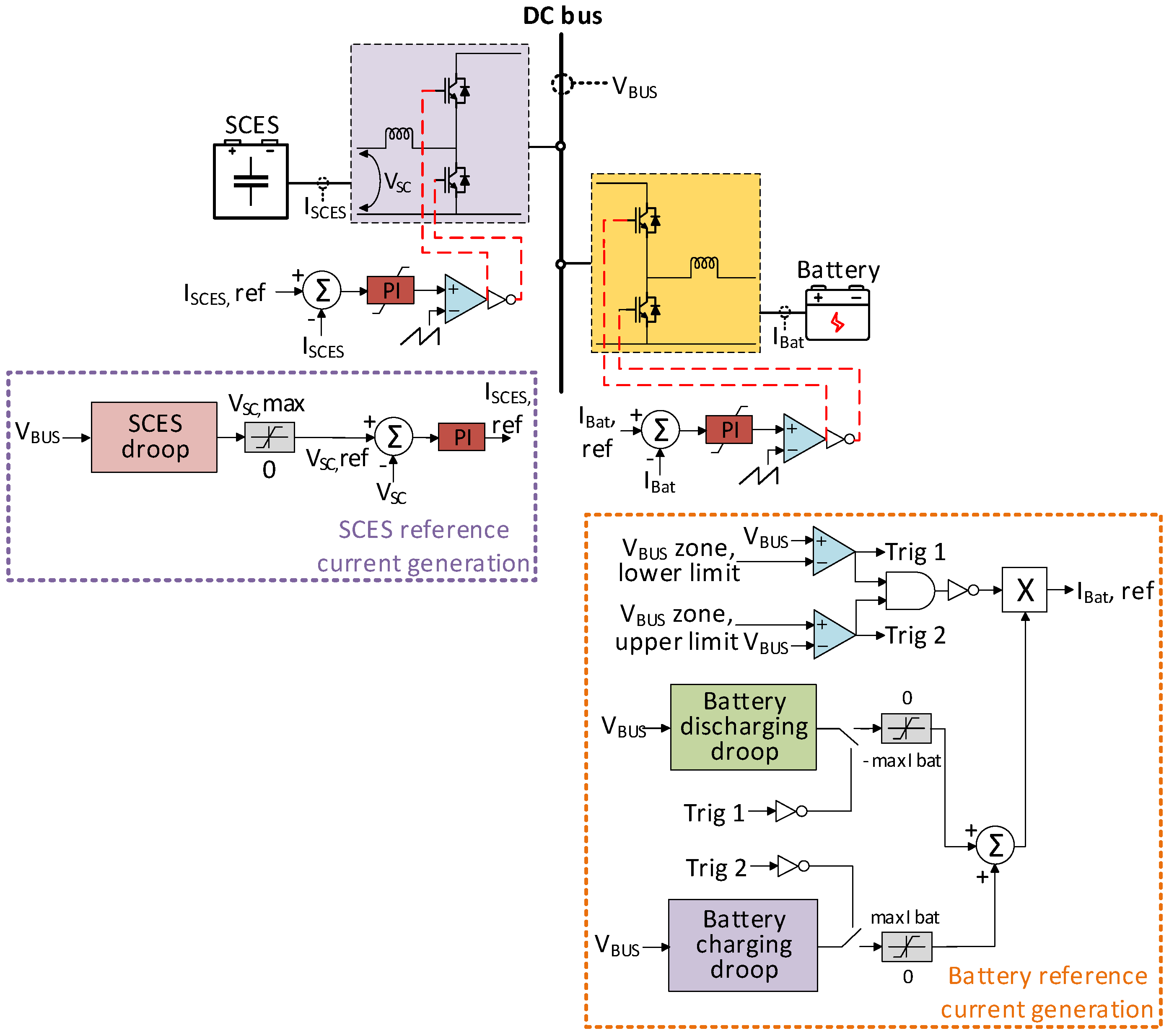
3.4. The Control Method for the SCES/Battery HESS
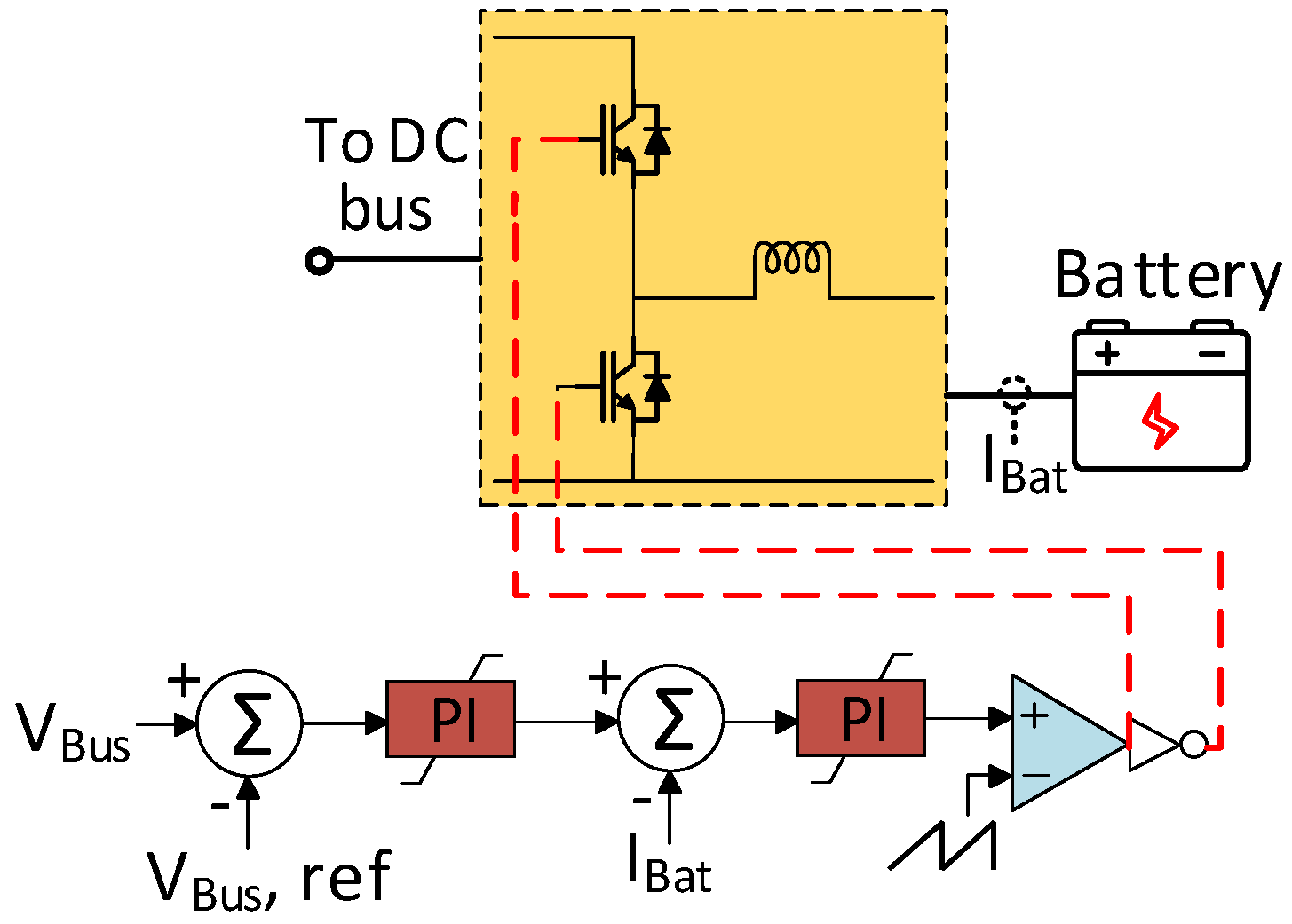
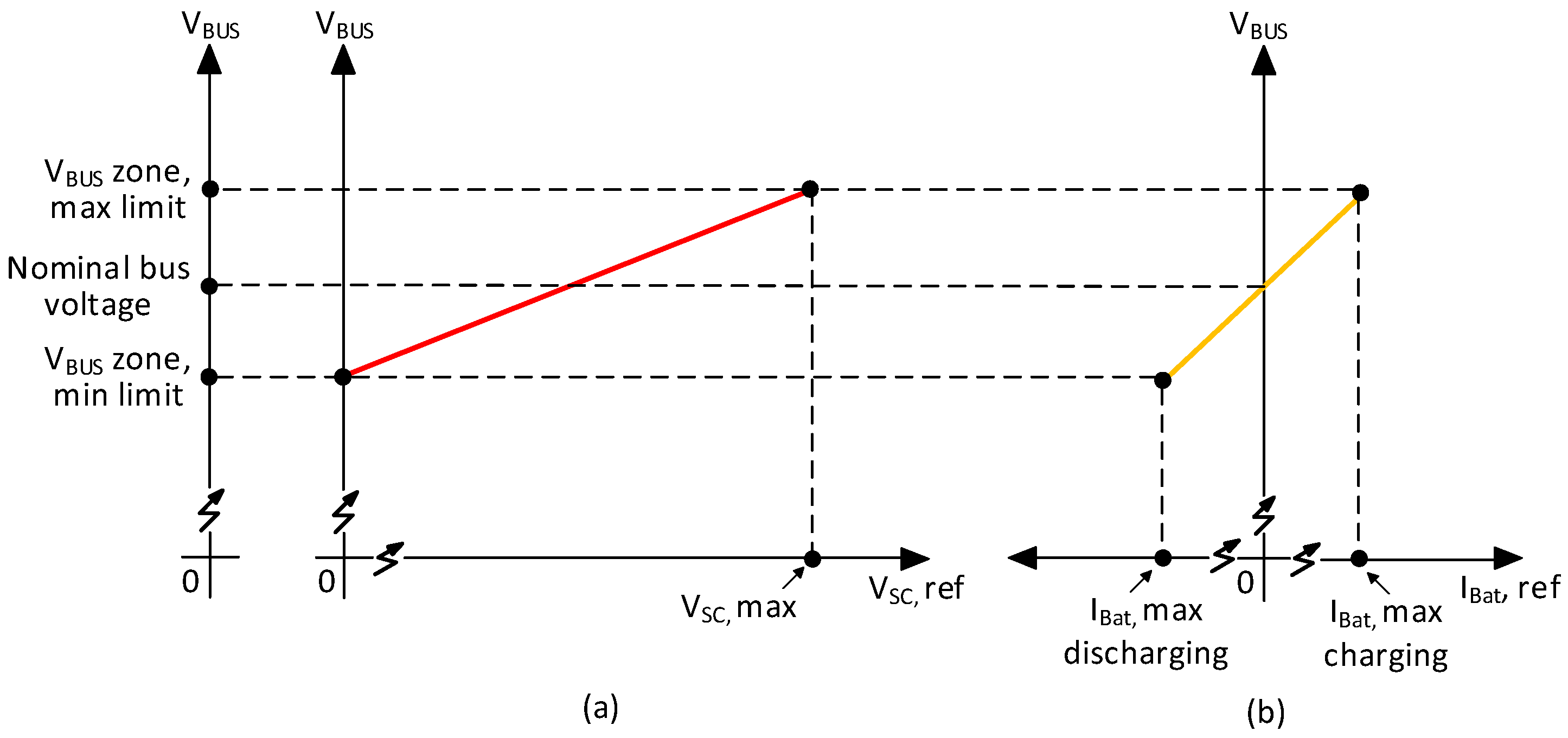
3.5. The Control Method for the Battery in the Battery-Only System Used for Comparison
3.6. The Classical Droop Control Method for the SCES/Battery HESS Used for Comparison
4. Simulation Results and Discussion
4.1. Comparison with a BOS
4.1.1. Case 1: Operation with an Intermediate SCES SoC Level
4.1.2. Case 2: Operation with a High SCES SoC Level
4.1.3. Case 3: Operation with a Low SCES SoC Level
4.1.4. Comparison among the Previous Cases
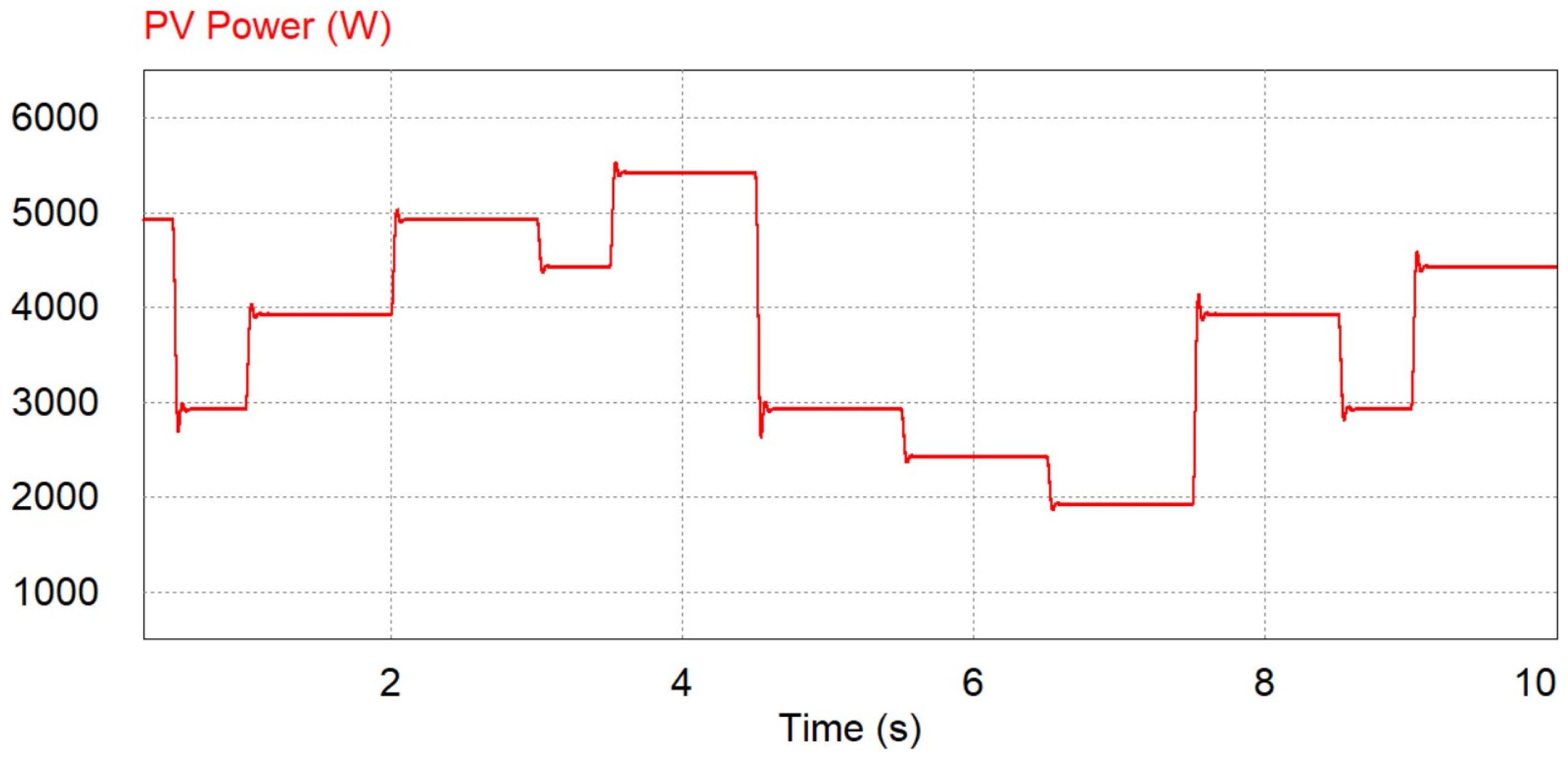
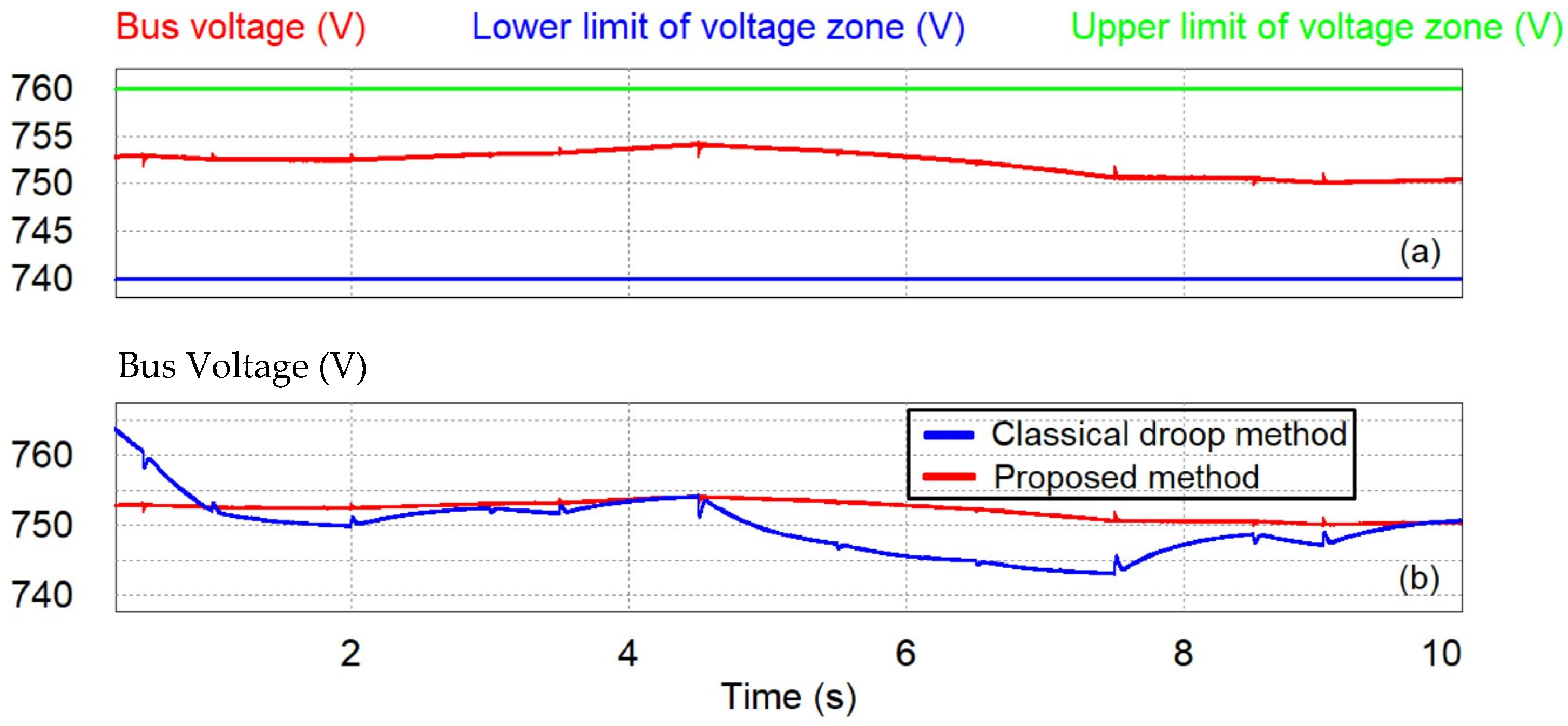
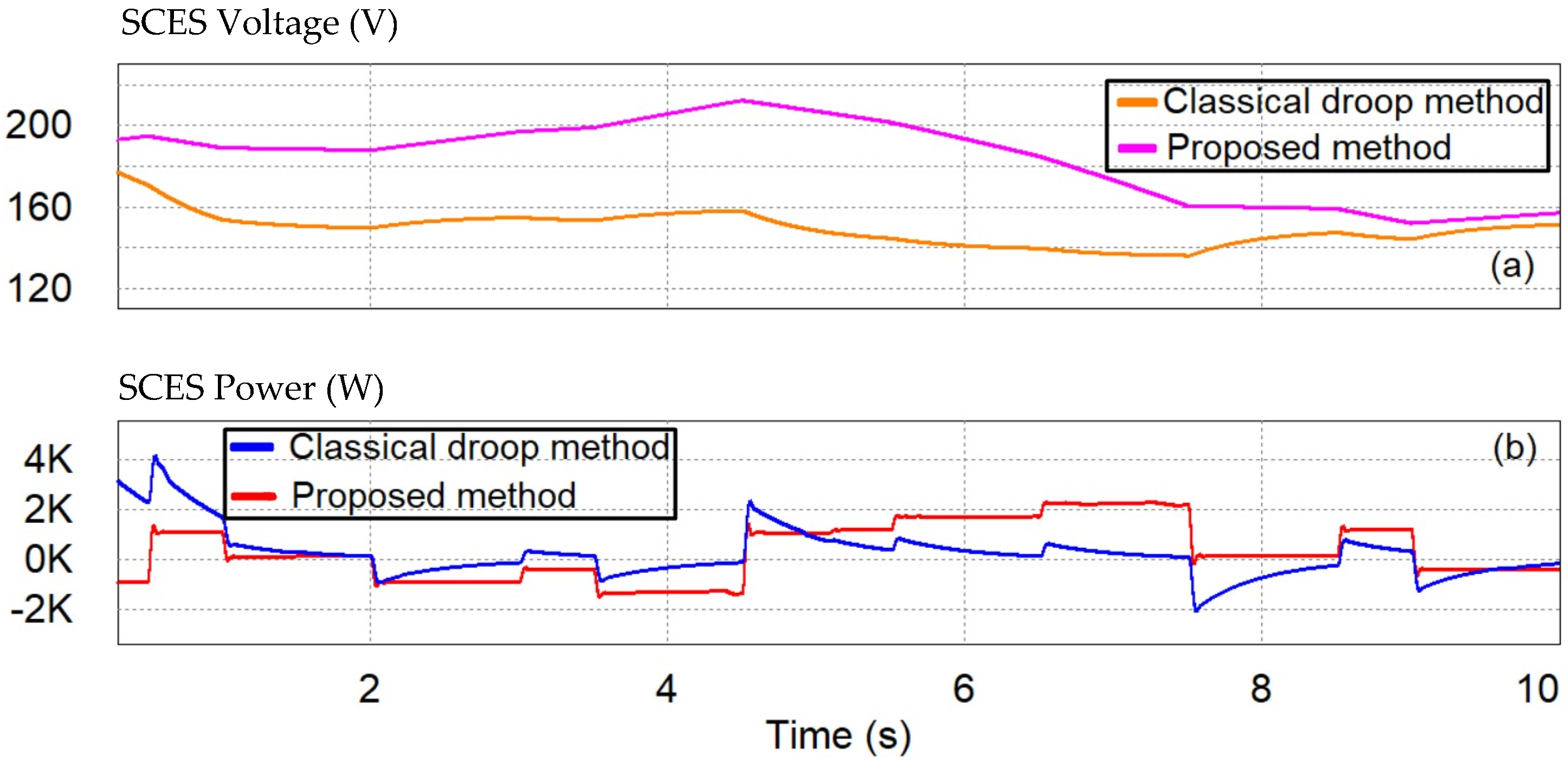
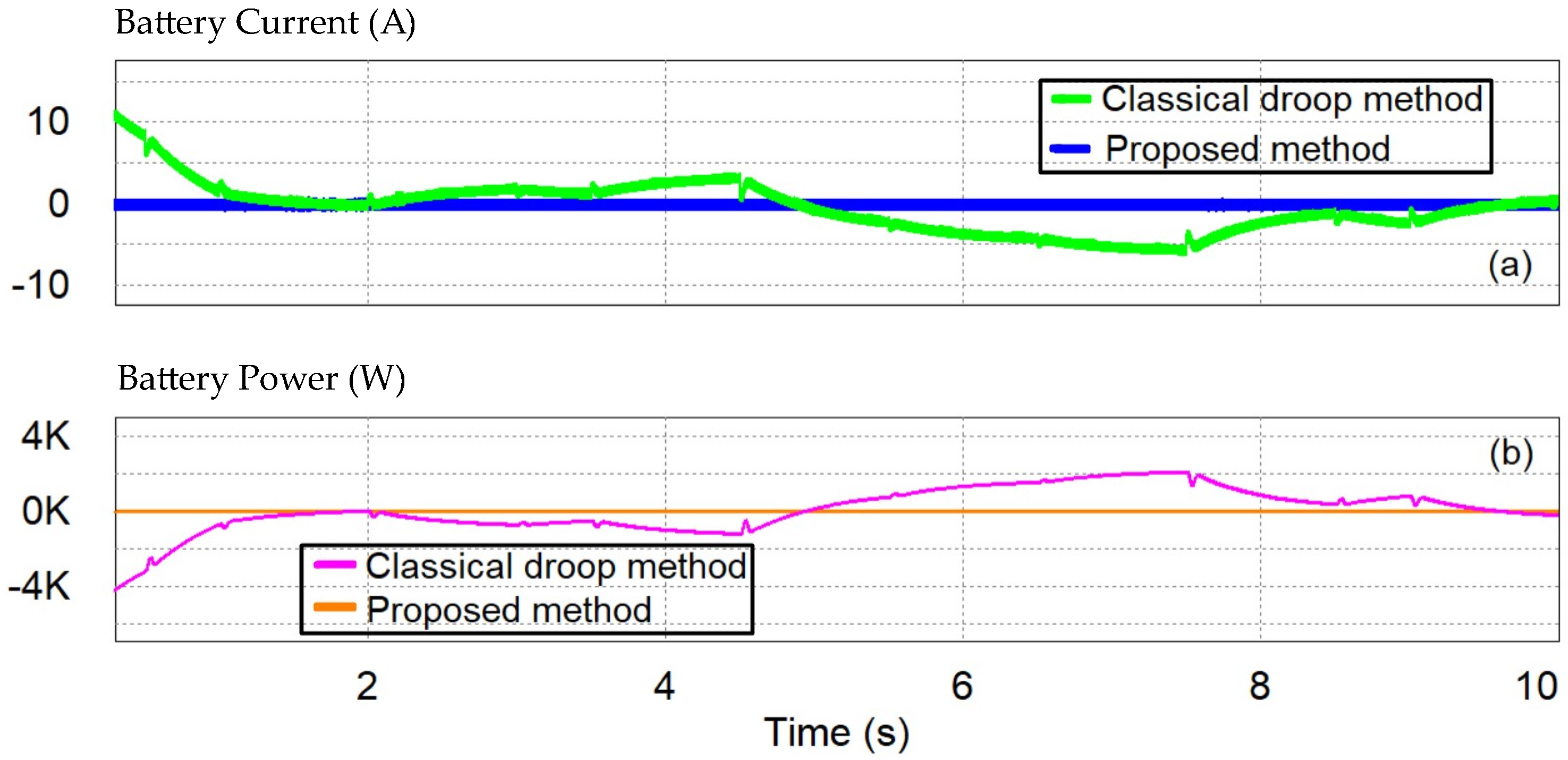
4.2. Comparison with the Classical Droop Technique
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tan, K.M.; Babu, T.S.; Ramachandaramurthy, V.K.; Kasinathan, P.; Solanki, S.G.; Raveendran, S.K. Empowering smart grid: A comprehensive review of energy storage technology and application with renewable energy integration. J. Energy Storage 2021, 39, 102591. [Google Scholar] [CrossRef]
- Sebestyén, V. Renewable and Sustainable Energy Reviews: Environmental impact networks of renewable energy power plants. Renew. Sustain. Energy Rev. 2021, 151, 111626. [Google Scholar] [CrossRef]
- A European Green Deal. Available online: https://ec.europa.eu/info/strategy/priorities-2019-2024/european-green-deal_en (accessed on 11 January 2023).
- Oureilidis, K.; Malamaki, K.-N.; Gallos, K.; Tsitsimelis, A.; Dikaiakos, C.; Gkavanoudis, S.; Cvetkovic, M.; Mauricio, J.M.; Ortega, J.M.M.; Ramos, J.L.; et al. Ancillary Services Market Design in Distribution Networks: Review and Identification of Barriers. Energies 2020, 13, 917. [Google Scholar] [CrossRef] [Green Version]
- Yang, N.; Paire, D.; Gao, F.; Miraoui, A. Power Management Strategies for Microgrid—A Short Review. In Proceedings of the 2013 IEEE Industry Applications Society Annual Meeting, Lake Buena Vista, FL, USA, 6–11 October 2013. [Google Scholar]
- Sun, J.; Lin, W.; Hong, M.; Loparo, K.A. Voltage Regulation of DC-Microgrid with PV and Battery. IEEE Trans. Smart Grid 2020, 11, 4662–4675. [Google Scholar] [CrossRef]
- Dragicevic, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids—Part II: A Review of Power Architectures, Applications, and Standardization Issues. IEEE Trans. Power Electron. 2016, 31, 3528–3549. [Google Scholar] [CrossRef] [Green Version]
- Ni, F.; Zheng, Z.; Xie, Q.; Xiao, X.; Zong, Y.; Huang, C. Enhancing resilience of DC microgrids with model predictive control based hybrid energy storage system. Int. J. Electr. Power Energy Syst. 2021, 128, 106738. [Google Scholar] [CrossRef]
- Luo, X.; Wang, J.; Dooner, M.; Clarke, J. Overview of current development in electrical energy storage technologies and the application potential in power system operation. Appl. Energy 2015, 137, 511–536. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Gee, A.M.; Zhang, M.; Yuan, W. Analysis of battery lifetime extension in a SMES-battery hybrid energy storage system using a novel battery lifetime model. Energy 2015, 86, 175–185. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; White, R.E. Capacity fade analysis of a lithium ion cell. J. Power Sour. 2008, 179, 793–798. [Google Scholar] [CrossRef]
- Ruan, H.; Barreras, J.V.; Engstrom, T.; Merla, Y.; Millar, R.; Wu, B. Lithium-ion battery lifetime extension: A review of derating methods. J. Power Sour. 2023, 563, 232805. [Google Scholar] [CrossRef]
- Ndiaye, A.; Locment, F.; De Bernardinis, A.; Sechilariu, M.; Redondo-Iglesias, E. A Techno-Economic Analysis of Energy Storage Components of Microgrids for Improving Energy Management Strategies. Energies 2022, 15, 1556. [Google Scholar] [CrossRef]
- Lee, N.; Nee, C.H.; Yap, S.S.; Tham, K.K.; You, A.H.; Yap, S.L.; Arof, A.K.B.M. Capacity Sizing of Embedded Control Battery–Supercapacitor Hybrid Energy Storage System. Energies 2022, 15, 3783. [Google Scholar] [CrossRef]
- Yaseen, M.; Khattak, M.A.K.; Humayun, M.; Usman, M.; Shah, S.S.; Bibi, S.; Hasnain, B.S.U.; Ahmad, S.M.; Khan, A.; Shah, N.; et al. A Review of Supercapacitors: Materials Design, Modification, and Applications. Energies 2021, 14, 7779. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Canizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Lin, X.; Zamora, R. Controls of hybrid energy storage systems in microgrids: Critical review, case study and future trends. J. Energy Storage 2022, 47, 103884. [Google Scholar] [CrossRef]
- Han, Y.; Zhang, K.; Li, H.; Coelho, E.A.; Guerrero, J.M. MAS-Based Distributed Coordinated Control and Optimization in Microgrid and Microgrid Clusters: A Comprehensive Overview. IEEE Trans. Power Electron. 2018, 33, 6488–6508. [Google Scholar] [CrossRef] [Green Version]
- Abhishek, A.; Ranjan, A.; Devassy, S.; Verma, B.K.; Ram, S.K.; Dhakar, A.K. Review of hierarchical control strategies for DC microgrid. IET Renew. Power Gener. 2020, 14, 1631–1640. [Google Scholar] [CrossRef]
- Kollimalla, S.K.; Mishra, M.K.; Ukil, A.; Gooi, H.B. DC Grid Voltage Regulation Using New HESS Control Strategy. IEEE Trans. Sustain. Energy 2017, 8, 772–781. [Google Scholar] [CrossRef]
- Sarojini, R.K.; Palanisamy, K.; Sanjeevikumar, P.; Nielsen, J.B.H. Inertia emulation control technique based frequency control of grid-connected single-phase rooftop photovoltaic system with battery and supercapacitor. IET Renew. Power Gener. 2020, 14, 1156–1163. [Google Scholar] [CrossRef]
- Jithin, S.; Rajeev, T. Novel adaptive power management strategy for hybrid AC/DC microgrids with hybrid energy storage systems. J. Power Electron. 2022, 22, 2056–2068. [Google Scholar] [CrossRef]
- Siad, S.B.; Iovine, A.; Damm, G.; Galai-Dol, L.; Netto, M. Nonlinear Hierarchical Easy-to-Implement Control for DC MicroGrids. Energies 2022, 15, 969. [Google Scholar] [CrossRef]
- Sidharthan, V.P.; Kashyap, Y.; Kosmopoulos, P. Adaptive-Energy-Sharing-Based Energy Management Strategy of Hybrid Sources in Electric Vehicles. Energies 2023, 16, 1214. [Google Scholar] [CrossRef]
- Li, J.; Xiong, R.; Mu, H.; Cornélusse, B.; Vanderbemden, P.; Ernst, D.; Yuan, W. Design and real-time test of a hybrid energy storage system in the microgrid with the benefit of improving the battery lifetime. Appl. Energy 2018, 218, 470–478. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Yang, Q.; Robinson, F.; Liang, F.; Zhang, M.; Yuan, W. Design and test of a new droop control algorithm for a SMES/battery hybrid energy storage system. Energy 2017, 118, 1110–1122. [Google Scholar] [CrossRef]
- POWERSIM User Manual. Available online: https://www.powersimtech.com/wp-content/uploads/2021/01/PSIMUser-Manual.pdf (accessed on 11 January 2023).
- Díaz-González, F.; Sumper, A.; Gomis-Bellmunt, O.; Villafáfila-Robles, R. A review of energy storage technologies for wind power applications. Renew. Sustain. Energy Rev. 2012, 16, 2154–2171. [Google Scholar] [CrossRef]
- Tremblay, O.; Dessaint, L.-A. Experimental Validation of a Battery Dynamic Model for EV Applications. World Electr. Veh. J. 2009, 3, 289–298. [Google Scholar] [CrossRef] [Green Version]
- de Brito, M.A.G.; Galotto, L.; Sampaio, L.P.; e Melo, G.d.A.; Canesin, C.A. Evaluation of the Main MPPT Techniques for Photovoltaic Applications. IEEE Trans. Ind. Electron. 2013, 60, 1156–1167. [Google Scholar] [CrossRef]
- Sera, D.; Mathe, L.; Kerekes, T.; Spataru, S.V.; Teodorescu, R. On the Perturb-and-Observe and Incremental Conductance MPPT Methods for PV Systems. IEEE J. Photovolt. 2013, 3, 1070–1078. [Google Scholar] [CrossRef]
- Kotb, K.M.; Elmorshedy, M.F.; Salama, H.S.; Dán, A. Enriching the stability of solar/wind DC microgrids using battery and superconducting magnetic energy storage based fuzzy logic control. J. Energy Storage 2022, 45, 103751. [Google Scholar] [CrossRef]
- Abdullah, M.A.; Yatim, A.H.M.; Tan, C.W.; Saidur, R. A review of maximum power point tracking algorithms for wind energy systems. Renew. Sustain. Energy Rev. 2012, 16, 3220–3227. [Google Scholar] [CrossRef]
- IEEE Recommended Practice for the Design and Application of Power Electronics in Electrical Power Systems. In IEEE Std 1662–2016 (Revision of IEEE Std 1662–2008); IEEE: Piscataway, NJ, USA, 2017; pp. 1–68.
- Salama, H.S.; Kotb, K.M.; Vokony, I.; Dán, A. The Role of Hybrid Battery–SMES Energy Storage in Enriching the Permanence of PV–Wind DC Microgrids: A Case Study. Eng 2022, 3, 207–223. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Maximum Power (Pmpp) | 4905 Wp |
| Assembly | 5S3P |
| Voltage at Pmax (Vmpp) | 273.5 V |
| Current at Pmax (Impp) | 17.94 A |
| Open-Circuit Voltage (Voc) | 324.5 V |
| Short-Circuit Current (Isc) | 19.38 A |
| Temperature Coefficient of Voc | −0.272%/°C or °K |
| Temperature Coefficient of Isc | 0.04%/°C or °K |
| Standard Test Conditions (STC) Sun irradiation/temperature | 1000 W/m2/25 °C |
| The WT | The PMSG | ||
|---|---|---|---|
| Parameter | Value | Parameter | Value |
| Rated power (Prat) | 6.3 kW | Rated power (Prat) | 6 kW |
| Cut-in wind speed (vcin) | 4 m/s | Rated torque (Trat) | 40 Nm |
| Rated wind speed (vrat) | 12 m/s | Rated speed (nrat) | 1461 rpm |
| Cut-out wind speed (vcout) | 24 m/s | Stator winding resistance (Rs) | 0.425 Ohm |
| Rotor blade diameter (D) | 5.132 m | Stator d-axis inductance (Ls,d) | 8.4 mH |
| Gearbox ratio | 4 | Stator q-axis inductance (Ls,q) | 8.4 mH |
| Optimal TSR | 8.18 | Flux linkage (Ψ) | 0.433 Wb |
| No. of pole pairs (P) | 5 | ||
| Moment of inertia (J) | 0.01197 kgm2 | ||
| Friction coefficient (B) | 0.001189 Nms | ||
| Parameter | Value |
|---|---|
| CSC | 0.5 F |
| Rated (max) voltage (VSC,max) | 300 V |
| Rated (max) energy (ESC,max) | 22.5 kJ |
| The Battery Cell | The Battery Pack | ||
|---|---|---|---|
| Parameter | Value | Parameter | Value |
| R | 0.075 Ohm | Chemistry | Li-ion |
| Q | 2.26 Ah | Maximum power (Pmax) | 21.6 kW |
| E0 | 3.7647 V | Assembly | 100S30P |
| A | 0.4283 V | Current constraints (Imax) | ±60 A |
| B | 3.7783 (Ah)−1 | Nominal voltage (Vnom) | 360 V |
| K | 0.01209 V/Ah | Typical capacity (Qtyp) | 67.5 Ah |
| Parameter | Value |
|---|---|
| Nominal bus voltage | 750 V (1 p.u.) |
| VBUS zone, lower limit | 740 V (0.9867 p.u.) |
| VBUS zone, upper limit | 760 V (1.0133 p.u.) |
| VBUS zone, min limit | 675 V (0.9 p.u.) |
| VBUS zone, max limit | 825 V (1.1 p.u.) |
| VSC, max | 300 V |
| IBat, max | ±60 A |
| DC bus capacitor | 6 mF |
| Switching frequency for the SCES | 10 kHz |
| Switching frequency for the battery | 10 kHz |
| Case | Parameter | BOS | SCES/Battery HESS |
|---|---|---|---|
| 1 | Maximum DC bus voltage deviation | 6.19 V | 3.39 V |
| Battery status | t ≤ 0.5 s, discharging 0.5 s < t ≤ 1.5 s, charging t > 1.5 s, discharging | Idling | |
| Battery current variations | 238 A/s @ 0.5 s 412 A/s @ 1.5 s | 0 | |
| 2 | Maximum DC bus voltage deviation | 4 V | 25.29 V |
| Battery status | Charging | t ≤ 1.27 s, idling t > 1.27 s, charging | |
| Battery current variations | 288 A/s @ 1 s | 479 A/s @ 1.27 s | |
| 3 | Maximum DC bus voltage deviation | 6.2 V | 20.2 V |
| Battery status | Discharging | t ≤ 1.25 s, idling t > 1.25 s, discharging | |
| Battery current variations | 436 A/s @ 1.5 s | 43.3 A/s @ 1.25 s 413 A/s @ 1.5 s |
| Parameter | Classical Droop Method | Proposed Droop Method |
|---|---|---|
| Maximum DC bus voltage deviation | 14 V | 4.47 V |
| Battery status | t ≤ 4.93 s, charging 4.93 s < t ≤ 9.63 s, discharging t > 9.63 s, charging | Idling |
| Maximum battery current variation | 14.7 A/s @ 0.5 s | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papageorgiou, P.; Oureilidis, K.; Tsakiri, A.; Christoforidis, G. A Modified Decentralized Droop Control Method to Eliminate Battery Short-Term Operation in a Hybrid Supercapacitor/Battery Energy Storage System. Energies 2023, 16, 2858. https://doi.org/10.3390/en16062858
Papageorgiou P, Oureilidis K, Tsakiri A, Christoforidis G. A Modified Decentralized Droop Control Method to Eliminate Battery Short-Term Operation in a Hybrid Supercapacitor/Battery Energy Storage System. Energies. 2023; 16(6):2858. https://doi.org/10.3390/en16062858
Chicago/Turabian StylePapageorgiou, Pavlos, Konstantinos Oureilidis, Anna Tsakiri, and Georgios Christoforidis. 2023. "A Modified Decentralized Droop Control Method to Eliminate Battery Short-Term Operation in a Hybrid Supercapacitor/Battery Energy Storage System" Energies 16, no. 6: 2858. https://doi.org/10.3390/en16062858
APA StylePapageorgiou, P., Oureilidis, K., Tsakiri, A., & Christoforidis, G. (2023). A Modified Decentralized Droop Control Method to Eliminate Battery Short-Term Operation in a Hybrid Supercapacitor/Battery Energy Storage System. Energies, 16(6), 2858. https://doi.org/10.3390/en16062858