
Modeling and Harmonic Analysis of a Fractional-Order Zeta Converter

Abstract
:1. Introduction
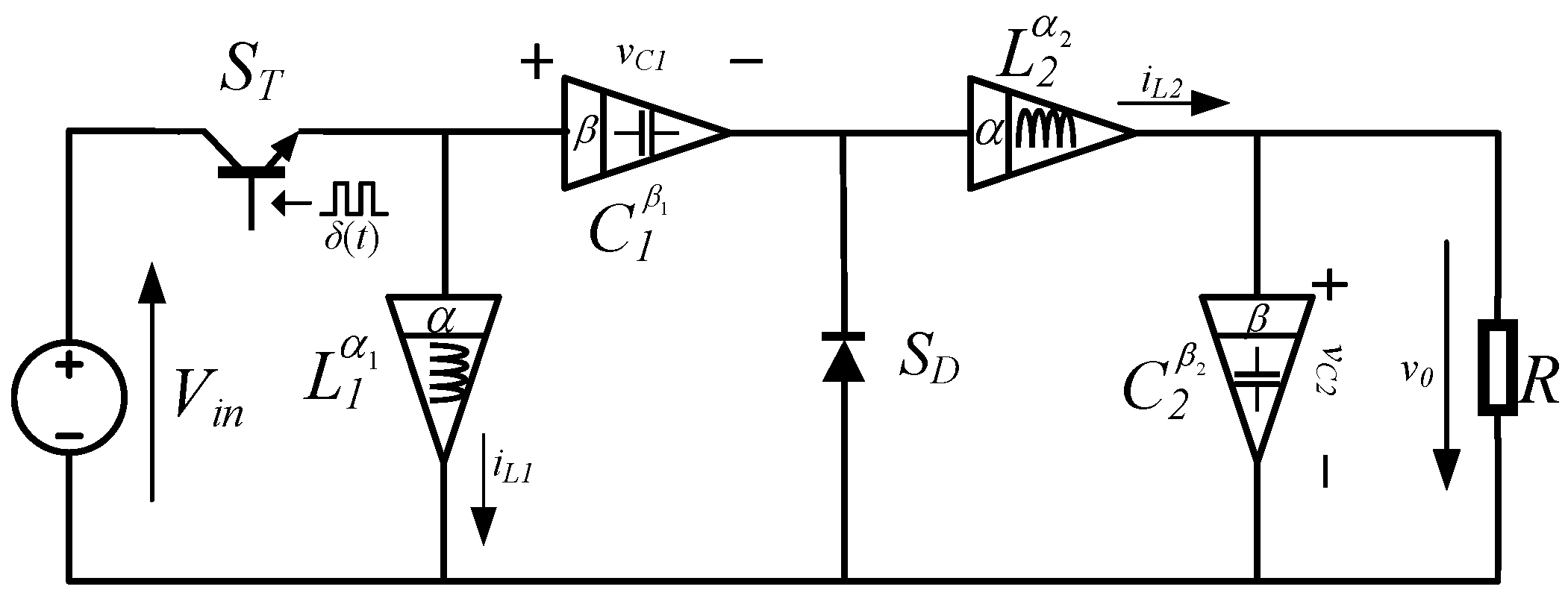
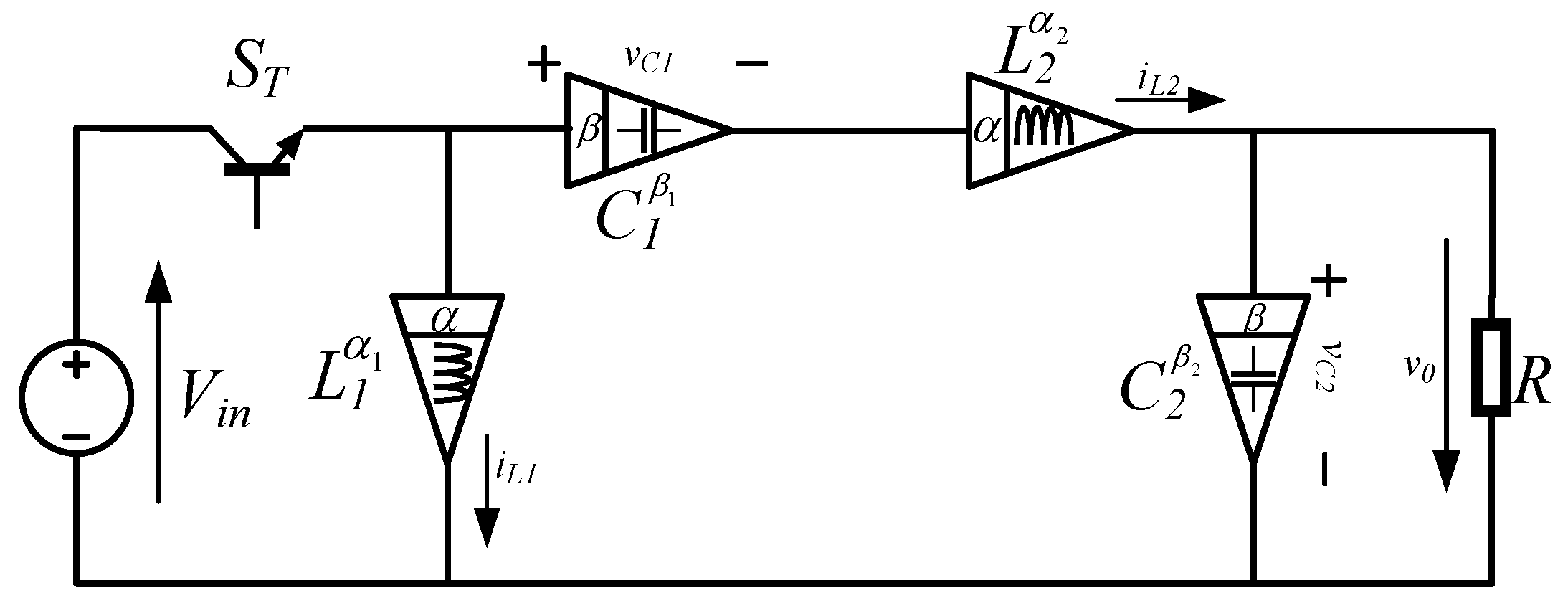
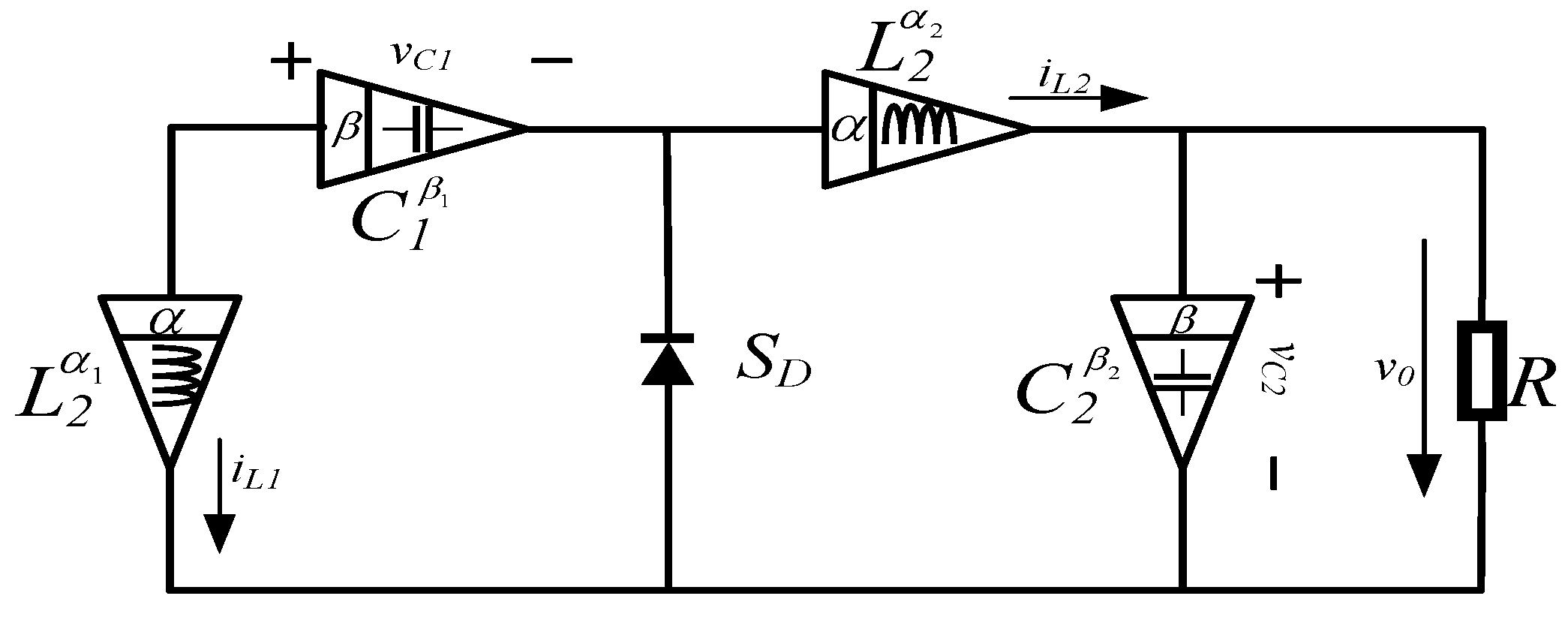
2. Mathematical Model of the Fractional CCM Zeta Transformer
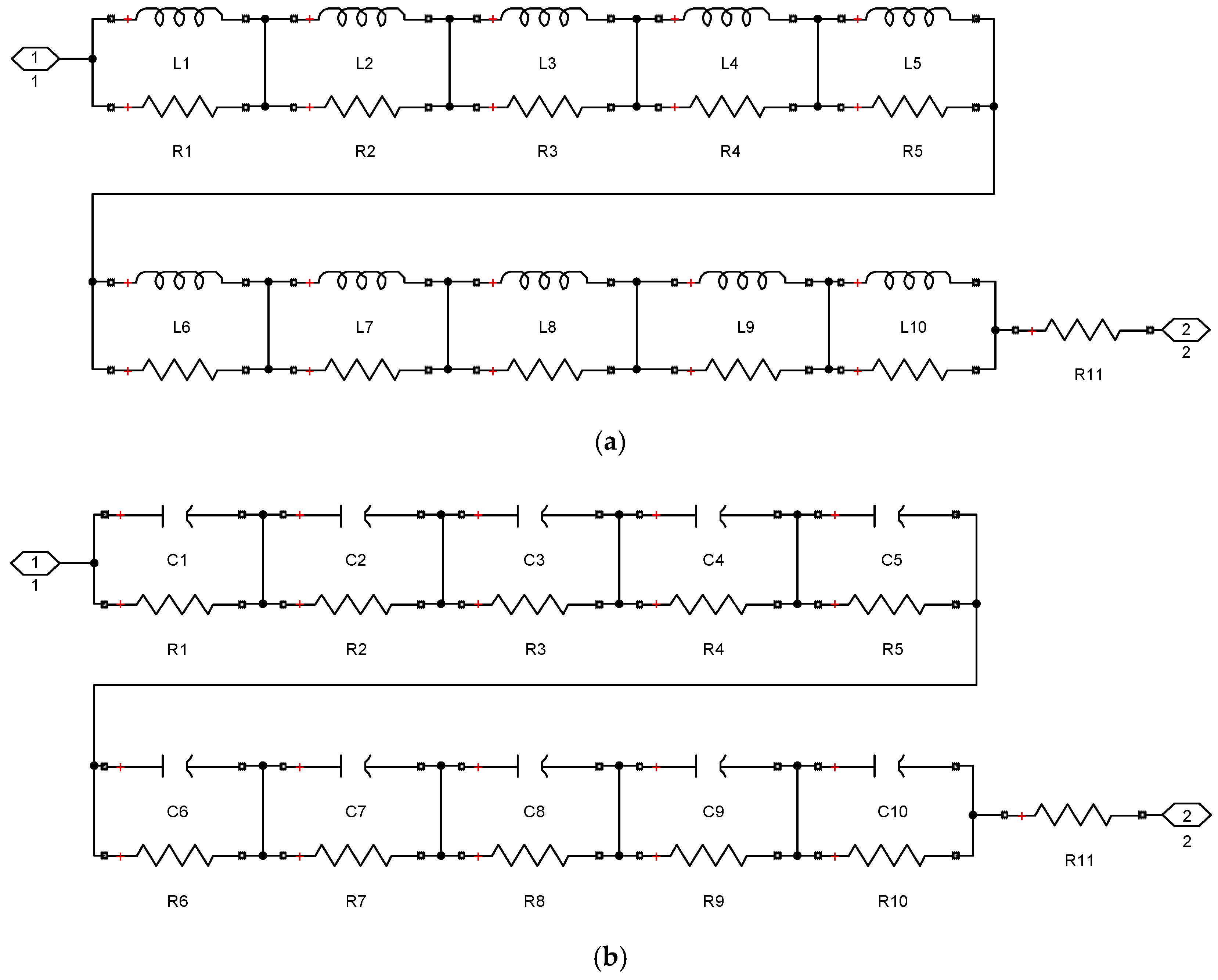
3. Equivalent Model of Converter Based on ESPM
3.1. Principle of the ESPM
3.2. Steady-State Analytical Solution of Fractional-Order CCM Zeta Converter
3.2.1. Solving the Main Oscillation Component x0
3.2.2. Solving the First-Order Correction Amount x1
3.2.3. Solve the Second-Order Correction Amount x2
3.2.4. Solving the Third-Order Correction Amount x3
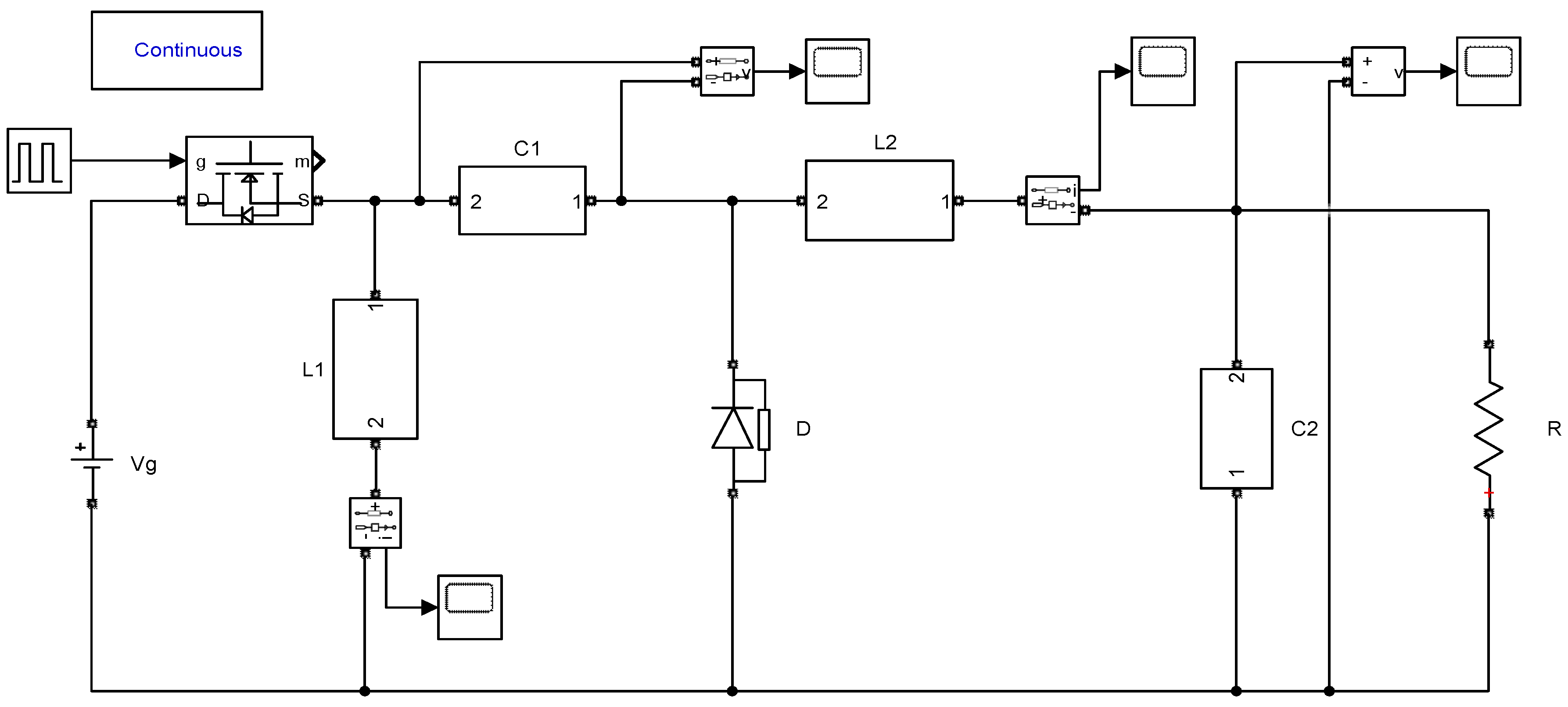
4. Simulation Comparison and Validation of Different Methods
4.1. Design Equation of Zeta Converter
4.2. DC Components and Ripple Analysis
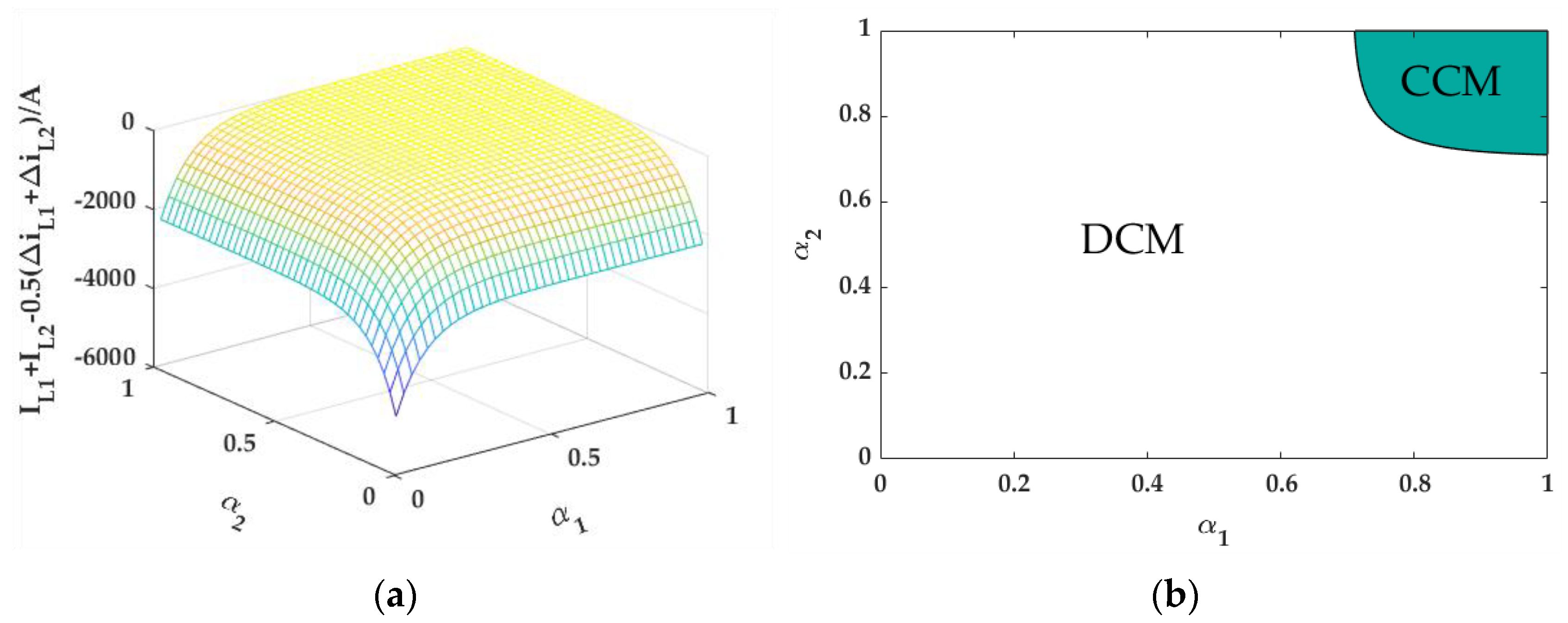
4.3. Fractional-Order Zeta Converter CCM Discriminant
5. Analysis of Harmonic Components in Different Orders
6. Conclusions
- (1)
- ESPM can avoid the discussion of the applicability of several fractional calculus definitions to the upper and lower limits of the integration under different circumstances, and overcome the problem that it is difficult for the fractional system to obtain specific expressions. The obtained solutions conclude practical physical significance, and the analysis results are consistent with those obtained by the Oustaloup’s filter-based approximation method.
- (2)
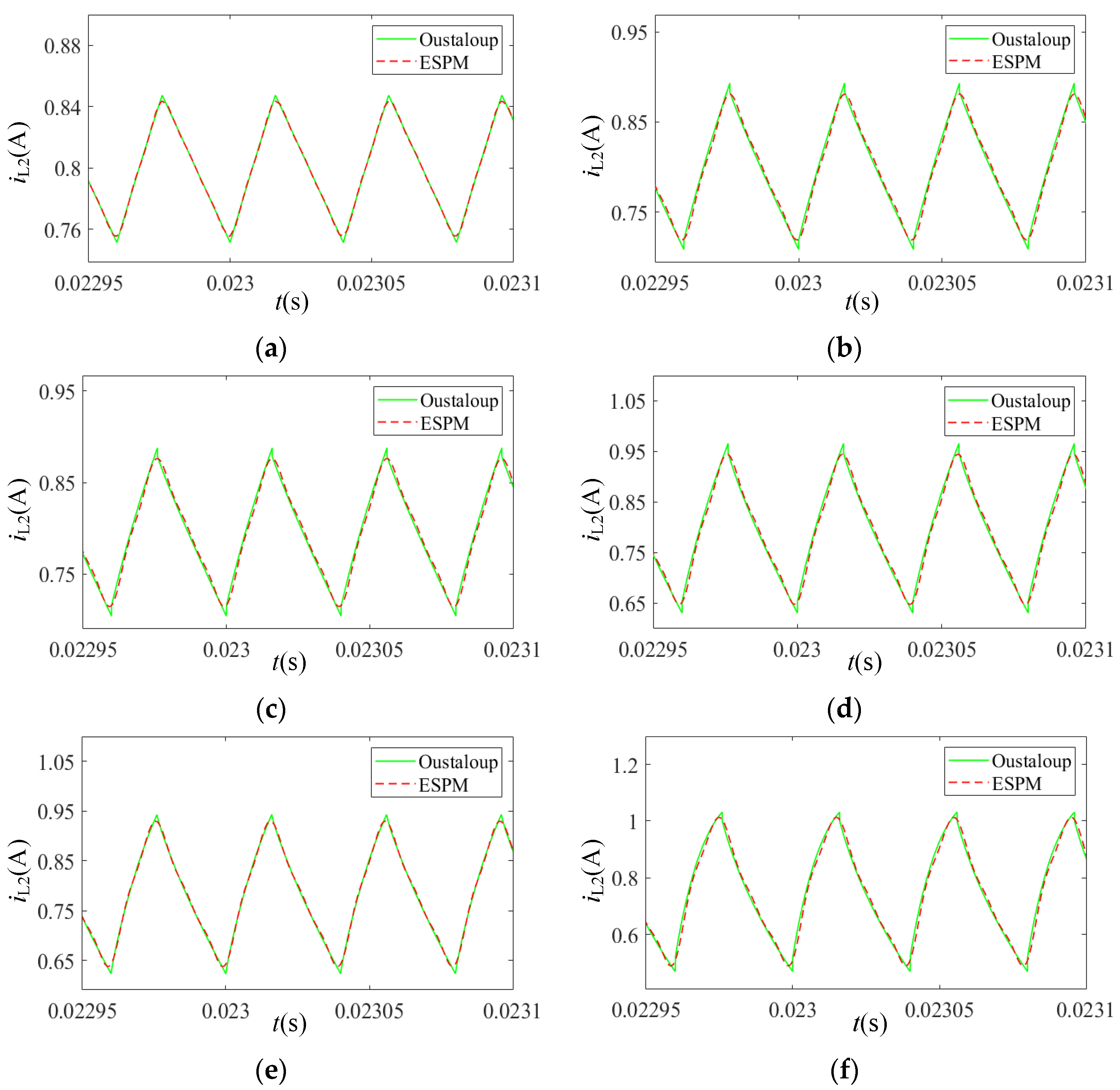
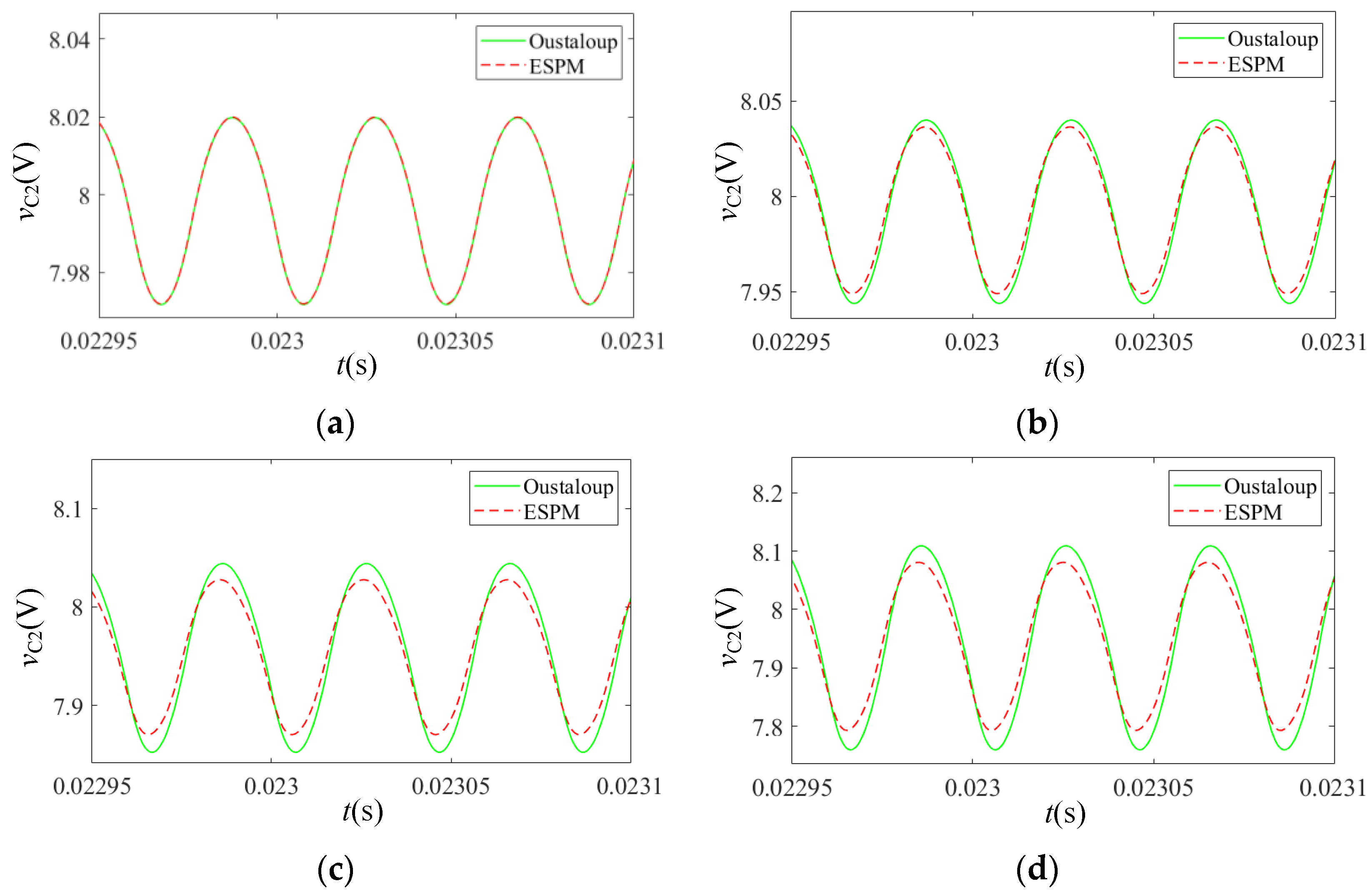
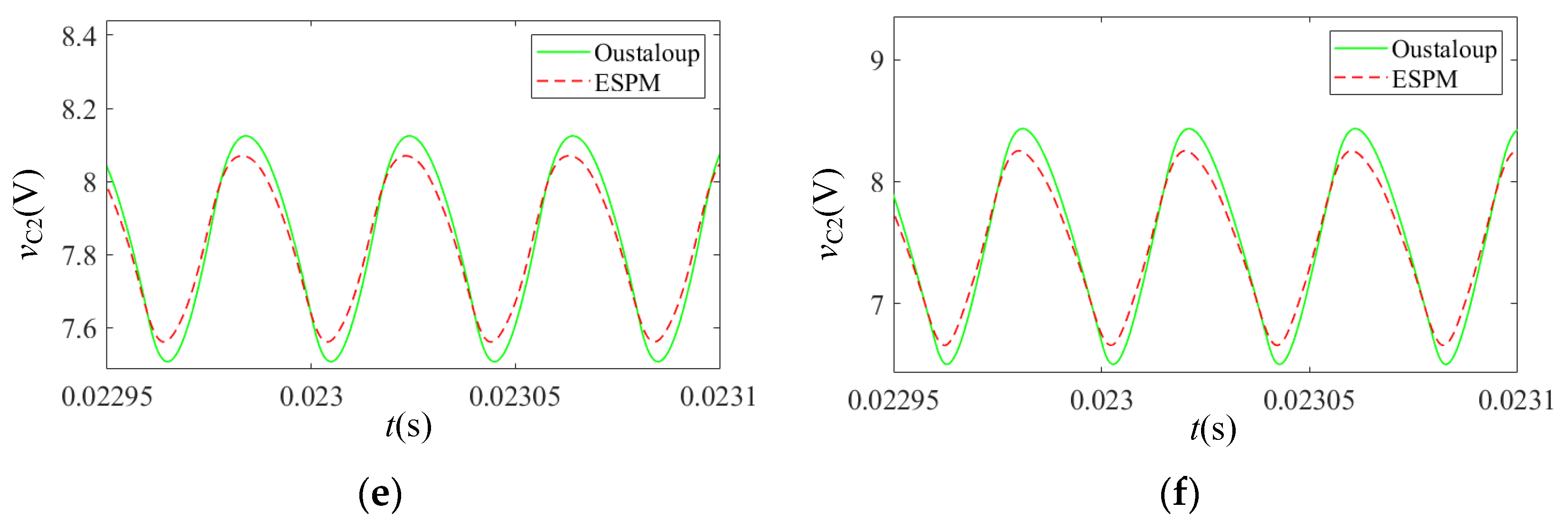
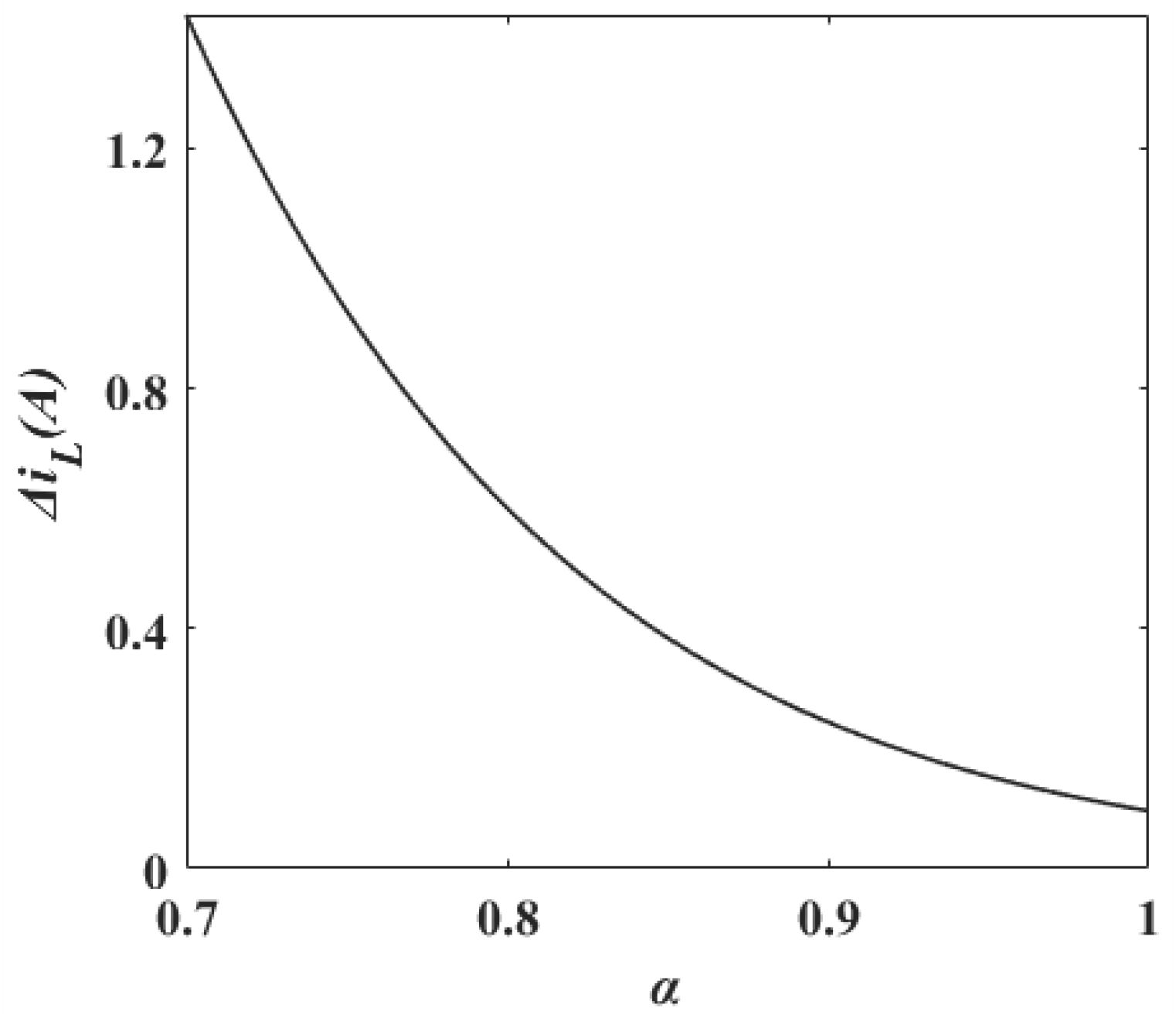
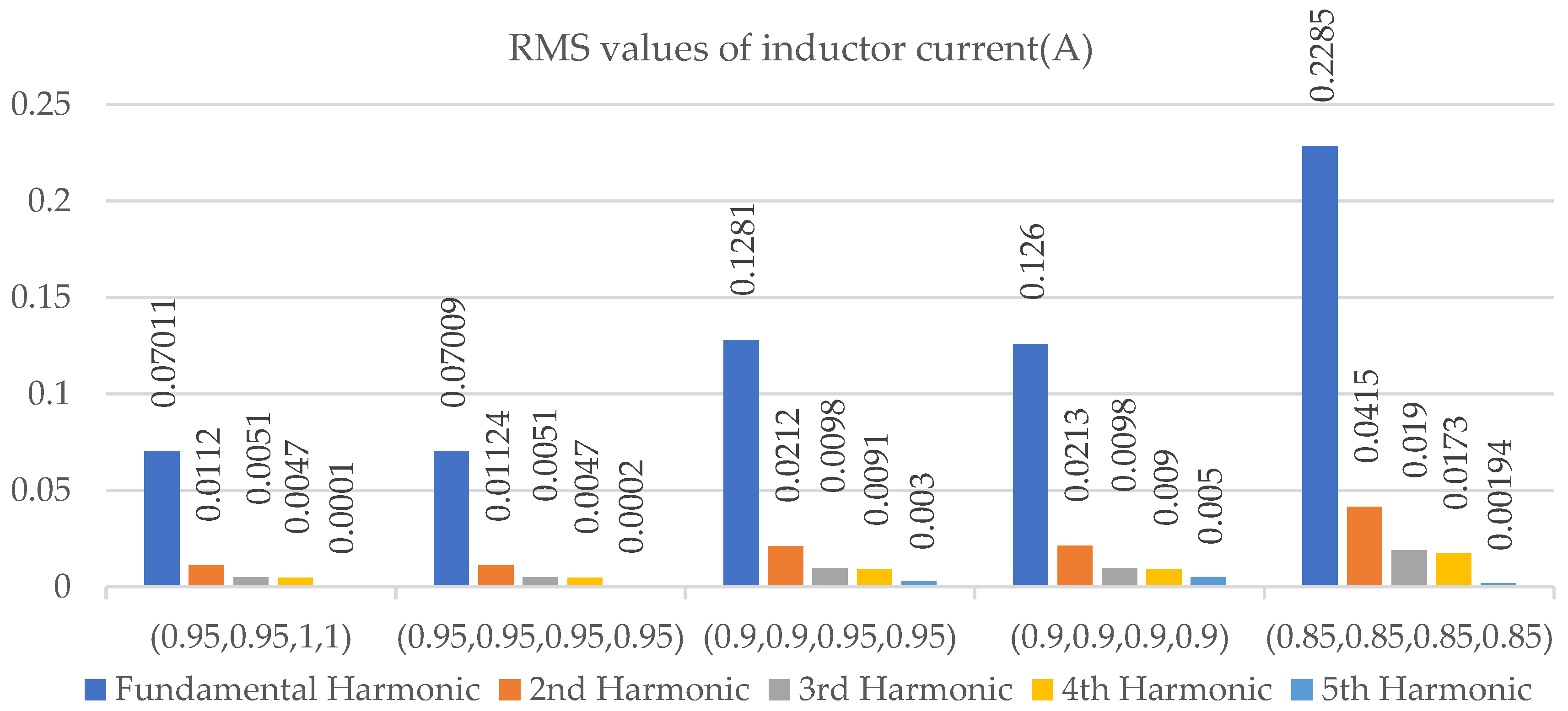
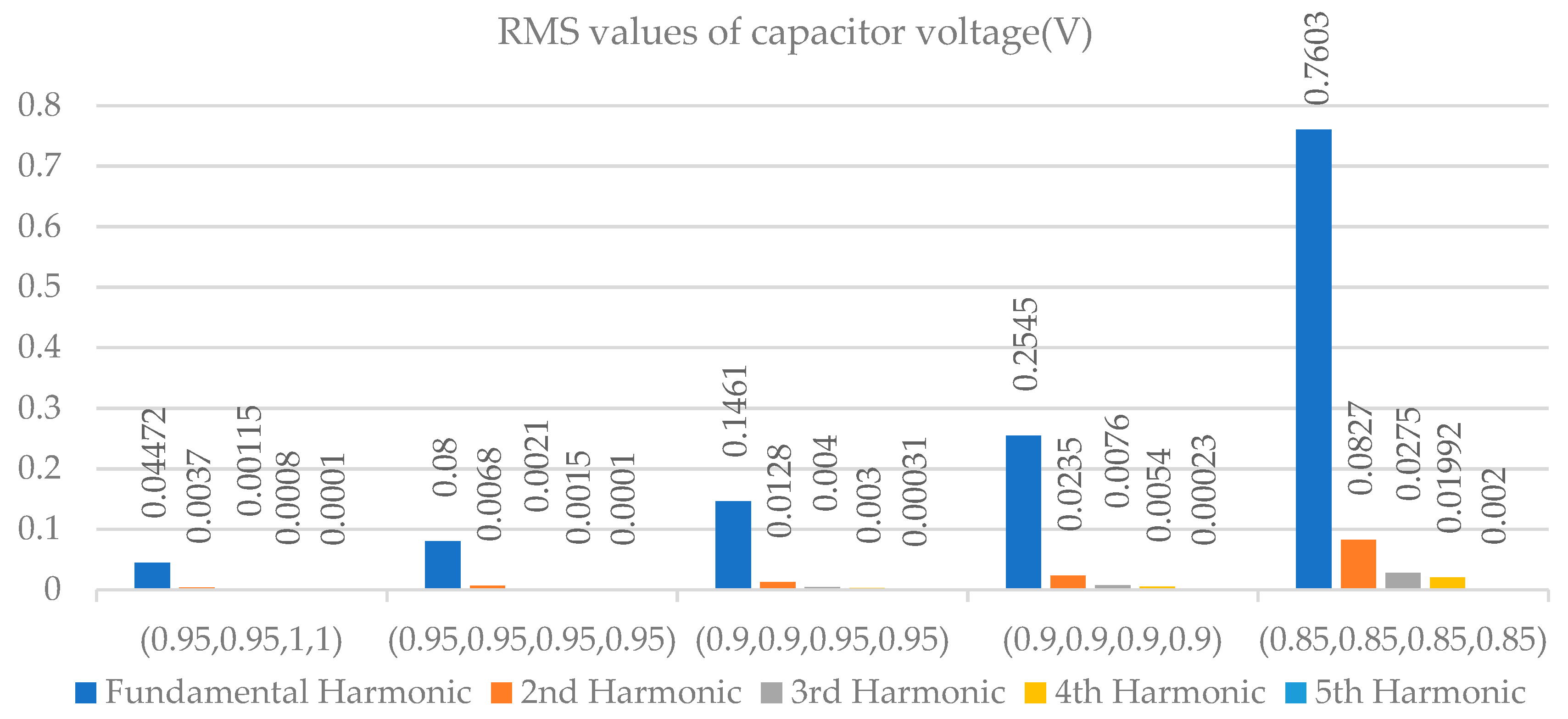
- The amplitude of each harmonic of the fractional converter is related to the order of the inductance and capacitance components. With all other parameters unchanged, when the fractional order of inductance and capacitance decreases, the amplitude of the harmonic components of each order in the state variable increases, increasing the amplitude of the inductor current and capacitance voltage ripple of the fractional order converter.
- (3)
- Compared with the numerical simulation method, the proposed method can better describe the change in the state variable ripple. The computational complexity is significantly reduced, the simulation speed is fast, and the memory consumption is small.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jonscher, A.K. Dielectric Relaxation in Solids, Chelsea; Dielectrics Pub.: London, UK, 1983. [Google Scholar]
- Westerlund, S. Causal Consulting: Dead Matter Has Memory; Casual Consulting: Kalmar, Sweden, 2002. [Google Scholar]
- Chen, X. Research on Analytical Modeling Methods and Nonlinear Dynamic Characteristics of Fractional-Order DC/DC Converters. Ph.D. Thesis, South China University of Technology, Guangzhou, China, 2018. [Google Scholar]
- Kianpoor, N.; Yousefi, M.; Bayati, N. Fractional Order Modelling of DC-DC Boost Converters. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019. [Google Scholar]
- Tan, C.; Liang, Z.S. Fractional order modeling and analysis of Boost converter in inductor current pseudo-continuous mode. Acta Phys. Sin. 2017, 63, 58–67. [Google Scholar]
- Yang, R.C.; Liao, X.Z. Modeling and analysis of fractional order Buck converter using Caputo–Fabrizio derivative. Energy Rep. 2020, 6, 440–445. [Google Scholar] [CrossRef]
- Wang, F.; Ma, X.K. Modeling and analysis of the fractional order buck converter in DCM operation by using fractional calculus and the circuit-Averaging Technique. J. Power Electron. 2013, 13, 1008–1015. [Google Scholar] [CrossRef]
- Wei, Z.H.; Zhang, B.; Jiang, Y.W. Analysis and Modeling of Fractional-Order Buck Converter Based on Riemann-Liouville Derivative. IEEE Access 2019, 7, 162768–162777. [Google Scholar] [CrossRef]
- Xie, L.L.; Liu, Z.P.; Zhang, B. A Modeling and Analysis Method for CCM Fractional Order Buck-Boost Converter by Using R–L Fractional Definition. J. Electr. Eng. Technol. 2020, 15, 1651–1661. [Google Scholar] [CrossRef]
- Xie, L.L.; Liu, Z.P.; Ning, K.Z. Fractional-Order Adaptive Sliding Mode Control for Fractional-Order Buck-Boost Converters. J. Electr. Eng. Technol. 2022, 17, 1693–1704. [Google Scholar] [CrossRef]
- Sarwar, S. On the Existence and Stability of Variable Order Caputo Type Fractional Differential Equations. Fractal Fract. 2022, 6, 51. [Google Scholar] [CrossRef]
- Wang, Z.Q.; Cao, J.Y. Numerical Solution of Fractional-Order Differential Integration Equations and Their Error Analysis; Xi’an Jiaotong University Press: Xi’an, China, 2015. [Google Scholar]
- Chen, X.; Chen, Y.F.; Zhang, B. A Modeling and Analysis Method for Fractional-Order DC-DC Converters. IEEE Trans. Power Electron. 2017, 32, 7034–7044. [Google Scholar] [CrossRef]
- Chen, Y.F.; Chen, X.; Hu, J. A symbolic analysis method for fractional-order boost converter in discontinuous conduction mode. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; IEEE: New York, NY, USA, 2017. [Google Scholar]
- Xu, J.; Li, X.; Liu, H. Fractional-Order Modeling and Analysis of a Three-Phase Voltage Source PWM Rectifier. IEEE Access 2020, 8, 13507–13515. [Google Scholar] [CrossRef]
- Sharma, M.; Rajpurohit, B.S.; Agnihotri, S.; Rathore, A.K. Development of Fractional Order Modeling of Voltage Source Converters. IEEE Access 2020, 8, 142652–142662. [Google Scholar] [CrossRef]
- Chen, B.; Li, C.; Wilson, B.; Huang, Y. Fractional modeling and analysis of coupled MR damping system. IEEE/CAA J. Autom. Sin. 2016, 3, 288–294. [Google Scholar]
- Chen, Y.F.; Xiao, W.X.; Zhang, B. Nonlinear Modeling and Harmonic Analysis of Magnetic Resonant WPT System Based on Equivalent Small Parameter Method. IEEE Trans. Ind. Electron. 2019, 66, 6604–6612. [Google Scholar] [CrossRef]
- Tseng, C.-C.; Lee, S.-L. Computation of fractional derivatives using Fourier transform and digital FIR differentiator. Signal Process. 2000, 80, 151–159. [Google Scholar] [CrossRef]
- Mohamed, A.; Rachid, M. Numerical Simulations of Fractional Systems: An Overview of Existing Methods and Improvements. Nonlinear Dyn. 2004, 38, 117–131. [Google Scholar]
- Xie, L.L.; Ning, K.Z.; Qin, L. Fractional Order Modeling and Simulation Analysis of Cuk Converter. Comput. Simul. 2022, 39, 313–320. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Vin | 12 V |
| R | 10 Ω |
| D | 0.4 |
| fs | 25,000 Hz |
| L1 | 2 mH |
| L2 | 2 mH |
| C1 | 10−5 F |
| C2 | 10−5 F |
| Order (α1, α2, β1, β2) | ESPM (a00 + a20) | Oustaloup’s Method |
|---|---|---|
| (0.85, 0.85, 0.85, 0.85) | (0.5574, 0.7515, −7.5145, 7.5145) | (0.6040, 0.7536, −7.5270, 7.530) |
| (0.9, 0.9, 0.9, 0.9) | (0.5417, 0.7836, −7.8359, 7.8359) | (0.5676, 0.7826, −7.8250, 7.8230) |
| (0.9, 0.9, 0.95, 0.95) | (0.5494, 0.7948, −7.9478, 7.9478) | (0.5813, 0.7954, −7.950, 7.950) |
| (0.95, 0.95, 0.95, 0.95) | (0.5354, 0.7955, −7.9546, 7.9546) | (0.5596, 0.7956, −7.9530, 7.9530) |
| (0.95, 0.95, 1, 1) | (0.5383, 0.7995, −7.9955, 7.9955) | (0.5625, 0.7998, −7.9940, 7.9950) |
| (1, 1, 1, 1) | (0.5330, 0.7998, −7.9975, 7.9975) | (0.5497, 0.8009, −7.990, 7.9970) |
| Order (α1, α2, β1, β2) | ΔiL | Theoretical Value | ESPM | Oustaloup |
|---|---|---|---|---|
| (1, 1, 1, 1) | ΔiL1/A | 0.096 | 0.087 | 0.09501 |
| ΔiL2/A | 0.096 | 0.0883 | 0.0949 | |
| (0.95, 0.95, 1, 1) | ΔiL1/A | 0.1702 | 0.1812 | 0.1858 |
| ΔiL2/A | 0.1702 | 0.1723 | 0.1851 | |
| (0.95, 0.95, 0.95, 0.95) | ΔiL1/A | 0.1702 | 0.1853 | 0.1874 |
| ΔiL2/A | 0.1702 | 0.1678 | 0.1839 | |
| (0.9, 0.9, 0.95, 0.95) | ΔiL1/A | 0.3012 | 0.313 | 0.3435 |
| ΔiL2/A | 0.3012 | 0.2968 | 0.3358 | |
| (0.9, 0.9, 0.9, 0.9) | ΔiL1/A | 0.3012 | 0.3132 | 0.3435 |
| ΔiL2/A | 0.3012 | 0.2918 | 0.3201 | |
| (0.85, 0.85, 0.85, 0.85) | ΔiL1/A | 0.532 | 0.5716 | 0.5825 |
| ΔiL2/A | 0.532 | 0.5246 | 0.5637 |
| Order (α1, α2, β1, β2) | ΔiL | ESPM | Oustaloup |
|---|---|---|---|
| (1, 1, 1, 1) | ΔiL1/A | 9.37% | 1.03% |
| ΔiL2/A | 8.02% | 1.14% | |
| (0.95, 0.95, 1, 1) | ΔiL1/A | 6.46% | 9.16% |
| ΔiL2/A | 1.23% | 8.75% | |
| (0.95, 0.95, 0.95, 0.95) | ΔiL1/A | 8.87% | 10.1% |
| ΔiL2/A | 1.41% | 8.05% | |
| (0.9, 0.9, 0.95, 0.95) | ΔiL1/A | 3.91% | 14.04% |
| ΔiL2/A | 1.46% | 11.48% | |
| (0.9, 0.9, 0.9, 0.9) | ΔiL1/A | 3.98% | 14.04% |
| ΔiL2/A | 3.12% | 6.27% | |
| (0.85, 0.85, 0.85, 0.85) | ΔiL1/A | 7.44% | 9.49% |
| ΔiL2/A | 1.39% | 5.95% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, L.; Wan, D. Modeling and Harmonic Analysis of a Fractional-Order Zeta Converter. Energies 2023, 16, 3969. https://doi.org/10.3390/en16093969
Xie L, Wan D. Modeling and Harmonic Analysis of a Fractional-Order Zeta Converter. Energies. 2023; 16(9):3969. https://doi.org/10.3390/en16093969
Chicago/Turabian StyleXie, Lingling, and Di Wan. 2023. "Modeling and Harmonic Analysis of a Fractional-Order Zeta Converter" Energies 16, no. 9: 3969. https://doi.org/10.3390/en16093969
APA StyleXie, L., & Wan, D. (2023). Modeling and Harmonic Analysis of a Fractional-Order Zeta Converter. Energies, 16(9), 3969. https://doi.org/10.3390/en16093969