
Optimal Control of Cascade Hydro Plants as a Prosumer-Oriented Distributed Energy Depot



Abstract
:1. Introduction

1.1. Problem Context
1.2. Literature Review
1.3. Contribution
1.4. Work Organization
2. Materials and Methods
2.1. Modelling Strategy
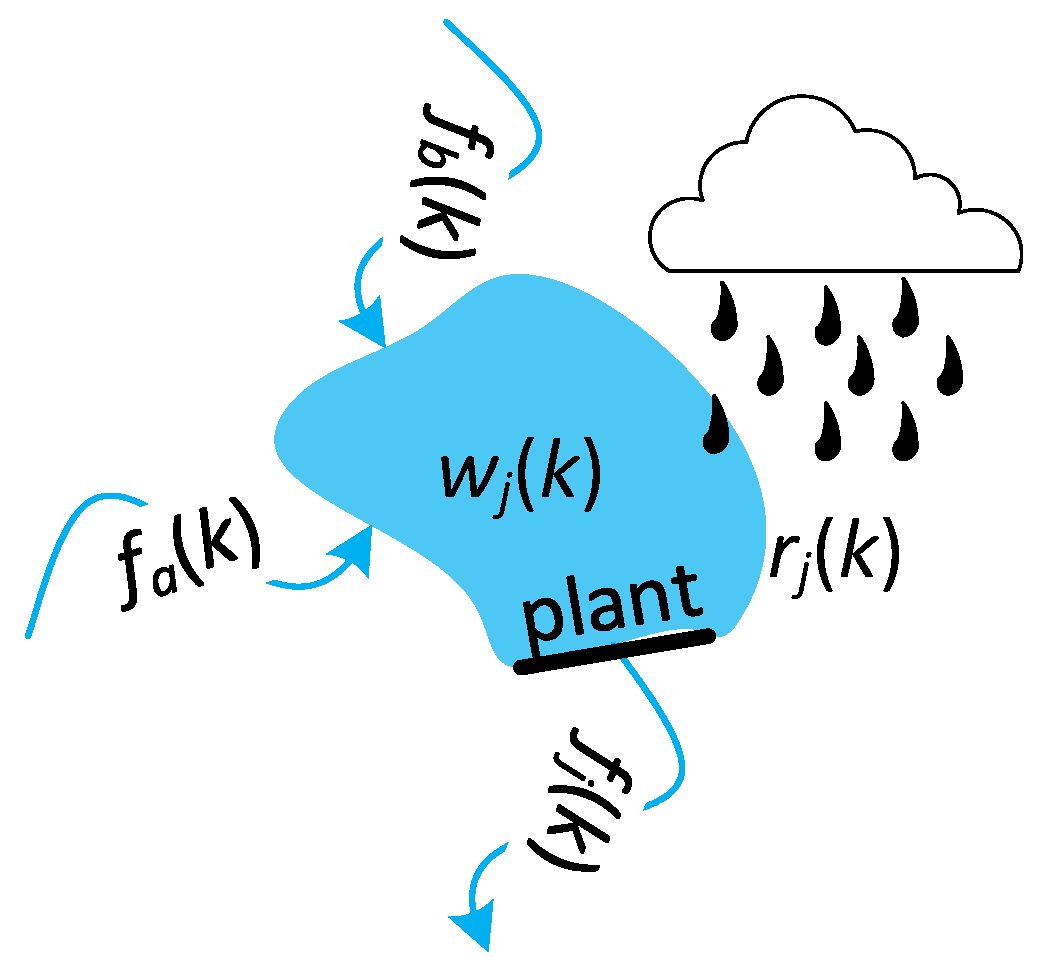
2.2. Plant-Reservoir Dynamics
- wj(k) is the water volume (equivalently the water level) in the reservoir,
- fj(k) is the amount of water used to drive the plant power generators between time instants k and k + 1,
- rj(k) is the supply from external hydrological sources like rain (and its runoff), melting snow, tributaries, vaporization, etc. The values of rj can be obtained from the weather forecast and hydrological models within the planning horizon of m periods, and rj(k) is assumed known, albeit time-varying. It may be positive, e.g., rain, or negative, e.g., vaporization, or soakage.
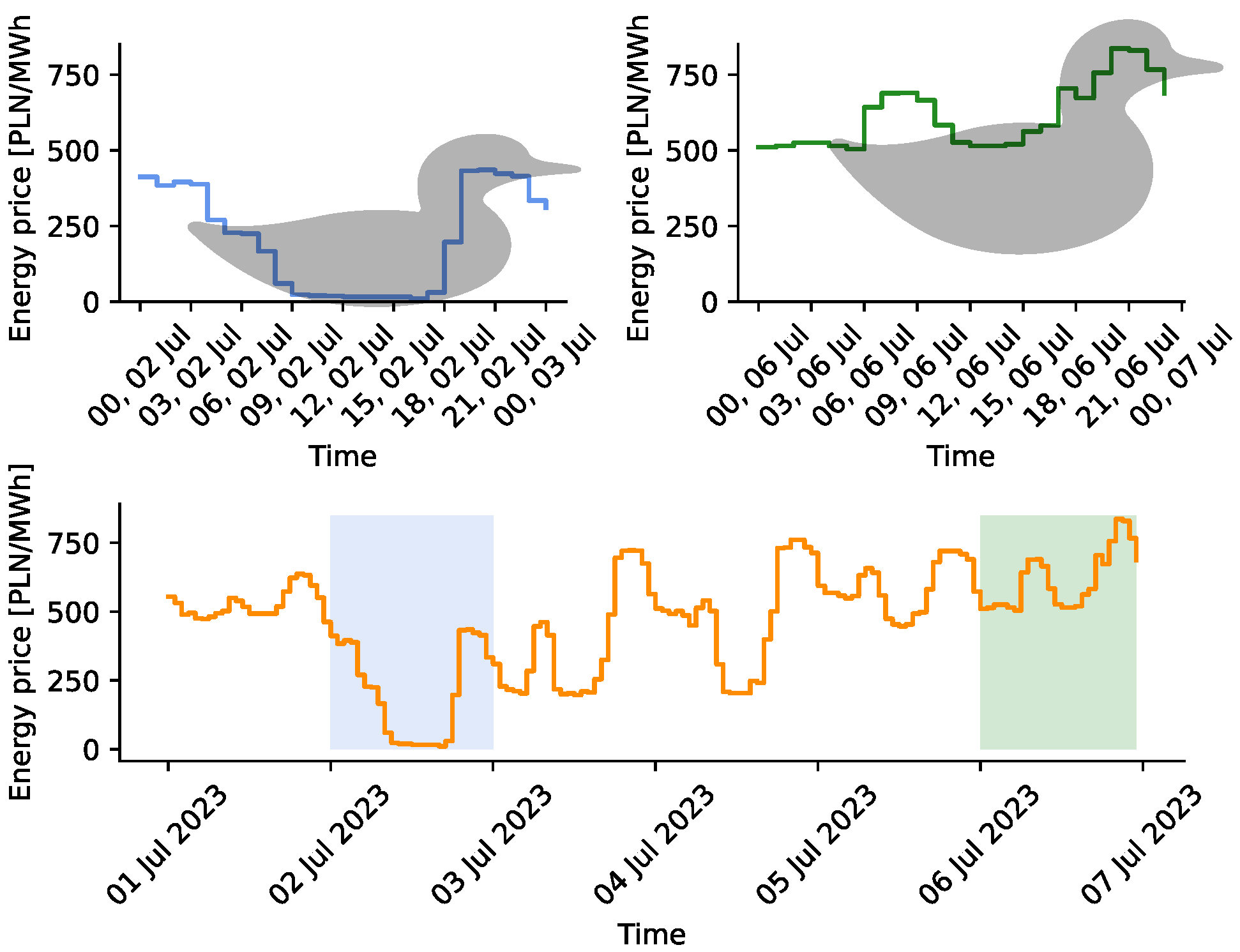
- p(k) is the energy price at instant k, reflecting the duck curve, possibly moderated according to the specific local demands or tariffs;
- ηj is the efficiency of power generators, including the impact of the dam height. For prosumer generators in the lowlands, the flow of 1 m3/s corresponds to the power generation of 5–7 kW per unit of the dam height.
2.3. Cascade Multi-Plant System
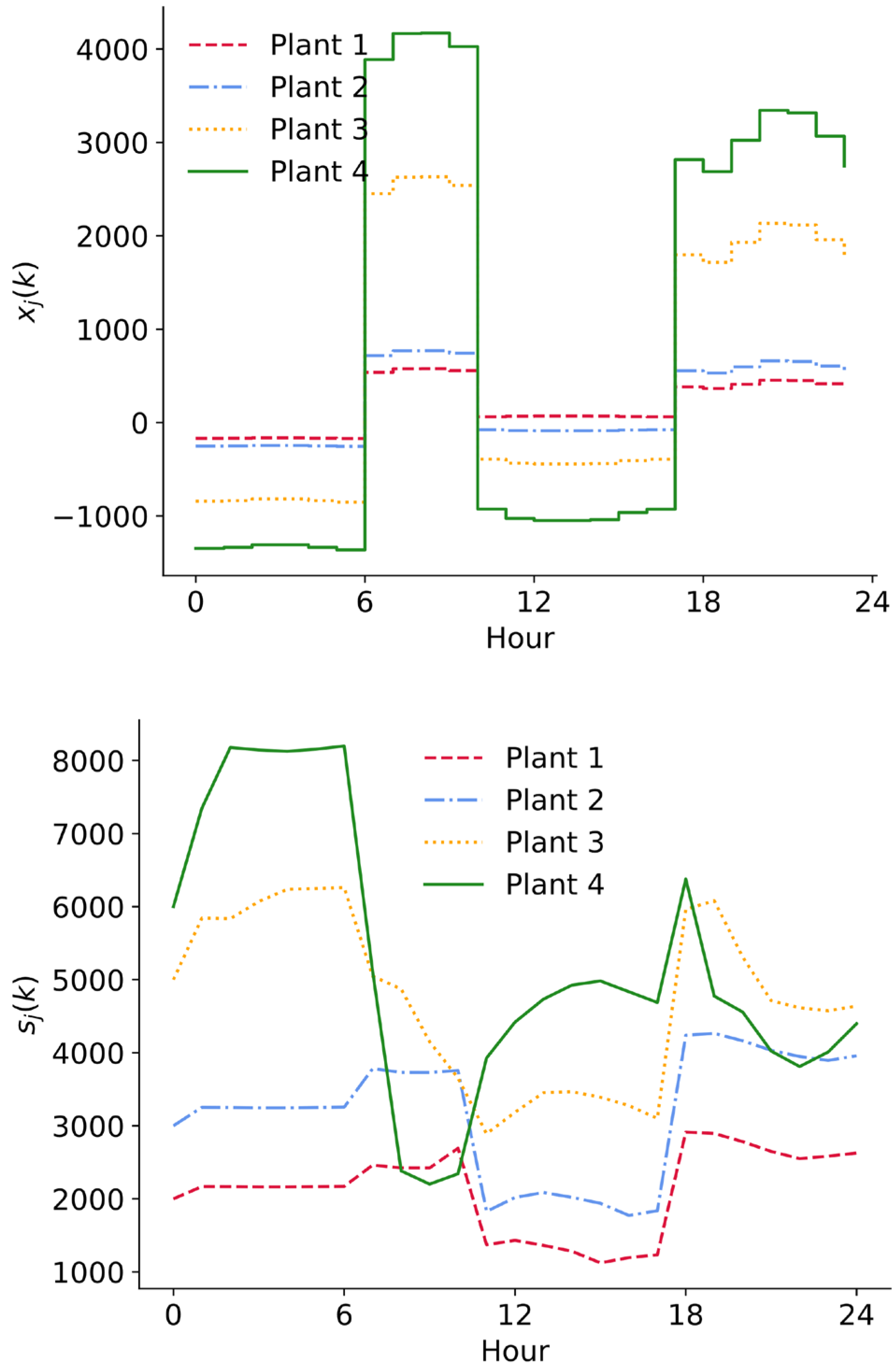
- x(k) = [x1(k) x2(k) … xn(k)]’ be the vector of controlled flows: x(k) = f(k) − fref, where fref is the vector of natural flows;
- s(k) = [s1(k) s2(k) … sn(k)]’ be the vector of water volume in reservoirs 1…n corresponding to controlled flows x1…xn;
- r(k) = [r1(k) r2(k) … rn(k)]’ be the water volume from exogenous sources.
3. Results
3.1. Problem Formulation
3.2. Preliminaries
3.3. Solution
- state equation
- costate equation
- stationarity condition
4. Discussion
4.1. System Properties
- P1:
- The current flow value depends on the current price, yet not on the water level. Thus, the prone-to-error water level measurements are not needed for the control law implementation.
- P2:
- Since −Θ is a positive matrix and the price is also positive, the flow control signal does not change the sign in the entire planning horizon. It either reduces the water inflow in the case of heavy rainfall and a risk of flood, or magnifies the flow intensity for the prosumers to gain more profit.
- P3:
- The flow intensity does not depend on the temporary rainfall intensity, but on its cumulative value , which implies a certain degree of robustness to weather-condition fluctuations. The control system is resistant to temporary changes of opposite polarity.
- P4:
- Withsubstituting (39) for x(k) in (3), one obtains
- P5:
- The water level exhibits neither oscillations nor overshoots. It is confined to the interval determined by the initial s(0) and terminal value s(m).
4.2. Practical Considerations
- Within the planning horizon, identify zones of ‘accumulation’ (when the energy price is below the average) and ‘earning’ (when the energy price is above the average), as illustrated in Figure 2.
- For each zone, calculate x(k) according to the closed-form expression (39), which is computationally not involving.
- Use the solution obtained in Step 2 as an initial value (the initial guess) for the numerical algorithm to determine the optimal sequence in the presence of hard constraints (43).
4.3. Numerical Example
- the initial water level in the reservoirs: s(0) = [2, 3, 5, 6]′ × 103 [m3],
- the desired final water level: either s(m) = [1, 1.5, 2.5, 3]′ × 103 [m3], or s(m) = [3, 4.5, 7.5, 9]′ × 103 [m3], depending on the accumulation/earning period (Figure 2),
- the natural flow fref = [1, 1.5, 2.5, 3]′ × 103 [m3/h].
5. Conclusions
- a steady power plant load, which increases the plant efficiency and decreases the costs of keeping the power reserve necessary to maintain the energy grid stability [33];
- an increased RSE-generation ratio, hence savings on fossil fuels;
- decreased costs of energy infrastructure by reducing the upper-bound parameters of cables, transformers, etc.;
- no requirement for environmental-cost compensations (the constructions are poorly visible);
- undemanding deployment—the solution requires neither costly computational resources (vital for pico HP owners), nor elevated communication expectancies (important in rural areas).
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kolosok, S.; Bilan; Vasylieva, T.; Wojciechowski, A.; Morawski, M. A scoping review of renewable energy, sustainability and the environment. Energies 2021, 14, 4490. [Google Scholar] [CrossRef]
- Qu, M.; Ding, T.; Jia, W.; Zhu, S.; Yang, Y.; Blaabjerg, F. Distributed optimal control of energy hubs for micro-integrated energy systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2145–2158. [Google Scholar] [CrossRef]
- Rahman, M.M.; Oni, A.O.; Gemechu, E.; Kumar, A. Assessment of energy storage technologies: A review. Energy Convers. Manag. 2020, 223, 113295. [Google Scholar]
- PSE. Market Energy Prices. Available online: https://www.pse.pl/dane-systemowe/funkcjonowanie-rb/raporty-dobowe-z-funkcjonowania-rb/podstawowe-wskazniki-cenowe-i-kosztowe/rynkowa-cena-energii-elektrycznej-rce (accessed on 28 August 2023).
- Thaeer Hammid, A.; Awad, O.I.; Sulaiman, M.H.; Gunasekaran, S.S.; Mostafa, S.A.; Manoj Kumar, N.; Khalaf, B.A.; Al-Jawhar, Y.A.; Abdulhasan, R.A. A review of optimization algorithms in solving hydro generation scheduling problems. Energies 2020, 13, 2787. [Google Scholar]
- Singh, V.K.; Singal, S.K. Operation of hydro power plants—A review. Renew. Sustain. Energy Rev. 2017, 69, 610–619. [Google Scholar] [CrossRef]
- Teo, T.T.; Logenthiran, T.; Woo, W.L.; Abidi, K. Intelligent controller for energy storage system in grid-connected microgrid. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 650–658. [Google Scholar] [CrossRef]
- Wirfs-Brock, J. IE Questions: Why Is California Trying to Behead the Duck? 2014. Available online: https://insideenergy.org/2014/10/02/ie-questions-why-is-california-trying-to-behead-the-duck/ (accessed on 22 July 2023).
- Anderson, D.; Moggridge, H.; Warren, P.; Shucksmith, J. The impacts of ‘run-of-river’ hydropower on the physical and ecological condition of rivers. Water Environ. J. 2015, 29, 268–276. [Google Scholar] [CrossRef]
- Anaza, S.O.; Abdulazeez, M.; Yisah, Y.A.; Yusuf, Y.; Salawu, B.U.; Momoh, S. Micro hydro-electric energy generation—An overview. Am. J. Eng. Res. 2017, 6, 5–12. [Google Scholar]
- Sachdev, H.; Akella, A.K.; Kumar, N. Analysis and evaluation of small hydropower plants: A bibliographical survey. Renew. Sustain. Energy Rev. 2015, 51, 1013–1022. [Google Scholar] [CrossRef]
- Qiu, Y.; Lin, J.; Liu, F.; Dai, N.; Song, Y.; Chen, G.; Ding, L. Tertiary regulation of cascaded run-of-the-river hydropower in the islanded renewable power system considering multi-timescale dynamics. IET Power Gen. 2021, 15, 1778–1795. [Google Scholar]
- Jamali, S.; Jamali, B. Cascade hydropower systems optimal operation: Implications for Iran’s Great Karun hydropower systems. Appl. Water Sci. 2019, 9, 66. [Google Scholar]
- Wyszkowski, K.; Piwowarek, Z.; Pałejko, Z. Małe elektrowne wodne w Polsce; Technical Report; UN Global: Warsaw, Poland, 2022; Available online: https://ungc.org.pl/wp-content/uploads/2022/03/Raport_Male_elektrownie_wodne_w_Polsce.pdf (accessed on 28 August 2023). (In Polish)
- Khomsah, A.; Sudjito; Wijono; Laksono, A.S. Pico-hydro as A Renewable Energy: Local Natural Resources and Equipment Availability in Efforts to Generate Electricity. IOP Conf. Ser. Mater. Sci. Eng. 2018, 462, 012047. [Google Scholar] [CrossRef]
- IEA Hydropower. Management Models for Hydropower Cascade Reservoirs, Compilation of Cases; Tech Report; International Energy Agency Technology Collaboration Programme on Hydropower. 2021. Available online: https://www.ieahydro.org/media/02e6ec8e/EAHydro_AnnexXIV_Management%20Models%20for%20Hydropower%20Cascade%20Reservoirs_CASE%20COMPILATION.pdf (accessed on 28 August 2023).
- Borkowski, D.; Cholewa, D.; Korzeń, A. A run-of-the-river Hydro-PV battery hybrid system as an energy supplier for local loads. Energies 2021, 14, 5160. [Google Scholar] [CrossRef]
- Yu, Y.; Wu, Y.; Sheng, Q. Optimal scheduling strategy of cascade hydropower plants under the joint market of day-ahead energy and frequency regulation. IEEE Access 2021, 9, 87749–87762. [Google Scholar]
- Zhang, H.; Chang, J.; Gao, C.; Wu, H.; Wang, Y.; Lei, K.; Long, R.; Zhang, L. Cascade hydropower plants operation considering comprehensive ecological water demands. Energy Convers. Manag. 2019, 180, 119–133. [Google Scholar] [CrossRef]
- Ignaciuk, P.; Morawski, M. Price-shaped optimal water reflow in prosumer energy cascade hydro plants. In Proceedings of the 18th Conference on Computer Science and Intelligence Systems, Warsaw, Poland, 17–20 September 2023; pp. 1001–1005. [Google Scholar]
- Linke, H. A model-predictive controller for optimal hydro-power utilization of river reservoirs. In Proceedings of the 2010 IEEE International Conference on Control Applications, Yokohama, Japan, 8–10 September 2010; pp. 1868–1873. [Google Scholar]
- Alvarez, G. An optimization model for operations of large scale hydro power plants. IEEE Lat. Am. Trans. 2020, 18, 1631–1638. [Google Scholar]
- Danielson, C.; Borrellia, F.; Oliver, D.; Anderson, D.; Phillips, T. Constrained flow control in storage networks: Capacity maximization and balancing. Automatica 2013, 49, 2612–2621. [Google Scholar] [CrossRef]
- Basin, M.V.; Guerra-Avellaneda, F.; Shtessel, Y.B. Stock management problem: Adaptive fixed-time convergent continuous controller design. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 4974–4983. [Google Scholar] [CrossRef]
- Ignaciuk, P. Discrete-time control of production-inventory systems with deteriorating stock and unreliable supplies. IEEE Trans. Syst. Man Cybern. Syst. 2015, 45, 338–348. [Google Scholar] [CrossRef]
- Ignaciuk, P. Dead-time compensation in continuous-review perishable inventory systems with multiple supply alternatives. J. Process Control 2012, 22, 915–924. [Google Scholar] [CrossRef]
- Shaw, A.R.; Smith Sawyer, H.; LeBoeuf, E.J.; McDonald, M.P.; Hadjerioua, B. Hydropower optimization using artificial neural network surrogate models of a high-fidelity hydrodynamics and water quality model. Water Resour. Res. 2017, 53, 9444–9461. [Google Scholar]
- Ahmadianfar, I.; Samadi-Koucheksaraee, A.; Asadzadeh, M. Extract nonlinear operating rules of multi-reservoir systems using an efficient optimization method. Sci. Rep. 2022, 12, 18880. [Google Scholar] [CrossRef] [PubMed]
- Bernardes, J., Jr.; Santos, M.; Abreu, T.; Prado, L., Jr.; Miranda, D.; Julio, R.; Viana, P.; Fonseca, M.; Bortoni, E.; Bastos, G.S. Hydropower operation optimization using machine learning: A systematic review. AI 2022, 3, 78–99. [Google Scholar]
- Wieczorek, Ł.; Ignaciuk, P. (r, Q) inventory management in complex distribution systems of the One Belt One Road initiative. Int. J. Shipp. Transp. Logist. 2022, 15, 111–143. [Google Scholar]
- Marcelino, C.G.; Leite, G.M.C.; Delgado, C.A.D.M.; de Oliveira, L.B.; Wanner, E.F.; Jiménez-Fernández, S.; Salcedo-Sanz, S. An efficient multi-objective evolutionary approach for solving the operation of multi-reservoir system scheduling in hydro-power plants. Expert Syst. Appl. 2021, 185, 115638. [Google Scholar] [CrossRef]
- Morawski, M.; Ignaciuk, P. Balancing energy budget in prosumer water plant installations with explicit consideration of flow delay. IFAC-PapersOnLine 2023, 56, 11748–11753. [Google Scholar] [CrossRef]
- Mielczarski, W. Energy Systems & Markets; Association of Polish Electrical Engineers: Lodz, Poland, 2018. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plant | 6 July | 2 July |
|---|---|---|
| Plant 1 | 22.93% | 26.75% |
| Plant 2 | 18.24% | 26.80% |
| Plant 3 | 34.60% | 52.92% |
| Plant 4 | 36.35% | 60.40% |
| All plants | 31.07% | 48.31% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ignaciuk, P.; Morawski, M. Optimal Control of Cascade Hydro Plants as a Prosumer-Oriented Distributed Energy Depot. Energies 2024, 17, 469. https://doi.org/10.3390/en17020469
Ignaciuk P, Morawski M. Optimal Control of Cascade Hydro Plants as a Prosumer-Oriented Distributed Energy Depot. Energies. 2024; 17(2):469. https://doi.org/10.3390/en17020469
Chicago/Turabian StyleIgnaciuk, Przemysław, and Michał Morawski. 2024. "Optimal Control of Cascade Hydro Plants as a Prosumer-Oriented Distributed Energy Depot" Energies 17, no. 2: 469. https://doi.org/10.3390/en17020469
APA StyleIgnaciuk, P., & Morawski, M. (2024). Optimal Control of Cascade Hydro Plants as a Prosumer-Oriented Distributed Energy Depot. Energies, 17(2), 469. https://doi.org/10.3390/en17020469