

Optimal Design for New Rotary Engine with Geometric Shape Functions on Combustion Chamber and Ports

Abstract
:1. Introduction
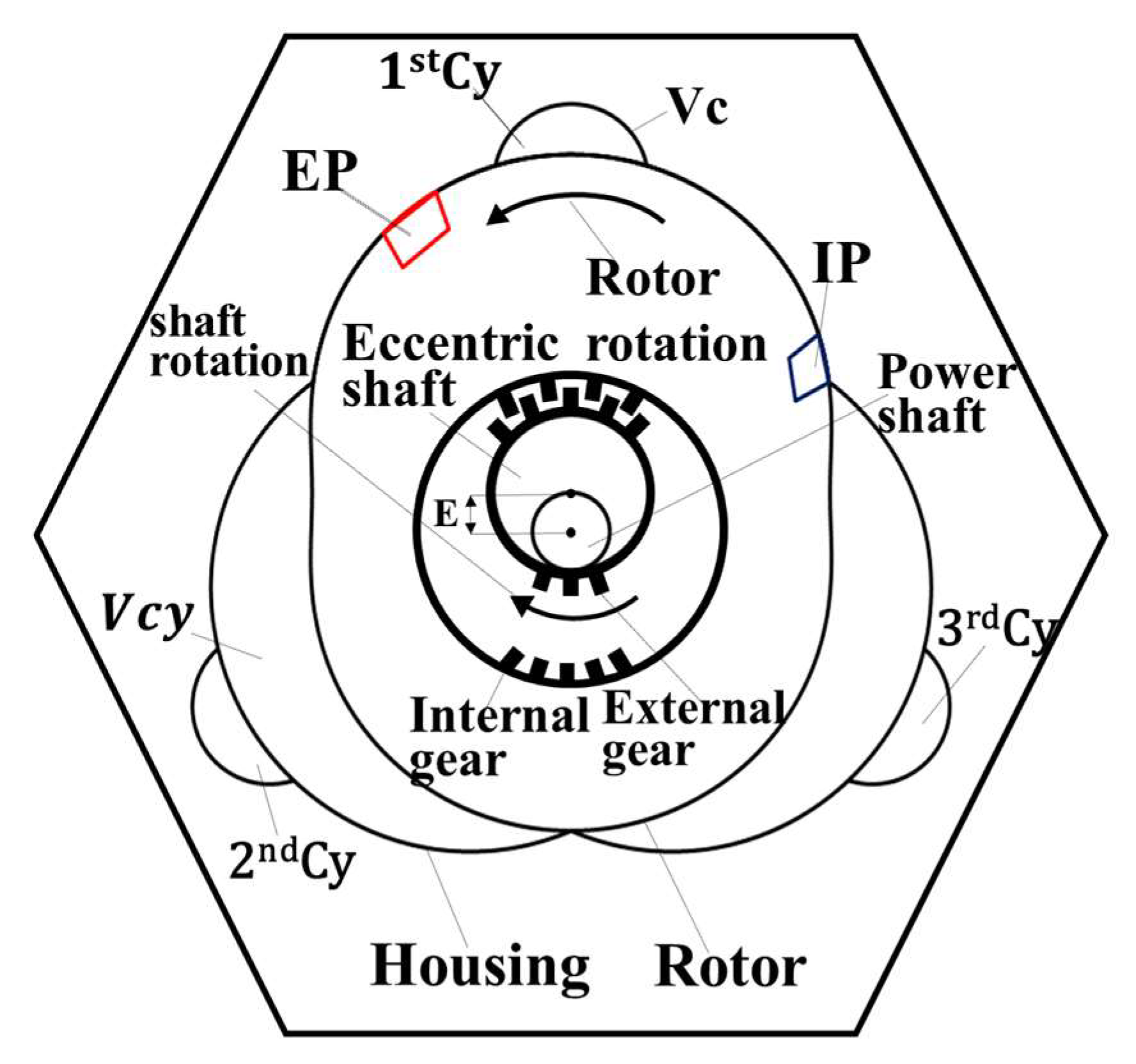
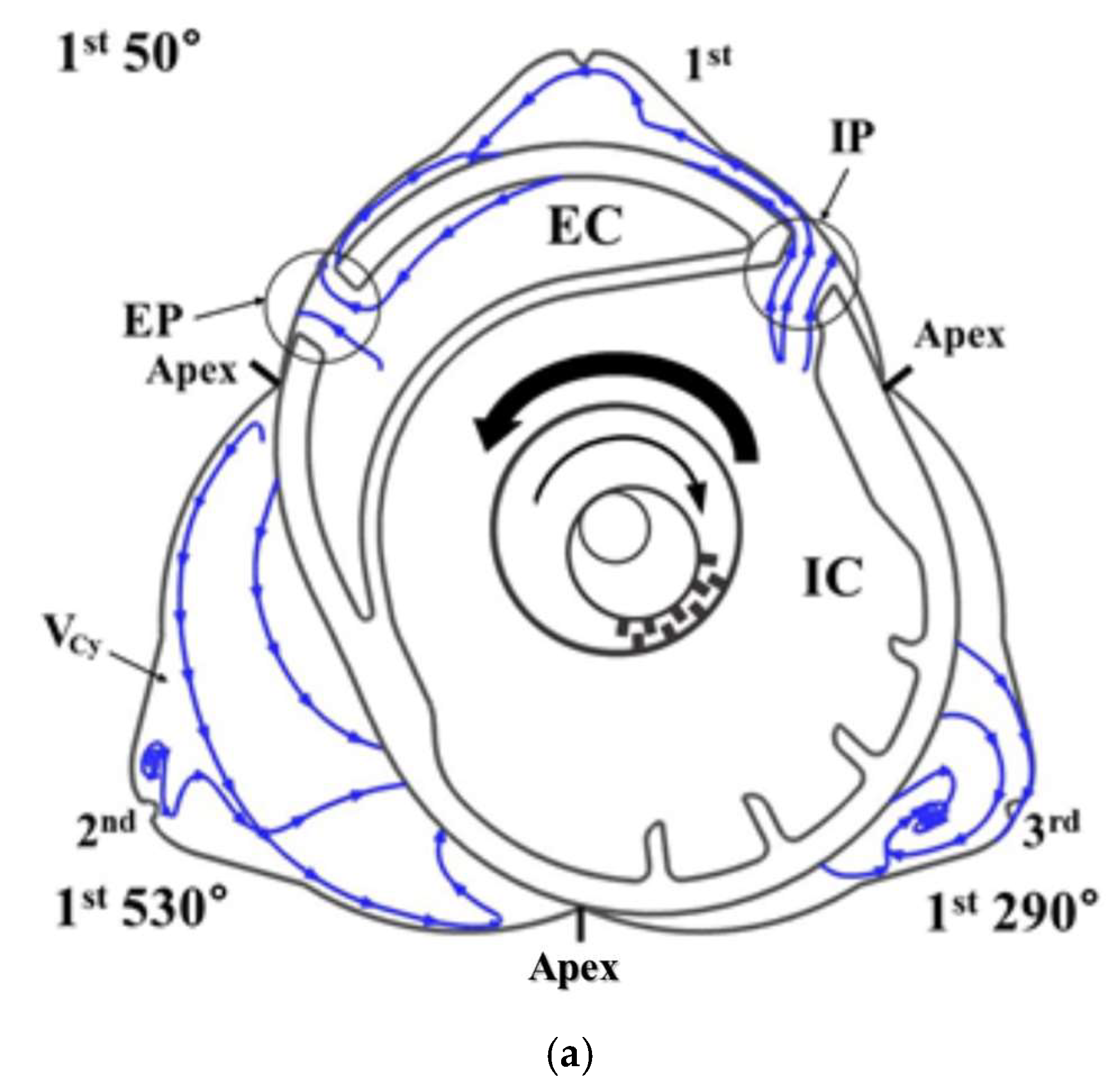
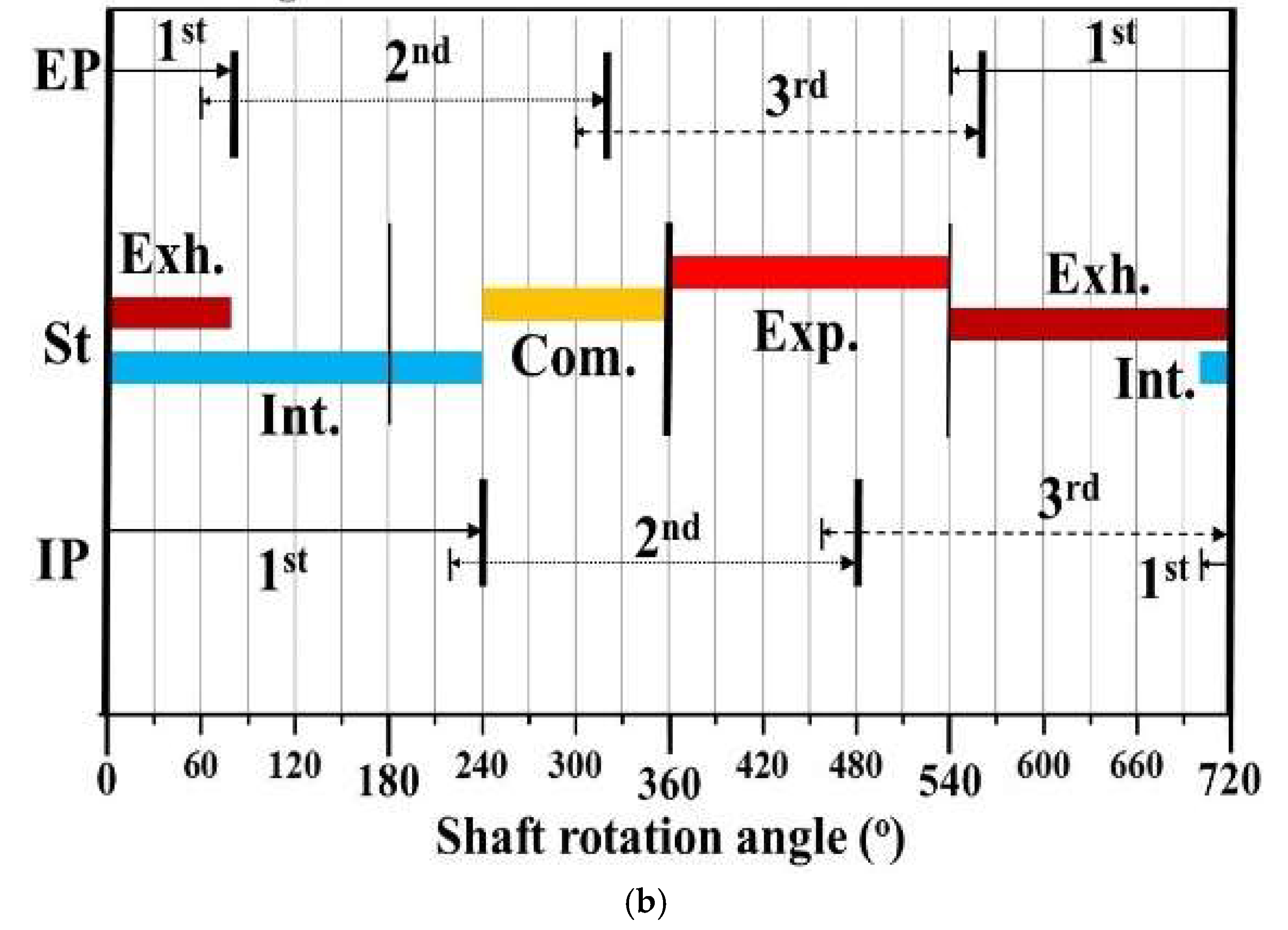
2. GP3 Engine Structure and Operation
3. Design Parameters and Specifications for the Proposed Rotary Engines
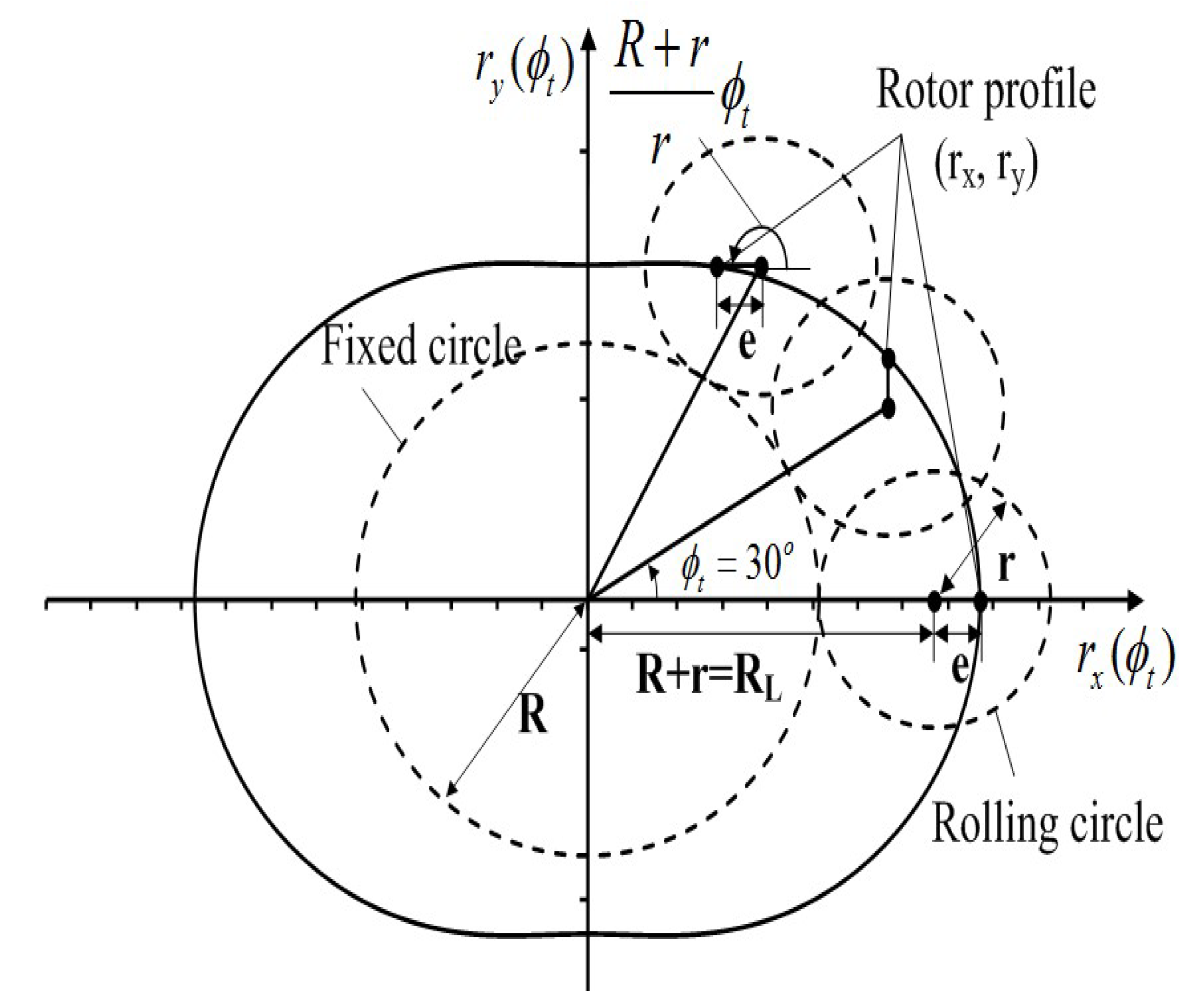
3.1. Rotor and Housing Design Parameters
3.2. Optimal Relationship between Combustion Chamber Volume and Surface Area
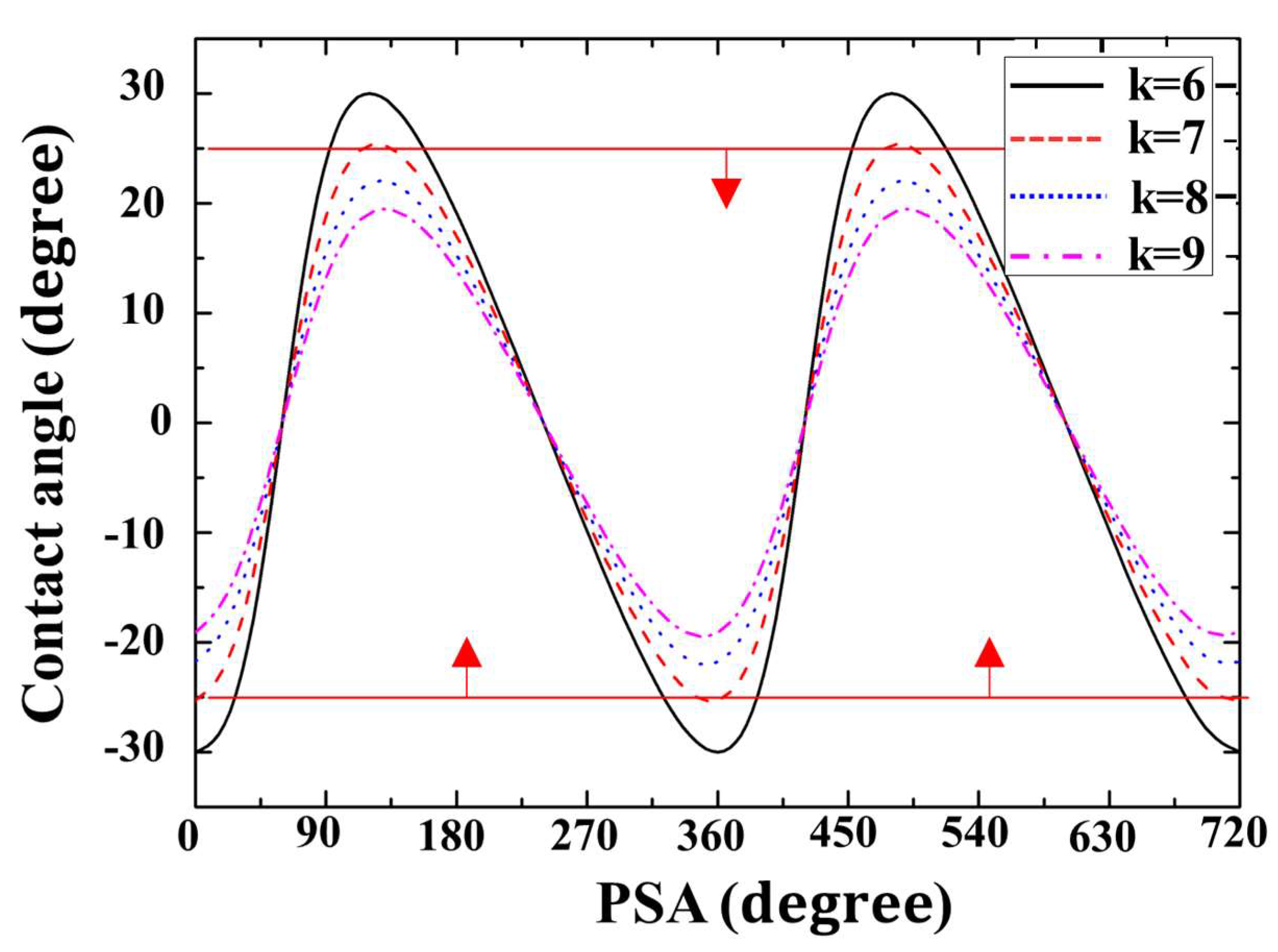
3.3. Contact Angle
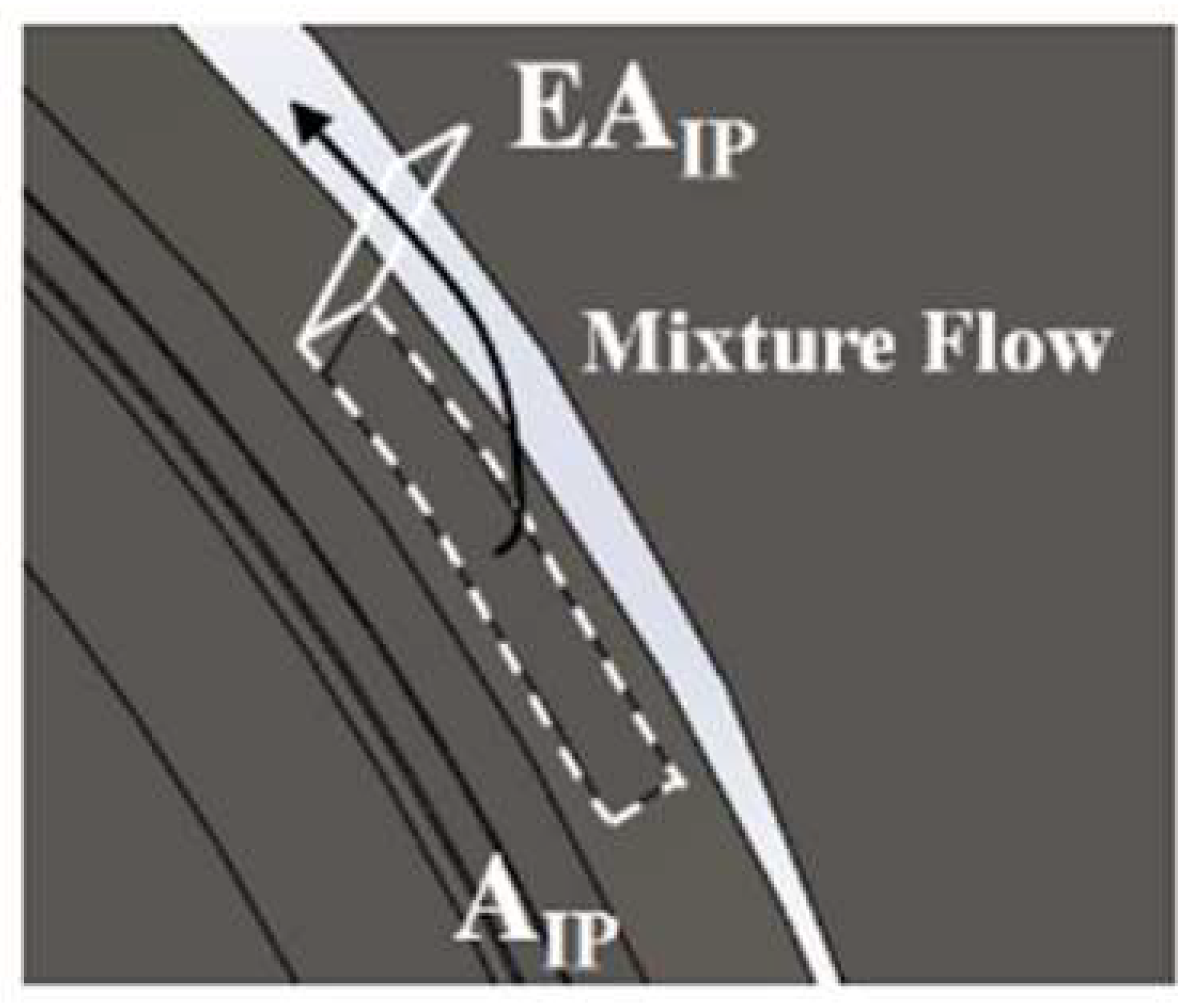
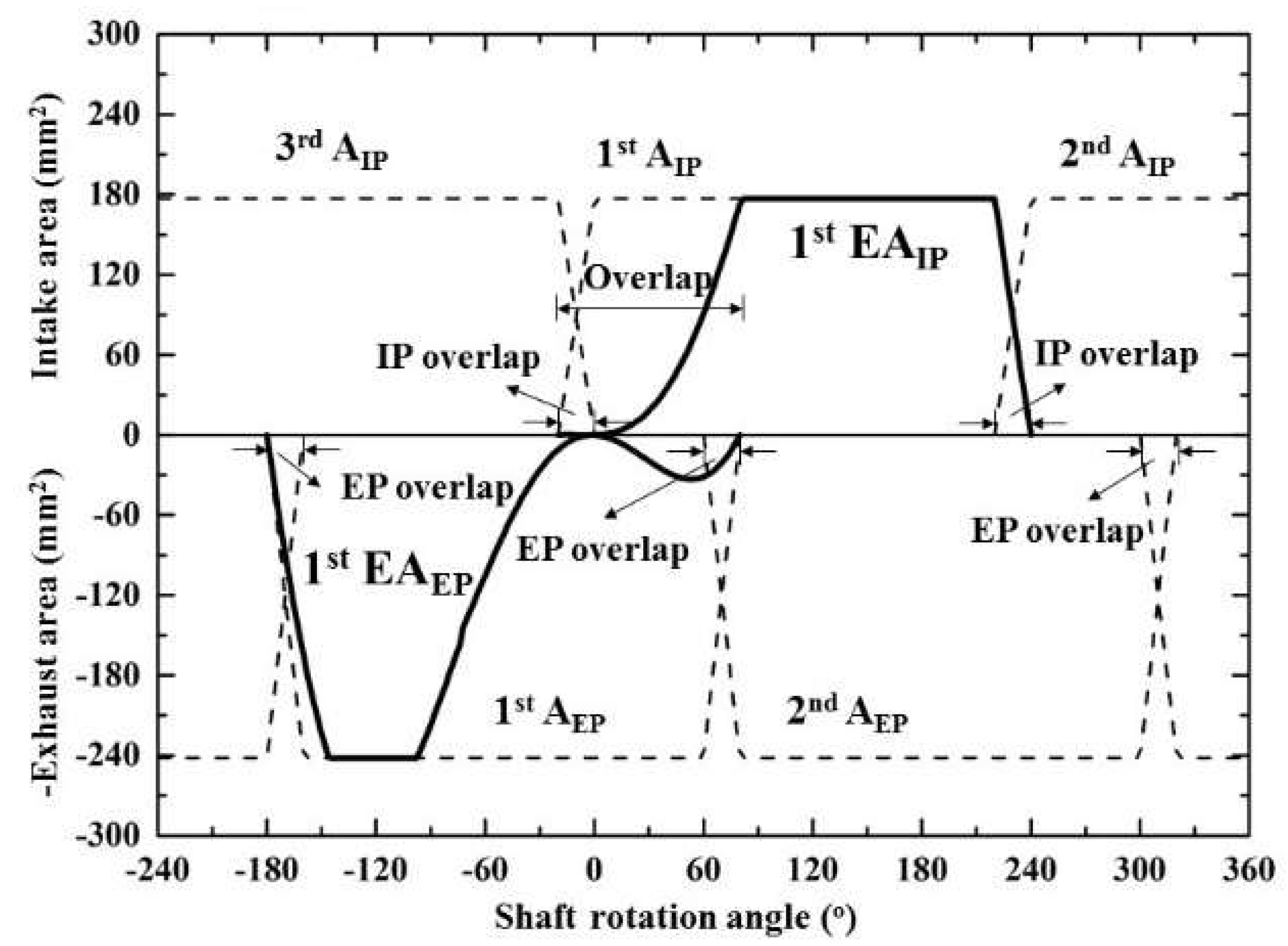
3.4. Port Effective Area and Change
4. Results and Discussion
4.1. Optimal Geometry Design for a Small GP3 Engine
4.2. Prototype Motoring Performance
5. Conclusions
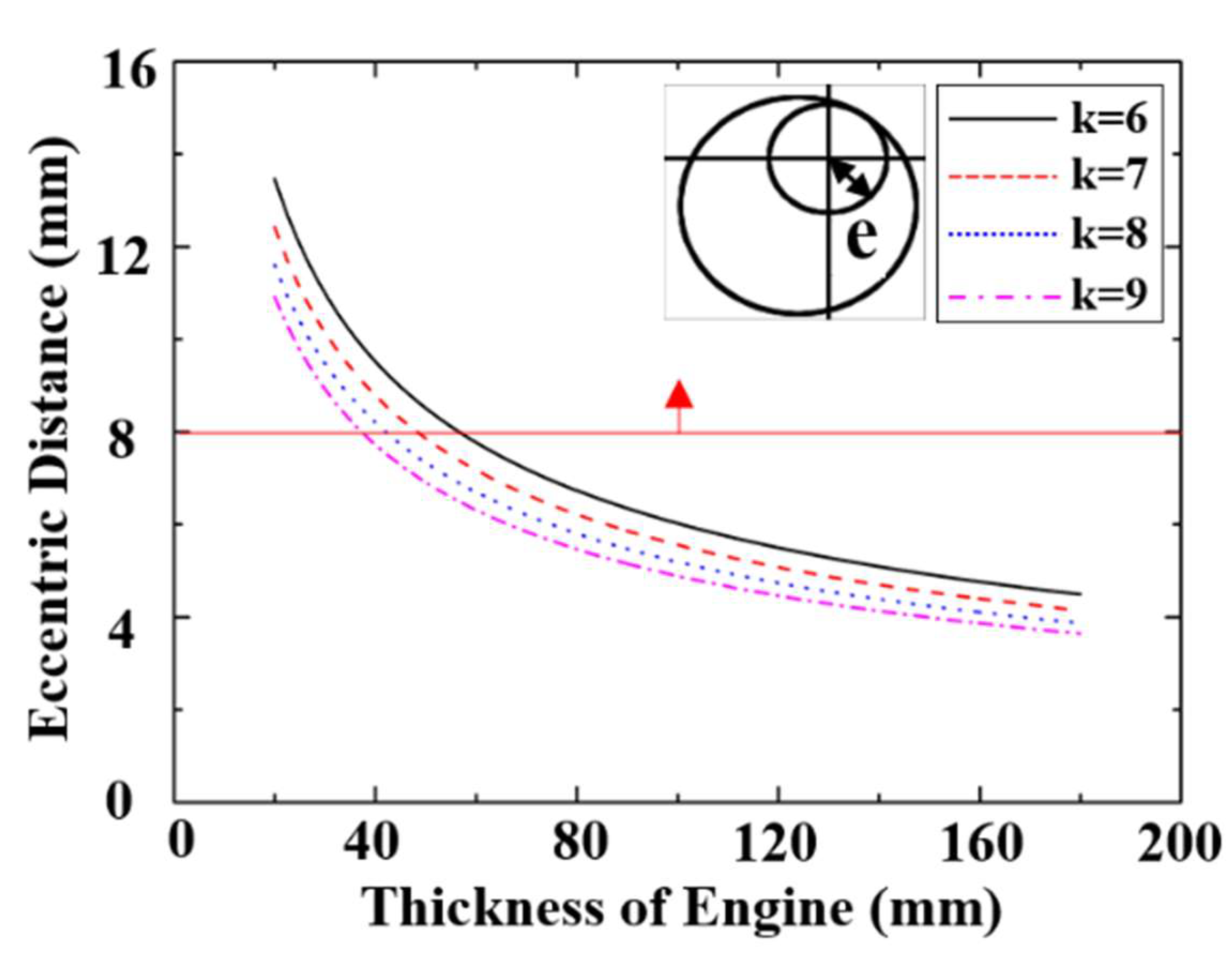
- The proposed GP3 engine design sequence comprises determining rotor and housing shape functions, deriving optimal relationships between combustion chamber volume and surface area, optimizing contact angle, and finally optimizing inlet and exhaust port effective area. We identified the main design parameters to be eccentric length (e), rotor length (RL), and engine thickness (H), and optimization of these three design parameters determines the engine shape.
- Criteria for designing the optimal GP3 shape are the eccentric shaft radius, which determines high-speed rotating power shaft durability; the contact angle, which determines the engine sealing ability; and the surface area to volume ratio, which indicates the heat loss level. A new GP3 rotary engine was designed and manufactured based on these optimal parameters.
- Optimizing engine thickness (H) and ratio of rotor length and eccentric length (k) revealed that reducing H and increasing k were favorable for optimal design, and this principle was applied to actual engine production.
- We calculated optimal k = 8 and H = 30 mm and confirmed that all the criteria for the optimal shape design could be satisfied.
- The calculated effective area for the proposed GP3 engine was applied for flow analysis and accurate intake and exhaust flow analysis.
- Motoring tests with core parts and auxiliary devices designed from these study outcomes confirmed that the maximum compression pressure at 3000 rpm was maintained at 13.5 bar and operated normally.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| A | area |
| EA | effective area |
| EAIP | effective area intake port |
| EAEP | effective area exhaust port |
| BDC | bottom dead center |
| CR | compression ratio |
| Cy | cylinder |
| EC | exhaust chamber |
| EP | exhaust port |
| EW | exhaust window |
| GP3 | Gerotor pump with three robes |
| IC | intake chamber |
| IW | intake window |
| IP | intake port |
| P | pressure |
| PSA | power shaft angle |
| RE | reciprocating engine |
| RTE | rotary engine |
| SRA | shaft rotation angle |
| ST | surge tank |
| St | stroke |
| TDC | top dead center |
| Vc | Combustion chamber Volume |
| Vcy | Cylinder Volume |
| WE | Wankel engine |
| Subscripts | |
| E | effective |
| C | clearance |
| D | displacement |
References
- Heywood, J.B. Internal Combustion Engine Fundamentals; McGraw-Hill: New York, NY, USA, 1988. [Google Scholar]
- Engine Specifications. HONDA GXV120. Available online: https://www.engine-specs.net/honda/gxv120.html (accessed on 1 March 2021).
- Mikalsen, R. Internal combustion and reciprocating engine systems for small and micro combined heat and power (CHP) applications, small and micro combined heat and power (CHP) systems: Advanced design, performance, materials and applications. In Small and Micro Combined Heat and Power (CHP) Systems; Elsevier: Amsterdam, The Netherlands, 2011; pp. 125–146. [Google Scholar] [CrossRef]
- Wankel, F. Rotary Internal Combustion Engine. U.S. Patent US2,988,065 A, 1958. [Google Scholar]
- Wikipedia. Wankel Engine. Available online: https://en.wikipedia.org/wiki/Wankel_engine (accessed on 1 March 2021).
- Bartrand, T.A.; Willis, E.A. Rotary engine performance limits predicted by a zero-dimensional model 920301. J. Engines 1992, 101, 442–458. [Google Scholar]
- Shkolnik, N.; Shkolnik, A.C. Cycloid Rotor Engine. U.S. Patent US2012-0294747A1, 17 July 2012. [Google Scholar]
- Colbourne, J.R. The geometry of trochoid envelopes and their application in rotary pumps. Mech. Mach. Theory 1974, 9, 421–435. [Google Scholar] [CrossRef]
- Gamez-Montero, P.J.; Codina, E. Flow characteristics of a trochoidal-gear pump using bond graphs and experimental measurement. Part 1. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2007, 221, 331–346. [Google Scholar] [CrossRef]
- Leboeuf, M.; Dufault, J.F.; Nickerson, M.; Becker, K.; Kopache, A.; Shkolnik, N.; Shkolnik, A.; Picard, M. Performance of a Low-Blowby Sealing System for a High Efficiency Rotary Engine. In SAE Technical Paper; SAE International: Warrendale, PA, USA, 2018; pp. 1–10. [Google Scholar]
- Shkolnik, N.; Shkolnik, A. Rotary High Efficiency Hybrid Cycle Engine. In SAE Technical Paper; SAE International: Warrendale, PA, USA, 2008. [Google Scholar]
- Shkolnik, A.; Littera, D.; Nickerson, M.; Shkolnik, N.; Cho, K. Development of a Small Rotary SI/CI Combustion Engine. In SAE Technical Paper; SAE International: Warrendale, PA, USA, 2014. [Google Scholar]
- Littera, D.; Nickerson, M.; Kopache, A.; Machamada, G.; Sun, C.; Schramm, A.; Medeiros, N.; Becker, K.; Shkolnik, N.; Shkolnik, A. Development of the XMv3 high efficiency cycloidal engine. In SAE Technical Paper; SAE International: Warrendale, PA, USA, 2015. [Google Scholar]
- Shkolnik, A.; Shkolnik, N.; Scarcella, J.; Nickerson, M.; Kopache, A.; Becker, K.; Bergin, M.; Spitulnik, A.; Equiluz, R.; Fagan, R.; et al. Compact, Lightweight, high efficiency rotary engine for generator, APU, and range-extended electric vehicles. In Proceedings of the NDIA Ground Vehicle Systems Engineering and Technology Symposium, Novi, MI, USA, 7–9 August 2018; pp. 16–18. [Google Scholar]
- Costa, T.J.; Nickerson, M.; Littera, D.; Martins, J.; Shkolnik, A.; Shkolnik, N.; Brito, F. Measurement and prediction of heat transfer losses on the xmv3 rotary engine. SAE Int. J. Engines 2016, 9, 2368–2380. [Google Scholar] [CrossRef]
- Shung, J.B.; Pennock, G.R. Geometry for trochoidal-type machines with conjugate envelopes. Mech. Mach. Theory 1994, 29, 25–42. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Specification |
|---|---|
| Fuel type | City gas (CH4) |
| Number of cylinders | 3 |
| Combustion volume (CV) | 11 cc |
| Delivery volume (DV) | 112 cc |
| Compression ratio (CR) | 11 |
| Total delivery volume (TDV) | 336 cc |
| Parameter | Values | Optimal Value |
|---|---|---|
| k | 6, 7, 8, 9 | 8 |
| H | 20–180 mm | 30 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.-J.; Park, T.-J.; Yang, J.-H.; Lee, C.-E. Optimal Design for New Rotary Engine with Geometric Shape Functions on Combustion Chamber and Ports. Energies 2024, 17, 1754. https://doi.org/10.3390/en17071754
Kim Y-J, Park T-J, Yang J-H, Lee C-E. Optimal Design for New Rotary Engine with Geometric Shape Functions on Combustion Chamber and Ports. Energies. 2024; 17(7):1754. https://doi.org/10.3390/en17071754
Chicago/Turabian StyleKim, Young-Jic, Tae-Joon Park, Ji-Hyuck Yang, and Chang-Eon Lee. 2024. "Optimal Design for New Rotary Engine with Geometric Shape Functions on Combustion Chamber and Ports" Energies 17, no. 7: 1754. https://doi.org/10.3390/en17071754
APA StyleKim, Y. -J., Park, T. -J., Yang, J. -H., & Lee, C. -E. (2024). Optimal Design for New Rotary Engine with Geometric Shape Functions on Combustion Chamber and Ports. Energies, 17(7), 1754. https://doi.org/10.3390/en17071754