Comparison of Extremum-Seeking Control Techniques for Maximum Power Point Tracking in Photovoltaic Systems

Abstract
:1. Introduction
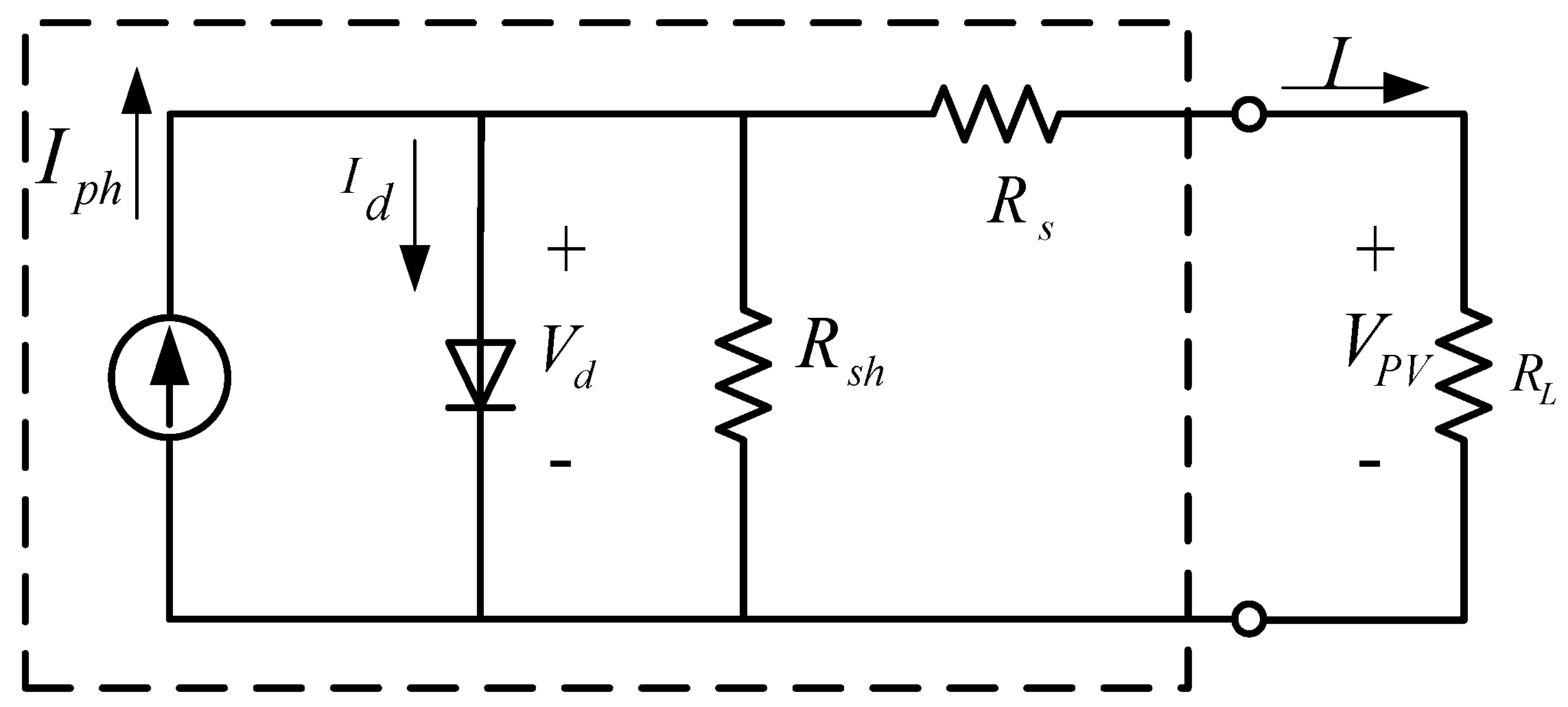
2. Solar Cell Characteristics





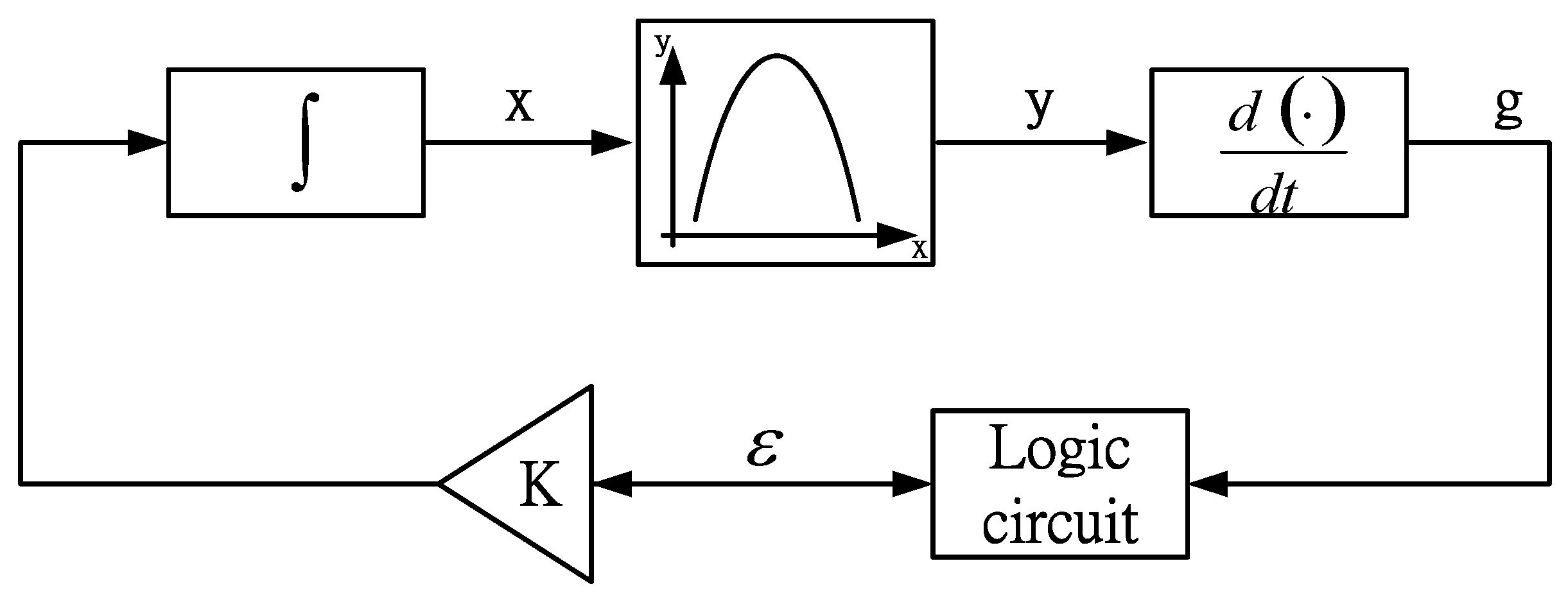
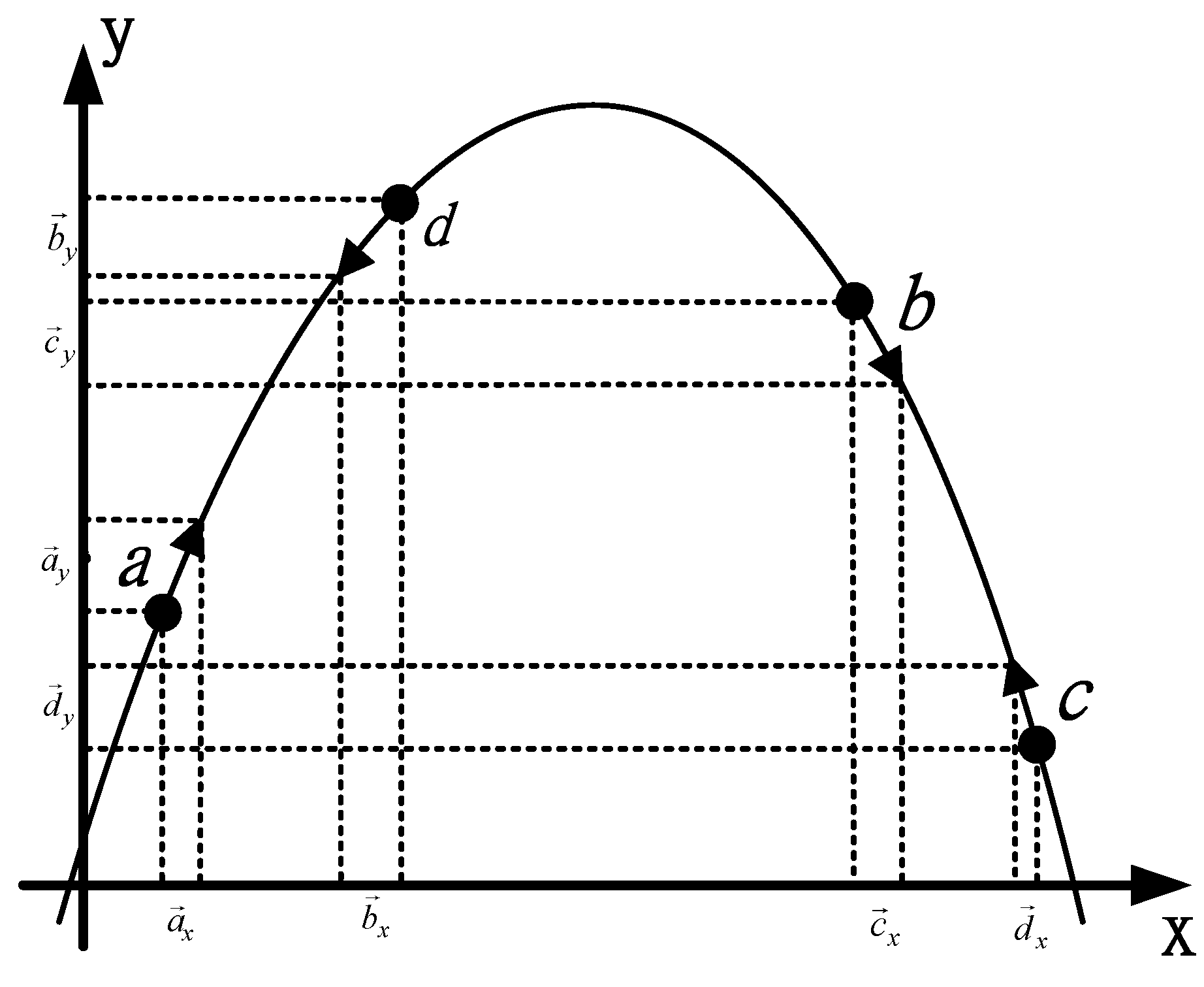
3. Extremum Seeking Control (ESC) Principle














 , i.e., a validated stability.
, i.e., a validated stability.
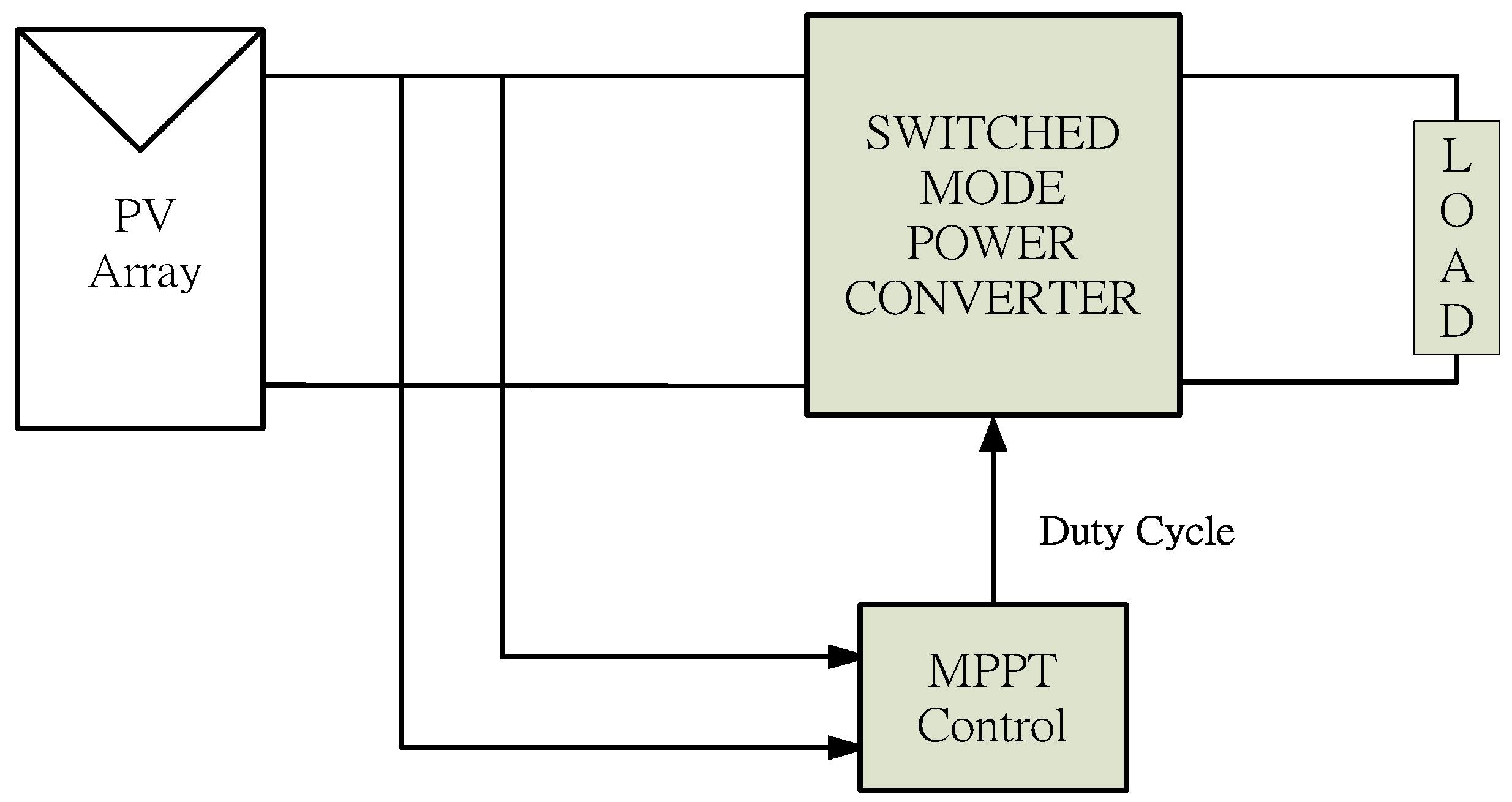
4. Configuration

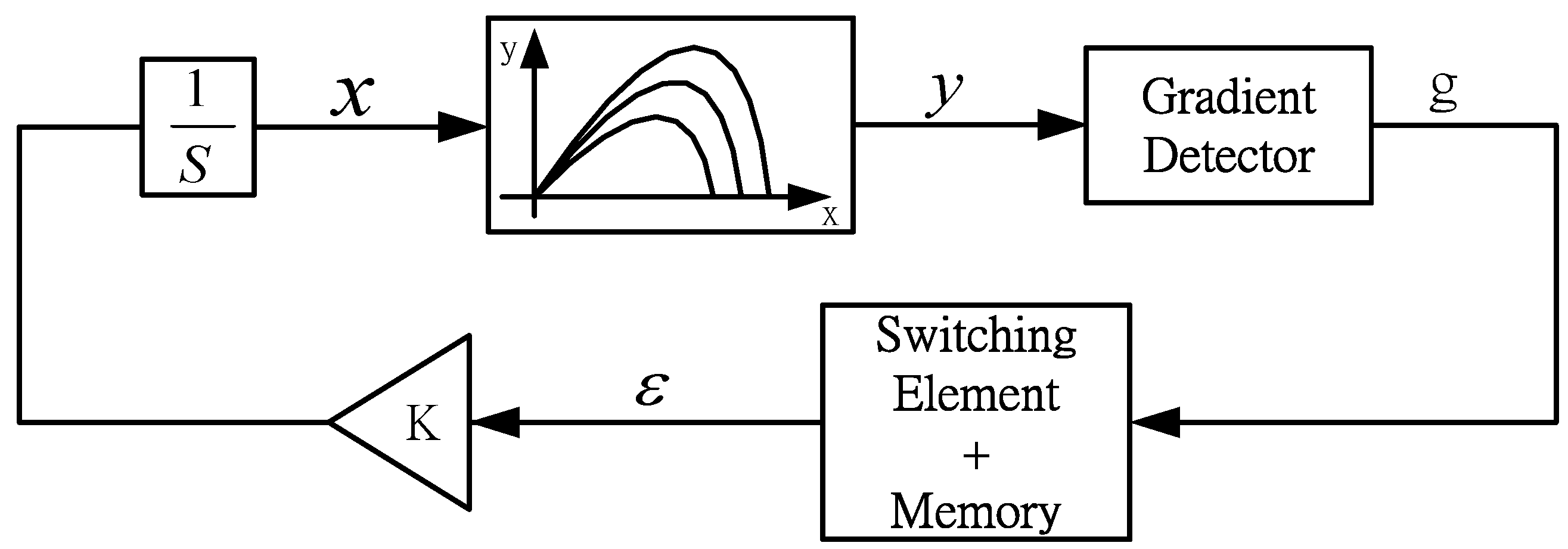
4.1. Extremum-Seeking Control

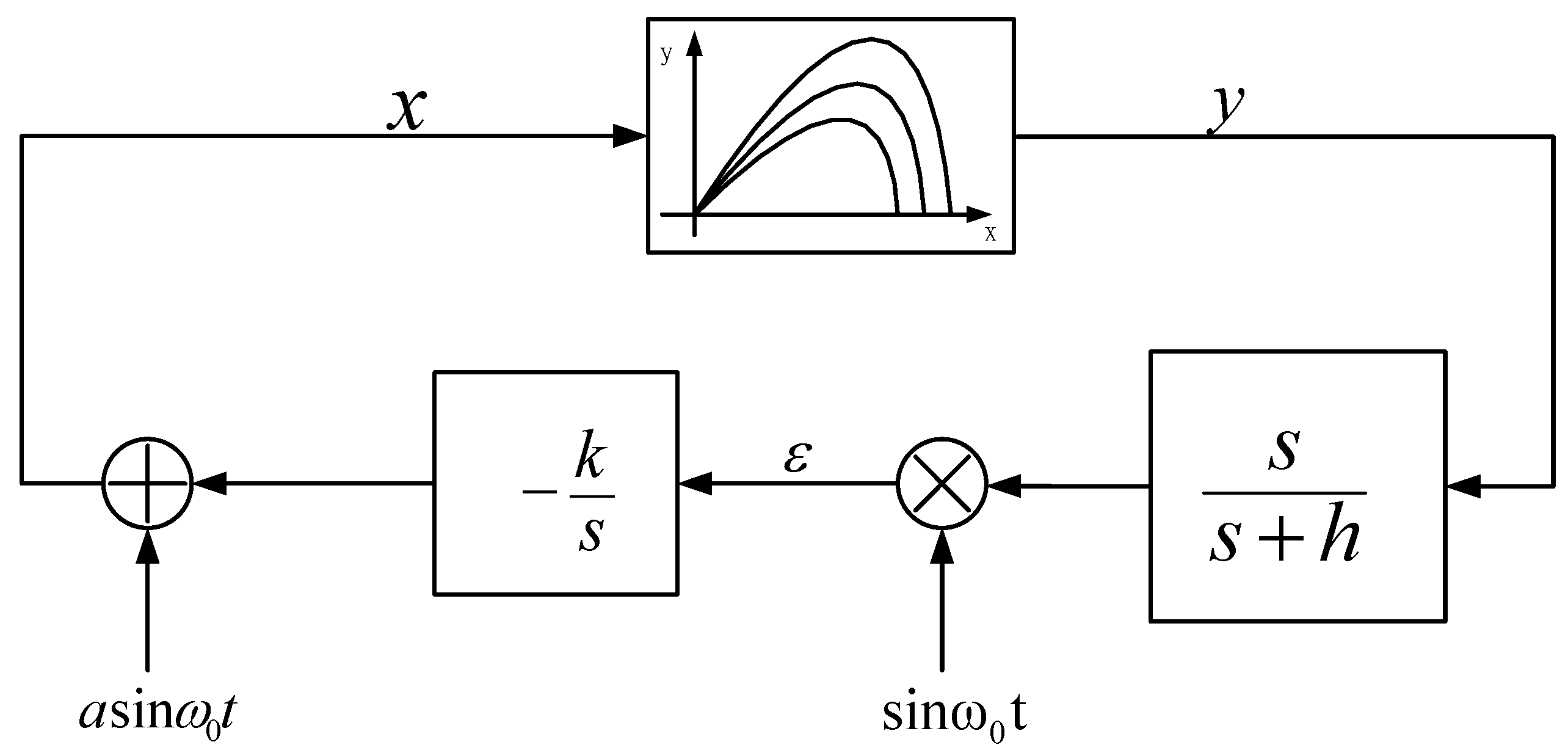
4.2. Sinusoidal Extremum-Seeking Control


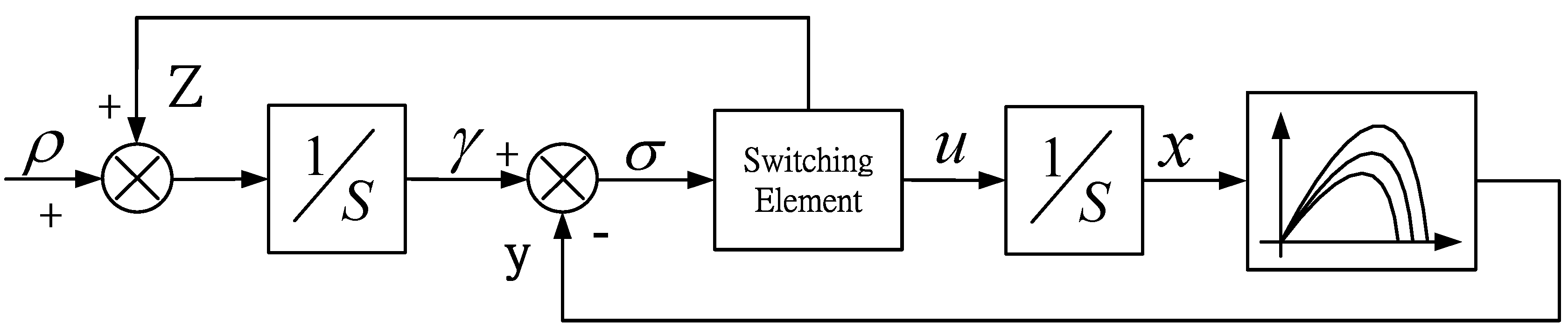
4.3. Sliding Mode Extremum-Seeking Control




 tends to zero, and it is assumed that Z0 >> ρ and Z0 >> U0. Therefore, a chance of suitable positive Z0 satisfies:
tends to zero, and it is assumed that Z0 >> ρ and Z0 >> U0. Therefore, a chance of suitable positive Z0 satisfies:


5. Results and Discussion

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
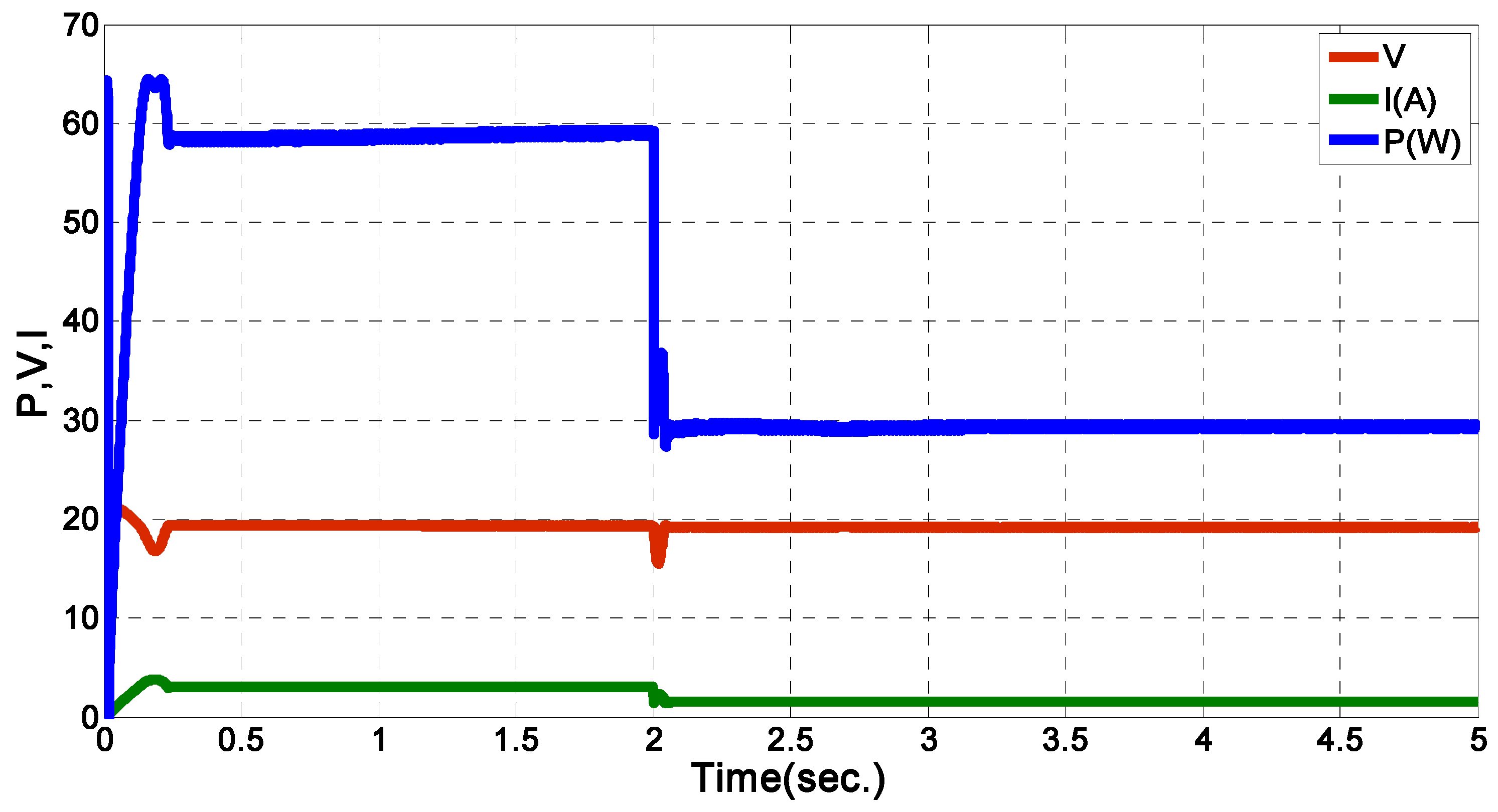
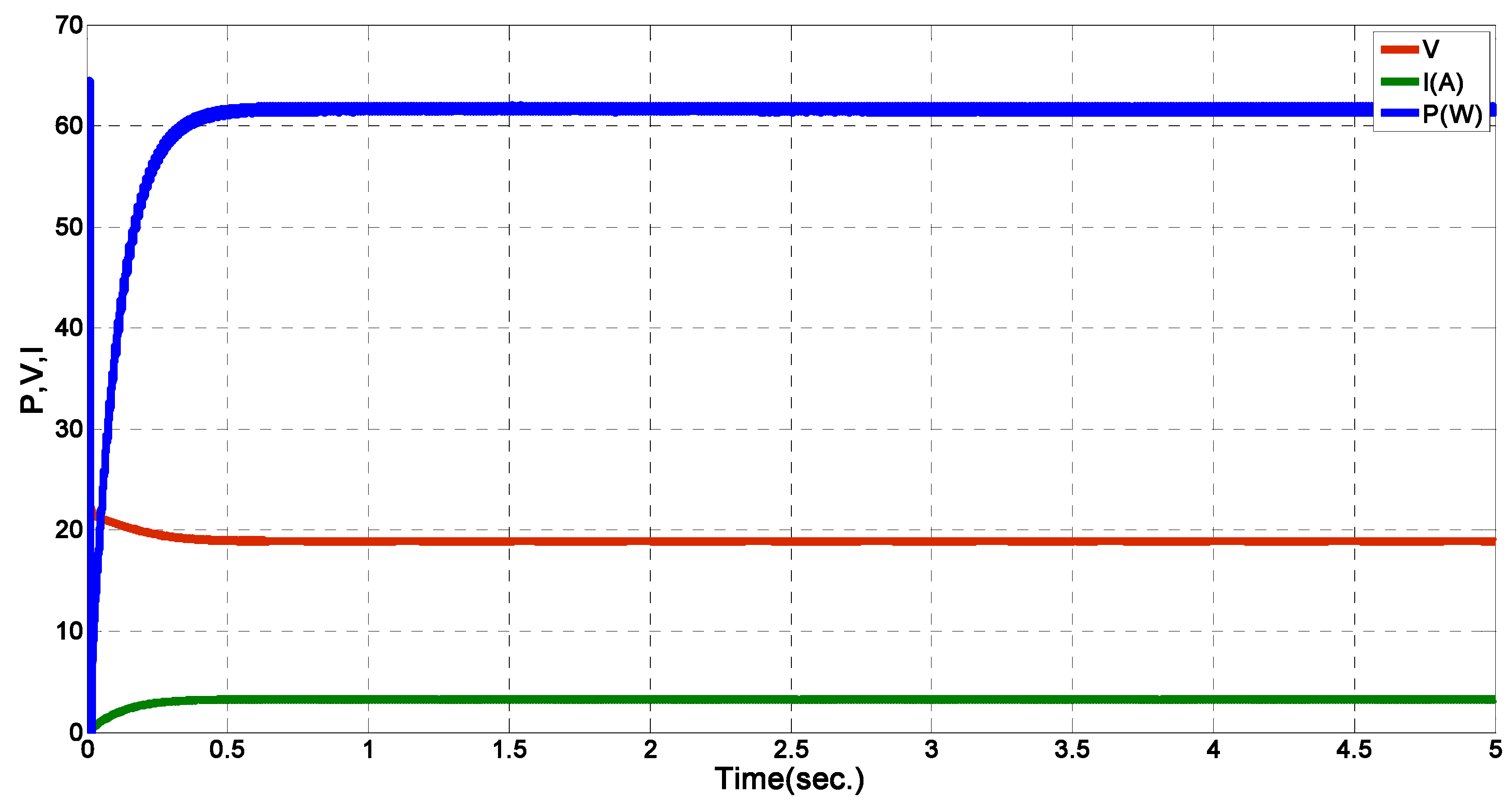
| Pmax | VMPP | IMPP | Voc | Isc |
|---|---|---|---|---|
| 65 W | 17.4 V | 3.75 A | 21.7 V | 3.99 A |
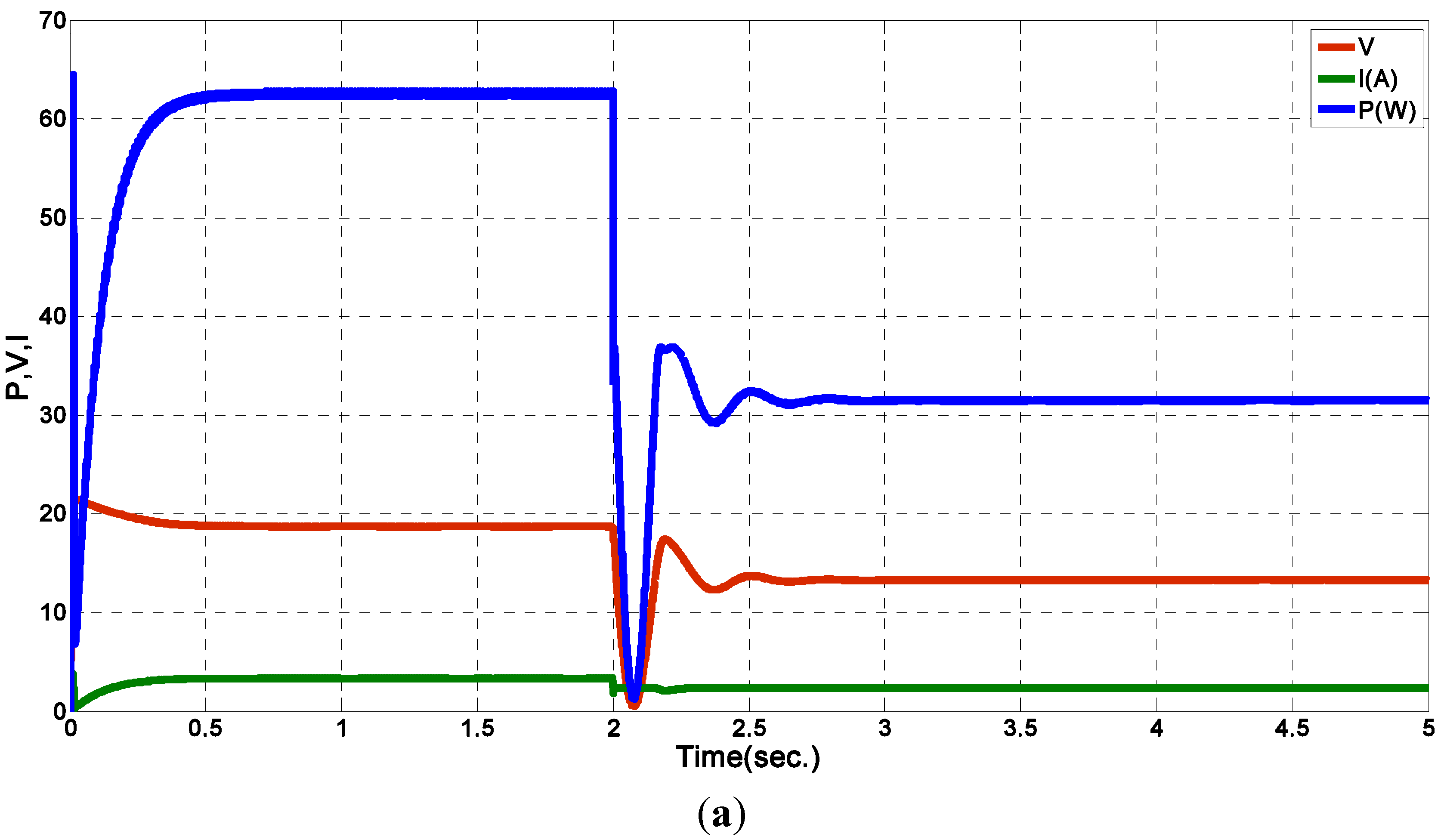
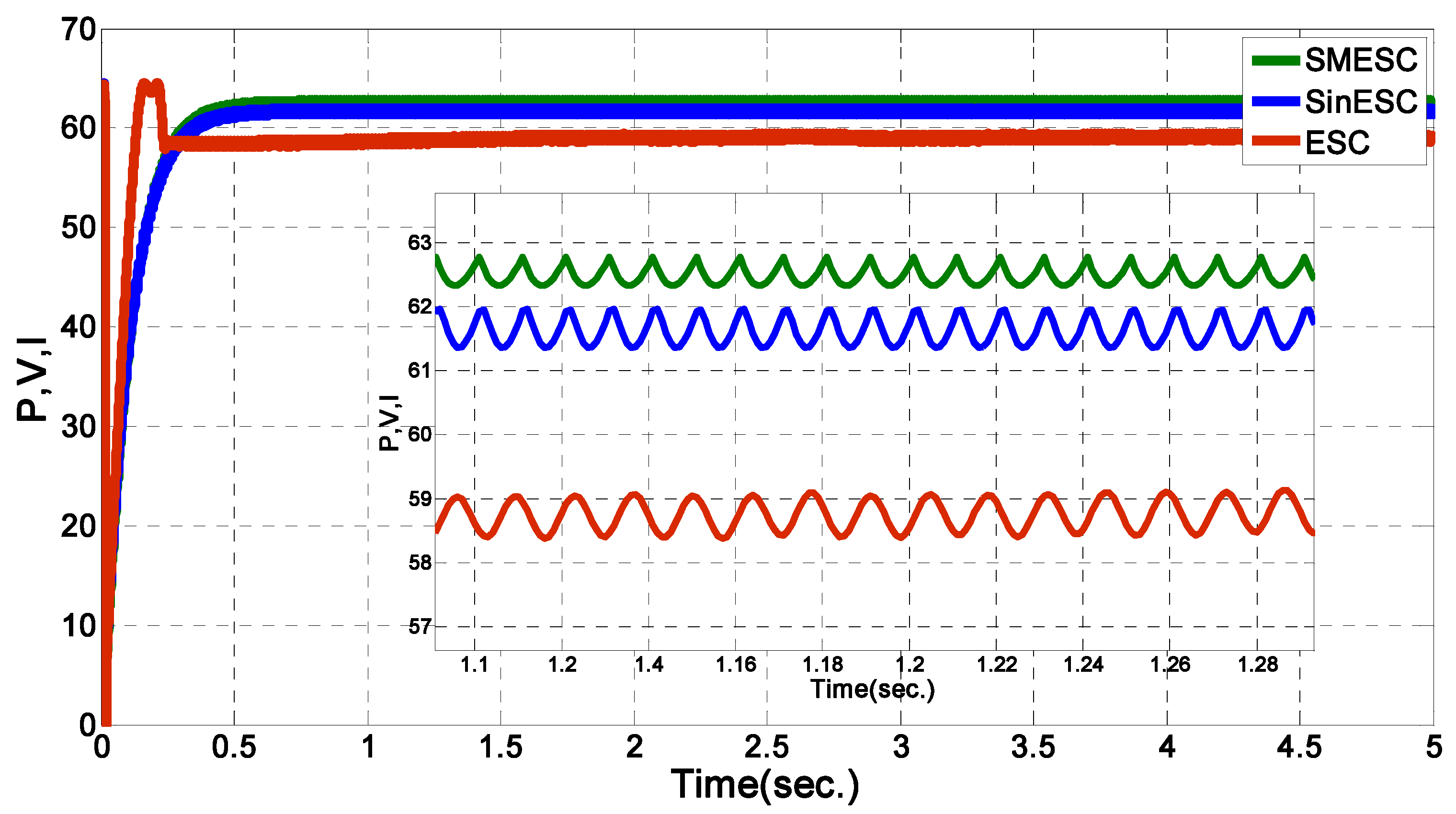
5.1. Extremum-Seeking Control


5.2. Sinusoidal Extremum-Seeking Control


5.3. Sliding Mode Extremum-Seeking Control




6. Conclusions
Acknowledgments
References
- Krinker, M.; Goykadosh, A. Renewable and Sustainable Energy Replacement Sources. In Proceedings of the IEEE Applications and Technology Conference (LISAT), Farmingdale, NY, USA, 7 May 2010.
- Kuo, Y.C.; Liang, T.J. Novel maximum-power-point-tracking controller for photovoltaic energy conversion system. IEEE Trans. Ind. Electron. 2002, 48, 594–601. [Google Scholar]
- Liu, F.; Duan, S.F.; Liu, B.; Kang, Y. A variable step size INC MPPT method for PV systems. IEEE Trans. Ind. Electron. 2008, 55, 2622–2628. [Google Scholar] [CrossRef]
- Cesare, G.D.; Caputo, D.; Nascetti, A. Maximum power point tracker for portable photovoltaic systems with resistive-like load. Sol. Energy 2006, 80, 982–988. [Google Scholar] [CrossRef]
- Wen, F.; Diao, Z.; Chao, Y.; Mo, R. The Design and Implementation of Photovoltaic Grid-connected Simulating Device Based on FPGA. In Proceedings of the IEEE Power and Energy Engineering Conference, Chengdu, China, 28–31 March 2010.
- Benmessaoud, M.T.; Zerhouni, F.Z.; Zegrar, M.; Stambuli, A.B.; Tioursi, M. New approach modeling and a maximum power point tracking method for solar cells. Comput. Math. Appl. 2010, 60, 1124–1134. [Google Scholar] [CrossRef]
- Ariyur, K.; Krstic, M. Real-Time Optimization by Extremum Seeking Control; Wiley: New York, NY, USA, 2003. [Google Scholar]
- Brunton, S.L.; Rowley, C.W.; Kulkarni, S.R.; Clarkson, C. Maximum power point tracking for photovoltaic optimization using ripple-based extremum seeking control. IEEE Trans. Power Electron. 2010, 25, 2531–2540. [Google Scholar] [CrossRef]
- Leyva, R.; Alonso, C.; Queinnec, I.; Cid-Pastor, A.; Lagrange, D.; Martinez-Salamero, L. MPPT of photovoltaic system using extremum-seeking control. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 249–258. [Google Scholar] [CrossRef]
- Brunton, S.L.; Rowley, C.W.; Kulkarni, S.R.; Clarkson, C. Maximum Power Point Tracking for Photovoltaic Optimization Using Extremum Seeking. In Proceedings of the IEEE Photovoltaic Specialists Conference, Philadelphia, PA, USA, 7–12 June 2009.
- Cabal, C.; Alonso, C.; Cid-Pastor, A.; Estibals, B.; Seguier, L.; Leyva, R.; Schweitz, G.; Alzieu, J. Adaptive Digital MPPT Control for Photovoltaic Applications. In Proceedings of the IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007.
- Leyva, R.; Artillan, P.; Cabal, C.; Estibals, B.; Alonso, C. Dynamic performance of maximum power point tracking circuits using sinusoidal extremum seeking control for photovoltaic generation. Int. J. Electron. 2011, 98, 529–542. [Google Scholar] [CrossRef]
- Olalla, C.; Arteaga, M.I.; Leyva, R.; El Aroudi, A. Analysis and Comparison of Extremum Seeking Control Techniques. In Proceedings of the IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007.
- Chu, C.C.; Chen, C.L. Robust maximum power point tracking method for photovoltaic cells: A sliding mode control approach. Sol. Energy 2009, 83, 1370–1378. [Google Scholar]
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Yau, H.-T.; Wu, C.-H. Comparison of Extremum-Seeking Control Techniques for Maximum Power Point Tracking in Photovoltaic Systems. Energies 2011, 4, 2180-2195. https://doi.org/10.3390/en4122180
Yau H-T, Wu C-H. Comparison of Extremum-Seeking Control Techniques for Maximum Power Point Tracking in Photovoltaic Systems. Energies. 2011; 4(12):2180-2195. https://doi.org/10.3390/en4122180
Chicago/Turabian StyleYau, Her-Terng, and Chen-Han Wu. 2011. "Comparison of Extremum-Seeking Control Techniques for Maximum Power Point Tracking in Photovoltaic Systems" Energies 4, no. 12: 2180-2195. https://doi.org/10.3390/en4122180
APA StyleYau, H. -T., & Wu, C. -H. (2011). Comparison of Extremum-Seeking Control Techniques for Maximum Power Point Tracking in Photovoltaic Systems. Energies, 4(12), 2180-2195. https://doi.org/10.3390/en4122180