MPPT for Photovoltaic Modules via Newton-Like Extremum Seeking Control

Abstract
:1. Introduction



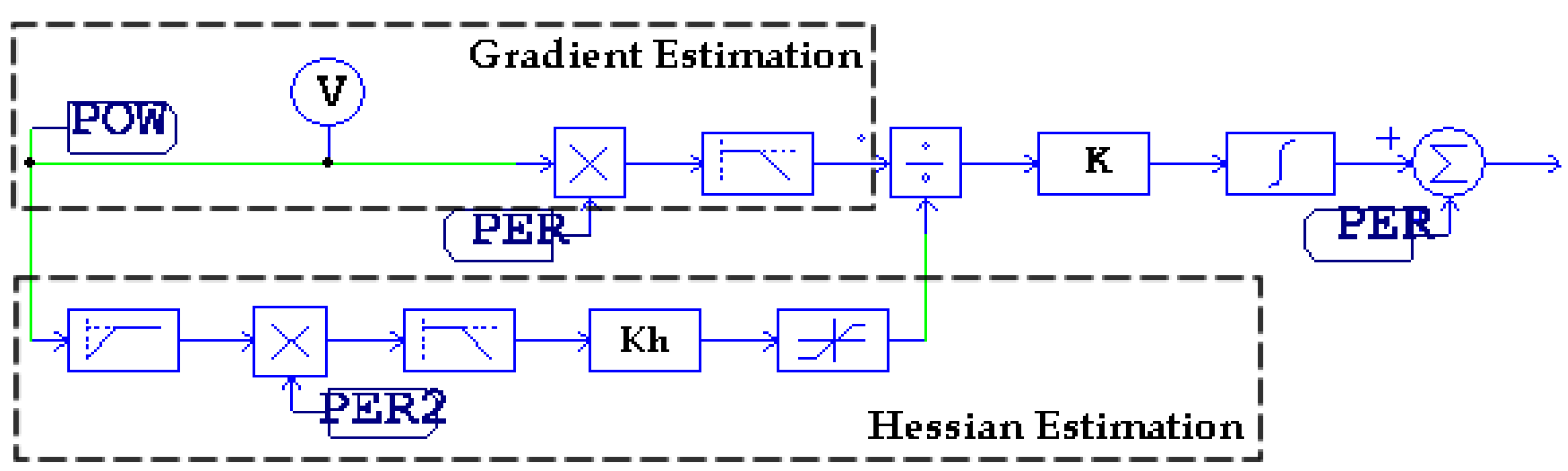
2. MPPT Based on NL-ESC Method
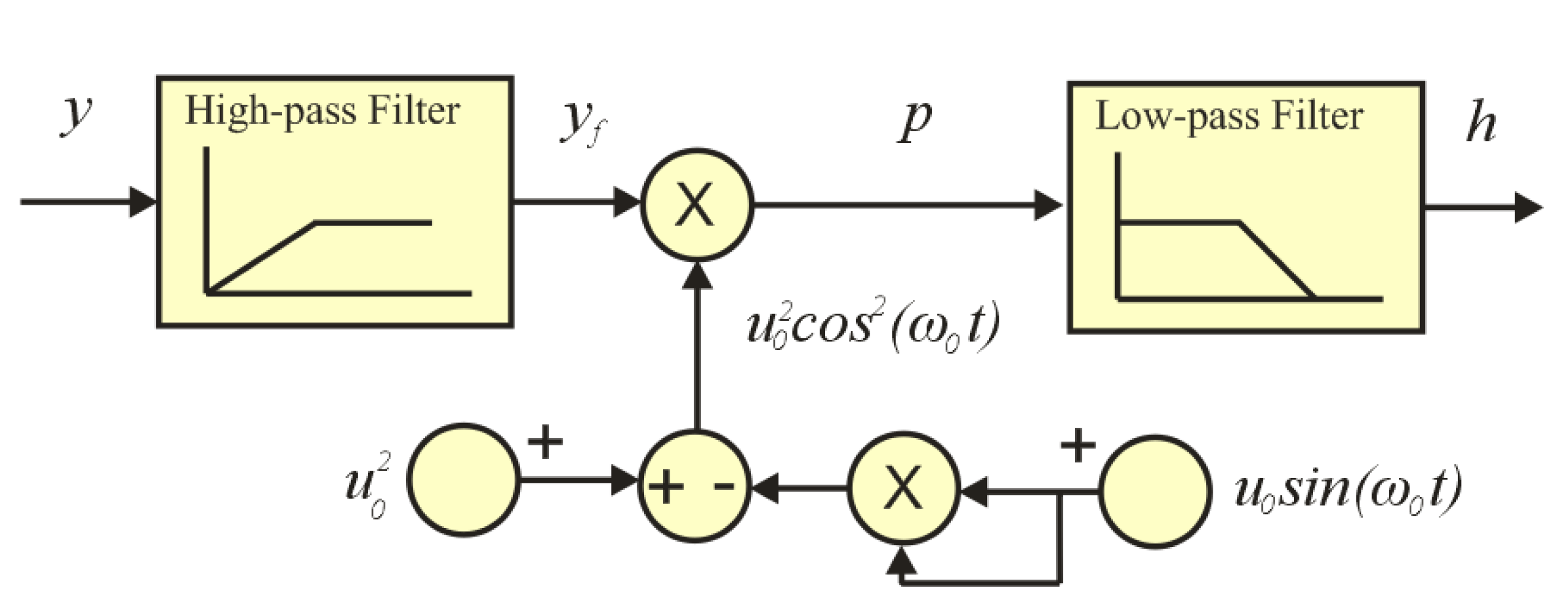
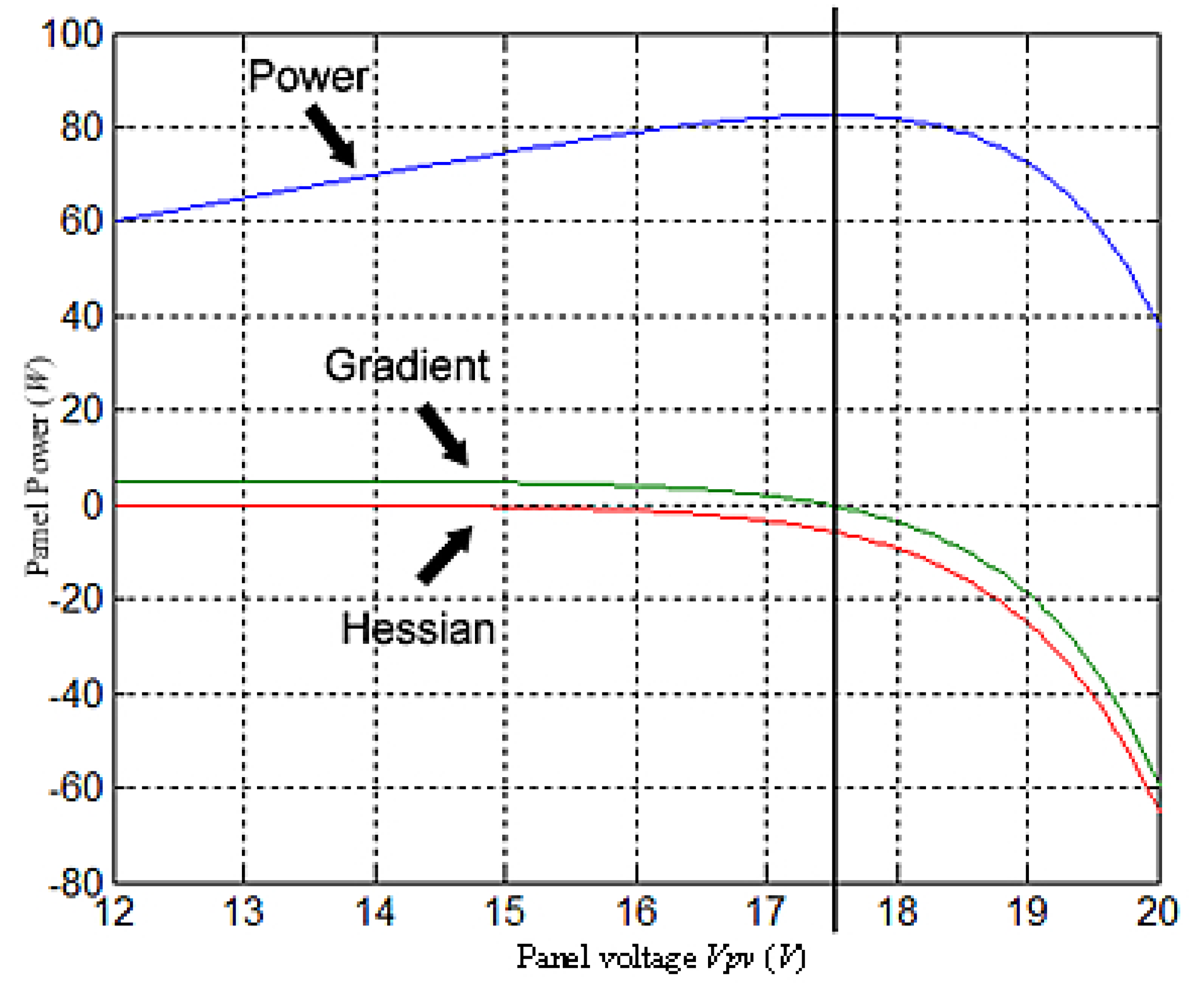
2.1. Hessian Estimation of the PV Panel Characteristic

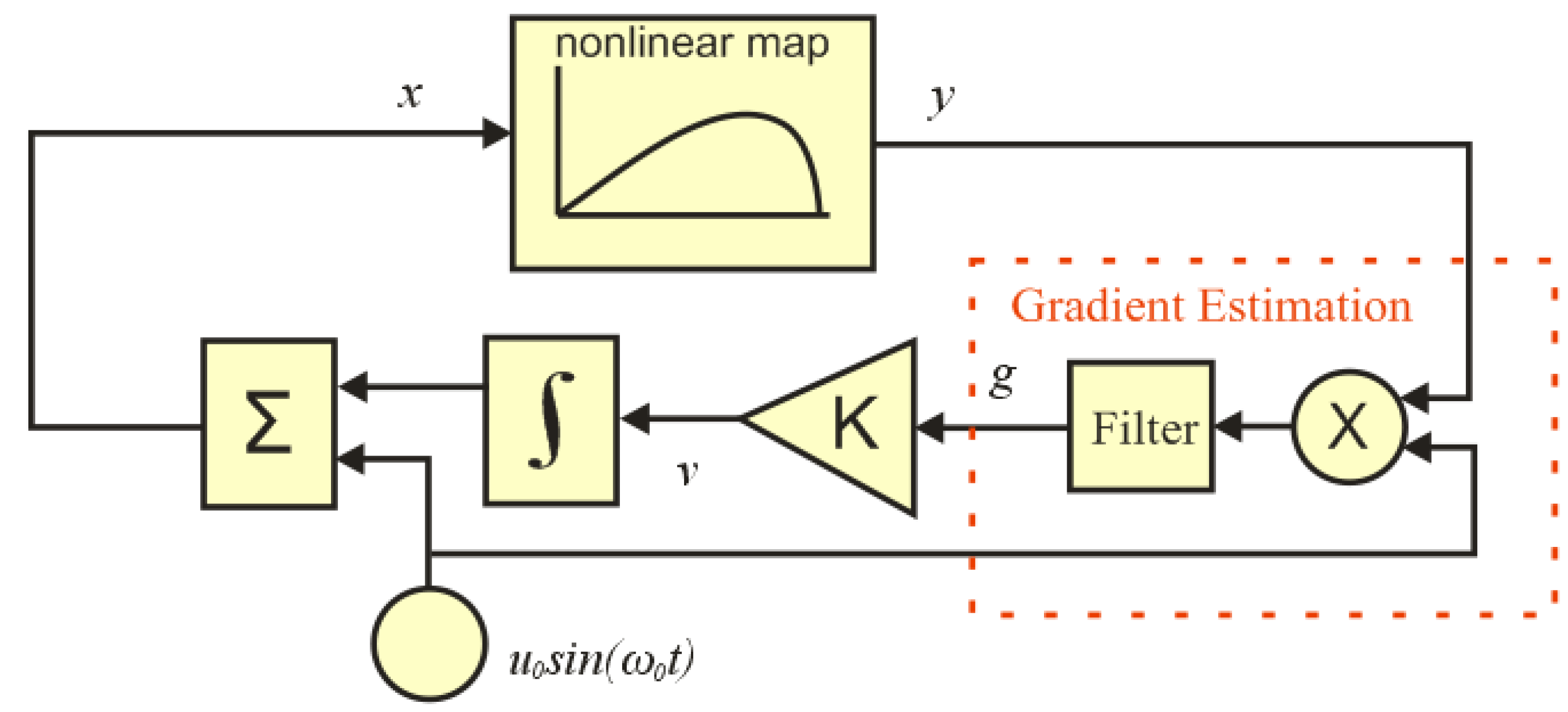
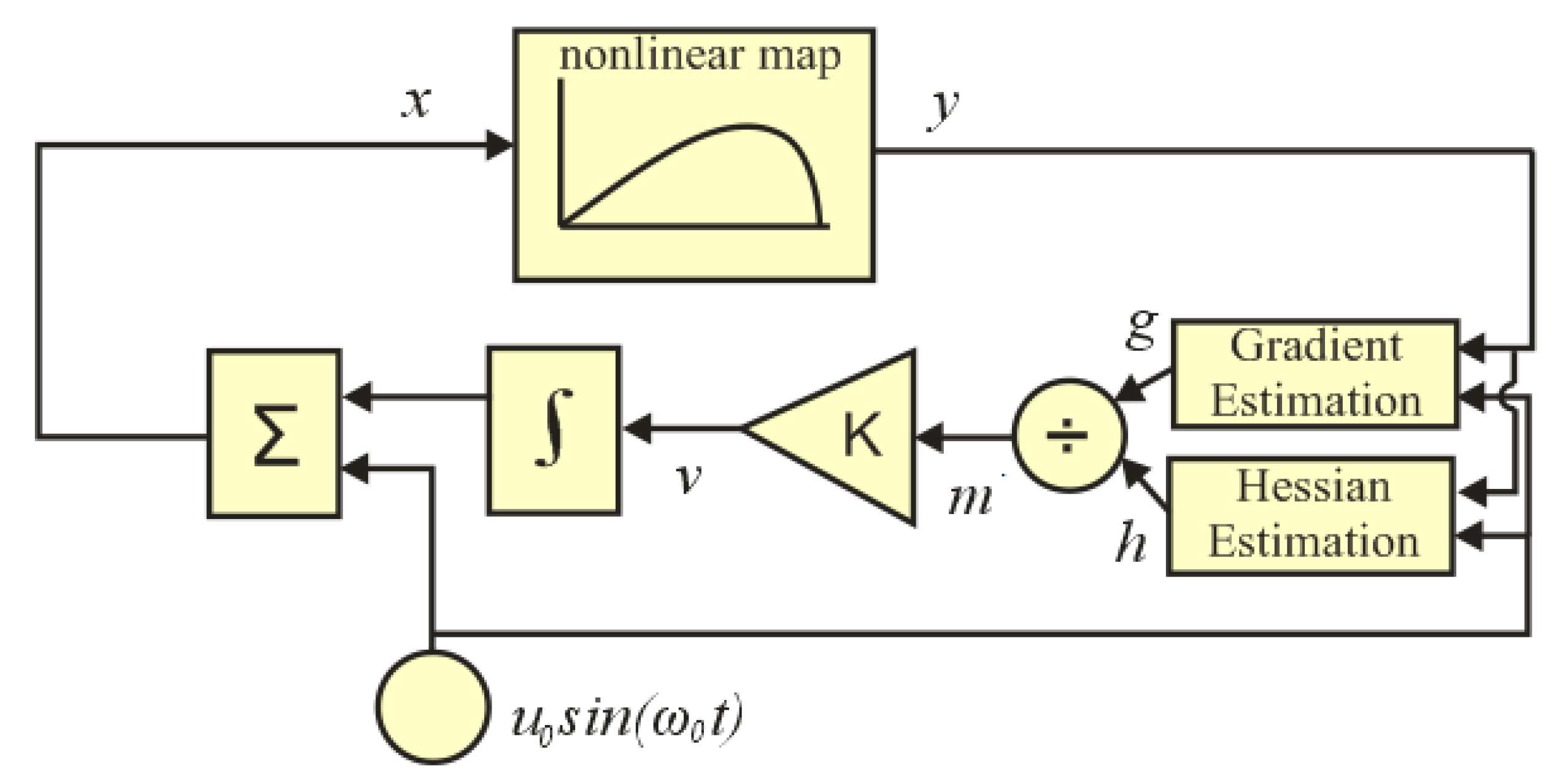
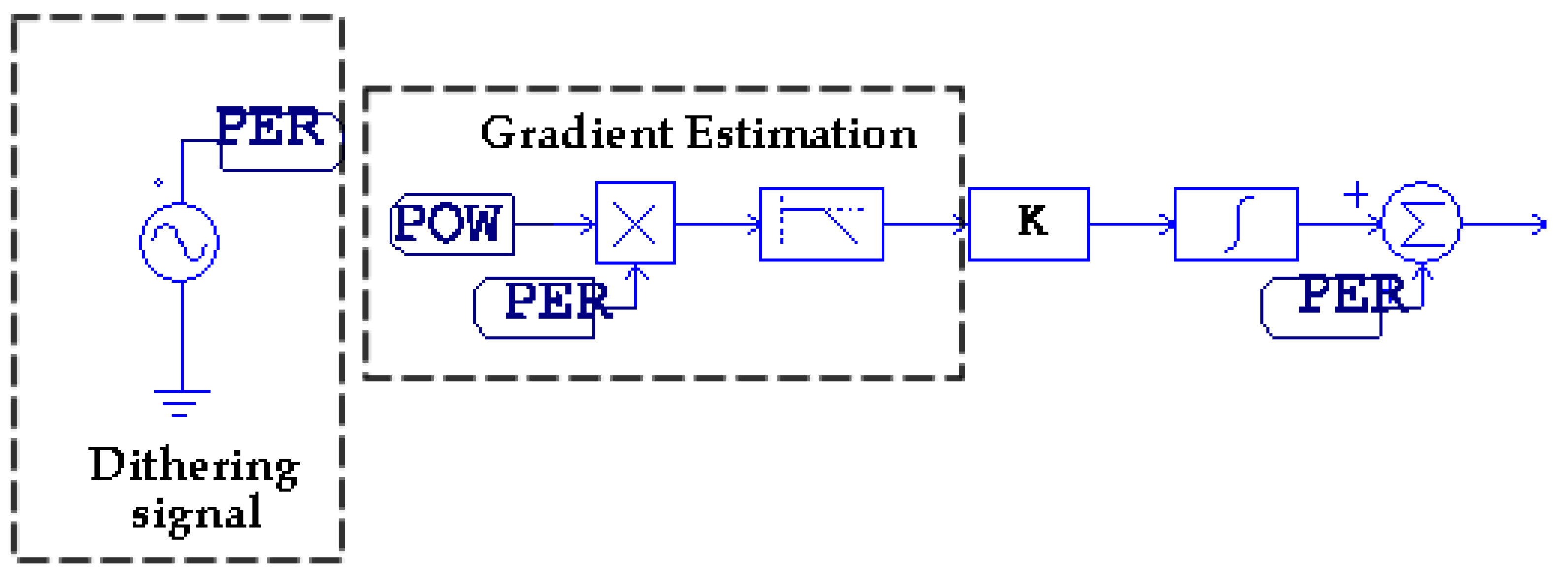
2.2. NL-ESC Method for MPPT in Photovoltaic Domain


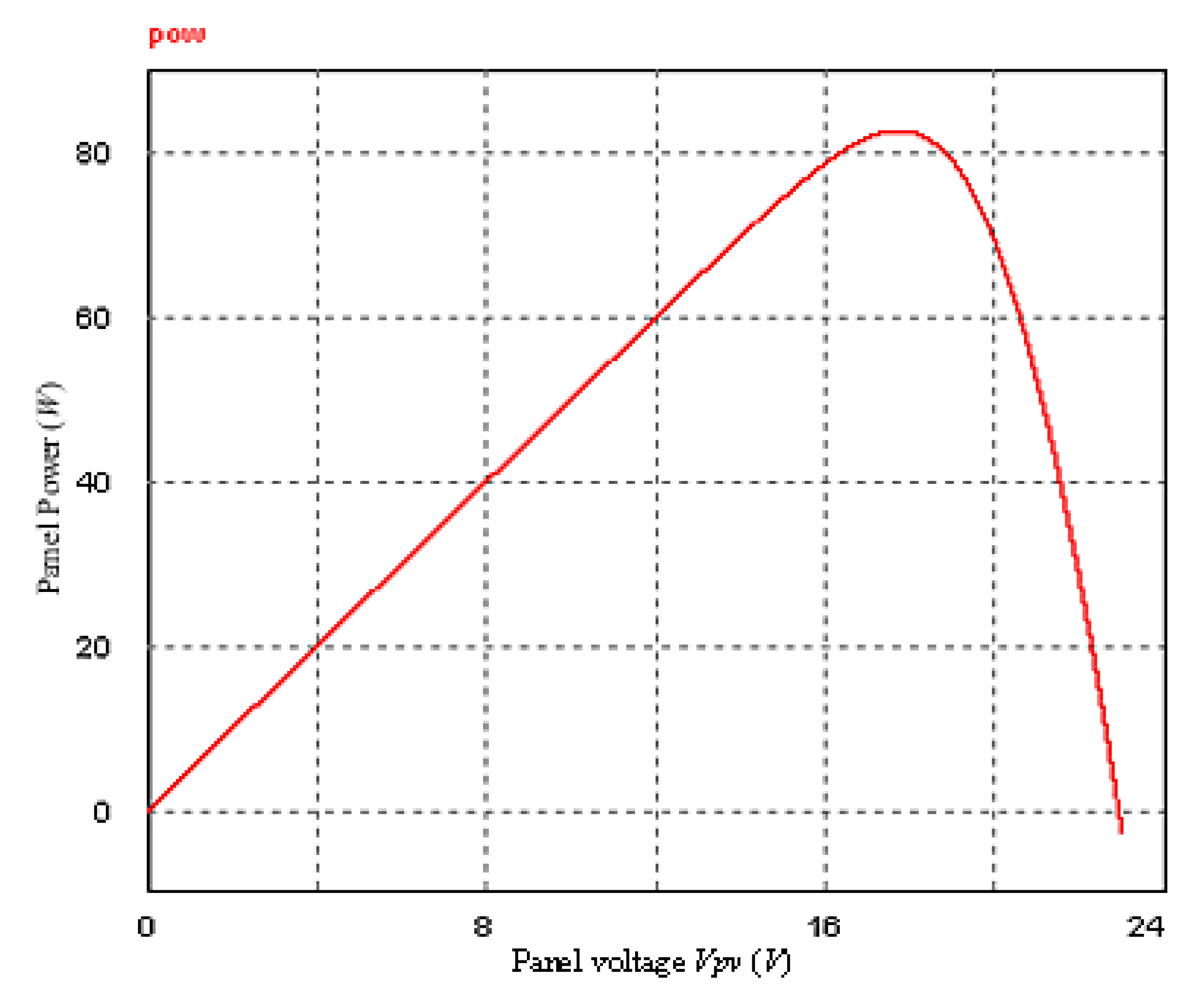
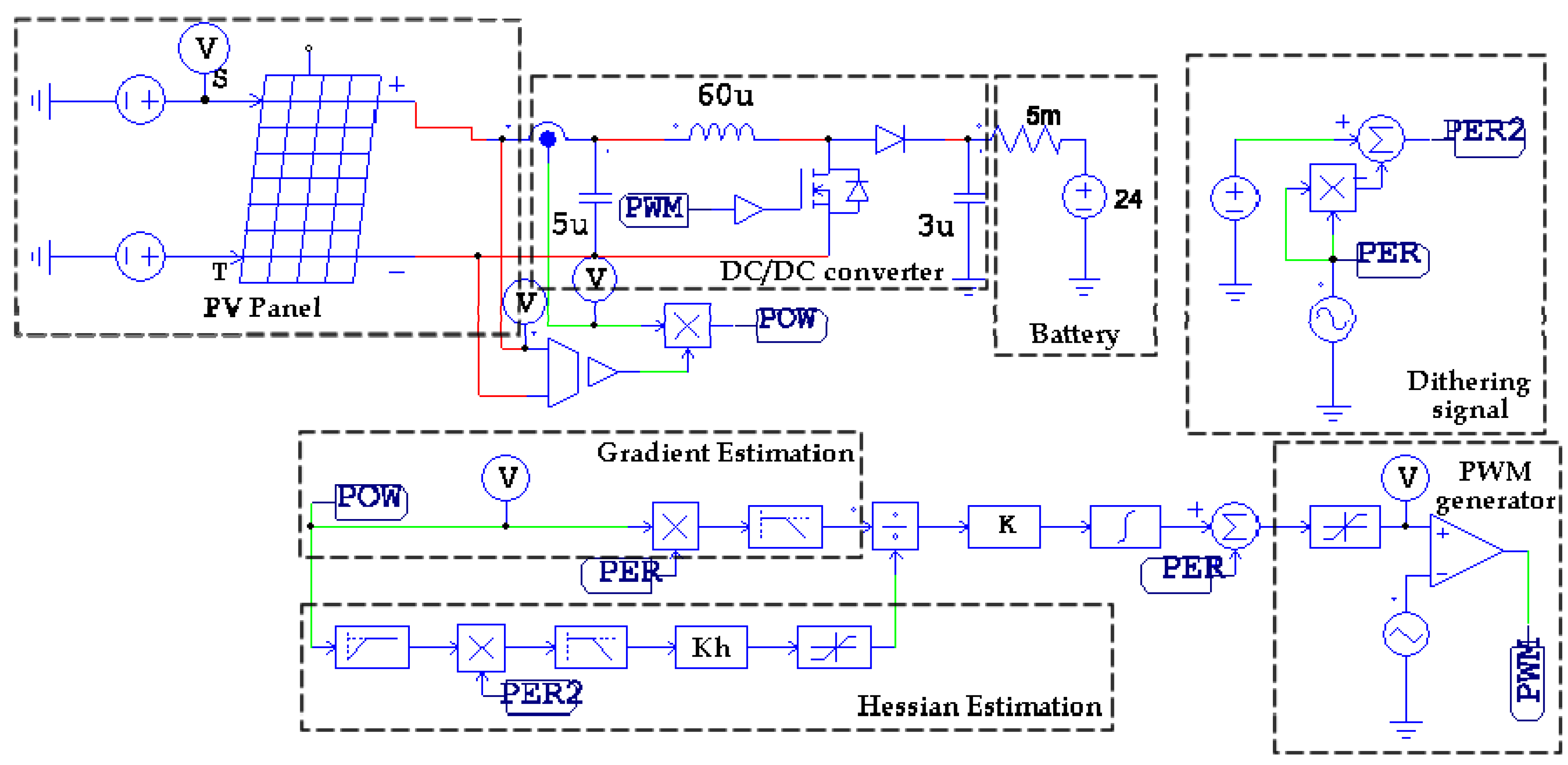
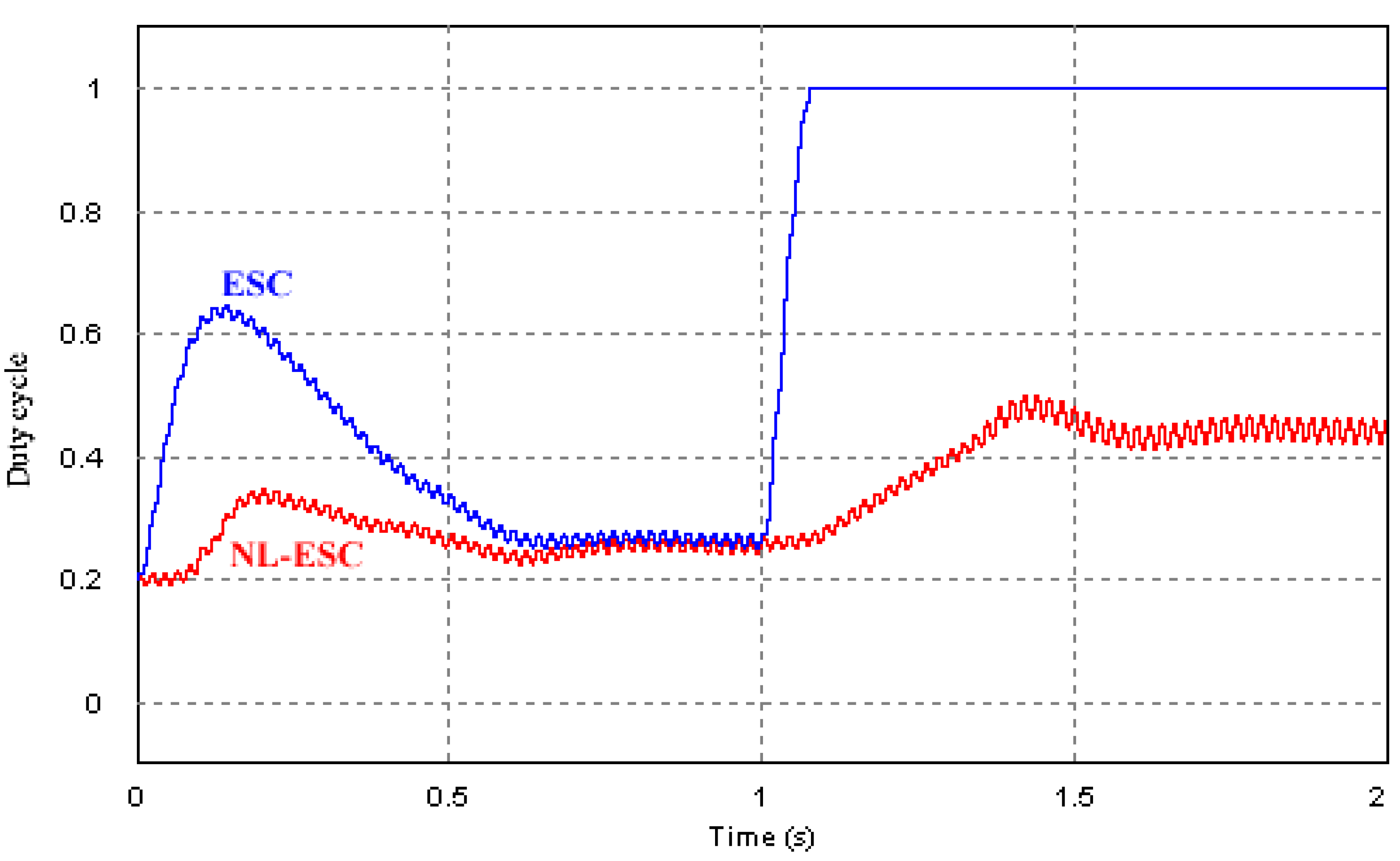
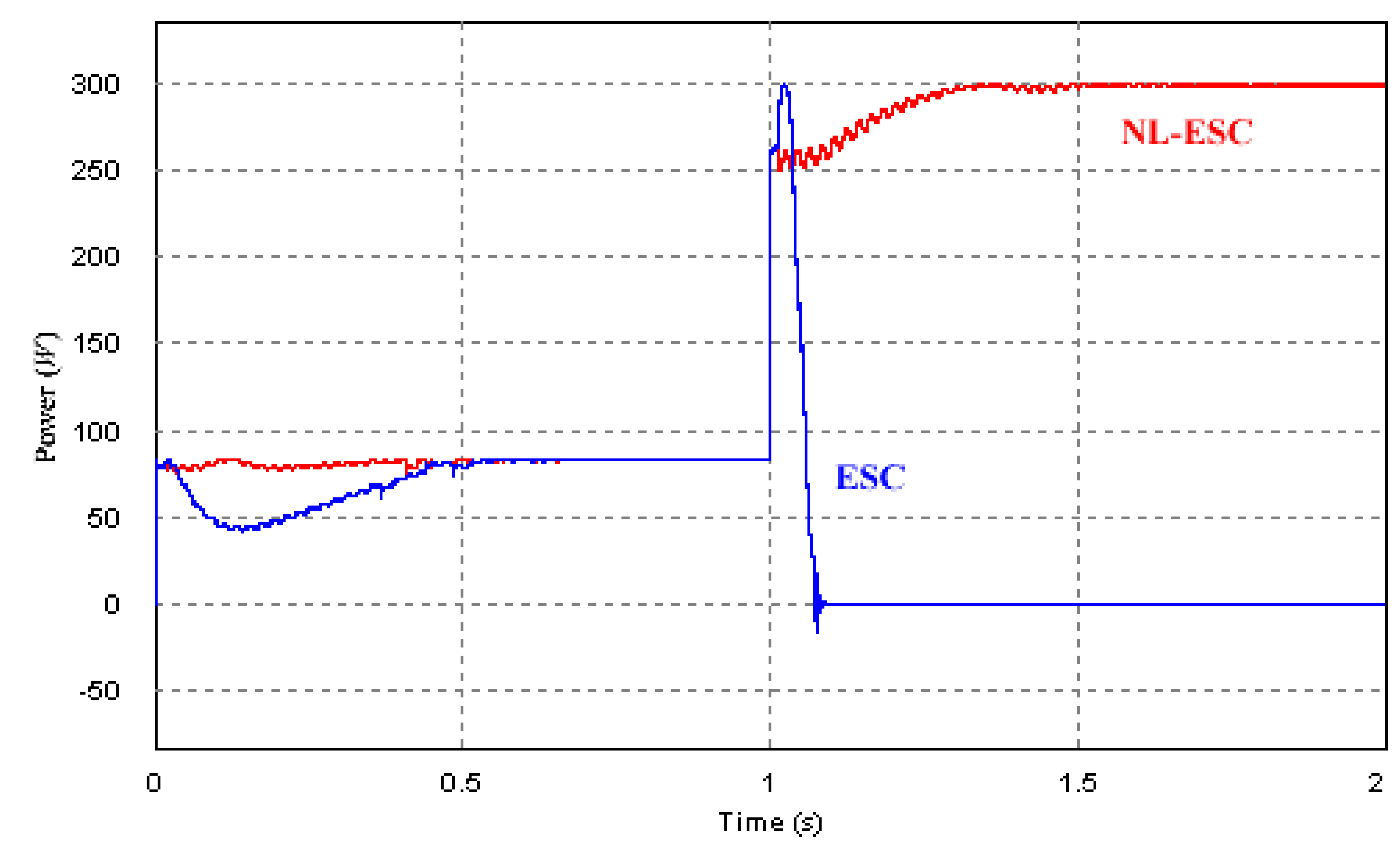
3. Comparison of ESC and NL-ESC MPPT by Means of PSIM Simulation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| u0 | H(s) | Kh | K | ||
|---|---|---|---|---|---|
| H0 | ξH | ω0H | |||
| 0.01 V | 1 | 1 | 10π rad/s | 3,000 | 0.2 |
| Ω0 | G(s) | Sat.bounds | |||
| G0 | ξG | ω0G | |||
| 50 Hz | 1 | 1 | 60π rad/s | 0.001 | 0.2 |
| u0 | H(s) | ω0 | K | ||
|---|---|---|---|---|---|
| H0 | ξH | ω0H | |||
| 0.01 V | 1 | 1 | 10π rad/s | 50 Hz | 200 |

| Numbers of cells (Ns) | 30 | Saturation Current (Is0) | 1.46 e−11 |
| Standard Light Intensity (S0) | 1,000 | Band Energy (Eg) | 1.12 |
| Reference Temperature (Tref) | 25 | Ideality Factor (a) | 1 |
| Series Resistance (Rs) | 0.005 | Temperature Coefficient (Ct) | 0.0024 |
| Shunt Resistance (Rsh) | 200k | Coefficient Ks | 0 |
| Short Circuit Current (Isc0) | 5 | ||

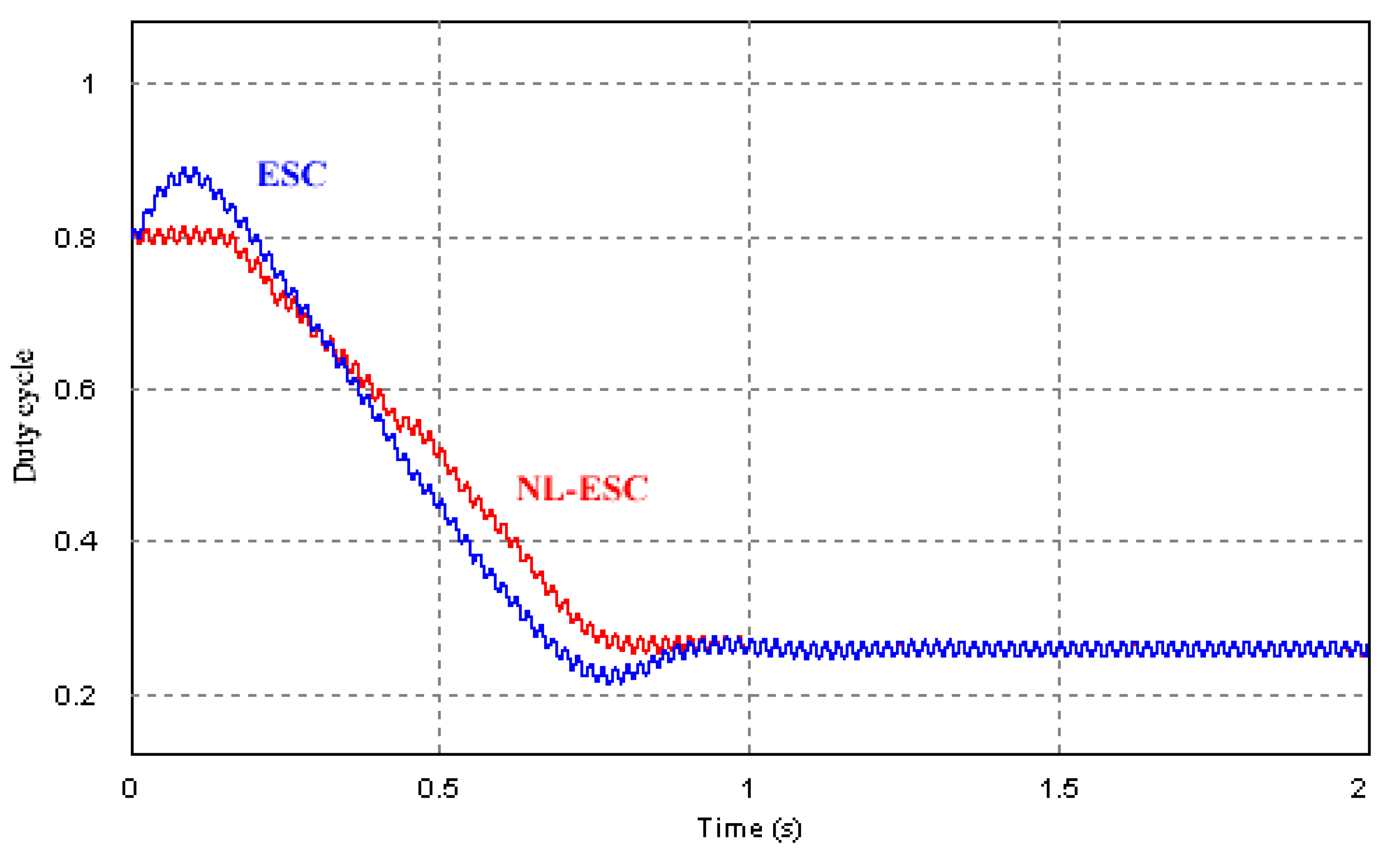
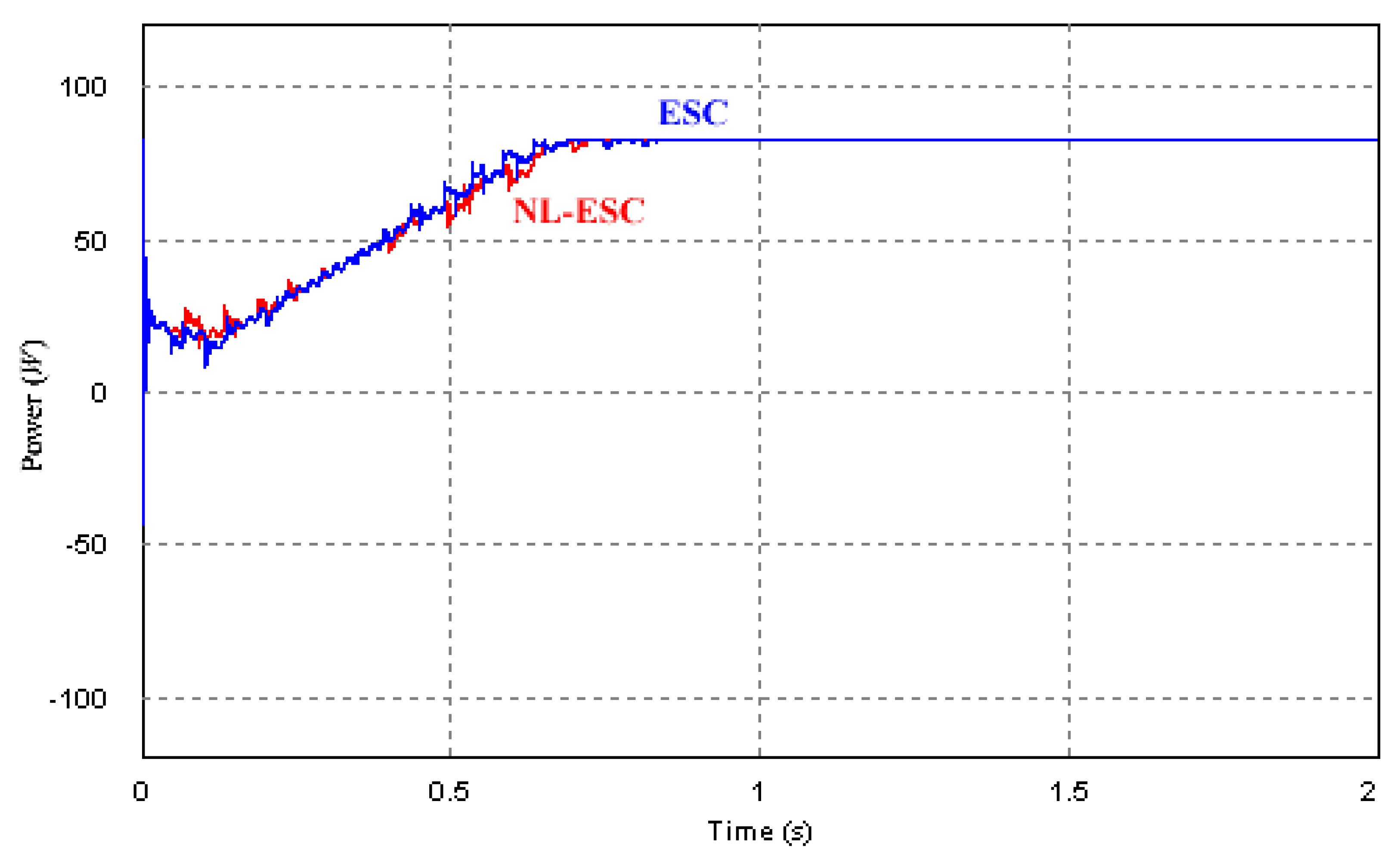
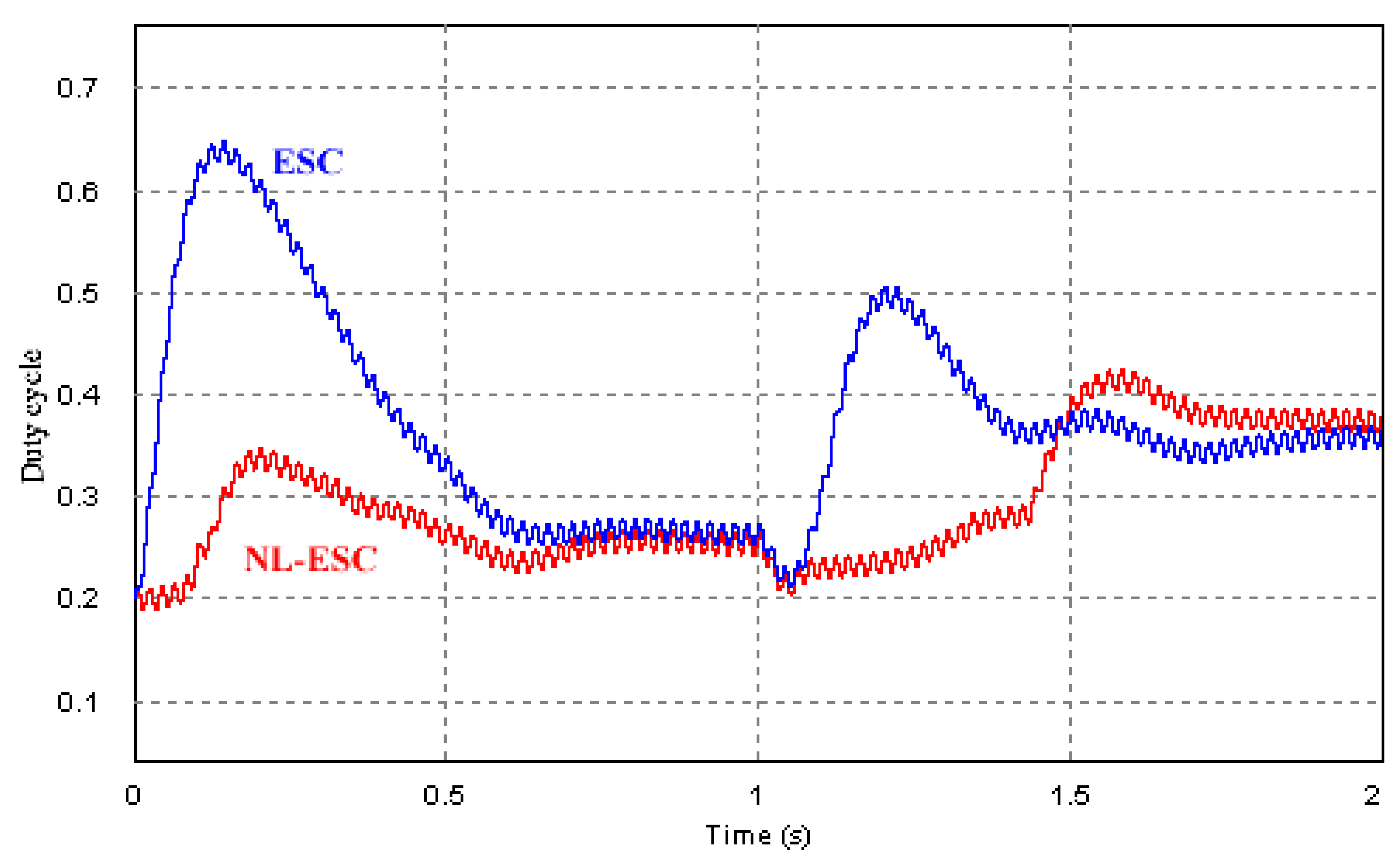
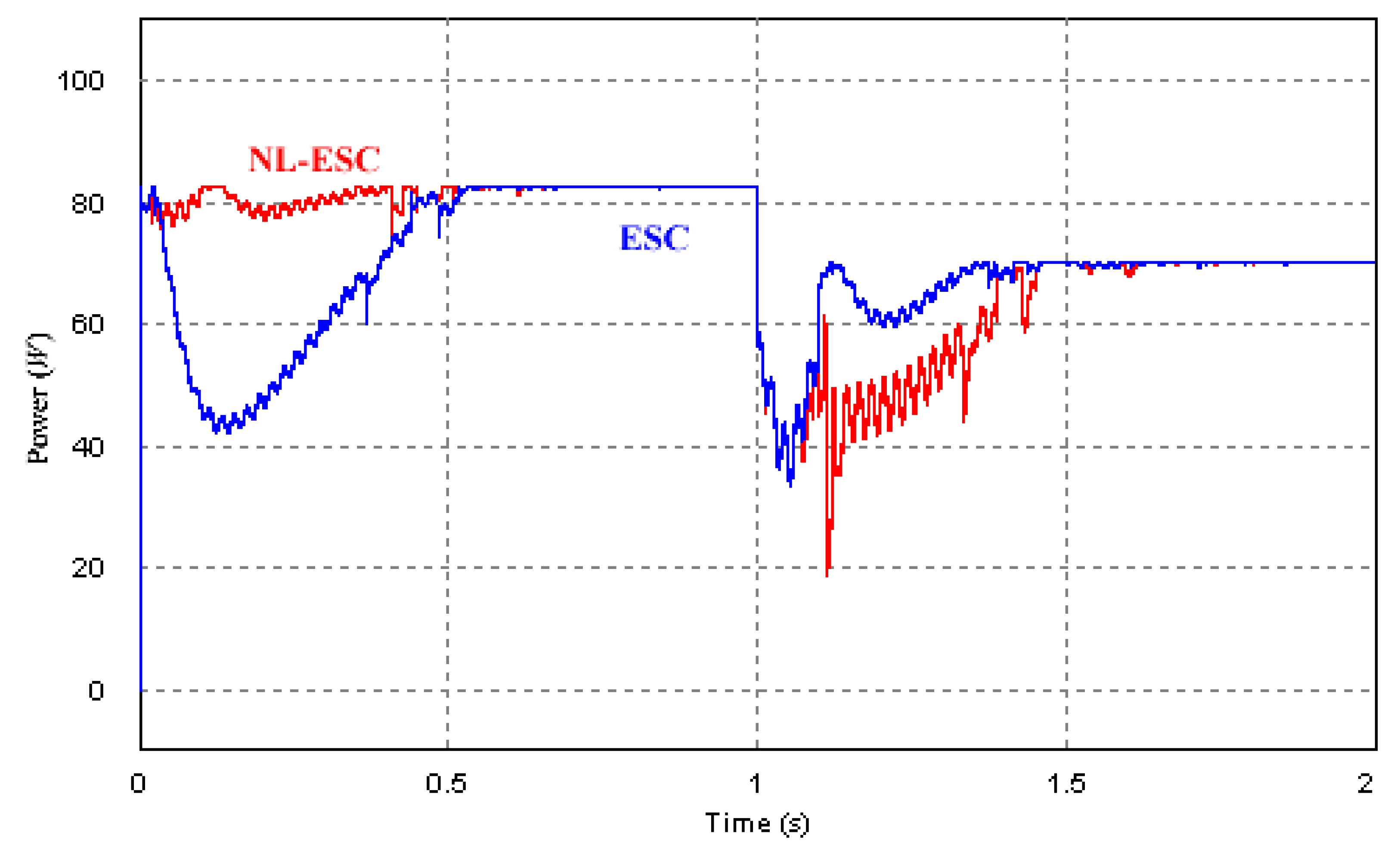
3.1. Transient Waveform Starting at Di = 0.8
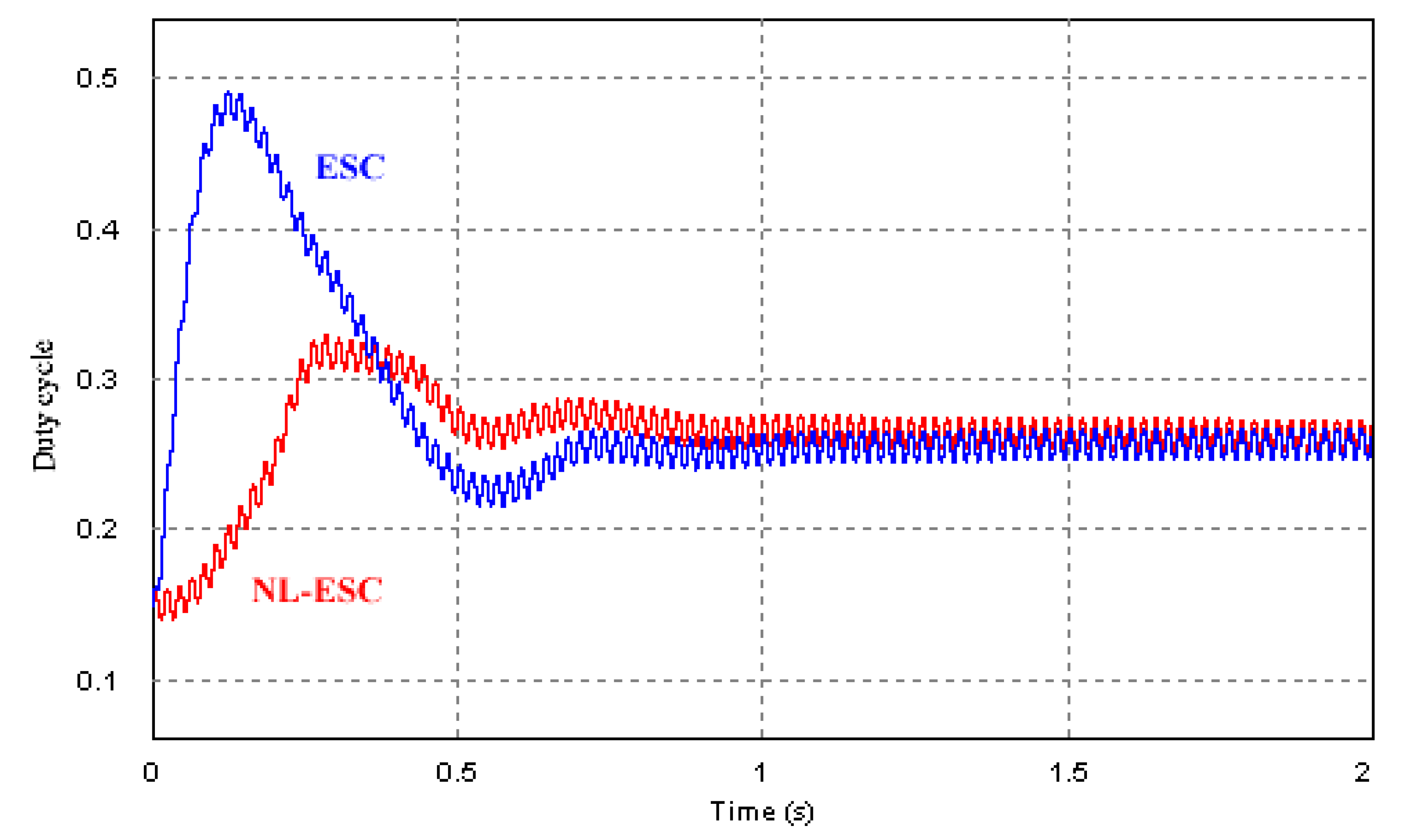
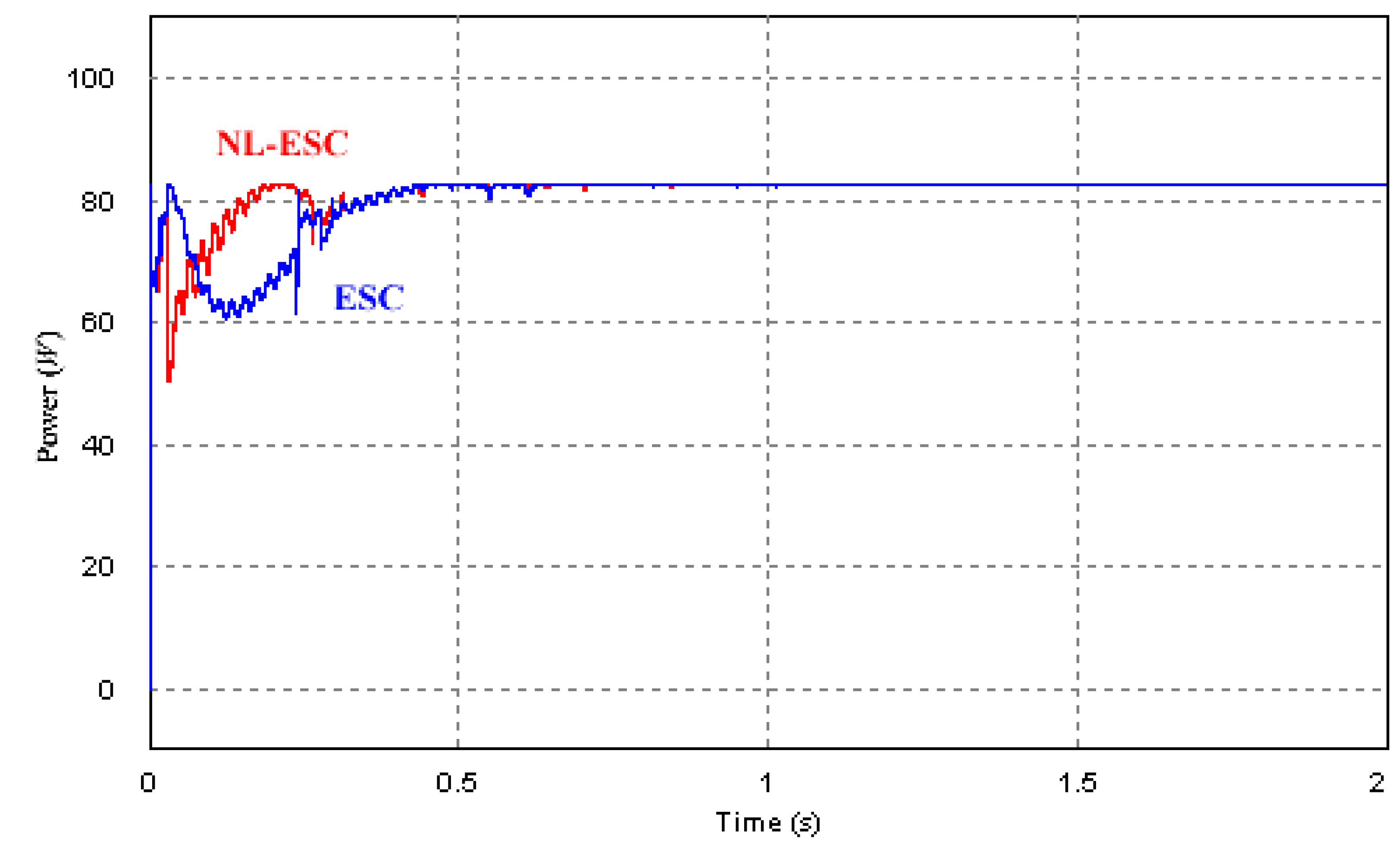
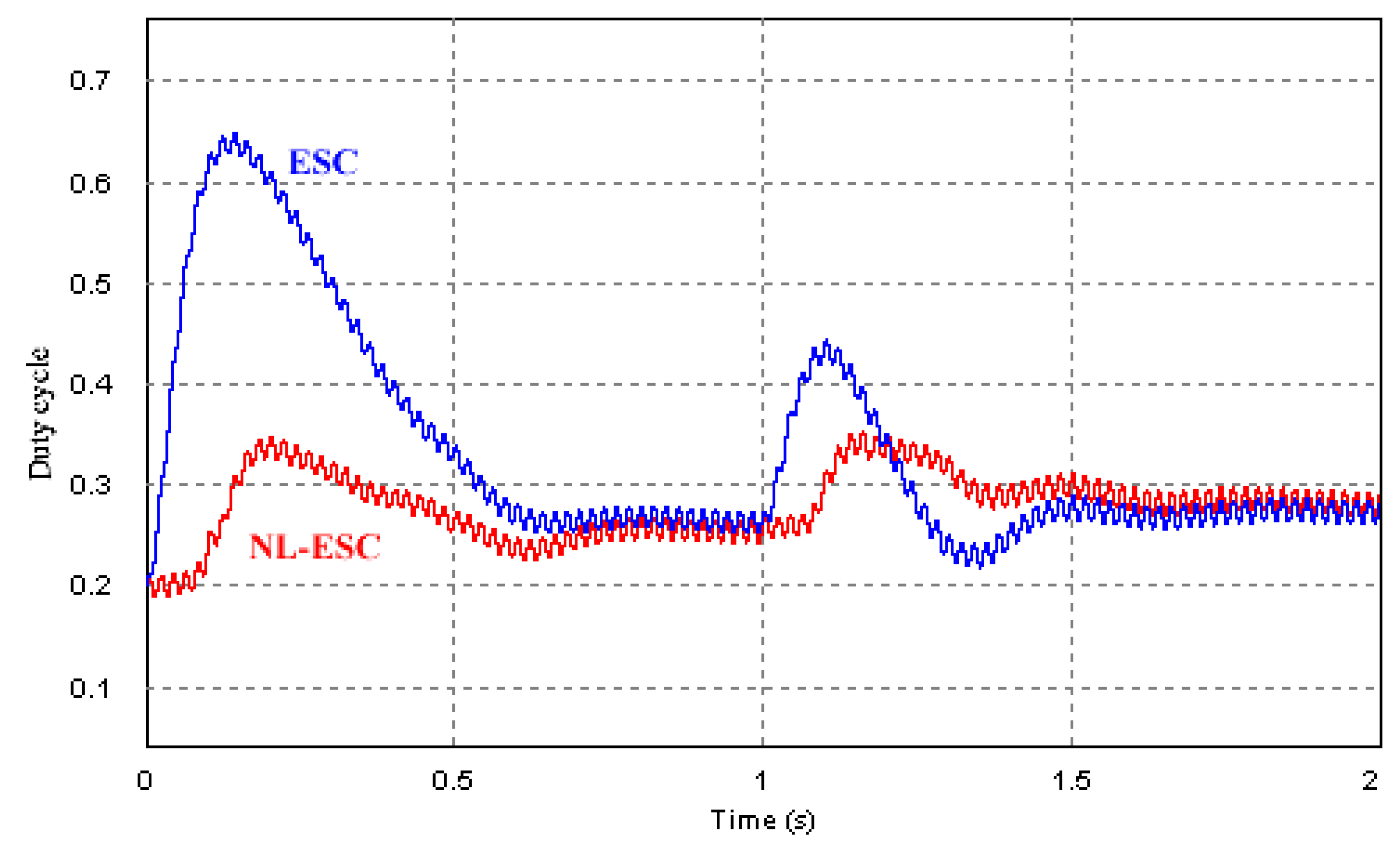
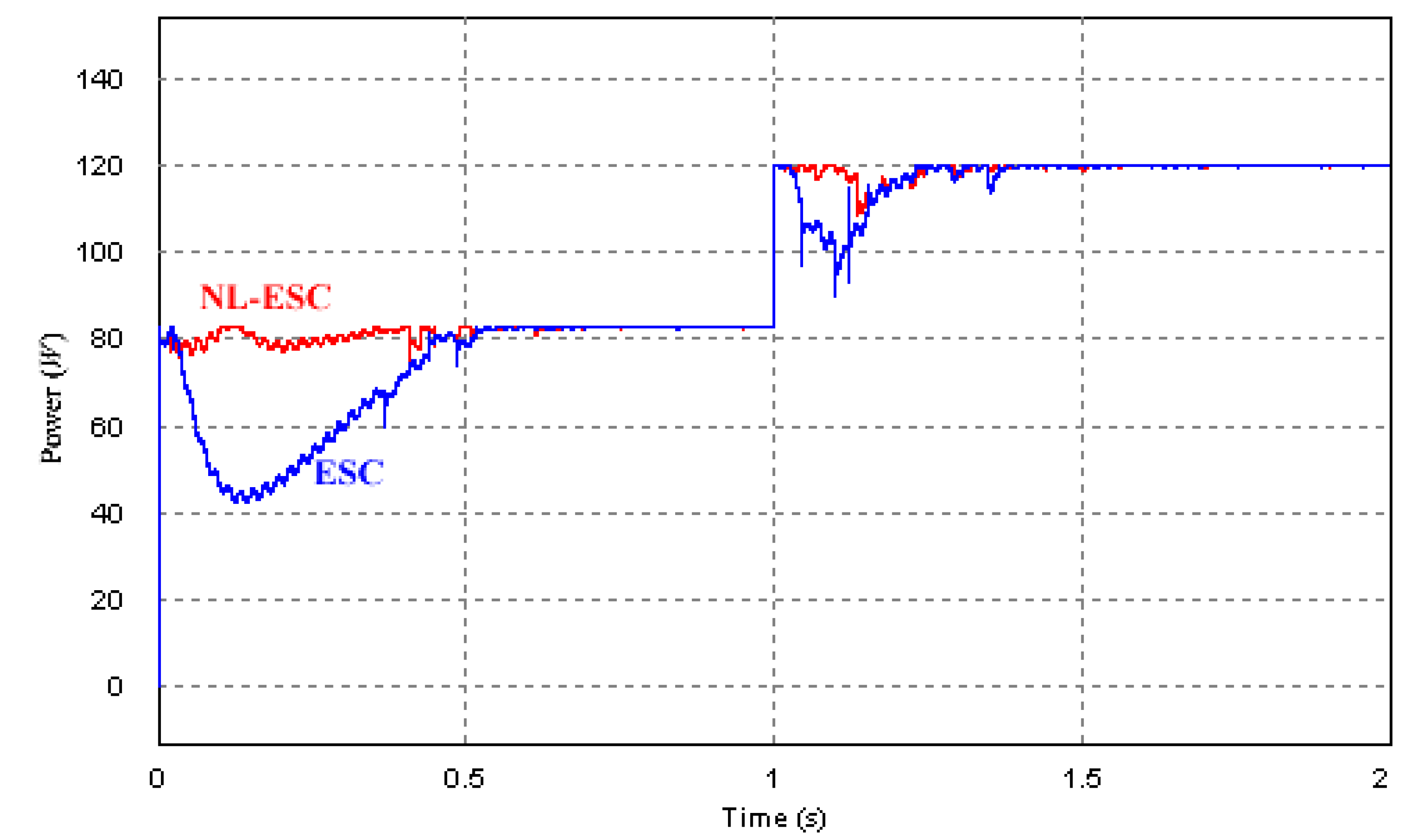
3.2. Transient Waveform Starting at Di = 0.15




3.3. Response of MPPT Approaches in Front of Weather Conditions Change






4. Conclusions
Acknowledgments
References
- Esram, T.; Chapman, P.L. Comparasion of photovoltaic array Maximum Power Point Tracking techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef]
- Yau, H.T.; Wu, C.H. Comparison of Extremum-Seeking Control techniques for Maximum Power Point Tracking in photovoltaic systems. Energies 2011, 4, 2180–2195. [Google Scholar] [CrossRef]
- Leyva, R.; Alonso, C.; Queinnec, I.; Cid-Pastor, A.; Lagrange, D.; Martinez-Salamero, L. MPPT of photovoltaic systems using Extremum Seeking Control. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 249–258. [Google Scholar] [CrossRef]
- Olalla, C.; Arteaga, M.I.; Leyva, R.; El Aroudi, A. Analysis and comparison of Extremum Seeking Control techniques. In Proceedings of the 2007 IEEE International Symposium on Industrial Electronics (ISIE 2007), Vigo, Spain, 4–7 June 2007; pp. 72–76.
- Brunton, S.L.; Rowley, C.W.; Kulkarni, S.R.; Clarkson, C. Maximum Power Point Tracking for photovoltaic optimization using ripple-based Extremum Seeking Control. IEEE Trans. Power Electron. 2010, 25, 2531–2540. [Google Scholar] [CrossRef]
- Bazzi, A.M.; Krein, P.T. Concerning “Maximum Power Point Tracking for photovoltaic optimization using ripple-based Extremum Seeking Control”. IEEE Trans. Power Electron. 2011, 26, 1611–1612. [Google Scholar] [CrossRef]
- Leyva, R.; Olalla Martinez, C.; Zazo, H.; Cabal, C.; Cid Pastor, A.; Queinnec, I.; Alonso, C. MPPT based on Sinusoidal Extremum Seeking Control in PV generation. Int. J. Photoenergy 2012, 2012, 672765:1–672765:7. [Google Scholar] [CrossRef]
- Jeong, H.G.; Seung, R.H.; Lee, K.B. An improved Maximum Power Point Tracking method for wind power systems. Energies 2012, 5, 1339–1354. [Google Scholar] [CrossRef]
- Zhu, Y.; Cheng, M.; Hua, W.; Wang, W. A novel Maximum Power Point Tracking control for permanent magnet direct drive wind energy conversion systems. Energies 2012, 5, 1398–1412. [Google Scholar] [CrossRef]
- Moase, W.H.; Manzie, C.; Brear, M.J. Newton-like extremum-seeking for the control of thermoacoustic instability. IEEE Trans. Autom. Control 2010, 55, 2094–2105. [Google Scholar] [CrossRef]
- Leyva, R.; Artillan, P.; Cabal, C.; Estibals, B.; Alonso, C. Dynamic performance of Maximum Power Point Tracking circuits using Sinusoidal Extremum Seeking Control for photovoltaic generation. Int. J. Electron. 2011, 94, 529–542. [Google Scholar] [CrossRef]
- Morosanov, I.S. Methods of Extremum Seeking Control. Autom. Remote Control 1957, 18, 1077–1092. [Google Scholar]
- Ariyur, K.B.; Krstic, M. Real-Time Optimization by Extremum-Seeking Control; Wiley-Interscience: New York, NY, USA, 2003. [Google Scholar]
- Latham, A.M.; Sullivan, C.R. Optimization of a continuous-time Maximum Power Point Tracking algorithm in the presence of noise. In Proceedings of the 12th IEEE Workshop on Control and Modeling for Power Electronics (COMPEL 2010), Boulder, CO, USA, 28–30 June 2010; pp. 1–7.
- Al-Atrash, H.; Batarseh, I.; Rustom, K. Effect of measurement noise and bias on Hill-Climbing MPPT Algorithms. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 745–760. [Google Scholar] [CrossRef]
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Zazo, H.; Del Castillo, E.; Reynaud, J.F.; Leyva, R. MPPT for Photovoltaic Modules via Newton-Like Extremum Seeking Control. Energies 2012, 5, 2652-2666. https://doi.org/10.3390/en5082652
Zazo H, Del Castillo E, Reynaud JF, Leyva R. MPPT for Photovoltaic Modules via Newton-Like Extremum Seeking Control. Energies. 2012; 5(8):2652-2666. https://doi.org/10.3390/en5082652
Chicago/Turabian StyleZazo, Héctor, Esteban Del Castillo, Jean François Reynaud, and Ramon Leyva. 2012. "MPPT for Photovoltaic Modules via Newton-Like Extremum Seeking Control" Energies 5, no. 8: 2652-2666. https://doi.org/10.3390/en5082652
APA StyleZazo, H., Del Castillo, E., Reynaud, J. F., & Leyva, R. (2012). MPPT for Photovoltaic Modules via Newton-Like Extremum Seeking Control. Energies, 5(8), 2652-2666. https://doi.org/10.3390/en5082652