3.1. Phase 1—WDOTph1: Reference Formulation for Wave Dragon Overtopping Model
Phase 1 was aimed at establishing a reference formulation of the overtopping model as an updated version of Equation (7), which would be specifically suited for the case of Wave Dragon and used as basis for further improvements of the model in the next phases of the investigation.
In order to do so, a setup including the main platform of Wave Dragon only was tested, fixed to a rigid rig in order to avoid any dynamic response to waves. Respect to the setup tested by Kofoed the only difference is therefore that here the real 3D geometry of the device was accounted for (
Figure 4). In the following this version of the model is referred to as the Wave Dragon overtopping formulation from phase 1 (WDOTph1).
Literature about overtopping over coastal defense structures considers the effect of the breaking parameter only for breaking conditions: here
Q increases with
ξ−1,0 until reaching a maximum in non-breaking conditions, when the dependency no longer holds [
5]. Due to the design of the ramp, wave breaking never occurs with Wave Dragon; nonetheless, the geometrical differences existing with respect to traditional coastal defense structures, especially with respect to the lower
R generally considered, allowed the effect of
Sp on
Q to be investigated here.
Table 2.
Summary of the four investigation phases, including: a description of the setup tested, the additional variables investigated and the range of values considered in the each sensitivity analysis, the correcting factor introduced in the model and the effect described. A qualitative analysis is carried out if no correcting factor is introduced; correcting factors for which no sensitivity analysis has been performed are fitting coefficients. Part of the research from Kofoed [
10] is also included as a phase 0.
Table 2.
Summary of the four investigation phases, including: a description of the setup tested, the additional variables investigated and the range of values considered in the each sensitivity analysis, the correcting factor introduced in the model and the effect described. A qualitative analysis is carried out if no correcting factor is introduced; correcting factors for which no sensitivity analysis has been performed are fitting coefficients. Part of the research from Kofoed [10] is also included as a phase 0.
| Phase # | Setup | Variables investigated (sensitivity analyses) | Range (full-scale) | Correcting factor introduced | Effect described |
|---|
| 0 | 2D slope with limited draft and low Rc, fixed | dr/d (-) | 0–1 | λdr(-) | Limited draft |
| low R(-) | 0–0.75 | λs(-) | Low Rc |
| 1 | Main platform only, fixed | Sp(-) | 0.011–0.039 | ξp(-) | Peak wave steepness |
| - | - | λwd, γwd | 3D WD geometry |
| s | 2, 10, 20 | - | Wave spreading through cos2s function |
| γ | 1, 3.3, 7 | - | Wave spectral shape through peak enhancement factor |
| 2 | Main platform + reflectors, all fixed | op (°) | 26.8, 33.6, 38.7 | ζop | Reflectors opening angle |
| drR (m) | (14–Rc), (13–Rc), (11.4–Rc) | ζdrR | Reflectors draft |
| - | - | a | Reflectors maximum wave amplifying effect |
| 3 | Main platform + reflectors, free floating as a rigid body | Surge, heave and pitch | Response to operational conditions, restrained by mooring line with k = 1260 kN/m | λφ | Pitch oscillation |
| 4 | Main platform fixed; reflectors connected to the platform through a ball joint allowing roll motion, free floating at the tip | Rigidity in the connection between main platform and reflectors | Three friction levels at the joint connection (qualitative) | ζst | Energy dissipated through the reflectors roll motion |
Figure 4.
Setups tested by (
a) Kofoed [
7]; and (
b) in the determination of WDOTph1.
Figure 4.
Setups tested by (
a) Kofoed [
7]; and (
b) in the determination of WDOTph1.
By including in the model formulation the peak breaking parameter
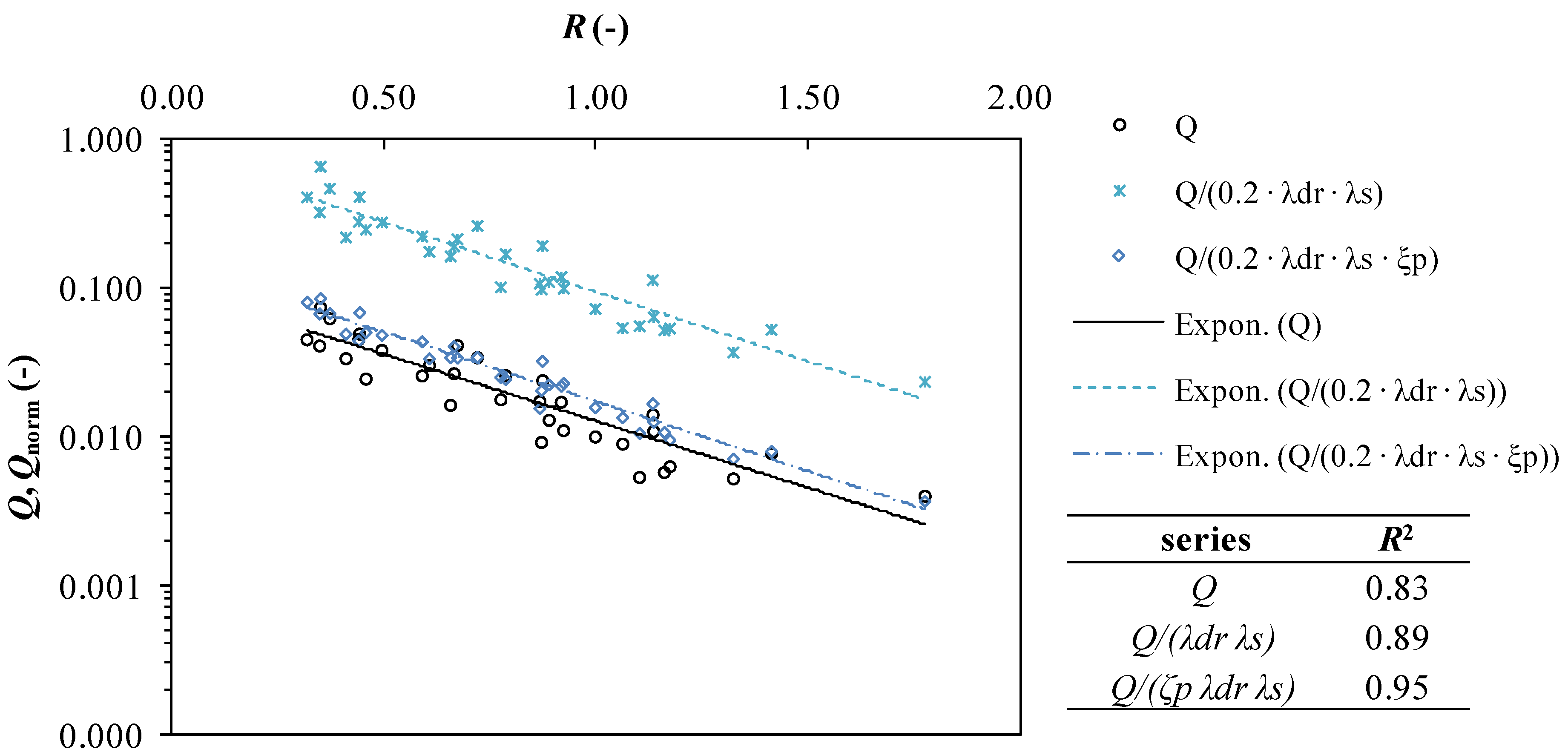
ξp a significant improvement could be achieved on the predictions quality. This can be assessed by considering the normalized response
Qnorm(-) =
Q/
A [
i.e., the product of all the offset-correcting factors of the exponential function Equation (5)] As can be seen in
Figure 5 the correlation coefficient of the predictions (
R2) increased as
Qnorm is considered, as in this case the right side of Equation (5) is more similar to a pure exponential function. This means that the overtopping process can be better described by taking the considered correcting factors into account. The improvement is more evident as
ξp is introduced among the offset-correcting factors.
Figure 5.
Increased precision showed through the R2 of the model as the offset-correcting factors are included. Measured Q are in black dots, normalized response from Equation (7) in light blue stars, normalized response from WDOTph1 (including ξp) in blue diamonds. Exponential trend-lines are shown for each dataset, y-axis in logarithmic unit
Figure 5.
Increased precision showed through the R2 of the model as the offset-correcting factors are included. Measured Q are in black dots, normalized response from Equation (7) in light blue stars, normalized response from WDOTph1 (including ξp) in blue diamonds. Exponential trend-lines are shown for each dataset, y-axis in logarithmic unit
The choice was made to keep the same fitting coefficient used in Equation (7). In this way, having already accounted for the effects of limited draft, low
Rc and
ξp through the introduced offset-correcting factors, the gap between measurements and predictions can be fully ascribed to geometrical differences between Wave Dragon and the setup previously tested by Kofoed (
Figure 4). A set of complementary fitting coefficients was therefore derived to fill this gap, describing the effect of the 3D Wave Dragon geometry on
Q:
λwd(-) = 0.1502 is an offset-correcting factor and
γwd(-) = 0.8275 is a gain-correcting factor.
The resulting WDOTph1 model formulation is therefore Equation (12). Here λdr and λs are still provided by Equations (9) and (10), with κ = 1:
All the correction factors introduced describe a physical process, depending either on the wave features or on the setup configuration. This extends the applicability of the model to any configuration within the range of tested conditions. Respect to Equation (7) the effects of Sp and of the 3D geometry are included. The latter is defined through complementary fitting coefficients which shall be determined on a case-by-case basis for any specific geometry, as done here for the case of Wave Dragon.
The effect of spectral shape and wave spreading were also qualitatively assessed in this phase through sensitivity analyses. The spectrum peak enhancement factor
γ was varied from the standard value of 3.3 (normally used for the North Sea), testing values of
γ = 1 and
γ = 7, representative respectively of fully developed seas (Pierson-Moskovitz spectrum) and narrow banded spectrum typical of very short fetch lengths. The spreading coefficient
s of the cos
2s spreading function was also varied from the standard value of
s = 20 (almost 2D waves), testing
s = 2 (highly 3D waves) and
s = 10 (mildly 3D waves). From the results it was concluded that the spectral shape has no influence on
Q, which instead increases as waves become long crested [
15].
3.2. Phase 2—WDOTph2: Effect of the Wing Reflectors
In phase 2 the effect of the reflectors has been investigated, resulting in the model formulation called WDOTph2. Respect to phase 1, the reflectors were included in the setup, rigidly fixed to the platform in order to avoid any relative motion (
Figure 6). Any difference between measurements and predictions from WDOTph1 model can be therefore ascribed exclusively to the effect of the reflectors.
Figure 6.
The model tested in phase 2. Both platform and reflectors were restrained from motions.
Figure 6.
The model tested in phase 2. Both platform and reflectors were restrained from motions.
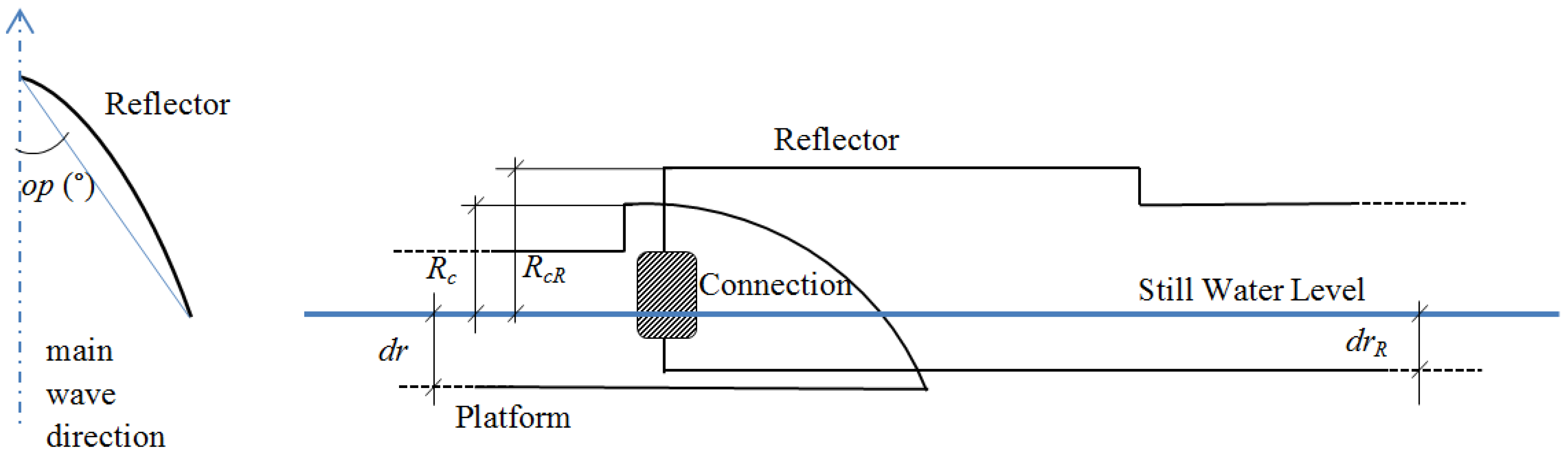
Their draft,
drR (m), and opening,
op (°), were varied throughout the study to assess their influence through a sensitivity analysis (
Figure 7). The opening of the reflectors is considered as the angle the main wave direction forms with the straight line between their tip and connection with the platform. Tested values have been referred to as
op0 = 33.6°,
op+1 = 38.7° and
op−1 = 28.6°.
drR has been progressively increased by lowering the reflectors connection with the platform. Values tested have been drR,0, drR,−1 and drR,−2, corresponding respectively to the freeboard of the reflector being 2 m higher, 1 m higher and 0.5 m lower than Rc at full scale.
Figure 7.
Sketch showing how reflectors features (op and drR) have been considered in phase 2.
Figure 7.
Sketch showing how reflectors features (op and drR) have been considered in phase 2.
A different approach than in phase 1 was used to update the model in phase 2. The rationale is that the reflectors act on the incoming wave field rather than modifying the overtopping itself. This effect is accounted for through a wave amplification model (WAM) to be used in the case reflectors are included in the setup; this provides an amplified significant wave height at the ramp,
Hm0' (m), which depends on the undisturbed
Hm0 and the reflectors setup:
here
a = 1.13 is a fitting coefficient representing the maximum wave amplification achievable, while
ζdr,R(-) and
ζop(-) are non-dimensional correcting parameters accounting for the effects of
drR and
op on the wave amplification, both ranging from 0 to 1.
ζdr,R is still provided by Equation (9) using
κ = 0.1 and
drR in place of
dr. The opening effect is accounted for through
ζop = cos (
op –
Kop), where
Kop (°) represents the optimal opening angle at which the wave amplification is maximum. By best fit
Kop = 40°, hence very close to
op+1 [
15].
With this approach the formal definition of Equation (12) can still be used as WDOTph2, but it shall be applied on the Hm0' provided by the WAM [Equation (13)]. To do so, all factors depending on Hm0 (hence Q, λs, ξp, R) have to be re-calculated from the formulations above based on Hm0'. To distinguish them from the original ones used in WDOTph1, they are also marked with a superscript:
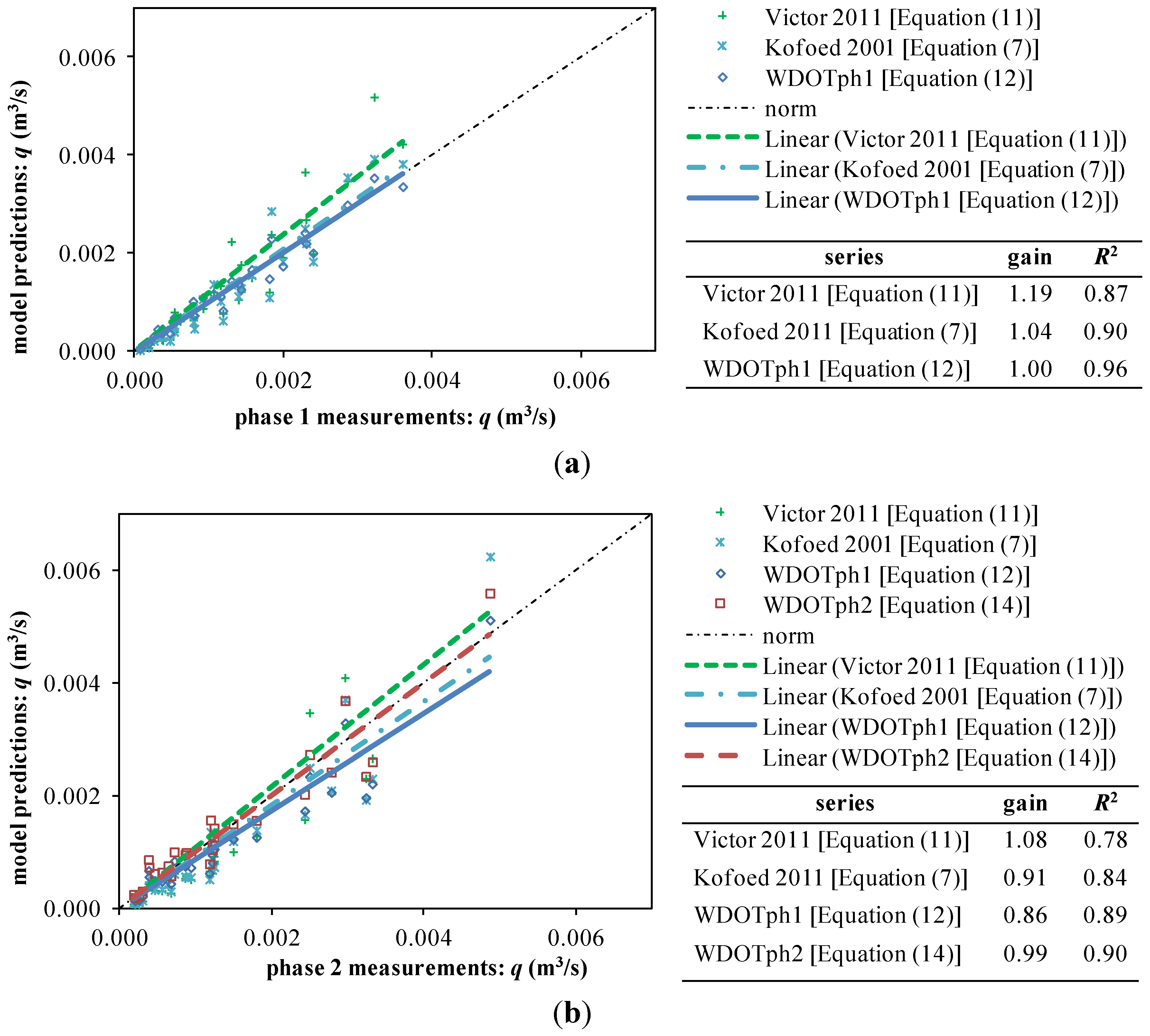
Model improvements from these first two phases can be seen in
Figure 8, where the
q (m
3/s) predicted from each model are plotted against the values of
q measured in the relative phase. WDOTph1 and WDOTph2 are shown, together with the three reference models described in
Section 1.2 for comparison. The gain of the linear trend-line indicates the model’s accuracy (
i.e., its ability to predict the measured data), while the correlation coefficient
R2 indicates the model’s precision (
i.e., its ability of reproducing the same results for the same input conditions). The overall quality of the model increases as these two values get closer to 1.
Figure 8.
Average overtopping discharge, q (m3/s): predictions from the models vs. measurements. Updated WDOT models as well as compared models from literature are shown. Models accuracies are measured by the gain of their linear trend-line (a target gain = 1 is shown as a black dash-dot line); their precisions by the trend-line R2 coefficients. (a) Quality of WDOTph1 and reference models, based on phase 1 measurements; and (b) quality of WDOT and reference models, based on phase 2 measurements.
Figure 8.
Average overtopping discharge, q (m3/s): predictions from the models vs. measurements. Updated WDOT models as well as compared models from literature are shown. Models accuracies are measured by the gain of their linear trend-line (a target gain = 1 is shown as a black dash-dot line); their precisions by the trend-line R2 coefficients. (a) Quality of WDOTph1 and reference models, based on phase 1 measurements; and (b) quality of WDOT and reference models, based on phase 2 measurements.
3.3. Phase 3—WDOTph3: Dynamic Response to Waves
In phase 3 the same setup used in phase 2 was tested, but it was left free to move as a rigid body (i.e., the relative motion between main platform and reflectors being still restrained). Direct comparison between measurements and WDOTph2 predictions allows accounting for the effect of Wave Dragon’s motions on its overtopping performance. drR was set equal to dr and op to the optimal value of 40°.
The model was moored to a vertical beam through a front line which stiffness was modeled through a piece of rubber line conveniently chosen; its stress-deformation curve was linear in the range of tensions tested and has previously been calibrated providing a stiffness coefficient of 470 N/m, corresponding to about 1260 kN/m at full-scale (
Figure 9).
Figure 9.
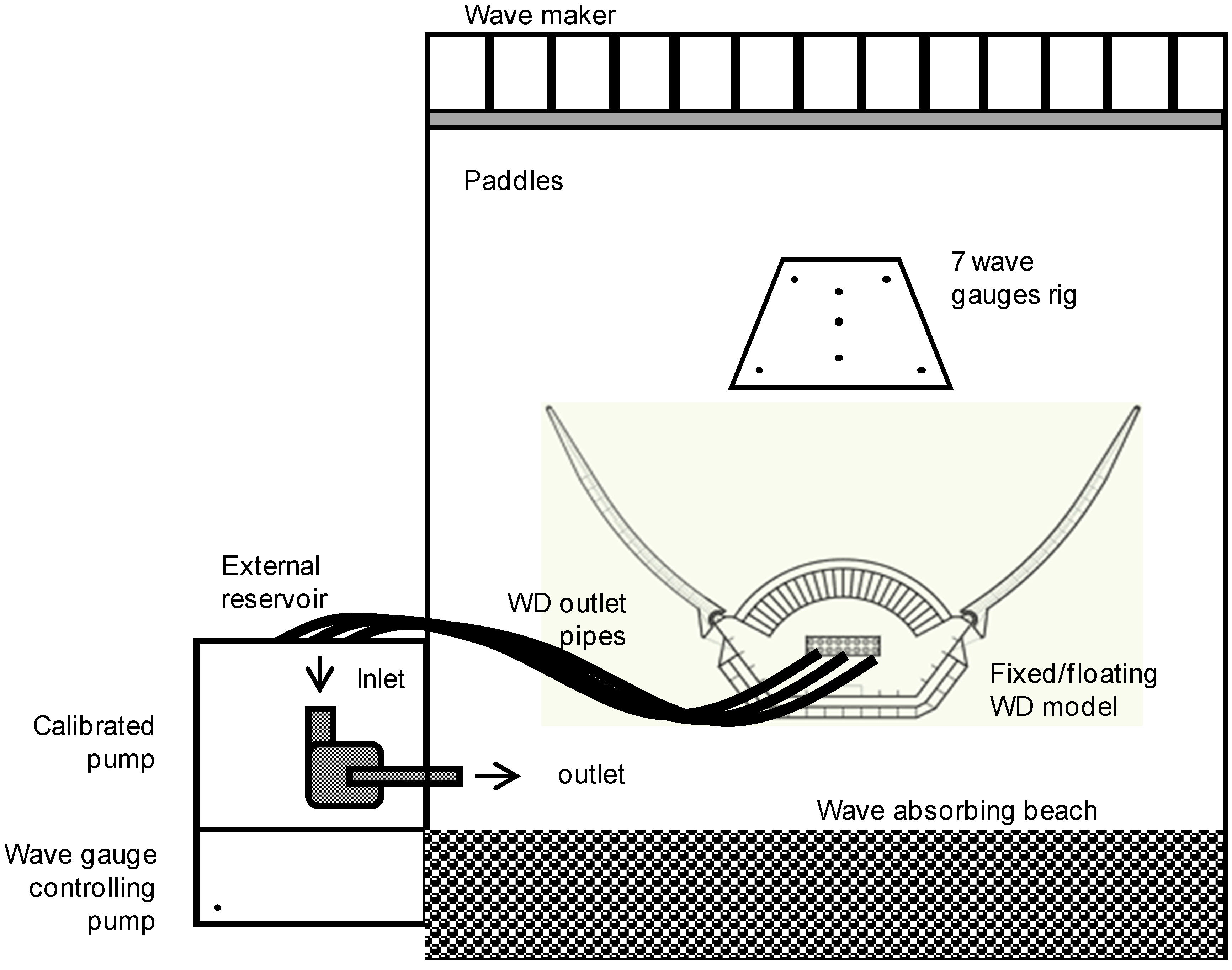
Phase 3 setup, the following is shown: wave maker on the left; fixed vertical beam used as anchoring point; mooring line (green) with spring modeling the required stiffness (brown box); wave gauges rig; potentiometer (POT) set used to measure the model displacements and Rc (blue arrows); Centre of Gravity (CoG) estimated position (black dot); outlet pipes leading overtopped water to the external reservoir.
Figure 9.
Phase 3 setup, the following is shown: wave maker on the left; fixed vertical beam used as anchoring point; mooring line (green) with spring modeling the required stiffness (brown box); wave gauges rig; potentiometer (POT) set used to measure the model displacements and Rc (blue arrows); Centre of Gravity (CoG) estimated position (black dot); outlet pipes leading overtopped water to the external reservoir.
Motions in pitch,
θ (°), heave,
Z (m), and surge,
X (m), were measured by a set of potentiometers; correlation between motions has been accounted for by knowing the position of the center of gravity, which was estimated to be at half the distance between the two vertical potentiometers POT2 and POT3, called dPOT (m), and at the same height as the horizontal potentiometer attachment to the platform, POT1 (
Figure 9). This also allowed correcting the target crest height,
Rc,t, according to the mean heave motion and pitch, so that the mean value of the instantaneous
Rc was considered in the following data analysis:
being
X0 (m) the horizontal distance between the attachment of POT1 and CoG, and
dRc (m) halfway the horizontal distance between the CoG and
Rc, measured at the centerline (
Figure 9). According to Equation (15) pitch is positive as the ramp lowers, heave upwards and surge in the wave direction.
The average response has been described by analyzing the motion signals in frequency domain, deriving the standard deviation
σ =
and mean frequency of oscillation from spectral analysis
ϕ0,2 = 2
π/
T0,2; the extreme response has been derived from time domain analysis as average of the 1/250 highest values,
i.e.,
θ1/250 for pitch. The choice is made to consider a full oscillation rather than the maxima as it better represents the motion of the device around a mean position, as both motions in the positive and negative direction affects
q. The following offset-correcting factors are therefore introduced:
where
ω0,2 (rad/s) = 2
π/
T0,2 is the wave mean angular frequency. Equations (16)–(18) express the fact that the correcting factors, hence
q, are reduced as much as the motion response of the device increases; this is expressed in a non-dimensional way, referred to features of the wave in the case of surge and heave, or to a maximum value recorded in the case of pitch. These factors are derived as a linear interpolation considering as boundary conditions the case of large response, for which the value of the correcting factor approaches 0 and
q decreases, and low response, for which the correcting factor approaches 1 and
q is not affected by the motion. In particular they express that:
q decreases as much as the surge mean frequency approaches the wave frequency, i.e., the device enter in resonance with waves; in this case the relative motion of the device respect to waves increases;
q decreases as much as the heave significant oscillation from spectral analysis 4 ∙ σZ approaches the significant wave height Hm0, when the relative motion of the device in waves also increases;
q decreases as much as the pitch significant oscillation 4 ∙ σθ increases; this is referred to a fixed value, the maximum extreme pitch oscillation in operational conditions recorded during the tests: max(θ1/250) = 8°. It shall be stressed here that λθ > 0 as the significant pitch oscillation will necessarily always be smaller than the maximum among the extreme values; as a proof of this, in phase 3 the range was 0.45 < λθ < 0.92.
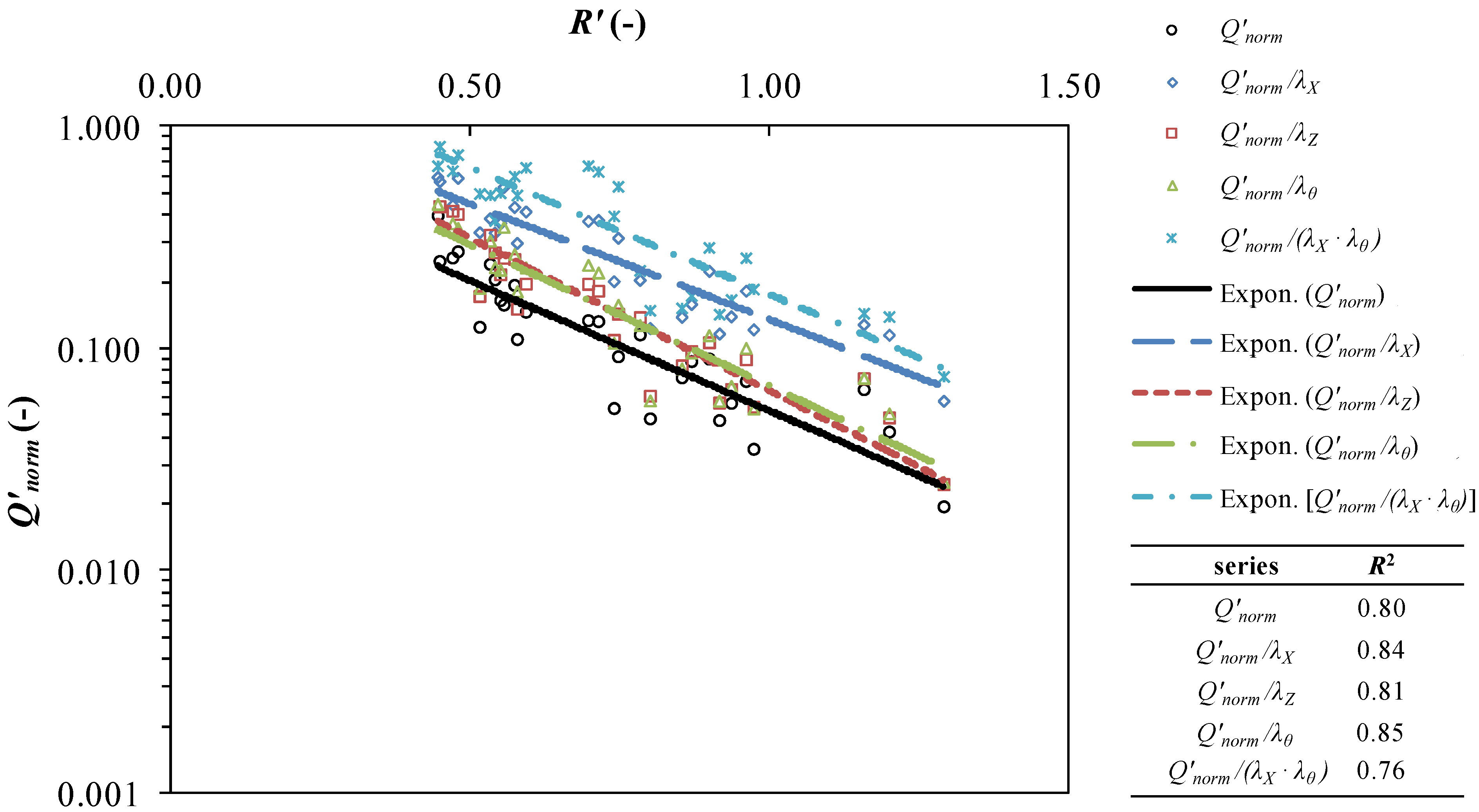
The data analysis technique used here has been similar as in phase 1, but built onto WDOTph2 results: the normalized response
Q'norm =
Q'/(0.2 ∙
λdr ∙
λs' ∙ ξp' ∙
λwd), where all parameters are based on the amplified
Hm0' as described in Equation (13), was considered to see if by introducing the new offset-correcting factors depending on the motions the
R2 would increase (
Figure 10).
As shown in
Figure 10 the introduction of both
λX and
λθ improved the model precision which on the other hand, decreases as both are considered at the same time. This can be explained by the fact that surge and pitch effects on
q are mostly correlated, as a larger
σθ occurs in correspondence to a larger surge response as discussed in
Section 4.3. The choice is made therefore to consider only
λθ in phase 3 model, as pitch is more easily measureable in practice and likely to be the main cause of
q reduction as it lowers the ability of the water stored to be effectively processed by the turbines or draft holes, increasing spill from the reservoir. As a result, the following formulation is provided for the WDOTph3 model:
Figure 10.
Increased precision showed through the R2 of the model as the offset-correcting factors accounting from the effects of the device motions are included. Values of Q'(-) and R'(-) refer to the amplified Hm0' due to the reflectors action, as from Equation (13). Exponential trend-lines are shown and relative R2 resumed in table. y-axis in logarithmic unit.
Figure 10.
Increased precision showed through the R2 of the model as the offset-correcting factors accounting from the effects of the device motions are included. Values of Q'(-) and R'(-) refer to the amplified Hm0' due to the reflectors action, as from Equation (13). Exponential trend-lines are shown and relative R2 resumed in table. y-axis in logarithmic unit.
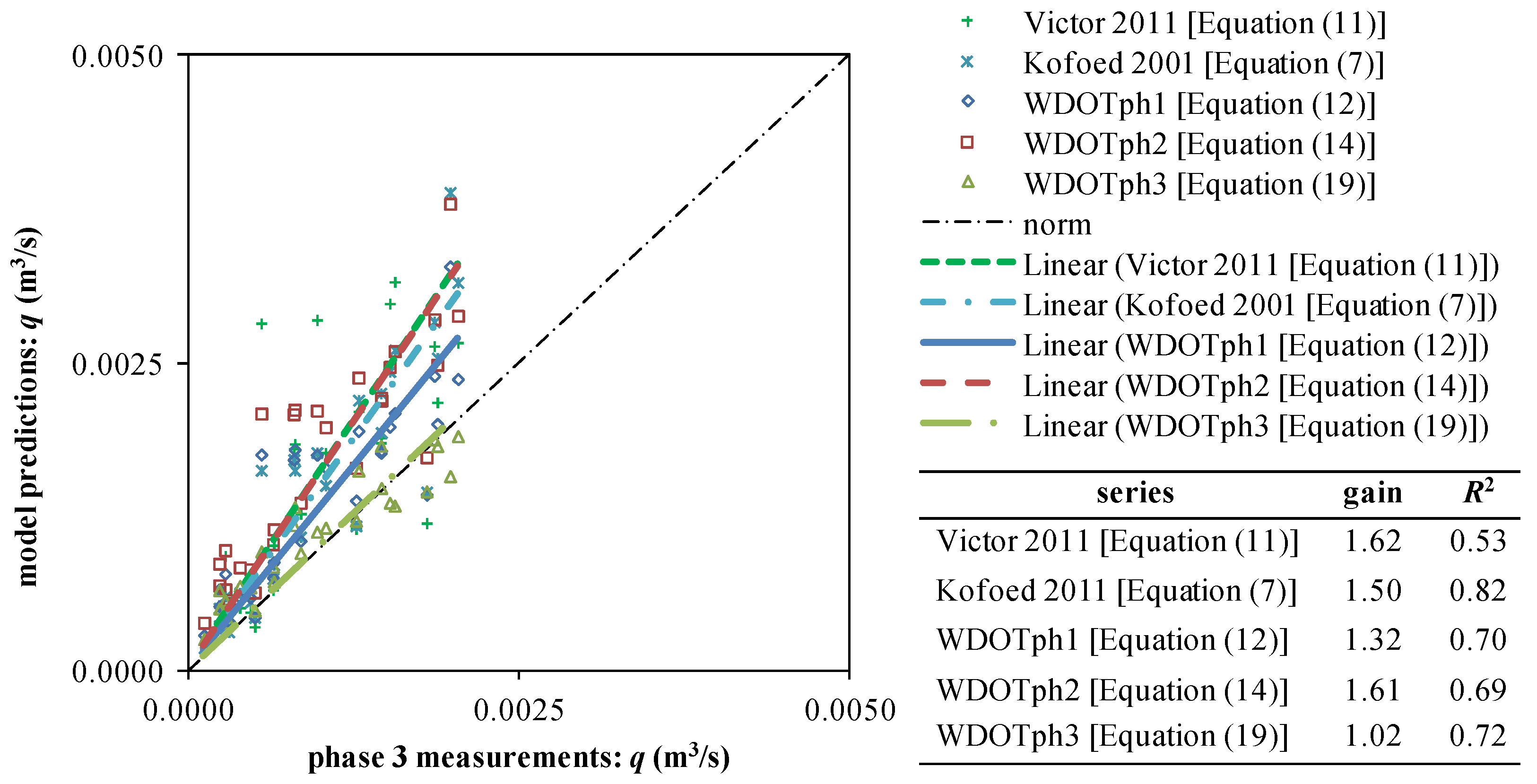
As done in previous phases, predictions of the model have been compared to measurements of phase 3, showing an improved accuracy respect to previous versions of WDOT as well as Equations (7) and (11); in general WDOTph3 also allows better precision, except when compared to Equation (7) which shows a 10% better
R2 (
Figure 11).
Figure 11.
Average overtopping discharge, q (m3/s): predictions from the models vs. measurements in phase 3. Updated WDOT models as well as compared models from literature are shown. Models accuracies are measured by the gain of their linear trend-line (a target gain = 1 is shown as a black dash-dot line); their precisions by the trend-line R2 coefficients.
Figure 11.
Average overtopping discharge, q (m3/s): predictions from the models vs. measurements in phase 3. Updated WDOT models as well as compared models from literature are shown. Models accuracies are measured by the gain of their linear trend-line (a target gain = 1 is shown as a black dash-dot line); their precisions by the trend-line R2 coefficients.
3.4. Phase 4—WDOTph4: Effect of Non-Rigid Connection between Reflectors and Platform
The last phase of the investigation considers the effect of the stiffness of the connection between the main platform and the reflectors. The connection is realized through a ball and socket joint allowing relative rotations but restraining relative translations. The inner mooring system limits the yaw excursion of the reflectors through a cable connecting them (
Figure 9), while pitch is naturally limited by their own buoyancy. Therefore the most evident motion is roll,
Φ (rad), which may decrease the wave amplification effect of the reflectors as it dissipates energy and generates transmitted waves on the lee side of Wave Dragon. The methodology followed in this phase is therefore to assess such a negative effect, to formulate a frame for describing it through an energy balance and then to take it into account in the WAM [Equation (13)] through a correcting factor.
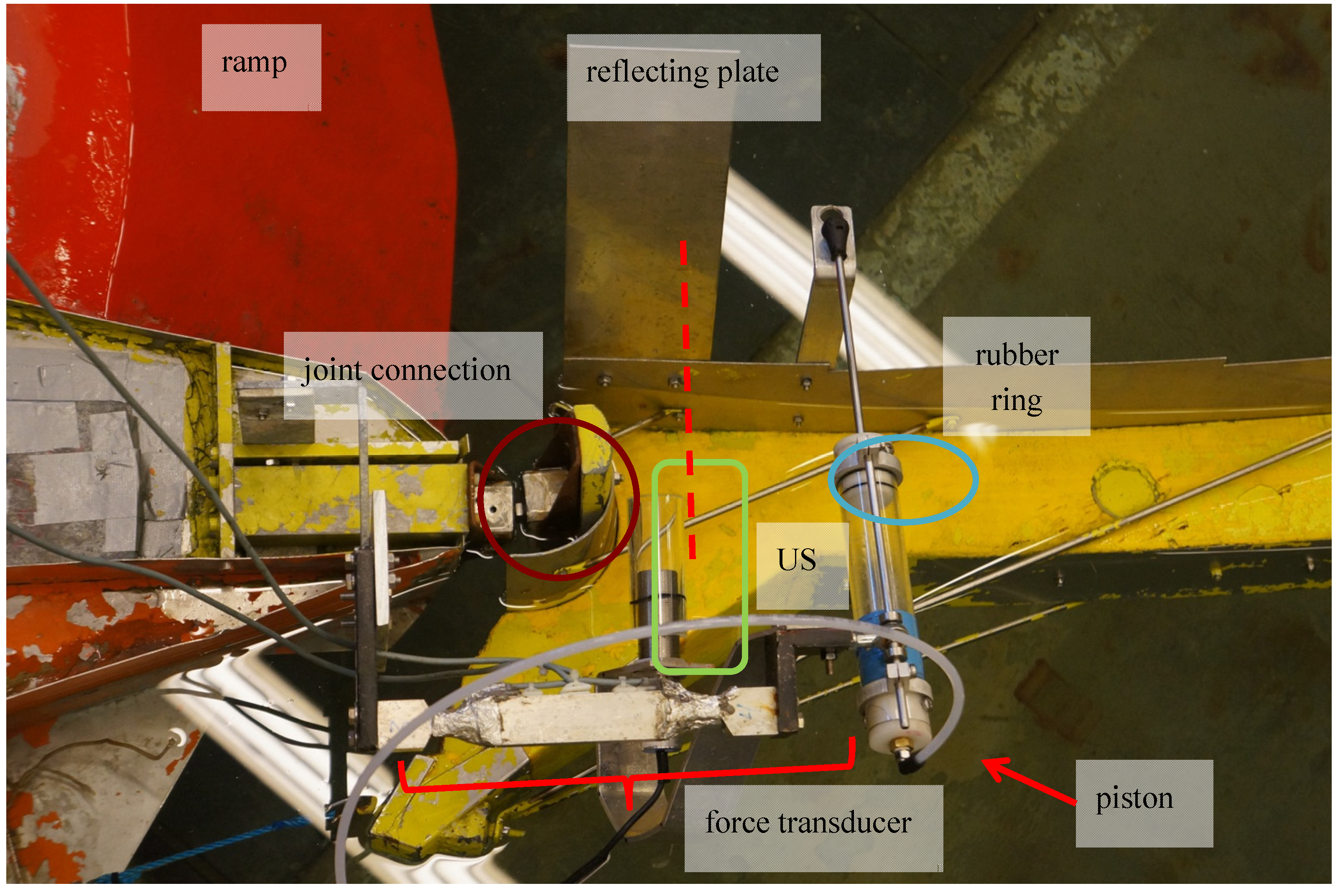
The setup used in this phase is similar to the one used in phase 2, with the main platform fixed, except that the reflectors are free to rotate at the joint connection and to move at the tip. The reflectors stiffness could be changed during the study by employing different rubber rings inside of the piston, which allowed varying its friction (
Figure 12). 3 different friction levels have been tested. However, the behavior on the two reflectors was not symmetrical and therefore their true stiffness had to be measured by recording the roll motion and torque. These signals have been analyzed identifying the mean of the 1/3 highest torque peaks in the outward direction (
i.e., towards the rear of Wave Dragon), called
M1/3 (N ∙ m), and the standard deviation of the roll oscillation,
σΦ (rad). The significant roll amplitude has been considered in the following analysis,
i.e., 2 ∙
σΦ, in order to account for the motions in both directions.
Figure 12.
Setup used to measure the reflectors stiffness st in phase 4 (detail of the right reflector). Highlighted are: connection with ball and socket joint (brown circle), force transducer, ultrasonic sensor (US, green circle) with reflecting plate used to measure the roll (on the left side a potentiometer was used instead), piston with rubber ring (blue circle) used to vary the stiffness.
Figure 12.
Setup used to measure the reflectors stiffness st in phase 4 (detail of the right reflector). Highlighted are: connection with ball and socket joint (brown circle), force transducer, ultrasonic sensor (US, green circle) with reflecting plate used to measure the roll (on the left side a potentiometer was used instead), piston with rubber ring (blue circle) used to vary the stiffness.
The reflectors stiffness could be calculated as st (N ∙ m /rad) = M1/3/(2 ∙ σΦ). Due to the lack of symmetry of the system however, the data analysis was rather referred to the energy dissipated by the roll motion of the reflectors, Ed (kJ) = M1/3 ∙ 2 ∙ σΦ, as in this case the contributions from left and right reflectors could be summed up.
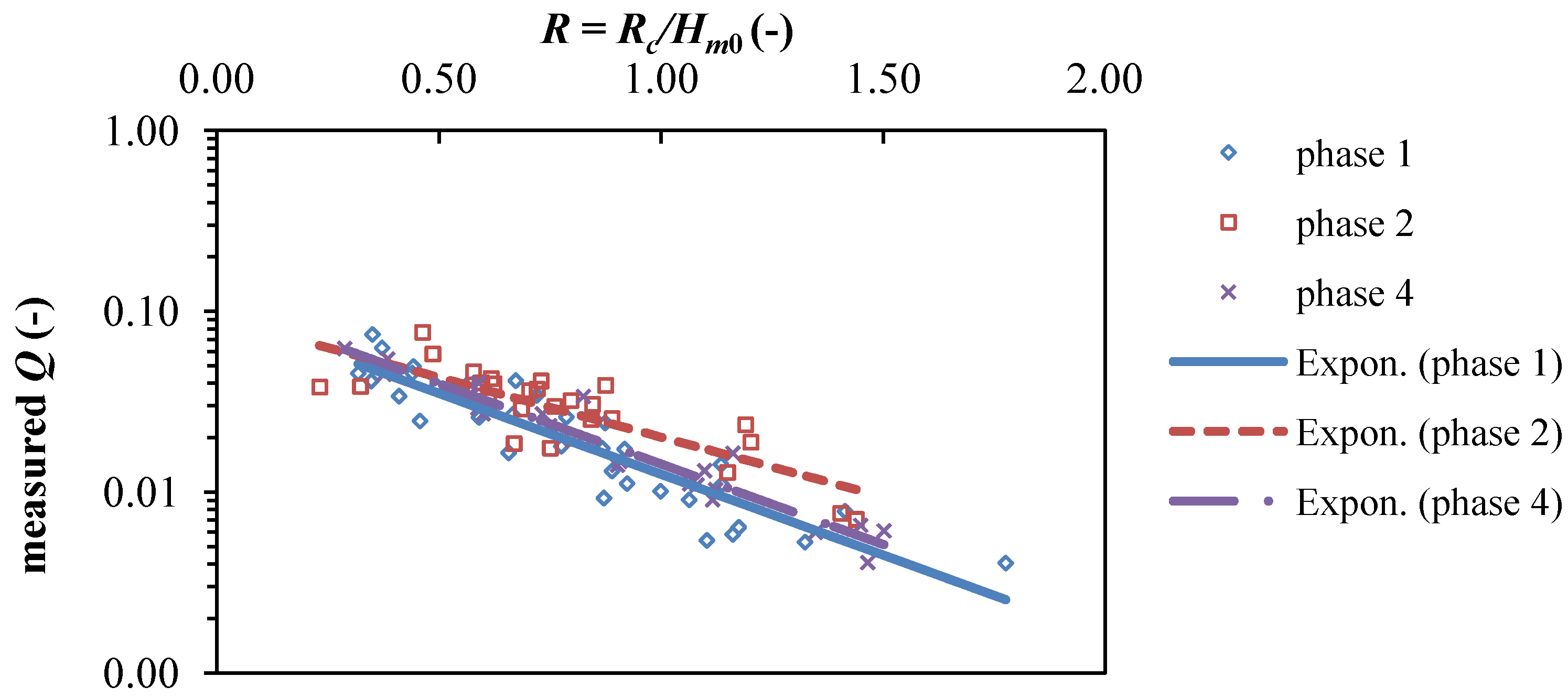
Referring to
R and
Q, data shown in
Figure 13 are independent on the reflectors features as they are both based on the undisturbed
Hm0; this allows comparing data from different phases, showing that measured
Q decreased from phase 2 to phase 4 and confirming the hypothesis made on the dissipative effect of the reflectors roll.
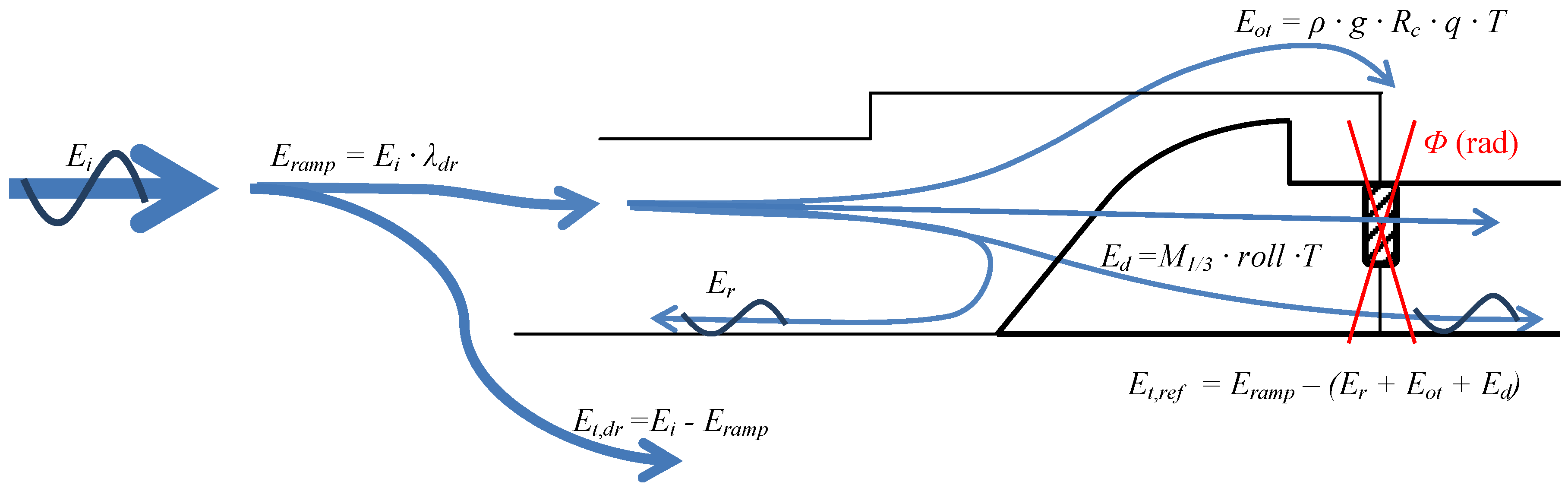
To better understand this effect, the energy balance of the system was performed (
Figure 14). Energy flows have all been considered in kJ, referring to the 30 minutes of test and to the full width of the Wave Dragon with the reflectors,
Wtot (m).
Figure 13.
Measured non-dimensional overtopping discharge, Q, as function of the non-dimensional crest level, R, in phase 1, 2 and 4. Values shown do not account for reflectors effect, neglecting the WAM and referring to measured q and undisturbed Hm0. y-axis in logarithmic unit.
Figure 13.
Measured non-dimensional overtopping discharge, Q, as function of the non-dimensional crest level, R, in phase 1, 2 and 4. Values shown do not account for reflectors effect, neglecting the WAM and referring to measured q and undisturbed Hm0. y-axis in logarithmic unit.
Figure 14.
Energy balance of the system in phase 4. All energy components considered are in kJ and referred to 30 min of tests (T) and full width of the model (Wtot = 4.6 m). Included are: incident wave energy Ei; reflected energy Er; energy transmitted below the ramp Et,dr; energy intercepted by the device Eramp; energy overtopped Eot; energy dissipated by the reflectors roll motion Ed; energy transmitted on the lee of the reflectors by roll-generated waves Et,ref. Ei, Er and Et,ref propagate in waves.
Figure 14.
Energy balance of the system in phase 4. All energy components considered are in kJ and referred to 30 min of tests (T) and full width of the model (Wtot = 4.6 m). Included are: incident wave energy Ei; reflected energy Er; energy transmitted below the ramp Et,dr; energy intercepted by the device Eramp; energy overtopped Eot; energy dissipated by the reflectors roll motion Ed; energy transmitted on the lee of the reflectors by roll-generated waves Et,ref. Ei, Er and Et,ref propagate in waves.
The incident wave energy,
Ei, as well as the reflected wave energy,
Er, have been derived from the 3D wave analysis performed on the wave recordings;
λdr has been used to evaluate the proportion of the incident energy intercepted by the device,
Eramp, the rest is transmitted below the draft,
Et,dr; the energy overtopping the ramp over the test duration is calculated from the measured
q and
Rc [see Equation (1)]; the energy dissipated by the reflectors roll motion,
Ed, is calculated as described above; the transmitted energy to the lee of the reflectors by the wave generated from their roll motion,
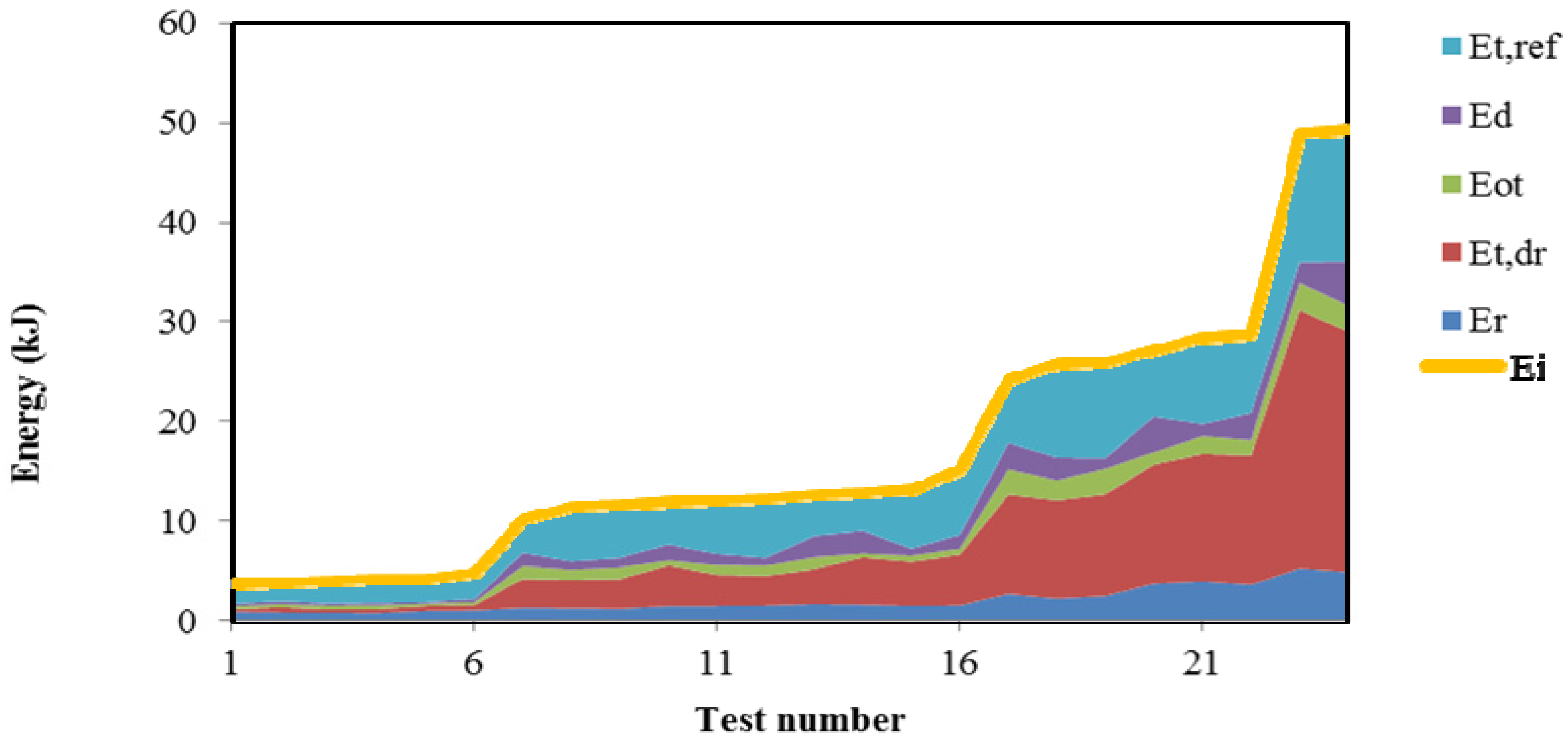
Et,ref, is the residual energy that complements the energy balance. The relative proportions of the energy flows are shown in
Figure 15.
Figure 15.
Relative proportion of the various energy components. On the x-axis are the different tests, sorted accordingly to Ei in ascending order.
Figure 15.
Relative proportion of the various energy components. On the x-axis are the different tests, sorted accordingly to Ei in ascending order.
Here it can be seen that as
Ei grows the proportion of energy that cannot be intercepted by the device due to its limited draft,
Et,dr, becomes larger, which also reduces the overtopping efficiency of the device. With regard to this, it must be stressed that here non-optimal conditions were tested (
i.e., non-rigid reflectors) as the purpose was not to assess the maximum overtopping achievable but the effect of unfavorable conditions. In optimal conditions the energy loss would be very much reduced and the corresponding term (
i.e.,
Ed +
Et,ref) would be partly added to
Eot. According to this—and in view of the design of a 1.5 MW North Sea demonstrator—the joint connection has been recently revised respect to the one considered here and tested by the authors [
16]. Moreover it shall be mentioned that at full-scale the turbines capacity to process the overtopping volumes would be larger, while in the tests the drainage may have been insufficient in some cases with large
Ei.
As for the consequence of the reflectors roll on the WAM, a correcting factor ζst(-) is introduced respect to Equation (13):
ζst shall work as weighting factor between two cases:
If the reflectors are rigidly fixed, as in phase 2, the energy lost in their roll motion Ed → 0; then Equation (13) is valid and ζst = 1;
If energy dissipation is maximum, Ed → Ed,max, then Hm0' ≈ Hm0 and ζst ≈ (a ∙ ζdrR ∙ ζop)−1.
In order to correctly represent this behavior, these two cases are interpolated through an atan function, which is able to represent the asymptotic behavior of ζst:
Considering all tested cases
Ed,max = 4.4 kJ, hence 5 kJ is a good approximation for operational conditions. Assuming a conservative value for
Ed,max respect to what is tested acknowledges the fact that, although
st was very low in some case, as expected the reflectors still had a wave amplifying effect (
Figure 13). The results are shown in
Figure 16, where
ζst and
Hm0/Hm0' are shown depending on
Ed. It can be seen that for growing
Ed the two tend to converge, meaning that
Hm0' tends to
Hm0 and the amplification effect of the reflectors disappear [Equation (21)]. On the other hand, as
Ed decreases (
i.e., reflectors become increasingly stiff),
ζst tends to 1 and Equation (21) becomes equal to Equation (13).
Figure 16.
ζst and Hm0/Hm0' depending on the dissipated energy, for Ed = 0 kJ and Ed,max = 5 kJ. ζst is defined as interpolating function between 1 for Ed = 0 and Hm0/Hm0' for Ed,max. Due to this, the two functions converge for Ed increasingly high, showing that reflectors loose efficiency.
Figure 16.
ζst and Hm0/Hm0' depending on the dissipated energy, for Ed = 0 kJ and Ed,max = 5 kJ. ζst is defined as interpolating function between 1 for Ed = 0 and Hm0/Hm0' for Ed,max. Due to this, the two functions converge for Ed increasingly high, showing that reflectors loose efficiency.
The resulting WDOTph4 model is shown in Equation (22). In order to distinguish it from WDOTph2, where the st effect is not included, a double superscript is used here meaning that all relevant parameters have been calculated based on Hm0":
3.4.1. Problems with WDOTph4 Representation
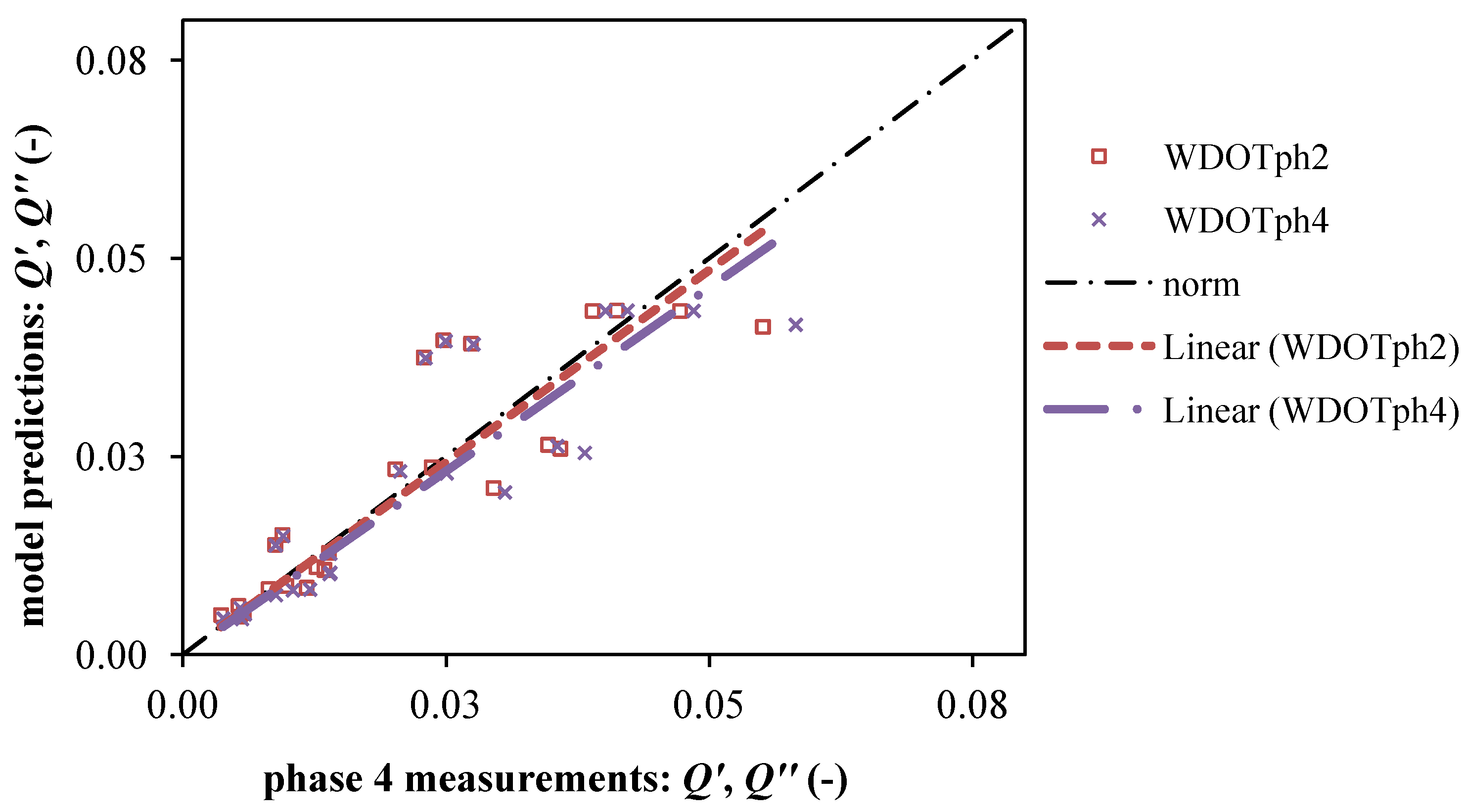
According to the assumptions made above, WDOTph2 predictions shall overestimate phase 4 measurements, as they do not account for the dissipation of energy caused by the reflectors’ motion. As shown in
Figure 17 this does not happen, as WDOTph2 predictions are actually quite accurate in predicting phase 4 measurements, with a gain of 0.97. As a consequence, due to its construction, WDOTph4 underestimate phase 4 measurements.
The reason could be that some of the offset-correcting factors used in WDOTph2 are also influenced by the reflectors roll in such a way that they determine a reduction of the model predictions comparable to the decrease in the measured Q'. In this case WDOTph2 would already be accounting for the dissipative effect of the reflectors roll indirectly.
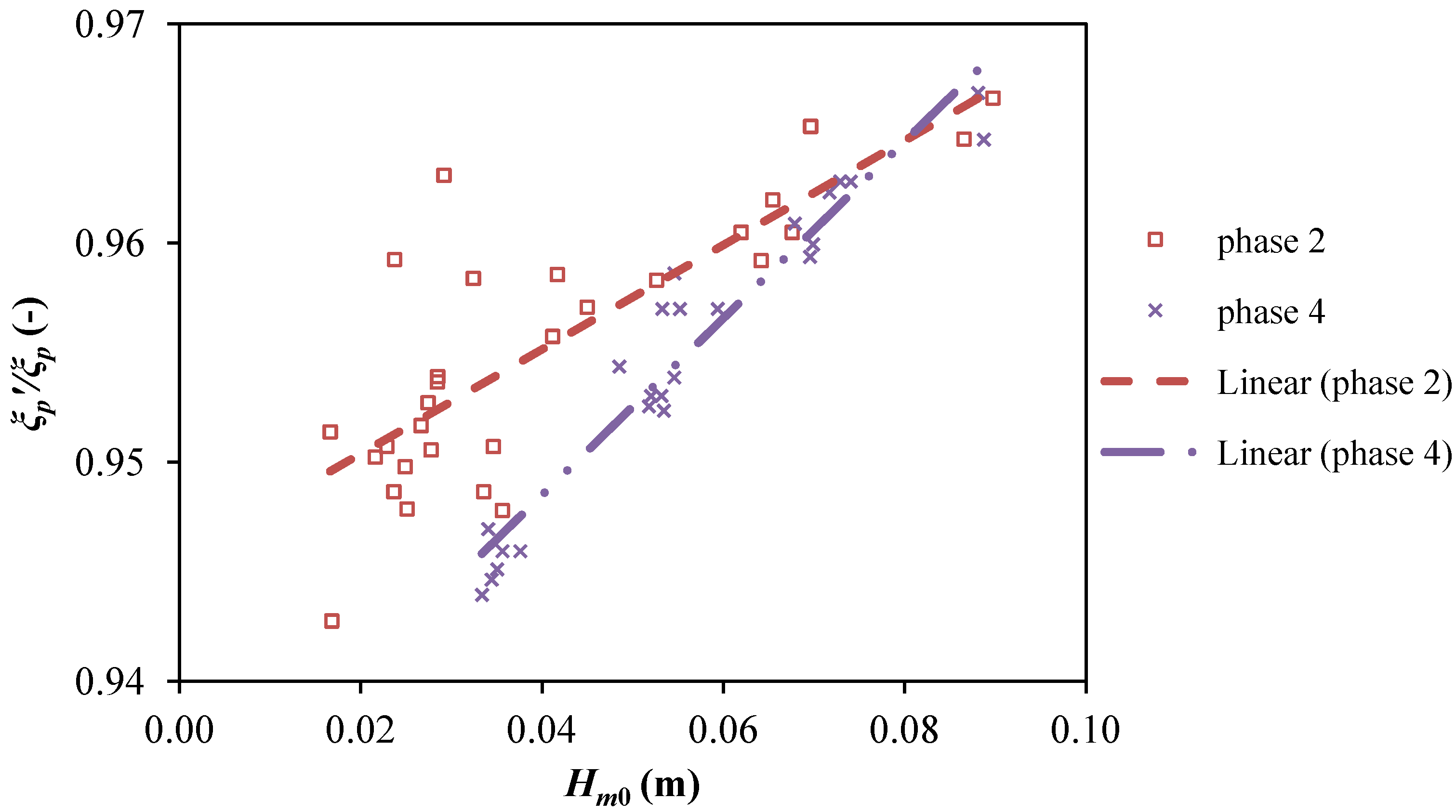
Figure 18 shows that the effect of the reflectors in reducing the breaking parameter from
ξp to
ξp' is more evident in phase 4 than in phase 2. Due to this, as WDOTph2 is applied on data from phase 4 it predicts lower
Q' than for phase 2. This is congruent to the hypothesis made above: the effect of reflectors roll may already be accounted for in WDOTph2 model through the lower
ξp', making the use of
ζst redundant.
Figure 17.
Average overtopping discharge, q (m3/s): predictions from the models vs. measurements in phase 4. Updated WDOTph2 and WDOTph4 models are shown. Models accuracies are measured by the gain of their linear trend-line (a target gain = 1 is shown as a black dash-dot line); their precisions by the trend-line R2 coefficients.
Figure 17.
Average overtopping discharge, q (m3/s): predictions from the models vs. measurements in phase 4. Updated WDOTph2 and WDOTph4 models are shown. Models accuracies are measured by the gain of their linear trend-line (a target gain = 1 is shown as a black dash-dot line); their precisions by the trend-line R2 coefficients.
Figure 18.
Effect of wing reflectors in decreasing ξp, measured in the cases of phase 2 and phase 4.
Figure 18.
Effect of wing reflectors in decreasing ξp, measured in the cases of phase 2 and phase 4.
It can also be noted that the energy balance of phase 2 requires the existence of a residual energy term too,
Eresidual =
Eramp – (
Er +
Eot). This is comparable in magnitude to the energy lost in phase 4 through the reflectors roll,
Ed +
Et,ref, but cannot be ascribed to it (
Figure 19). This poses the question whether it may be correct having considered in phase 4 all such residual energy as lost (see
Figure 14 and
Figure 15). Overall, in the case reflectors are not rigidly fixed a deeper analysis of the energy flows and wave field in front of the ramp shall be performed before including this effect in the overtopping model.
Figure 19.
Residual energy from energy balance in phases 2 and 4, the latter having been referred to as energy lost in the reflectors motion.
Figure 19.
Residual energy from energy balance in phases 2 and 4, the latter having been referred to as energy lost in the reflectors motion.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















