A New State of Charge Estimation Method for LiFePO4 Battery Packs Used in Robots


Abstract
:1. Introduction
2. Equivalent Coulombic Efficiency (ECE)
2.1. Calculation of the Equivalent Coulombic Efficiency

- (1)
- Discharge at the C/3 rate until the terminal voltage limit is reached;
- (2)
- Charge at the C/3 rate until SOC = 1 and the charging capacity is QCB;
- (3)
- Rest the battery pack for 5 min until it is in the balanced state;
- (4)
- Discharge at the C/3 rate until the terminal voltage limit is reached. The discharging capacity is QDB.
- (1)
- Discharge at the C/3 rate until terminal voltage limit is reached;
- (2)
- Charge at several different currents IC (C/3, C/2, 1C, 1.5C, 2C, 2.5C) until SOC = 1. The charging capacity is QCC = IC · tCC, where tCC is the charging time. This step will keep the current constant at different values in different charge cycles. Therefore, we finally have six charge cycles;
- (3)
- Rest the battery pack for 5 minutes until it is in a balanced state;
- (4)
- Discharge at the C/3 rate until the terminal voltage limit is reached. The discharging capacity is QDC = (C/3) · tDC, where tDC is the discharging time.
- (1)
- Discharge at a specific current until the terminal voltage limit is reached;
- (2)
- Charge at the C/3 rate until SOC = 1. The discharging capacity is QCD = (C/3) · tCD, where tCD is the charging time;
- (3)
- Rest the battery pack for 5 minutes until it is in a steady state;
- (4)
- Discharge at several different currents ID (C/3, C/2, 1C, 1.5C, 2C, 2.5C) until the terminal voltage limit is reached. The discharging capacity is QDD = ID · tDD, where tDD is the discharging time. This step will keep the current constant at different values in different discharge cycles. Therefore, we finally have six discharge cycles.

2.2. Modified ECE Method


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Temperature (°C) | KT |
|---|---|
| –10 | 0.8154 |
| 0 | 0.9134 |
| 25 | 1 |
| 45 | 1.0107 |
3. Battery Modeling
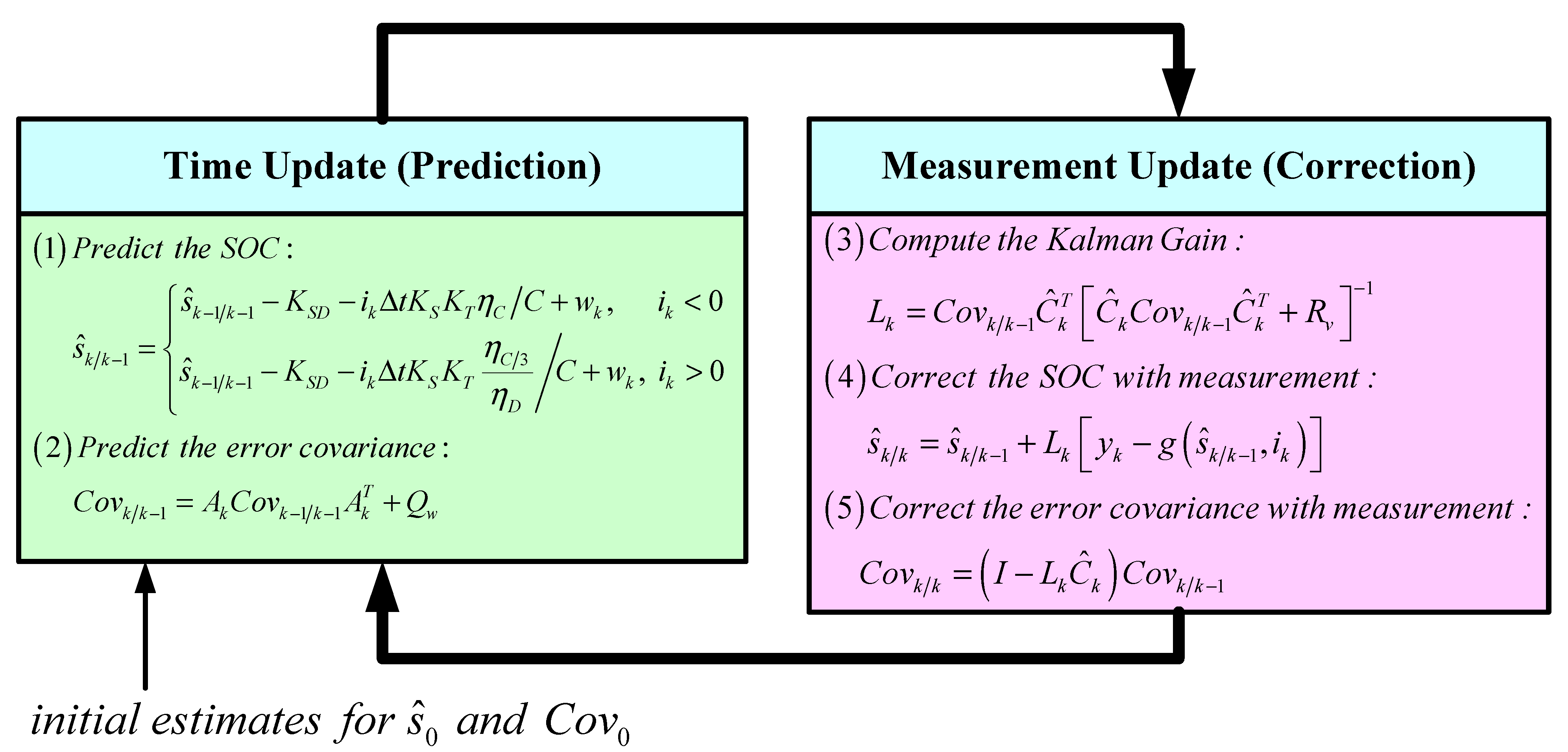
4. EKF Algorithm Based on the Battery Model
- (1)
- Given an initial SOC estimate , initial covariance matrix Cov0 and noise parameters;
- (2)
- After sampling the terminal voltage yk and current ik of the battery packs for sampling time k = 1, 2, 3…, the calculation processes are iterated as follows:
- (3)
- The prediction and correction processes repeat for every time step until the initial SOC estimation has converged to its real value.

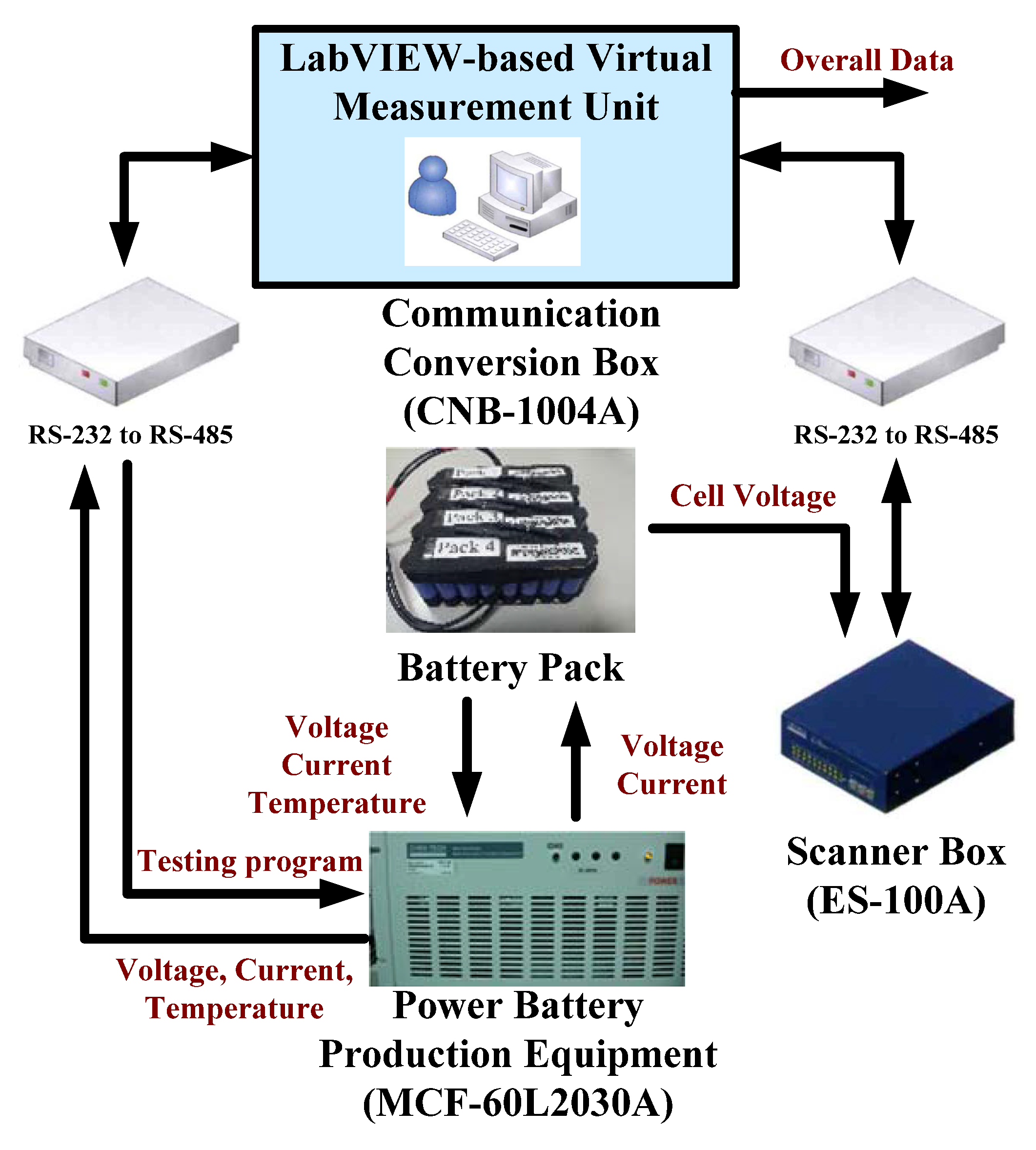
5. Experimental Results
5.1. Battery Test Bench

| Temperature (°C) | Experiment I | Experiment II | |
|---|---|---|---|
| Discharge | Charge | ||
| The test begins | 26.44 | 26.41 | 24.8 |
| The test ends | 23.2 | 21.91 | 24.6 |
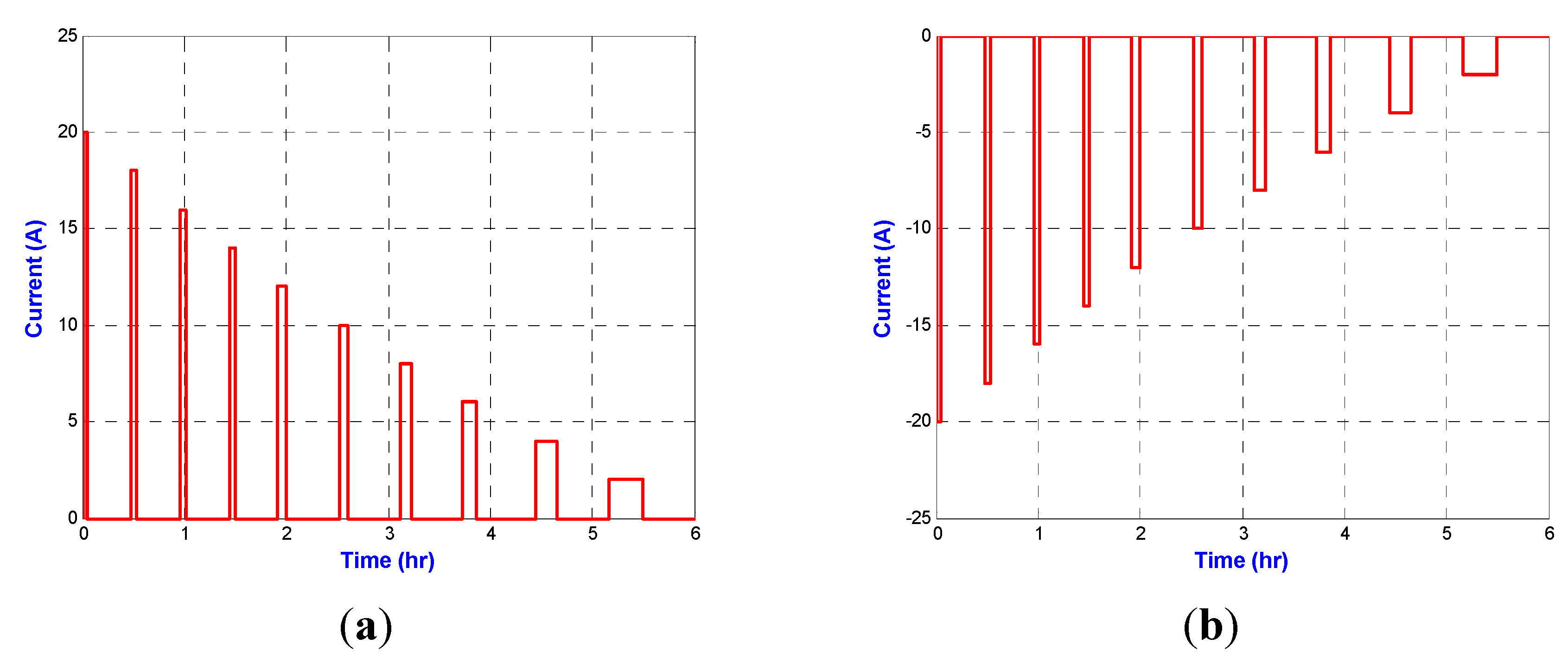
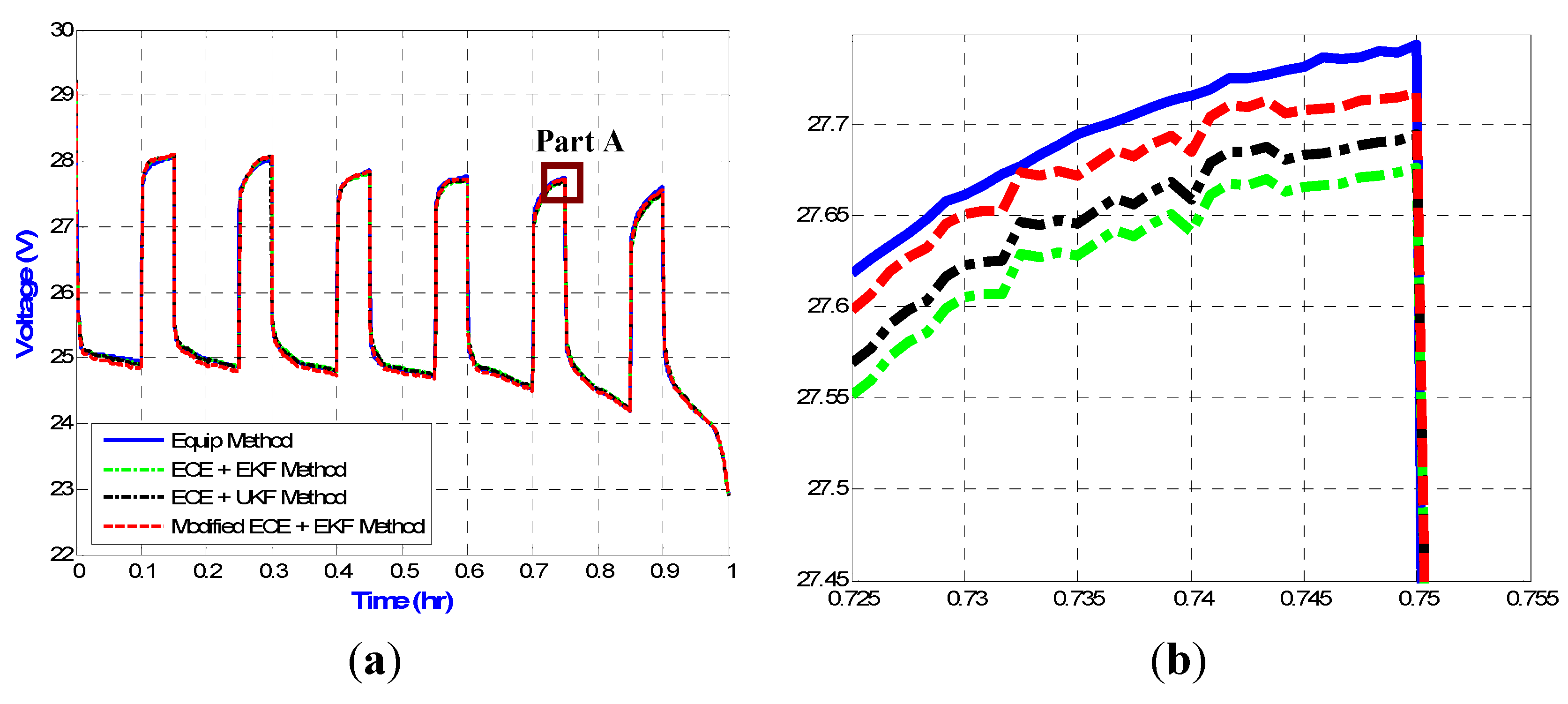
5.2. Experiment I: Under Fixed Constant-Current Pulse Conditions


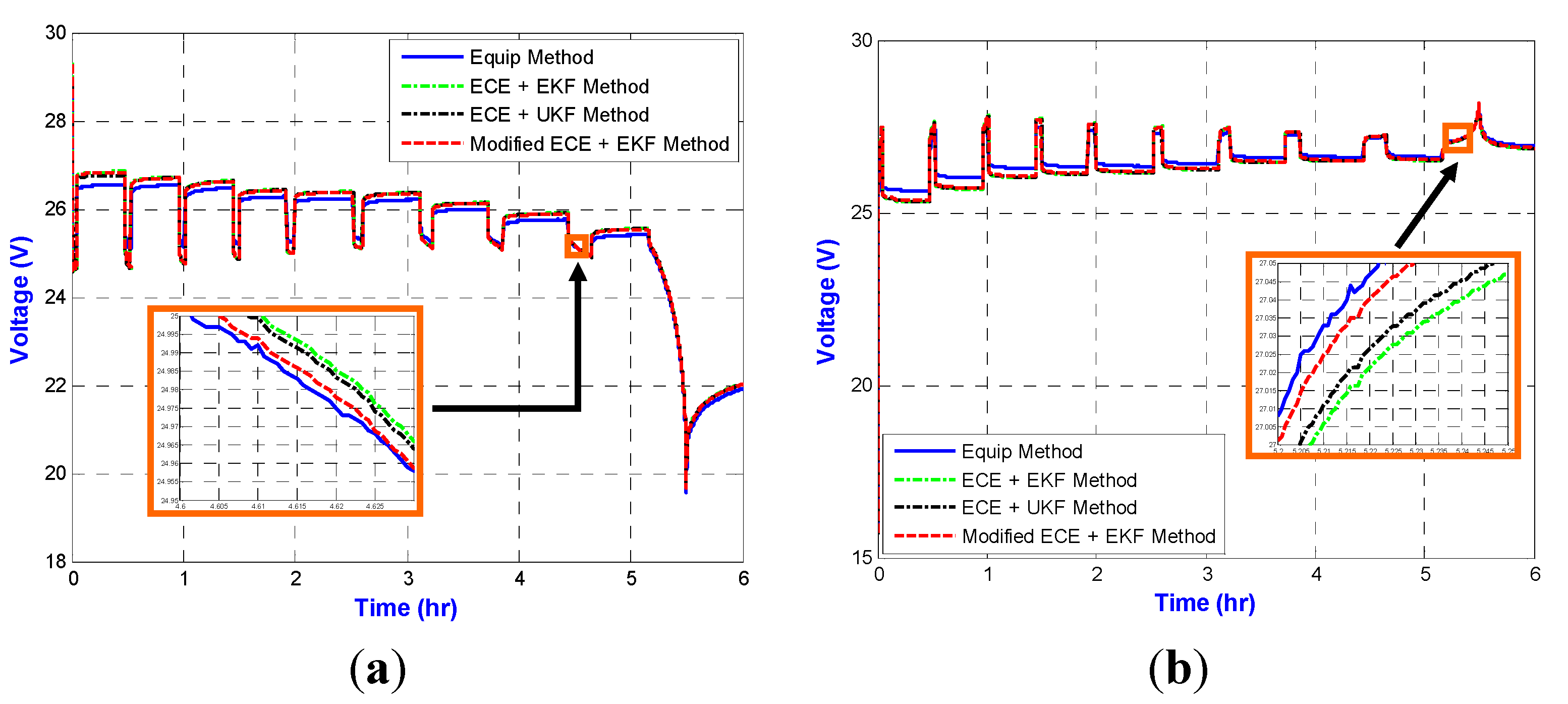
5.3. Experiment II: Under Different Constant-current Pulse Test



5.4. Model Parameter Identification
| Parameter | Experiment I | Experiment II | |
|---|---|---|---|
| Discharge | Charge | ||
| K0 | 29.5111 | 27.0101 | 28.3471 |
| K1 | –0.0078 | 0.1242 | 0.0015 |
| K2 | 0.00392 | 0.0698 | 1.8381 |
| K3 | 0.0847 | –0.0016 | 0.8825 |
| K4 | 0.0142 | –0.1993 | –0.3220 |
| R+ | 0.018 | 0.0818 | 0 |
| R– | 0.0194 | 0 | 0.0795 |
| H | –0.1187 | 0.6548 | –0.5651 |
| Parameter | Quality | Value | Unit |
|---|---|---|---|
| C | nominal capacity | 8.4 | AH |
| ηC/3 | base coulombic efficiency | 0.9982 | - |
| KS | influence of the SOC on the coulombic efficiency | 0.98 | - |
| KSD | self-discharge coefficient | 2 × 10–8 | 1/second |
| Cov0 | state error covariance | 1 | - |
| Qw | process noise covariance | 10–9 | - |
| Rv | measurement noise covariance | 1 | - |


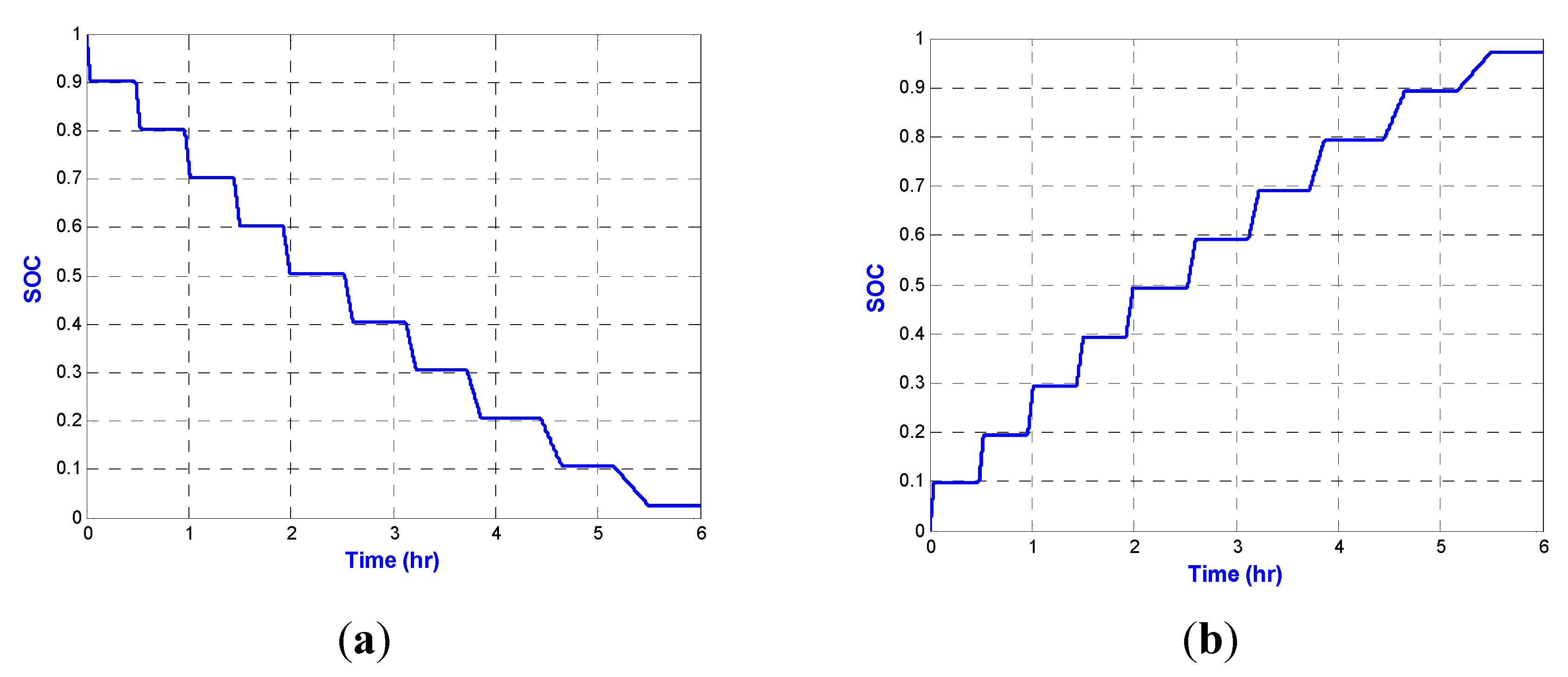
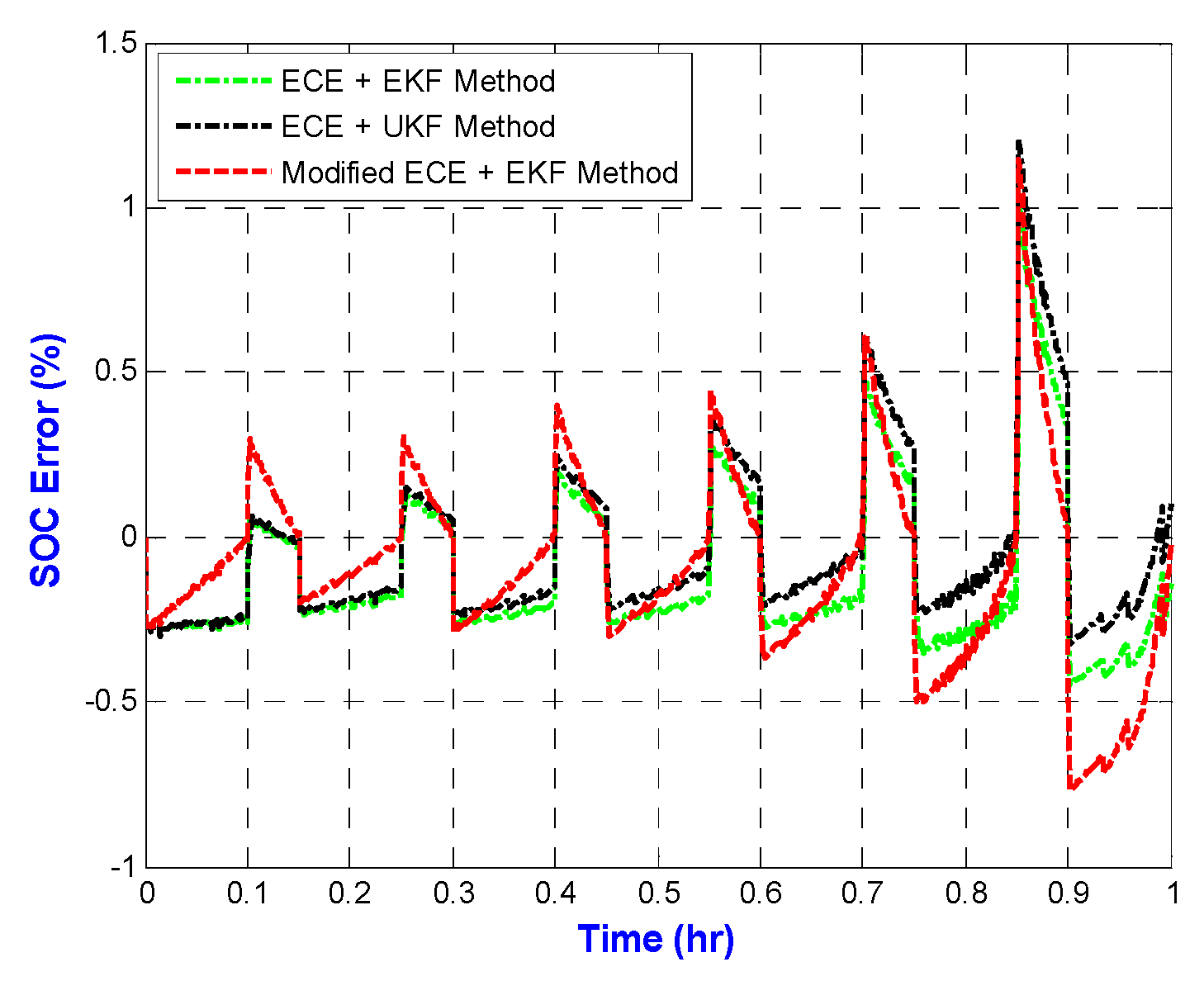
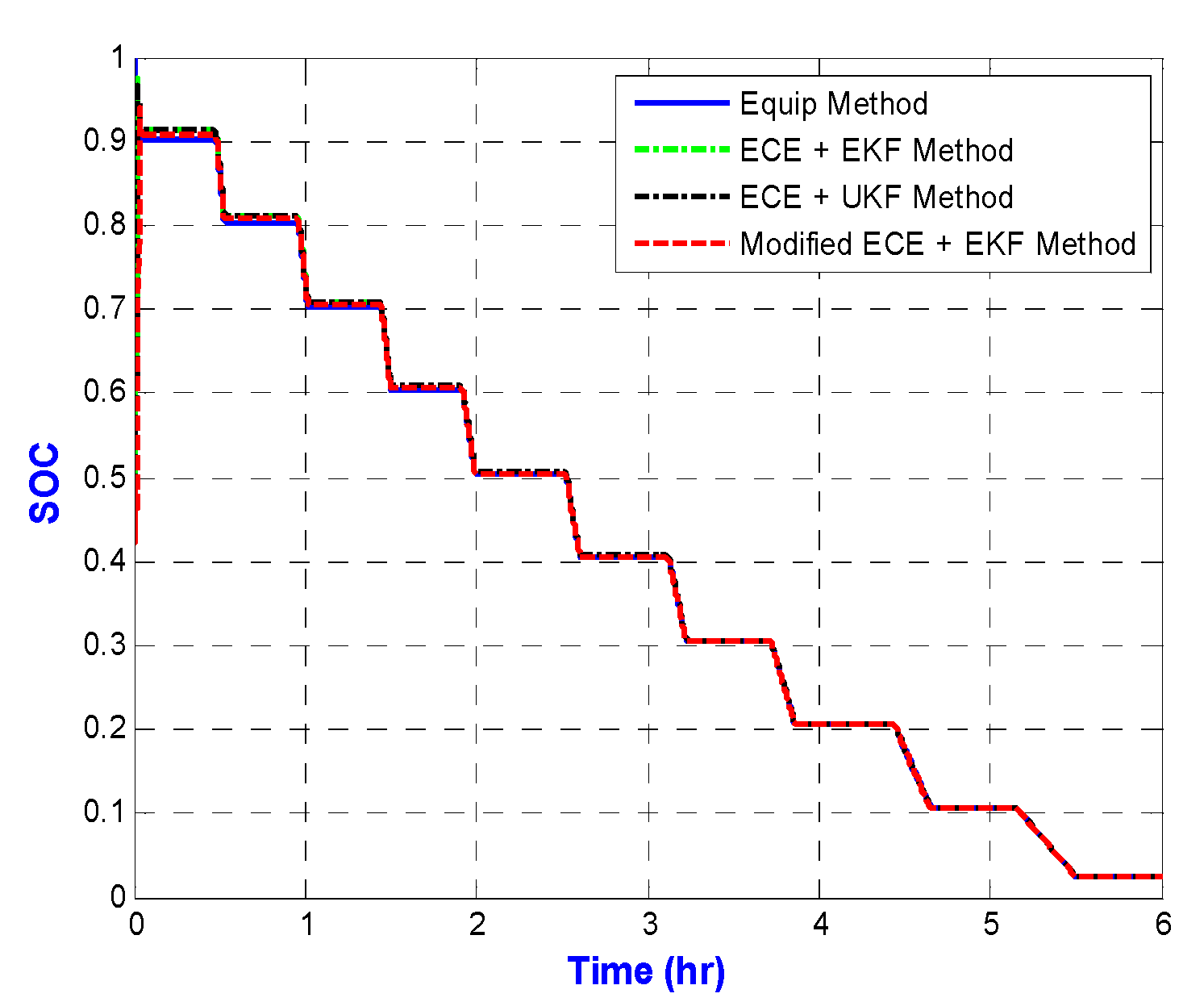
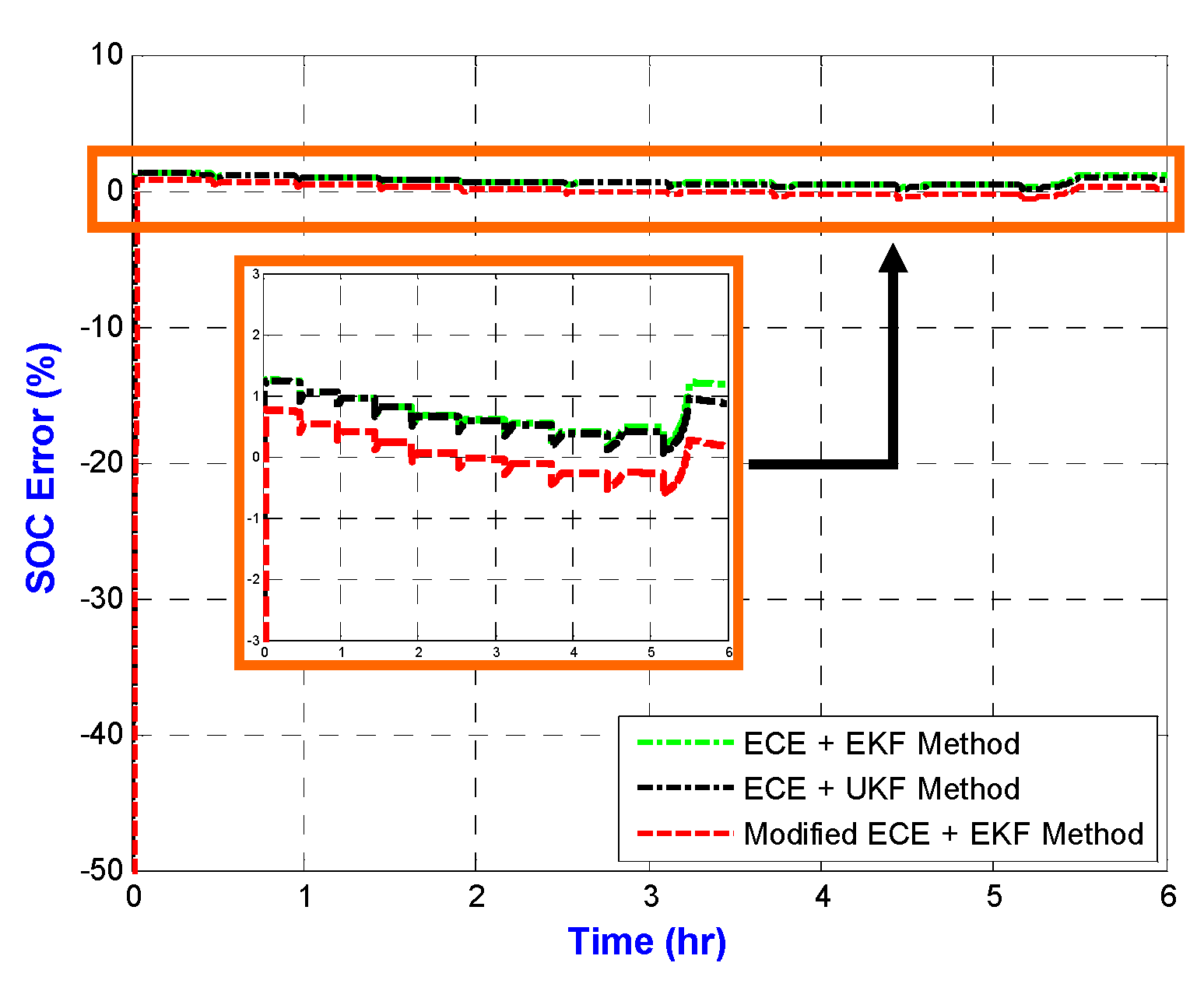
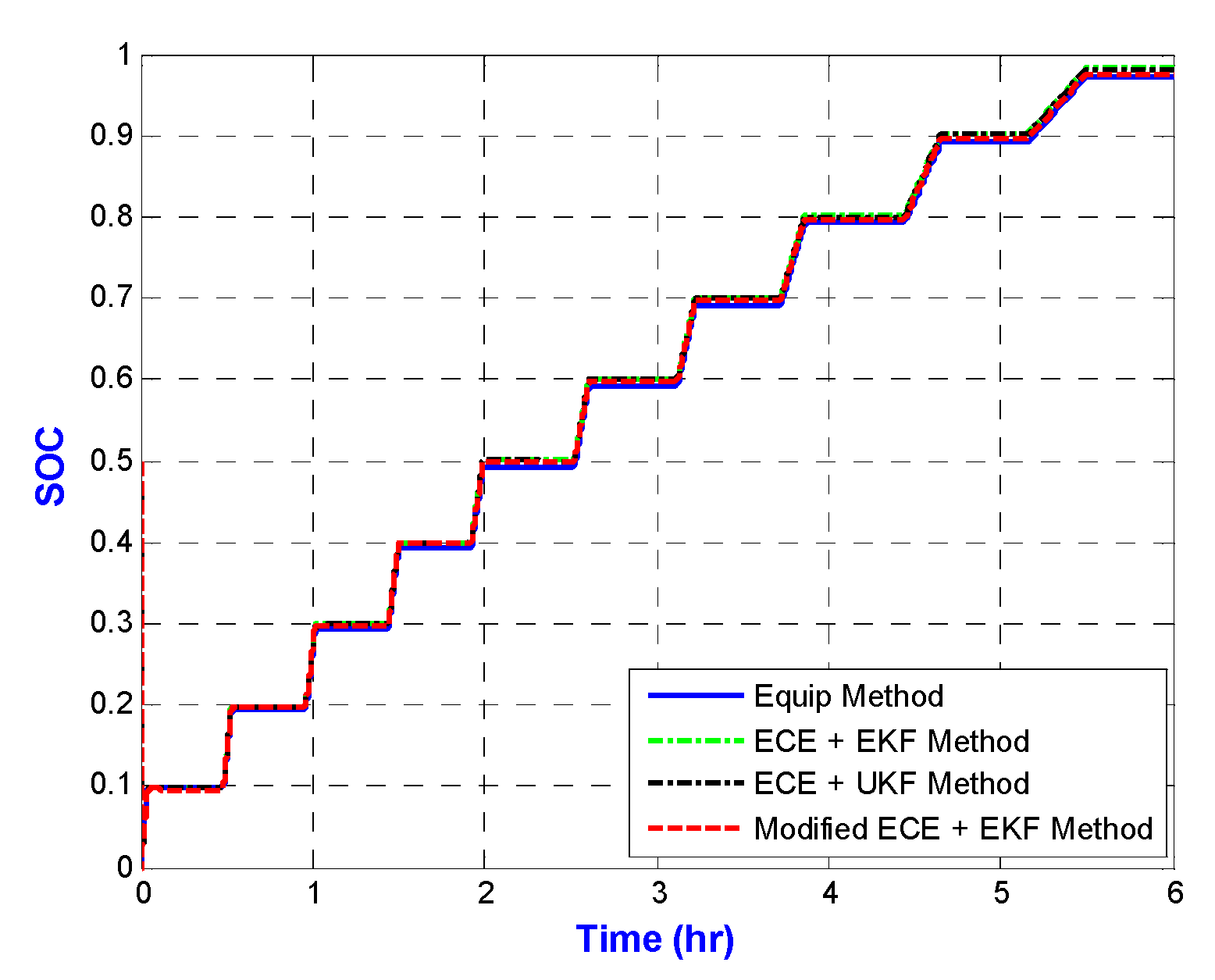
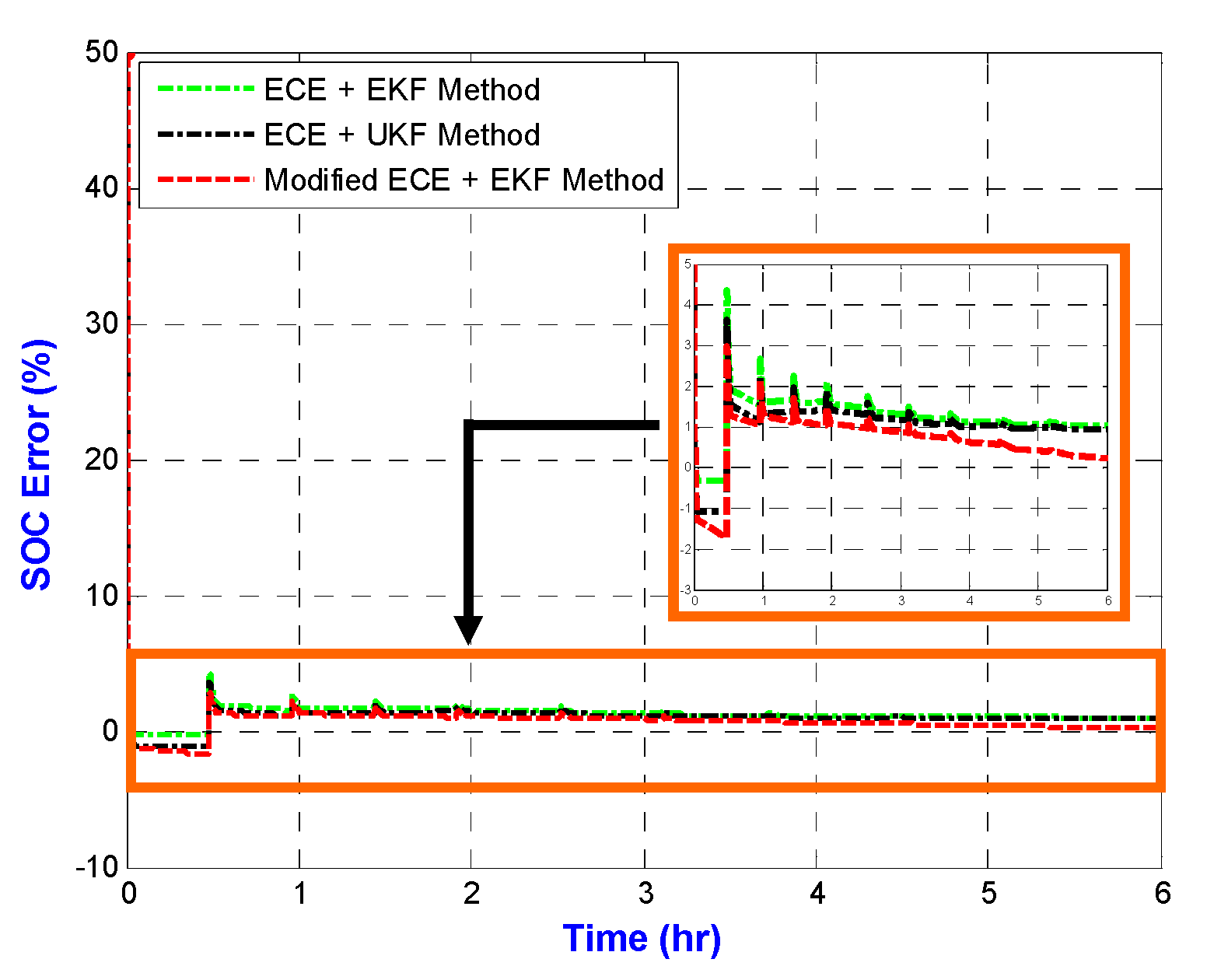
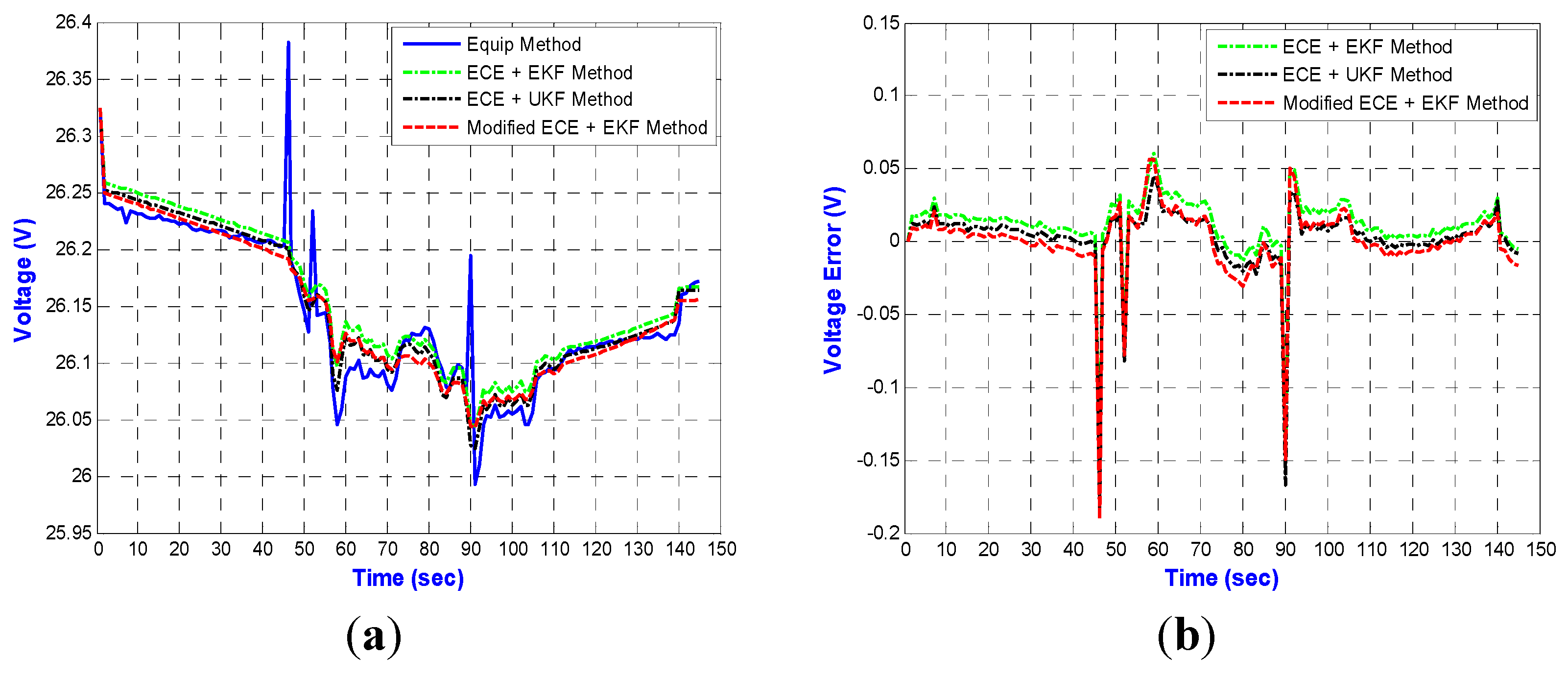
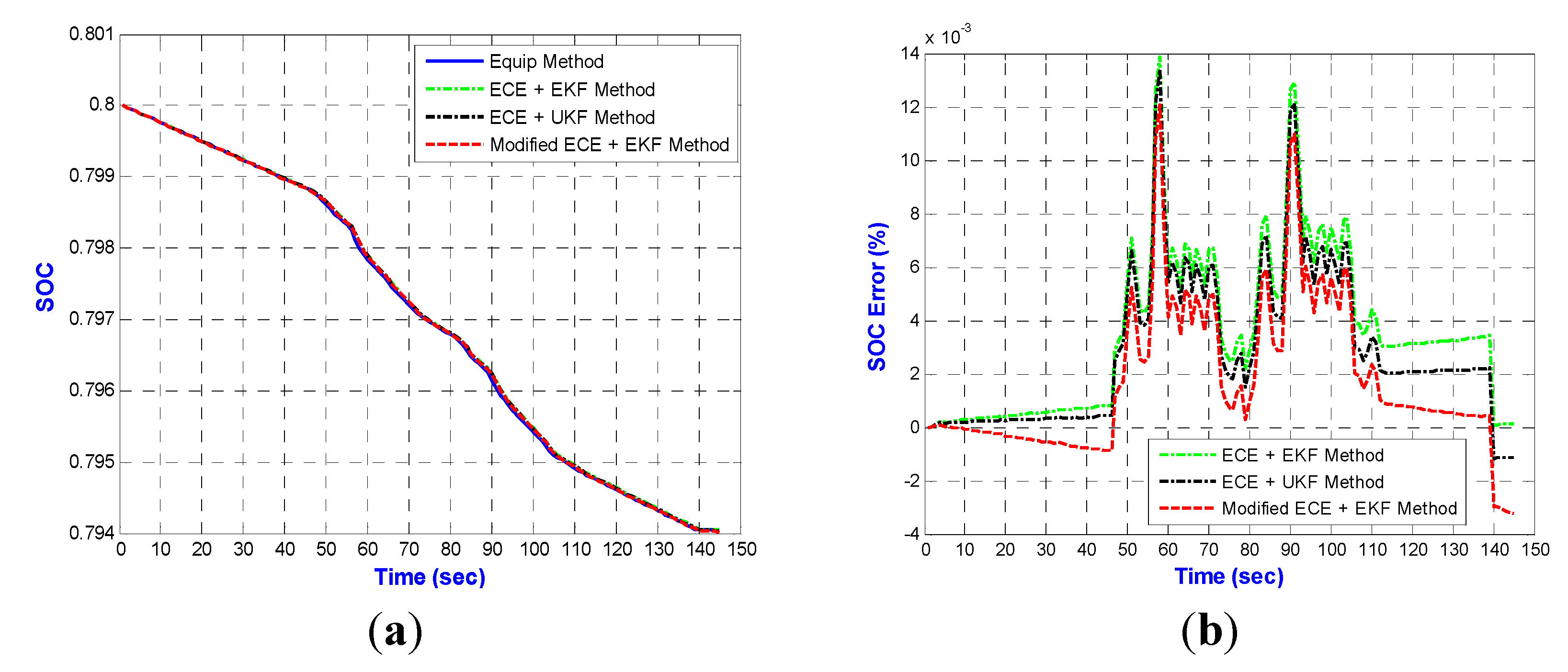
5.5. SOC Estimation Results







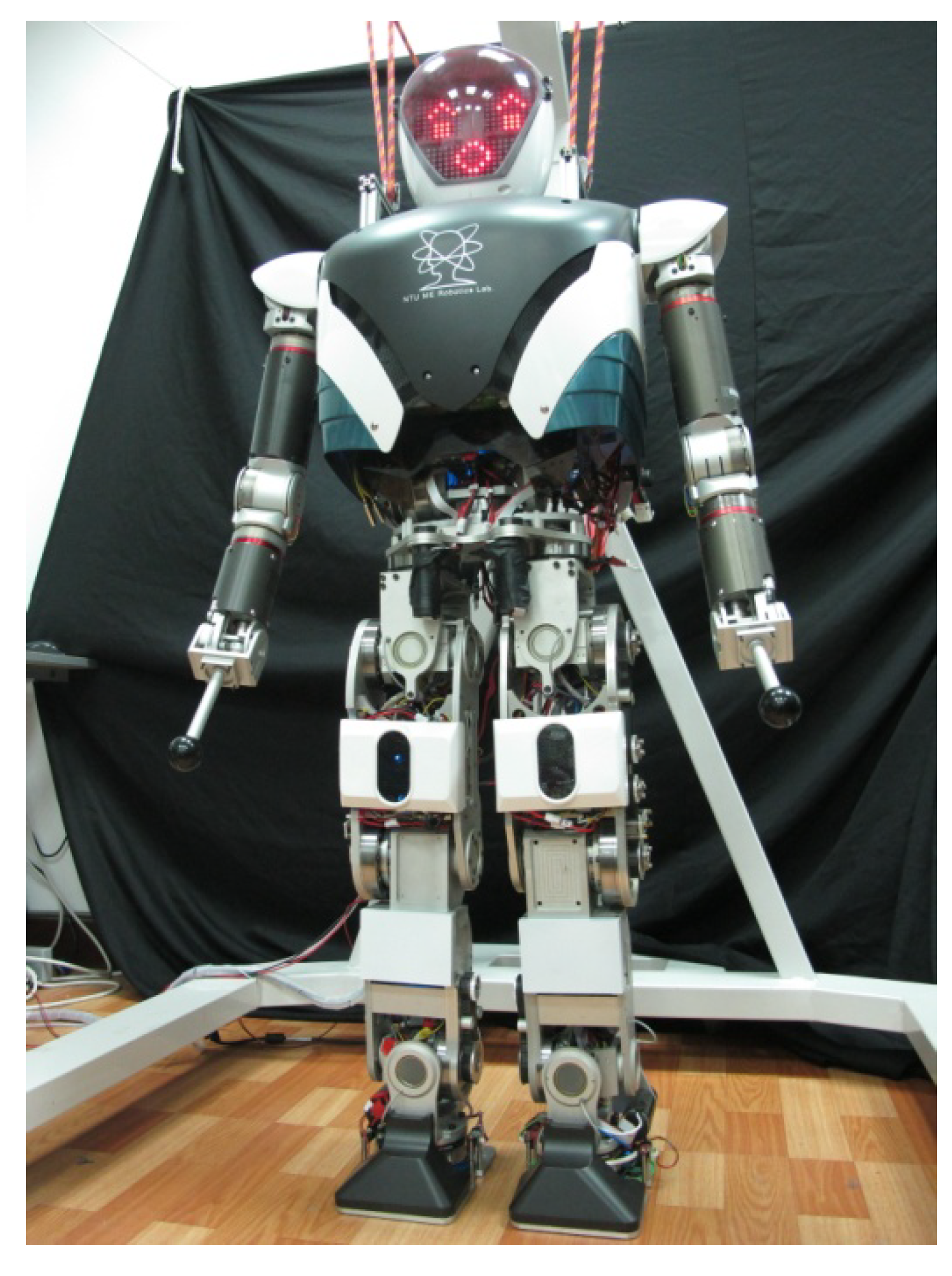
6. Application in Robots




| Performance Index | [1] | [5] | [10] | [ 24,36] | [31] | [32] | [34] | This work |
|---|---|---|---|---|---|---|---|---|
| Battery Packs | Yes | Yes | No | Yes | Yes | Yes | Yes | Yes |
| Battery Type | Ni/MH | Li-Ion | LiFePO4 | LiPB | Lead-Acid | Lead-Acid | Li-Ion | LiFePO4 |
| Nominal Capacity (Ah) | 80 | N.A. | 1.1 | 7.5 | 45 | 100 | 100 | 8.4 |
| Nominal Voltage (V) | 384 | N.A. | 3.6 | 3.8 | 12 | 8 | 64 | 26.4 |
| Initial SOC Value | 0.69 | 0.9 | 0.5 | 1 | 0.45 | 0.5 | 0.5 | 0.5 |
| SOC Estimation Error (%) | 2.5 | 1.5 | <2 | 6.5 | <0.12 | ±1 | ±1.7 | <0.25 |
| Voltage Estimation Error (V) | N.A. | N.A. | N.A. | 0.5 | N.A. | N.A. | ±1 | ±0.1 |
| On-line/Off-line | On-line | Off-line | Off-line | On-line | On-line | Off-line | On-line | On-line |
| Hysteresis Effect | Yes | Yes | Yes | Yes | No | Yes | Yes | Yes |
| Relaxation Effect | No | No | No | No | Yes | No | No | No |
| Temperature Effect | Yes | Yes | No | No | No | No | No | Yes |
| Self-Discharge Effect | Yes | No | No | No | No | No | No | Yes |
| Algorithm | ECE + EKF | ECE + EKF | Adaptive Observer | EKF | UKF | AEKF | AUKF | Modified ECE + EKF |
7. Conclusions
Acknowledgments
References
- Wang, J.; Cao, B.; Chen, Q.; Wang, F. Combined state of charge estimator for electric vehicle battery pack. Control Eng. Pract. 2007, 15, 1569–1576. [Google Scholar] [CrossRef]
- Dai, H.; Wei, X.; Sun, Z. Online SOC Estimation of High-power Lithium-Ion Batteries Used on HEVs. In Proceedings of the IEEE Conference on Vehicular Electronics and Safety, Beijing, China, 13–15 December 2006; pp. 342–347.
- Liao, Y.; Huang, J.; Zeng, Q. A novel method for estimating state of charge of lithium ion battery packs. Adv. Mater. Res. 2010, 152–153, 428–435. [Google Scholar] [CrossRef]
- Lee, S.J.; Kim, J.H.; Lee, J.M.; Cho, B.H. State-of-charge and capacity estimation of lithium-ion battery using a new open-circuit voltage versus state-of-charge. J. Power Sources 2008, 185, 1367–1373. [Google Scholar] [CrossRef]
- Liao, C.L.; Li, H.J.; Wang, L.F. A Dynamic Equivalent Circuit Model of LiFePO4 Cathode Material for Lithium Ion Batteries on Hybrid Electric Vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–11 September 2009; pp. 1662–1665.
- Chiang, Y.H.; Sean, W.Y. Dynamical Estimation of State-of-Health of Batteries by Using Adaptive Observer. In Proceedings of the 2nd International Conference on Power Electronics and Intelligent Transportation System, Shenzhen, China, 19–20 December 2009; Volume 1, pp. 110–115.
- Kim, I.S. A technique for estimating the state of health of lithium batteries through a dual-sliding-mode observer. IEEE Trans. Power Electron. 2010, 25, 783–794. [Google Scholar]
- Zhang, H.; Chow, M.Y. Comprehensive Dynamic Battery Modeling for PHEV Applications. In Proceedings of the IEEE Power and Energy Society General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–6.
- Hu, X.S.; Sun, F.C.; Zou, Y. Estimation of state of charge of a lithium-ion battery pack for electric vehicles using an adaptive Luenberger observer. Energies 2010, 3, 1586–1603. [Google Scholar] [CrossRef]
- Roscher, M.A.; Sauer, D.U. Dynamic electric behavior and open-circuit-voltage modeling of LiFePO4-based lithium ion secondary batteries. J. Power Sources 2011, 196, 331–336. [Google Scholar] [CrossRef]
- Kim, J.; Shin, J.; Jeon, C.; Cho, B. High Accuracy State-of-charge Estimation of Li-Ion Battery Pack based on Screening Process. In Proceedings of the 26th Applied Power Electronics Conference and Exposition, Fort Worth, TX, USA, 17–21 March 2011; pp. 1984–1991.
- Hu, X.S.; Sun, F.C.; Zou, Y.; Peng, H. Online Estimation of an Electric Vehicle Lithium-Ion Battery Using Recursive Least Squares with Forgetting. In Proceedings of the American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 935–940.
- Schmidt, J.P.; Chrobak, T.; Ender, M.; Illig, J.; Klotz, D.; Ivers-Tiffee, E. Studies on LiFePO4 as cathode material using impedance spectroscopy. J. Power Sources 2011, 196, 5342–5348. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, C.Y.; Tang, X. Cycling degradation of an automotive LiFePO4 lithium-ion battery. J. Power Sources 2011, 196, 1513–1520. [Google Scholar] [CrossRef]
- Uno, M.; Tanaka, K. Influence of high-frequency charge-discharge cycling induced by cell voltage equalizers on the life performance of lithium-ion cells. IEEE Trans. Veh. Technol. 2011, 60, 1505–1515. [Google Scholar] [CrossRef]
- Szumanowski, A.; Chang, Y.H. Battery management system based on battery nonlinear dynamics modeling. IEEE Trans. Veh. Technol. 2008, 57, 1425–1432. [Google Scholar] [CrossRef]
- Gould, C.R.; Bingham, C.M.; Stone, D.A.; Bentley, P. State of Health Estimation of VRLA Batteries Using Fuzzy Logic. In Proceedings of the 18th Iranian Conference on Electrical Engineering, Isfahan, Iran, 11–13 May 2010; pp. 629–634.
- Chen, Z.; Qiu, S.; Masrur, M.A.; Murphey, Y.L. Battery State of Charge Estimation Based on a Combined Model of Extended Kalman Filter and Neural Networks. In Proceedings of the International Joint Conference on Neural Networks, San Jose, CA, USA, 31 July–5 August 2011; pp. 2156–2163.
- Guo, G.; Wu, X.; Zhuo, S.; Xu, P.; Xu, G.; Cao, B. Prediction State of Charge of Ni-MH Battery Pack Using Support Vector Machines for Hybrid Electric Vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–4.
- Bhangu, B.S.; Bentley, P.; Stone, D.A.; Bingham, C.M. Nonlinear observers for predicting state-of-charge and state-of-health of lead-acid batteries for hybrid-electric vehicles. IEEE Trans. Veh. Technol. 2005, 54, 783–794. [Google Scholar] [CrossRef]
- Nam, O.; Lee, J.; Lee, J.; Kim, J.; Cho, B.H. Li-ion Battery SOC Estimation Method Based on the Reduced Order Extended Kalman Filtering. In Proceedings of the 4th International Energy Conversion Engineering Conference and Exhibit, San Diego, CA, USA, 26–29 June 2006; pp. 1–9.
- Vasebi, A.; Partovibakhsh, M.; Bathaee, S.M.T. A novel combined battery model for state-of-charge estimation in lead-acid batteries based on extended Kalman filter for hybrid electric vehicle applications. Hybrid Electr. Veh. 2007, 174, 30–40. [Google Scholar]
- Feng, X.; Sun, Z. A Battery Model Including Hysteresis for State-of-Charge Estimation in Ni-MH. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–5.
- Plett, G.K. Extended kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Han, J.; Sunwoo, M. Extended Kalman Filtering for State of Charge Estimation of Lead-Acid Batteries. In Proceedings of the International Federation of Automotive Engineering Societies, Munich, Germany, 14–19 September 2008; pp. 1–7.
- Xu, J.; Gao, M.; He, Z.; Yao, J.; Xu, H. Design and Study on the State of Charge Estimation for Lithium-Ion Battery Pack in Electric Vehicle. In Proceedings of the International Conference on Artificial Intelligence and Computational Intelligence, Las Vegas, NV, USA, 7–8 November 2009; Volume 3, pp. 316–320.
- He, Z.; Gai, M.; Xu, J. EKF-Ah based State of Charge Online Estimation for Lithium-Ion Power Battery. In Proceedings of the International Conference on Computational Intelligence and Security, Beijing, China, 11–14 December 2009; pp. 142–145.
- Shi, P.; Zhao, Y.; Shi, P. Application of Unscented Kalman Filter in the SOC Estimation of Li-Ion Battery for Autonomous Mobile Robot. In Proceedings of the IEEE International Conference on Information Acquisition, Weihai, China, 20–23 August 2006; pp. 1279–1283.
- Zhang, F.; Liu, G.J.; Fang, L.J. Battery State Estimation Using Unscented Kalman Filter. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 1863–1868.
- Santhanagopalan, S.; White, R.E. State of charge estimation using an unscented filter for high power lithium ion cells. Int. J. Energy Res. 2010, 34, 152–163. [Google Scholar] [CrossRef]
- Zhang, J.L.; Xia, C.Y. State-of-charge estimation of valve regulated lead acid battery based on multi-state unscented Kalman filter. Electr. Power Energy Syst. 2011, 33, 472–476. [Google Scholar] [CrossRef]
- Han, J.; Kim, D.; Sunwoo, M. State-of-charge estimation of lead-acid batteries using an adaptive extended Kalman filter. J. Power Sources 2009, 188, 606–612. [Google Scholar] [CrossRef]
- Wang, J.; Guo, J.; Ding, L. An adaptive Kalman filtering based state of charge combined estimator for electric vehicle battery pack. Energy Convers. Manag. 2009, 50, 3182–3186. [Google Scholar] [CrossRef]
- Sun, F.C.; Hu, X.S.; Zou, Y.; Li, S. Adaptive unscented Kalman filtering for state of charge estimation of a lithium-ion battery for electric vehicles. Energy 2011, 36, 3531–3540. [Google Scholar] [CrossRef]
- Peukert’s Law. Available online: http://en.wikipedia.org/wiki/Peukert's_law (accessed on 17 September 2012).
- Plett, G.K. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Lin, C.; Chen, Q.S.; Wang, J.P.; Huang, W.H.; Wang, Y.C. Improved Ah counting method for state of charge estimation of electric vehicle batteries. J. Tsinghua Univ. 2006, 46, 247–251. [Google Scholar]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Chang, M.-H.; Huang, H.-P.; Chang, S.-W. A New State of Charge Estimation Method for LiFePO4 Battery Packs Used in Robots. Energies 2013, 6, 2007-2030. https://doi.org/10.3390/en6042007
Chang M-H, Huang H-P, Chang S-W. A New State of Charge Estimation Method for LiFePO4 Battery Packs Used in Robots. Energies. 2013; 6(4):2007-2030. https://doi.org/10.3390/en6042007
Chicago/Turabian StyleChang, Ming-Hui, Han-Pang Huang, and Shu-Wei Chang. 2013. "A New State of Charge Estimation Method for LiFePO4 Battery Packs Used in Robots" Energies 6, no. 4: 2007-2030. https://doi.org/10.3390/en6042007
APA StyleChang, M. -H., Huang, H. -P., & Chang, S. -W. (2013). A New State of Charge Estimation Method for LiFePO4 Battery Packs Used in Robots. Energies, 6(4), 2007-2030. https://doi.org/10.3390/en6042007