1. Introduction
In recent years, with the rapid development of the Chinese economy, many cities are facing increasingly serious social issues, such as traffic congestion and worsening environmental pollution. For the purpose of improving the urban environment, the development of modern urban transit, which has the significant advantages of large capacity, punctuality, safety, energy conservation and environmental protection, becomes a social consensus [
1,
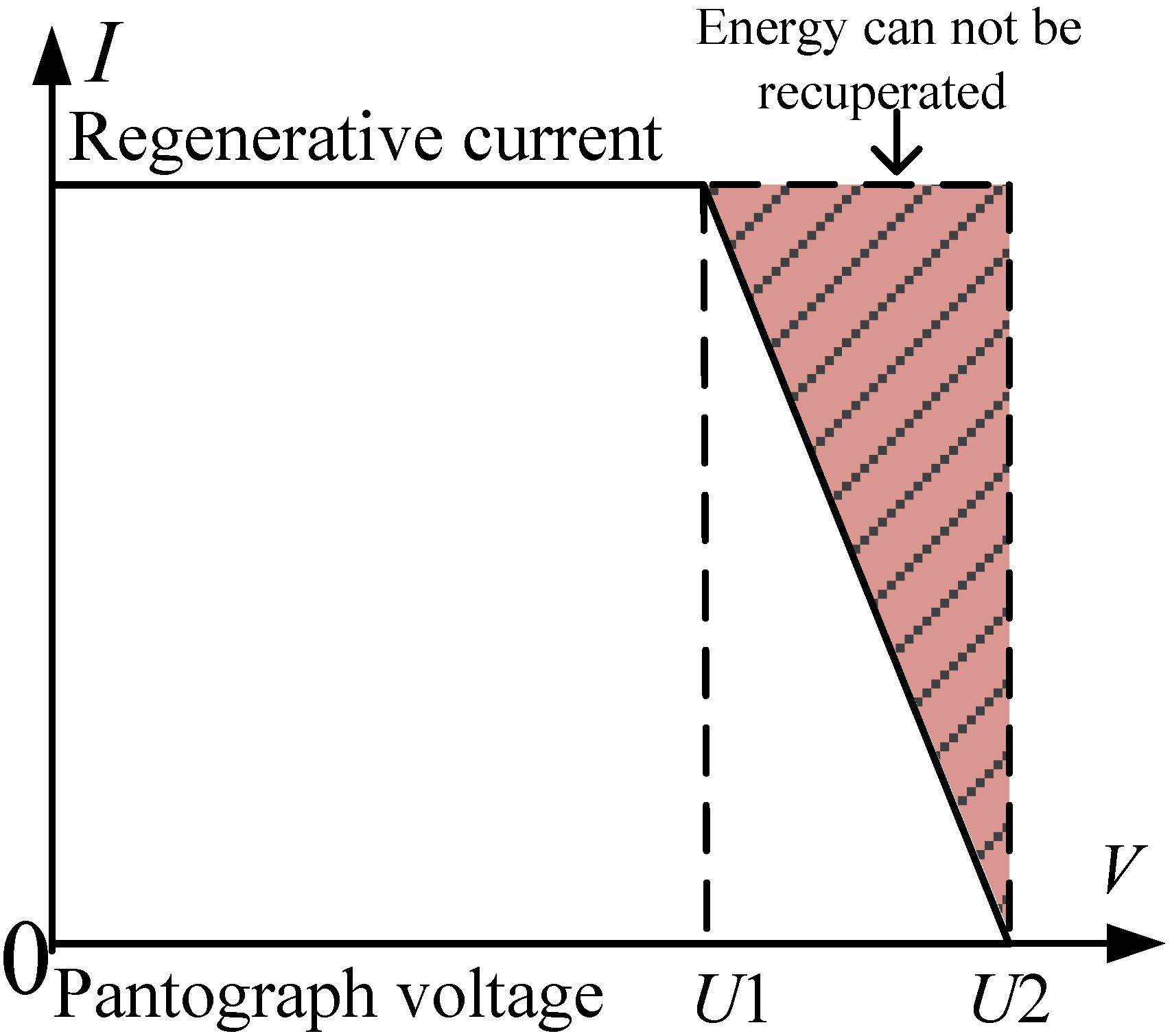
2]. Low running resistance and the use of regenerative braking are two main factors that make the metro train better than other means of transport in saving energy. In the modern urban railway system, vehicle braking energy was commonly fed back to the catenary by the method of regenerative braking. However, due to the diode rectifier of the traction supply network, surplus regenerating energy cannot feedback to a medium-voltage network. When a metro train is running in the condition of regenerative braking, if there are no adjacent accelerating trains or energy absorbing devices to absorb the regenerative energy, the train pantograph voltage would exceed the normal range, which leads to the overvoltage protection of the vehicle traction system, that is, the cancellation of regeneration braking happens [
3,
4]. At this moment, vehicle surplus braking energy can be only transferred into heat energy by mechanical braking or on-board resistors. Hence, how to prevent regeneration cancellation, reduce energy consumption and make full use of regenerative braking energy to improve train operation performance, have become universal concerns in world urban rail transit fields.
In order to maximize the use of the surplus energy, energy storage technologies, including the flywheel, battery and ultra-capacitor are always suggested for using in urban rail system [
5,
6,
7]. Compared to other storage technology, the ultra-capacitor has the advantages of rapid charging and discharging frequencies, a long cycle life and high power density, which highly match the characteristics of urban rail transit, such as short running time between stations, frequent accelerating and braking, booming power within a short time,
etc. Thus, the ultra-capacitor becomes a major promising alternative of energy storage technologies in the urban rail system and has gradually been applied at home and abroad [
7,
8,
9,
10]. According to the installation location of ESS, it can be divided into two kinds of installation: on-board and stationary [
7]. On-board ESSs’ efficiency is high with low loss in the storing and releasing of surplus energy, but restrictive in terms of vehicle weight and space; in contrast, stationary ESSs have no restrictions of weight and required space, but it is difficult to determine its best location and size, namely, the optimal place for locating and sizing, which has become an important research issue in the application of stationary ESSs. Note, there are two installation positions of stationary ESS, wayside and substation-inside. Wayside ESSs are mostly set in the track of metro line mainly for lowering the voltage fluctuation [
10]. Compared to it, substation-inside ESSs are set inside TSSs (traction substations) mainly for improving the energy savings and their best location and size will be discussed in this paper.
Several literatures have involved the stationary applications for an urban rail system, mainly these concern research on energy management strategies [
11,
12,
13,
14] and optimal location and size [
15,
16,
17,
18,
19,
20,
21]. In [
11,
12,
13,
14], some novel energy management strategies of stationary ESS are put forward for improving the performances of railway transit systems, and verified through experimental tests. In [
15,
16], the optimal design of the stationary storage device is regarded as a classical isoperimetric problem, and based on which a multi-objective optimization function is established from points of voltage fluctuation, substation current and ESS size, and then the optimized ESS size is determined by the analysis of the energy interactive relationship between ESS and terminal substation; nevertheless, the global power flow of DC net has not been taken into account. In [
17], ESSs are configured with regards to energy content, voltage variation, maximum current and power losses under different traffic conditions with an “effect-cause” simulation tool. However, the paper only analyzes the conditions with specified sizes and locations without considering other configuration possibilities. In [
18], a useful method is proposed to predict the maximum instantaneous regenerative energy of each station before applying ESS and based on which the ESS configuration for each station is determined. In [
19], a configuration criterion is mainly based on a polynomial approximation of the load distribution, which will be representative of the best fit for different load configurations. In [
20], according to the statistic measurement of substations along Seoul metro line 2, it is summarized that substation regenerative energy is about 39% of traction energy, which offers guidance for ESS size configuration at every substation. In [
21,
22,
23], a self-developed supply network load-flow software is utilized to obtain the ESS size of every substation under the constraint of DC-net voltage fluctuation and energy saving is assessed based on it.
However, through summarizing above literatures, two main configuration problems should be taken into account. First, in most literatures, ESSs are always configured based on that all substations are installed with ESS or under the condition that ESS are installed with specified sizes and locations, without considering other more optimal configuration possibilities. Second, the power levels and capacities of ESSs are generally determined by the maximum regenerative power and energy of substations in almost all literatures, but actually, some substations may present with high peak power but low mean power in certain traffic volume, under which circumstances there is no need to configure ESS with peak power. Similarly, because of the frequent energy interactive between vehicles and ESSs, smaller ESS size might be similarly suitable because of that surplus regenerative energy that cannot be absorbed would flow to adjacent ESSs.
In this paper, the dynamic model of the DC rail system has been established to simulate the electrical load-flow of a traction supply network using Matlab/Simulink, and then the optimization objection is evaluated in the example of a Chinese metro line from the perspectives of energy savings, voltage profile and installation cost. Ultimately, a methodology for optimal ultra-capacitor energy storage system locating and sizing is put forward based on the improved genetic algorithm. Considering different traffic volume, the best configuration schemes can be obtained to equally satisfy the need for better energy savings, voltage profile and lower installation cost.
3. Simulation Methodology
3.1. Case Study
To assess the reasonability of optimization strategy, a sample urban railway line is studied in this paper. The total length of the line is about 24.6 km along with 22 stations, of which there are 13 traction substations and their distribution is shown in
Table 1. The vehicle data and DC network parameters are shown as
Table 2. These parameters are provided by Beijing Subway Company.
Table 1.
TSS spacing distances.
Table 1.
TSS spacing distances.
| No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|
| Spacing(km) | 1.11 | 1.93 | 2.16 | 2.3 | 2.12 | 2.7 | 2.76 | 1.53 | 1.77 | 1.88 | 2.6 | 1.0 |
Table 2.
Vehicle data.
| Parameter | Value | Parameter | Value |
|---|
| Formation | 3M3T | Inverter efficiency | 0.97 |
| Load Condition | 312.9t (AW3) | Motor efficiency | 0.915 |
| Rated voltage | 750 V | Gearing efficiency | 0.93 |
| AC motor/M | 180 kW × 4 | Max speed | 80 km/h |
| SIV Power | 160 kVA × 2 | Maxacceleration | 1 m/s2 |
| SIV Power factor | 0.85 | Min deceleration | −1 m/s2 |
| Floating Voltage Us | 836 V | Equivalent internal resistance Rs | 0.07 Ω |
| Contract line impendence | 0.007 Ω/km | Rail impendence | 0.009 Ω/km |
| Pantograph impendence Rf | 0.015 Ω | – | – |
The ESSs are installed in every traction substation. According to the simulation experience, the maximum of ESSs peak power are lower than 2 MW, and their capacities are always less than 10 kWh. Thus, the initialization values of the ESS size are 2 MW/10 kWh, and the charging and discharging thresholds of ESS are respectively 850 V and 800 V.
According to the analysis of the train timetable, the sample case will be simulated respectively under three major traffic scenarios: low traffic volume with vehicles time span of 600 s, moderate traffic volume of 300 s and high traffic volume of 150 s. This will be done with the following simulation platform.
3.2. Simulation Platform
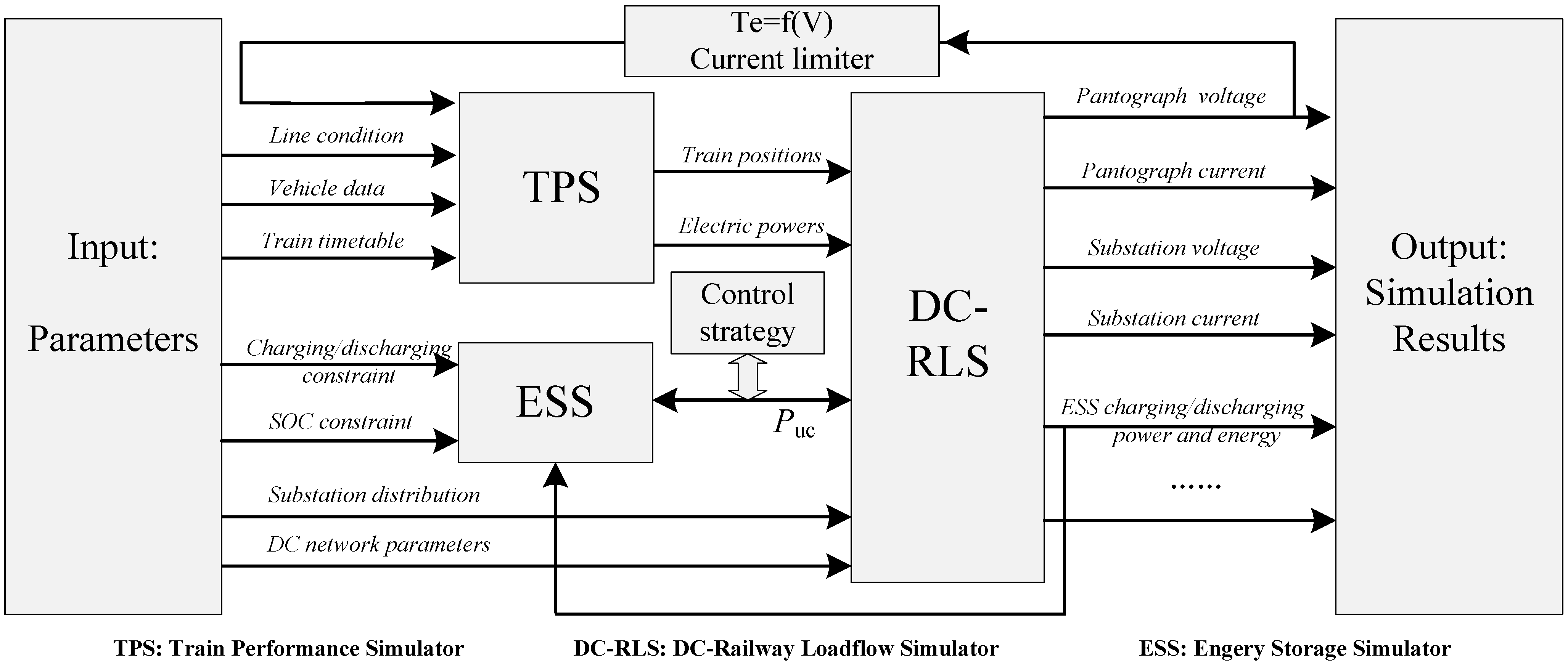
For the goal to simulate the power flow of the DC network of an urban rail system, the simulation platform of the DC railway is established in the Matlab environment, as shown in
Figure 4. The platform includes a train performance simulator (TPS), a DC railway load-flow simulator (DC-RLS) and an ultra-capacitor energy storage system (ESS). By neglecting the fast transients of trains’ state change in single simulation step size, the DC supply network can be described as a sequence of stationary states whose input data are total urban rail trains’ electric powers and their corresponding present positions.
Figure 4.
Simulator for ultra-capacitor energy storage system.
Figure 4.
Simulator for ultra-capacitor energy storage system.
TPS:
As shown in
Figure 4, the output of TPS is not only associated with line condition, vehicle data and timetable, but is also constrained by real-time train pantograph voltage. From TPS we can get positions of up-line and down-line trains and their corresponding electric power, which offer essential data for subsequent load-flow calculation of the DC supply network.
DC-RLS:
In the solving process of the DC electric network, because of its time-variation (network topology change with train movement) and nonlinearity (nonlinearity of substation and regenerative braking) of the network structure, the paper presents a new load-flow calculation methodology of component segmentation: the simulation result demonstrates the rapidity and astringency of this methodology which will be shown as follows.
(1) Component segmentation
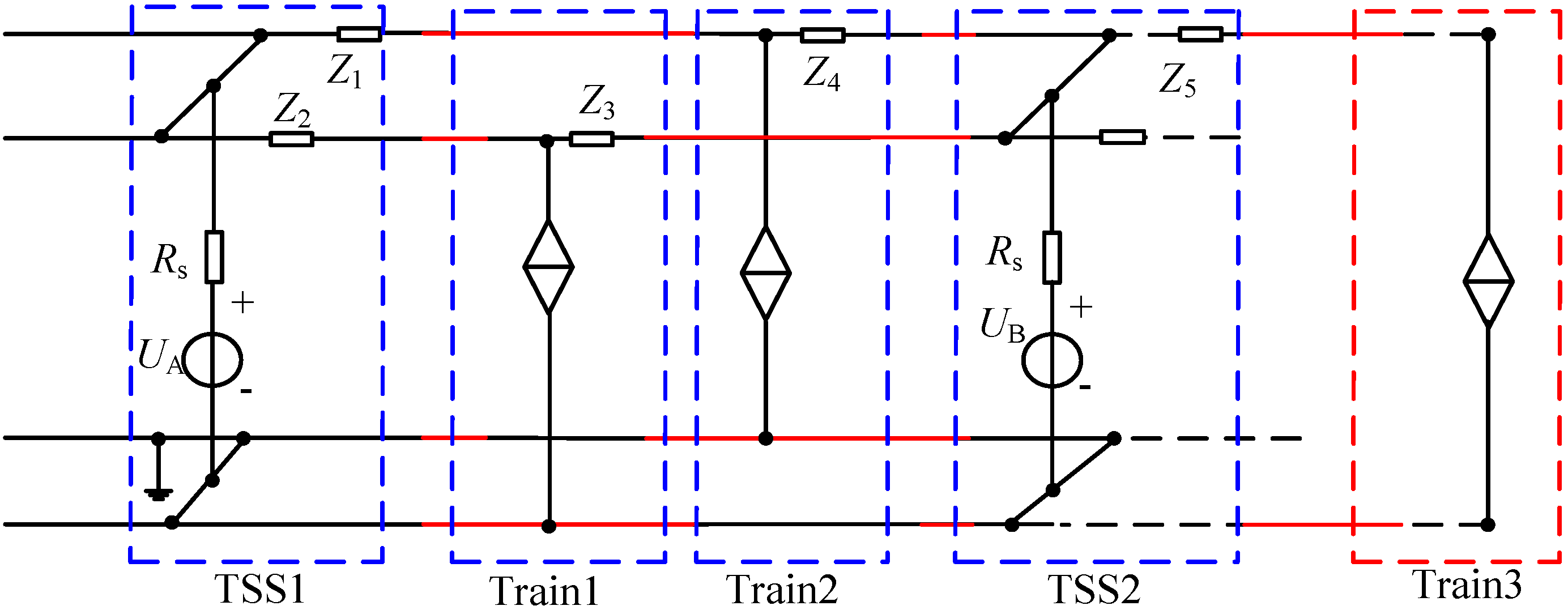
As shown in
Figure 5, the DC electric network can be segmented into two types of components, TSS and train. In this figure, there are only two trains running between TSS1 and TSS2. However, it is worth noting that the number of trains between two TSSs would increase to three or four in high traffic volume by analysis of the timetable.
Figure 5.
Segmentation of DC electric network.
Figure 5.
Segmentation of DC electric network.
(2) Subsystem component
The TSS component consists of substation and its right connected impedance
Z, which is determined by the distance to next adjacent component. The ideal voltage source
Us and its equivalent internal resistance
Rs are series connected to simulate the rectifier units load characteristic. Because of the no-controlled diode rectifying mode of TSS, the substation output current flows unidirectionally. As shown in
Figure 6, when substation output current
Isub is positive, switch S close; when
Isub is negative, S break.
U0 is substation no-load voltage. ESS is equivalent to the controlled current source and be controlled by energy control strategy which will be introduced in the following.
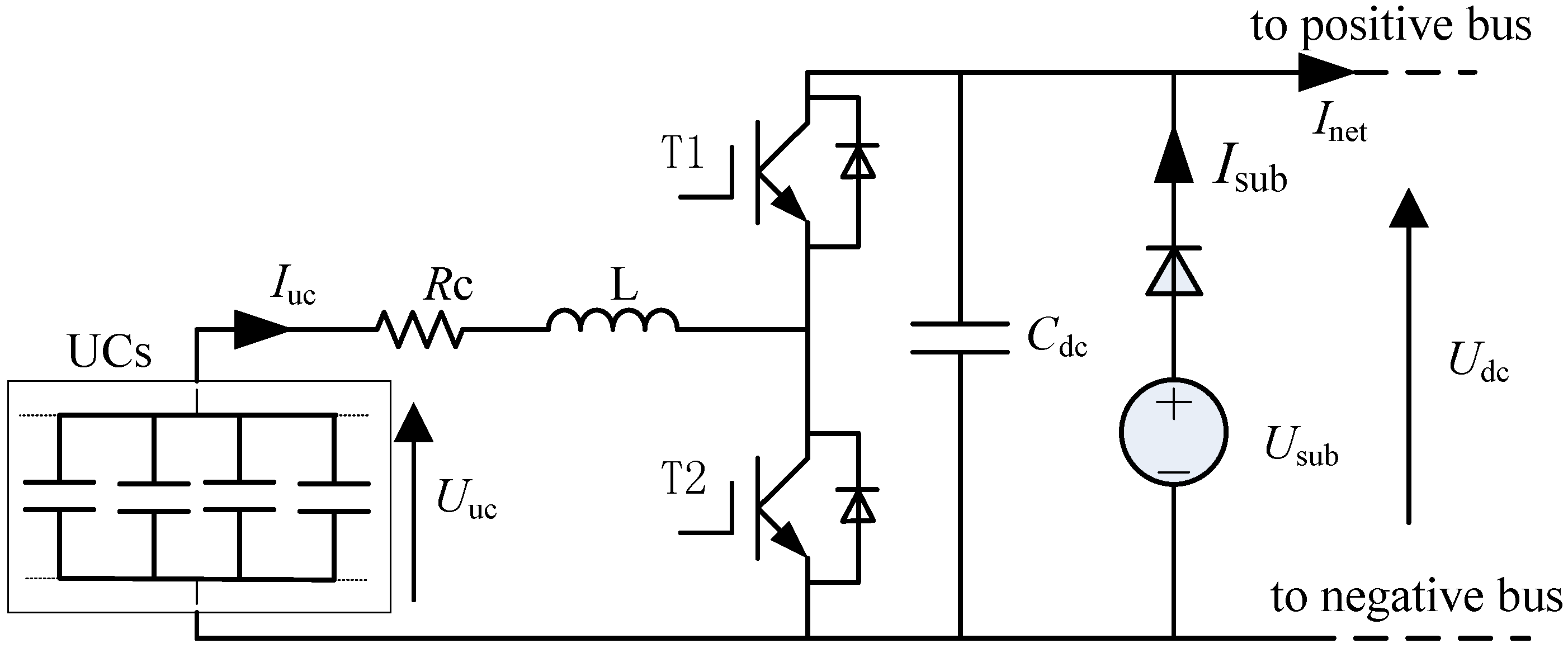
As shown in
Figure 7, the train component consists of the vehicle and its right connected impedance
Z which is determined by the distance to next adjacent component;
Rf is vehicle filter resistance;
Lf is vehicle filter inductance,
Cfc is vehicle support capacitor;
Paux is auxiliary power;
P is vehicle electric power.
Figure 7.
Train component.
Figure 7.
Train component.
ESS:
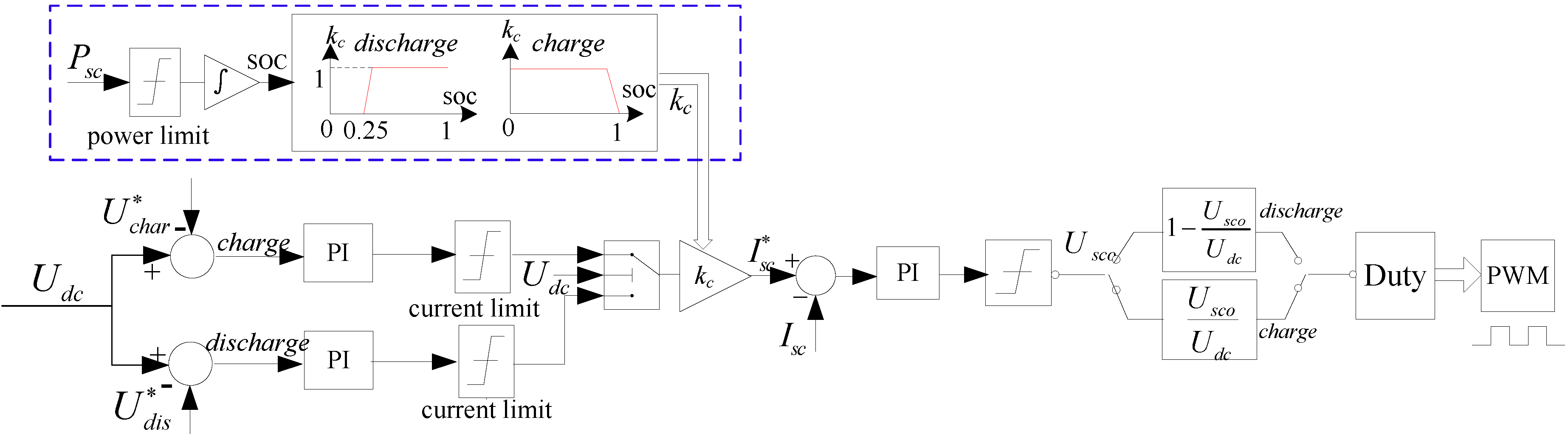
The energy control strategy of stationary ESS can be divided into three parts: DC network voltage constraint, charging/discharging control, and SOC constraint.
Uchar and
Udis are respectively the threshold values of charging and discharging, the magnitude and direction of charging and discharging current are determined by the difference value between current voltage and threshold value. When the DC network voltage fluctuates between
Udis and
Uchar, ultra-capacitors maintain the standby state. The working range of SOC is 0.25~1 for the restriction of charging and discharging the current of ultra-capacitors. The control strategy is shown in
Figure 8.
Figure 8.
Stationary ESS energy control strategy.
Figure 8.
Stationary ESS energy control strategy.
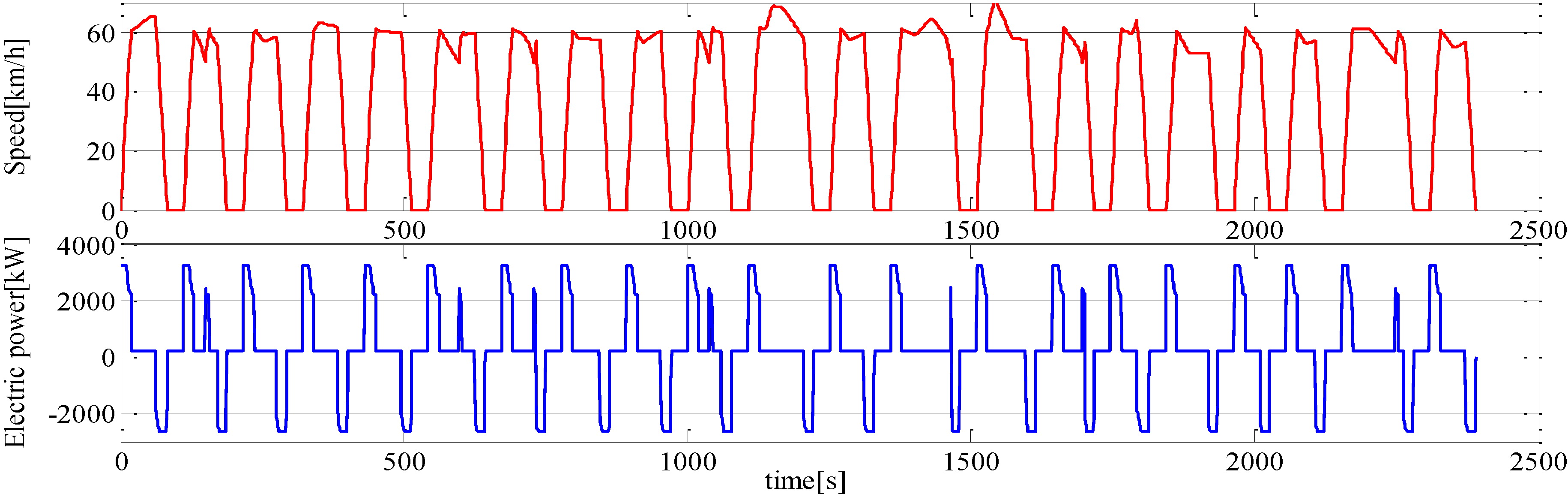
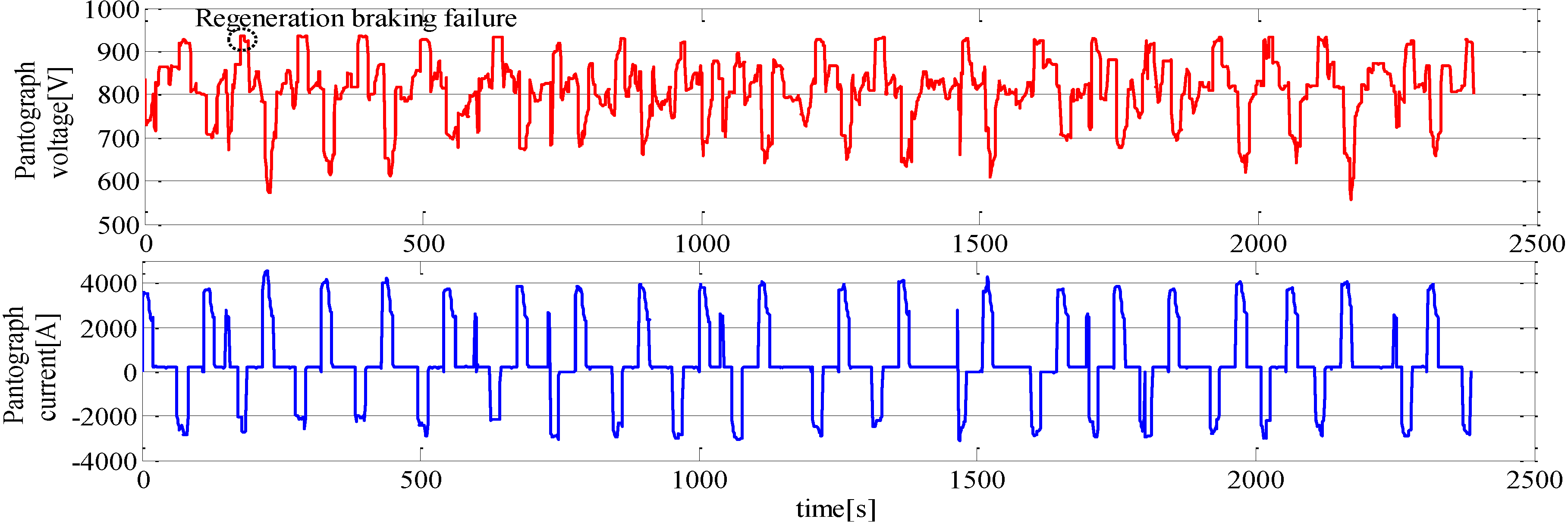
3.3. Simulation Output
Figure 9 shows where the speed and electric power of up-line train are exported from TPS.
Figure 10 shows where the up-line train pantograph voltage and current are. When up-line train is braking, the pantograph voltage may exceed 900 V, which results in regenerative braking cancellation. Take TSS2 for example, its terminal voltage and net current under low traffic volume are shown in
Figure 11, and it can be observed that the voltage and current fluctuate periodically with the time span of 600 s. The charging/discharging power and its SOC waveform of ESS that installed in TSS2 are shown in
Figure 12, when its power is positive, ESS maintains the charging state with an increasing SOC value. On the contrary, ESS is in the discharging state with decreasing SOC value: SOC varies between 0.25 and 1.
Figure 9.
The speed and electric power of up-line train.
Figure 9.
The speed and electric power of up-line train.
Figure 10.
The pantograph voltage and current of up-line train.
Figure 10.
The pantograph voltage and current of up-line train.
Figure 11.
TSS terminal voltage and net current.
Figure 11.
TSS terminal voltage and net current.
Figure 12.
ESS charging/discharging power and SOC.
Figure 12.
ESS charging/discharging power and SOC.
In a traditional configuration method, the capacities of ESSs can be calculated based on the maximum of SOC by Formula (17).
The power levels of ESSs are determined by the maximum charging or discharging power. Take TSS2 for example, its initial ESS capacity is set at 10 kWh; therefore, we can calculate that its capacity of ESS is 5.42 kWh, and its peak power is 1.1 MW from
Figure 12. The statistic values of peak and mean power, and the capacity of each substation’s ultra-capacitors under different traffic volume are shown in
Figure 13.
From
Figure 13, it is observed that the powers and capacities of ESSs under low and moderate traffic volumes are similar, but are much greater than that when there is high traffic volume.
With the decreasing of the vehicle’s time span, the probability of simultaneous regenerative braking in two or more trains increases, and the frequency of energy interaction between trains increases, too. In high traffic volume, the effect of energy interaction plays a greater and more important role, which leads to much less surplus regenerative energy being stored in the DC supply network. The high train density might also result in high instantaneous peak power derived from multi-trains’ simultaneous braking, as shown in TSS7 whose peak power is nearly 1.70 MW but mean power is only 271 kW in high traffic volume.
Figure 13.
ESS power and capacity of every TSS.
Figure 13.
ESS power and capacity of every TSS.
3.4. Location and Size Assessment
The main goal of above simulations is to evaluate the energy saving and voltage profile in the metro line by using stationary ESS and to help finding the best location and size. Thus, ESS distributions every TSS, 1TSS spacing, 2TSS spacing for the seven proposed sizes (2, 4, 6, 8, 10, 12 and 14 kWh) will be simulated under low traffic volume. Simulation results are shown in
Figure 14.
Figure 14.
Energy saving rate and regeneration cancellation rate diagram.
Figure 14.
Energy saving rate and regeneration cancellation rate diagram.
The energy saving rate and regeneration cancellation rate of the above three distribution schemes are compared in the above figures. Obviously, when all TSSs are set with ESS, the energy saving rate goes up to the maximum value of 21.64% and the regeneration cancellation rate reduces to the minimum value of 11.88%. As the number of ESSs decreases, the energy saving rate presents a declining trend and the regeneration cancellation rate displays a rising trend. Under the same distribution scheme, with the increase of ESS size, the energy saving rate increased sharply and then slowed down to a constant value, while the regeneration cancellation rate decreases and the latter flattens.
In the charging process, ESS absorbs the surplus regenerative energy of the DC-net in order to avoid the accumulation of surplus energy, which may lead to regenerative braking cancellation; namely, ESSs lower the regeneration cancellation rate. In the discharging process, ESSs provide energy for adjacent trains powering operation, which decrease the output energy consumption of substations, and increases the energy saving rate. Therefore, under the constraint condition that the charging and discharging energy of ESS finally reach consensus, energy saving rate is negatively correlated to regenerative cancellation rate, which is consistent with the simulation results.
To evaluate the global performance of the system, the concept of energy saved per ESS size installed in the line is introduced in the bottom right corner graph of
Figure 14. The tendency is clear that the ESS performance decreases with the size installed. However, it is noticed that the global energy saving rate increases with this parameter. A compromise between these two values should be found, namely, a high energy saving rate with acceptable ESS performance.
Because of their inverse relationship between energy saving rate and regeneration cancellation rate, the objective function can be further simplified by setting the weight coefficient of regeneration cancellation rate ω2 equal 0, thus the final objective function would be described with energy saving rate, installation cost and their corresponding weights. The regeneration cancellation rate will be reserved for later analysis.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


















