Electromagnetic Analysis and Design of Switched Reluctance Double-Rotor Machine for Hybrid Electric Vehicles


Abstract
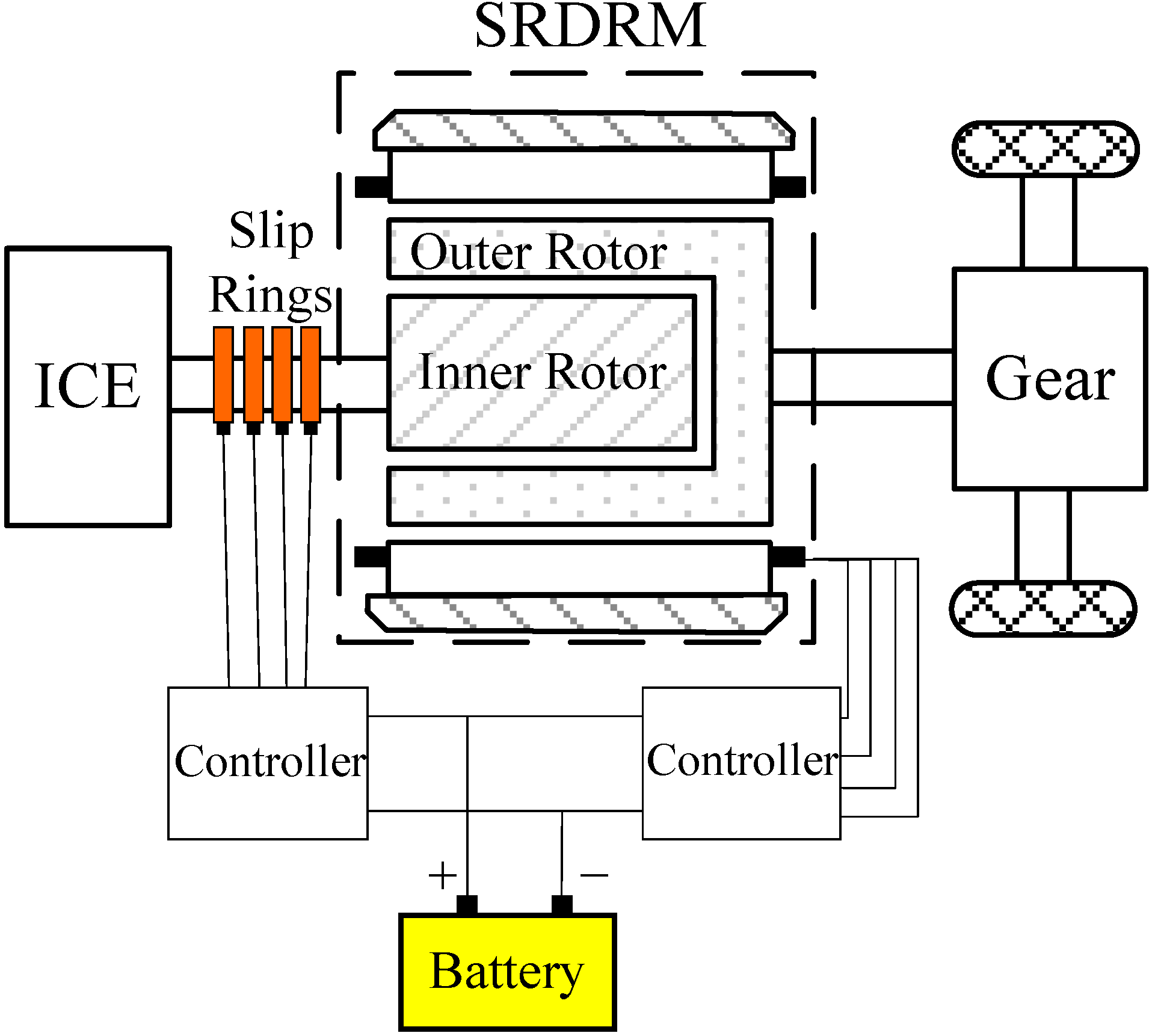
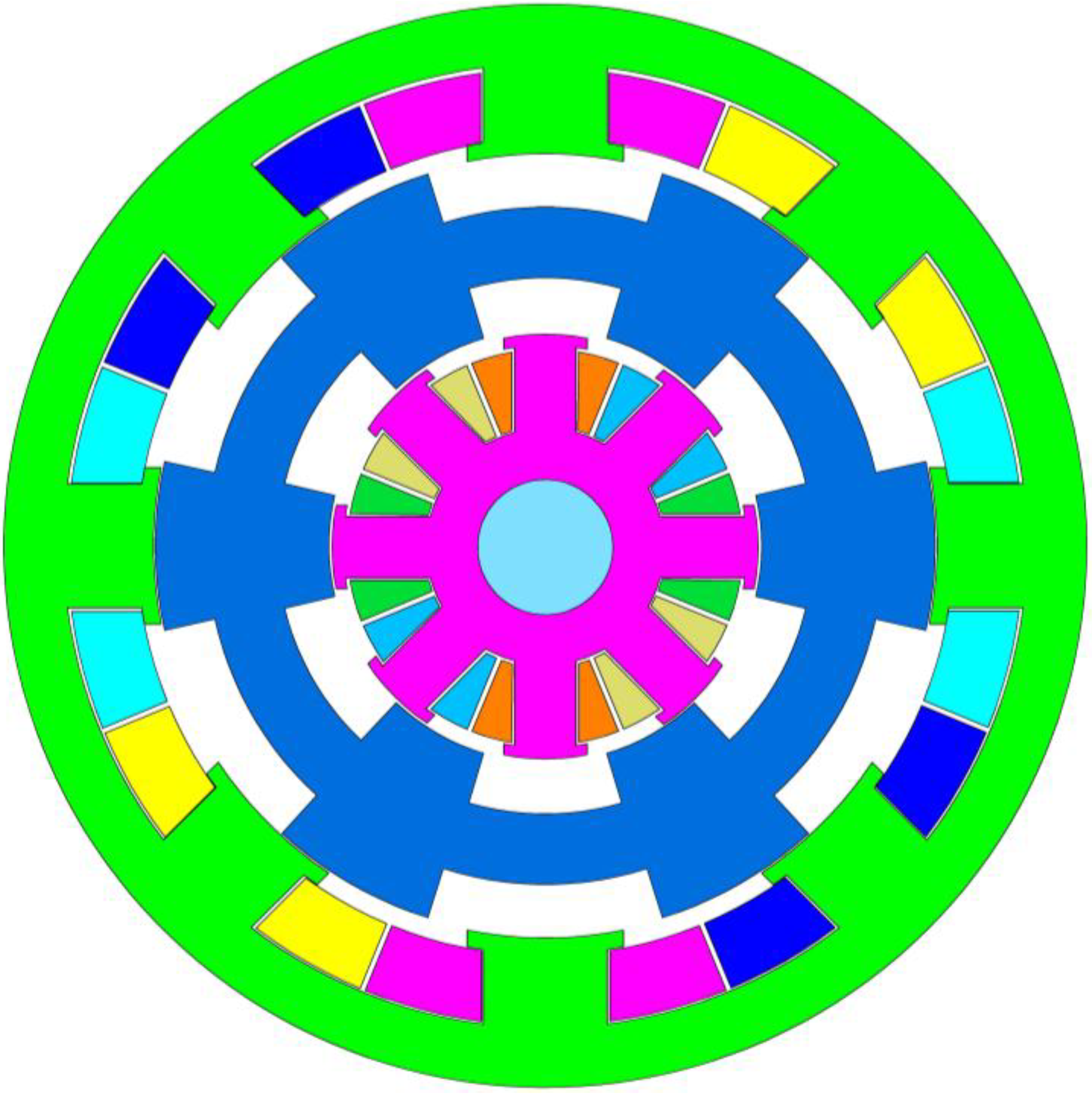
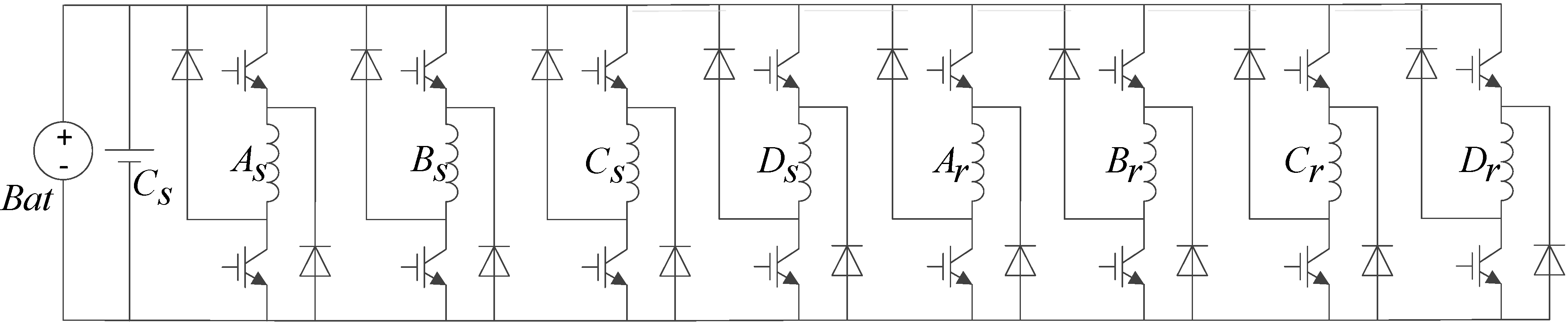
:1. Introduction


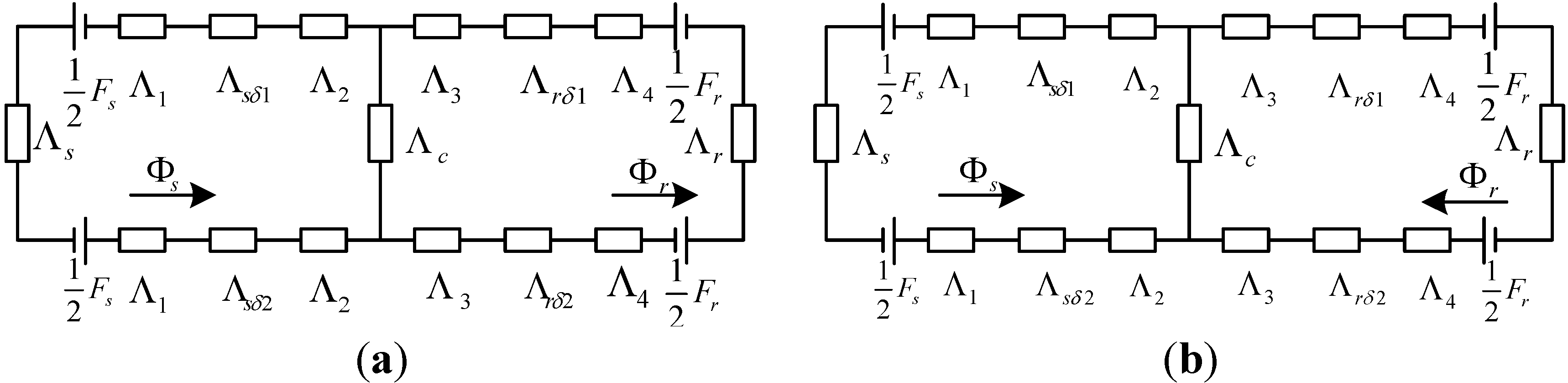
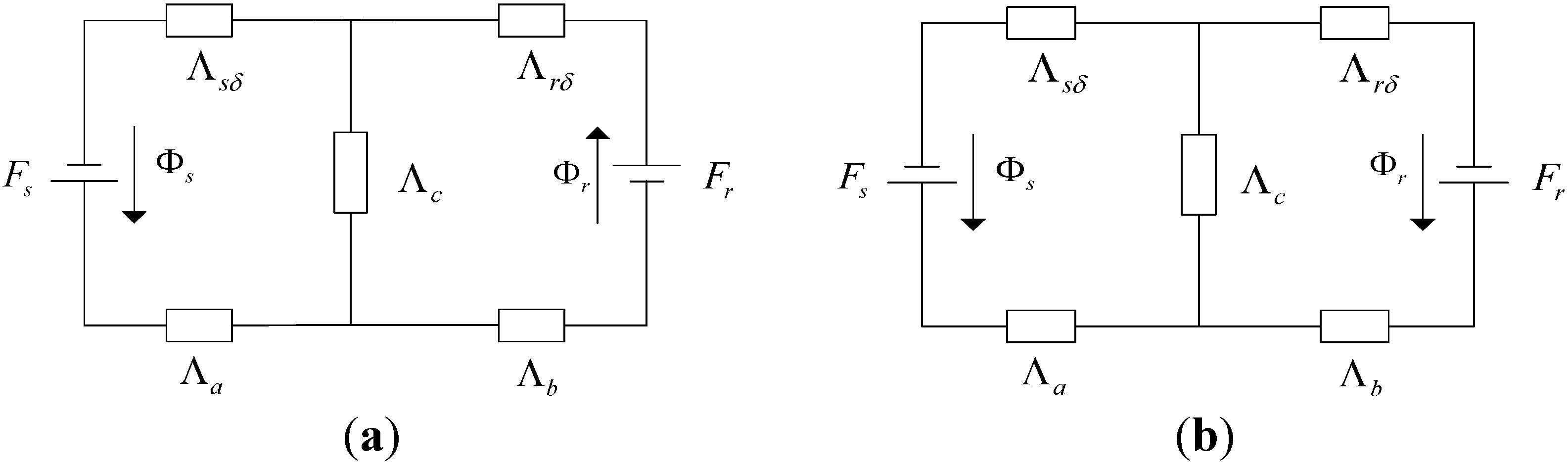
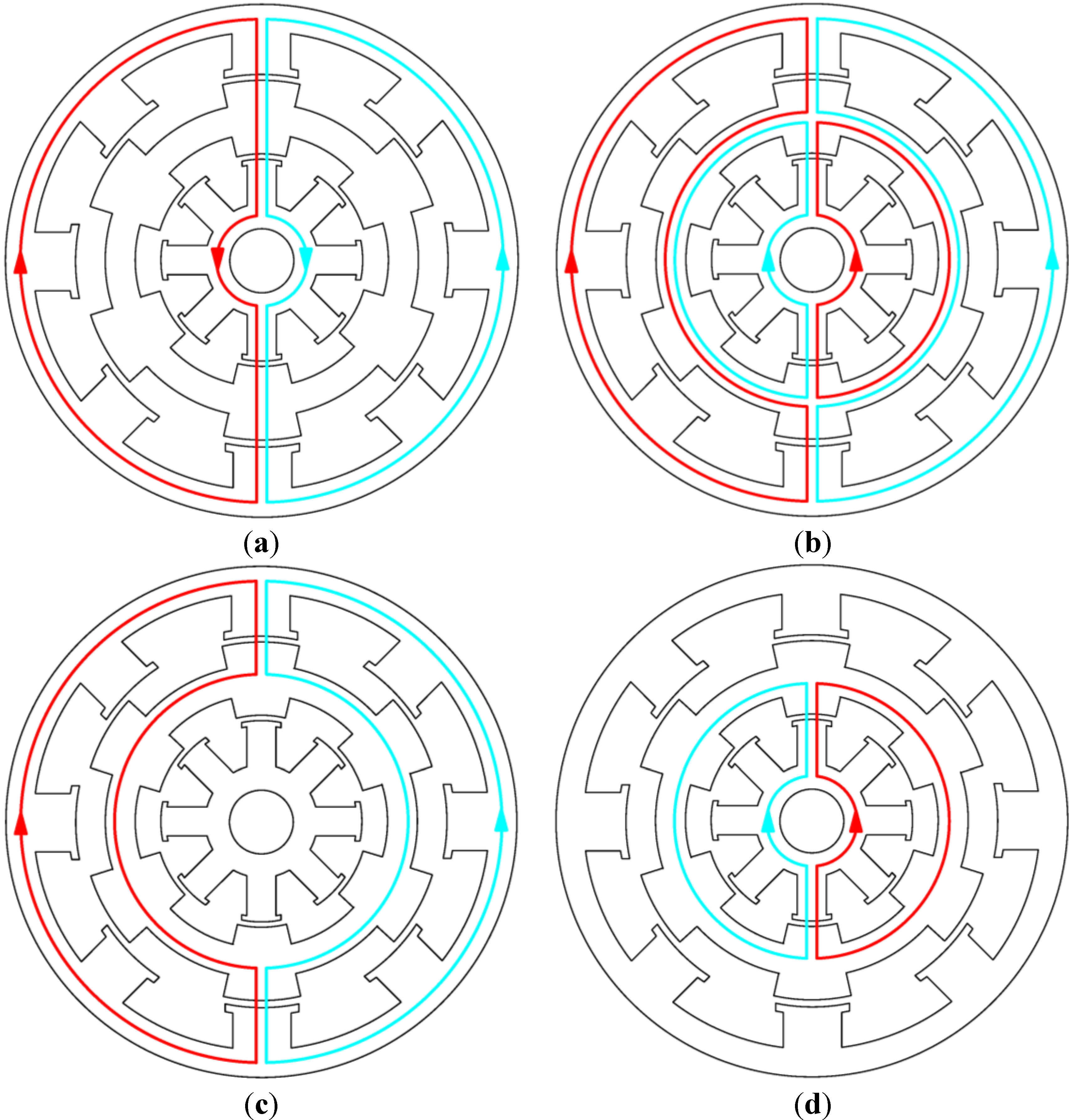
2. Magnetic Equivalent Circuit Analysis of SRDRM



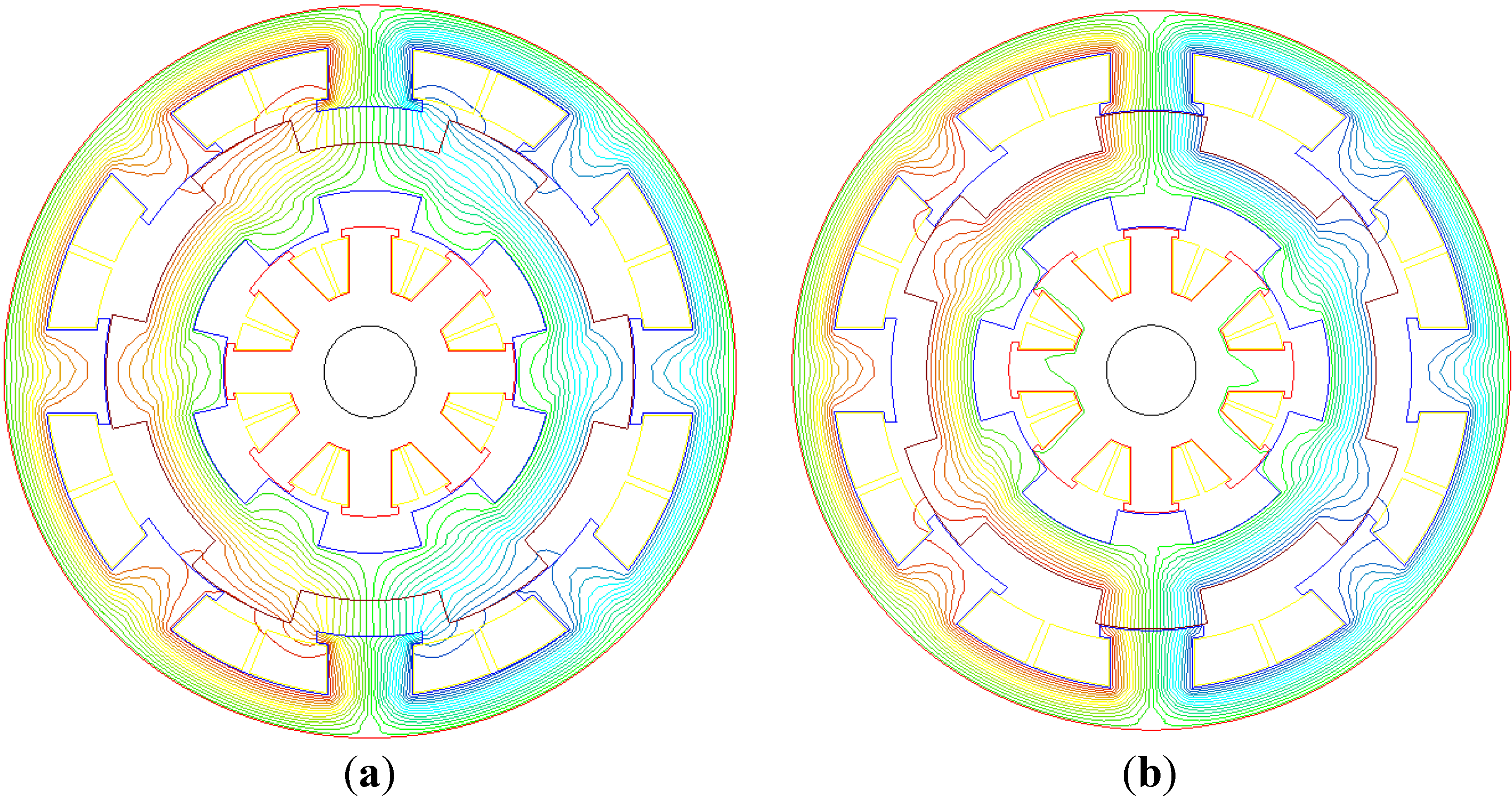
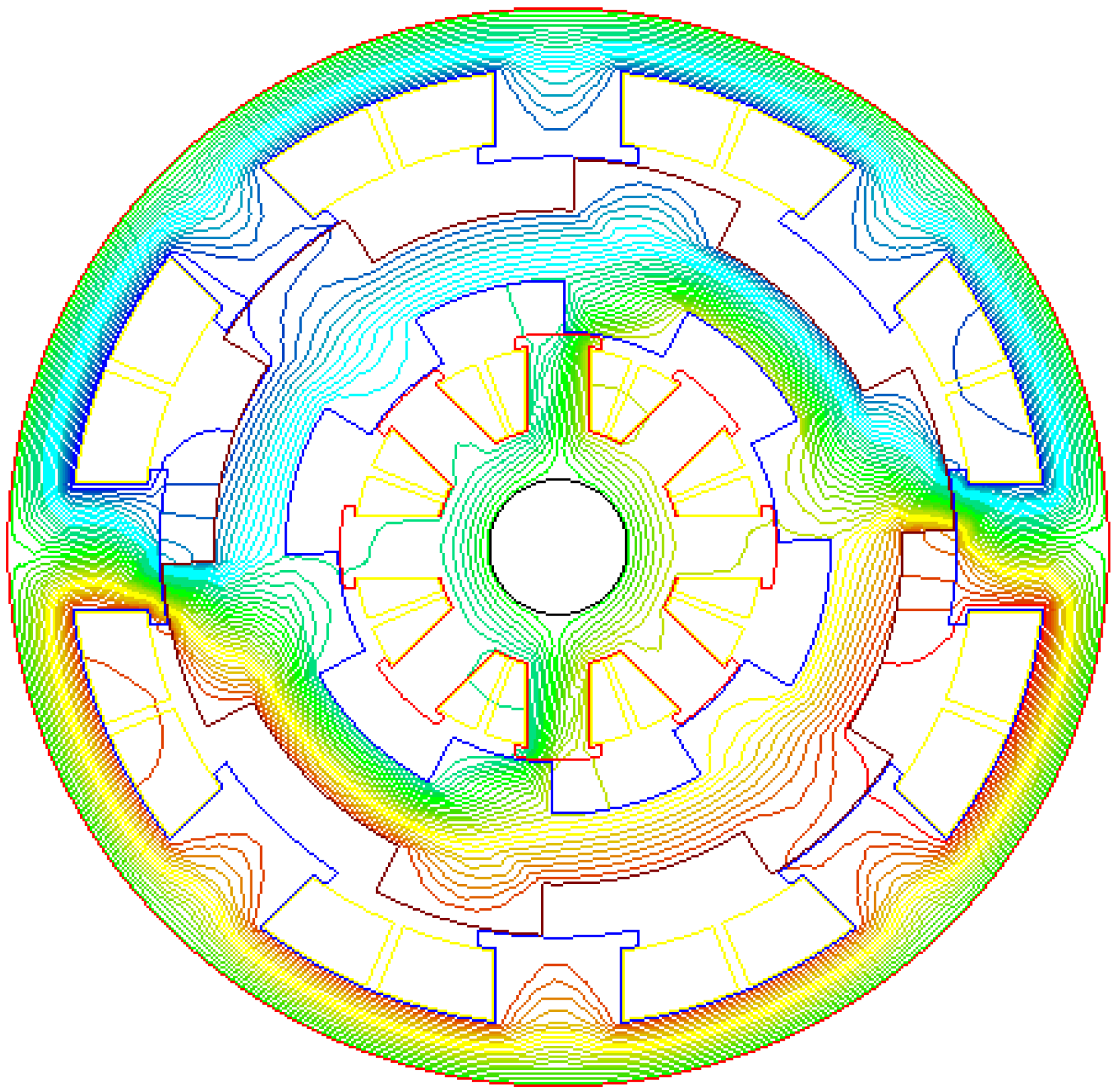
3. Finite Element Analysis of SRDRM

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Outer Motor | Inner Motor |
|---|---|---|
| Rated RMS Voltage (V) | 380 | 380 |
| Rated Power (kW) | 2.2 | 2.2 |
| Maximum Power (kW) | 4.4 | 2.2 |
| Number of Phases | 4 | 4 |
| Number of poles | 8/6 | 8/6 |
| Rated Speed (rpm) | 1500 | 1500 |
| Maximum Speed (rpm) | 3000 | 3000 |
| Air Gap (mm) | 0.4 | 0.4 |
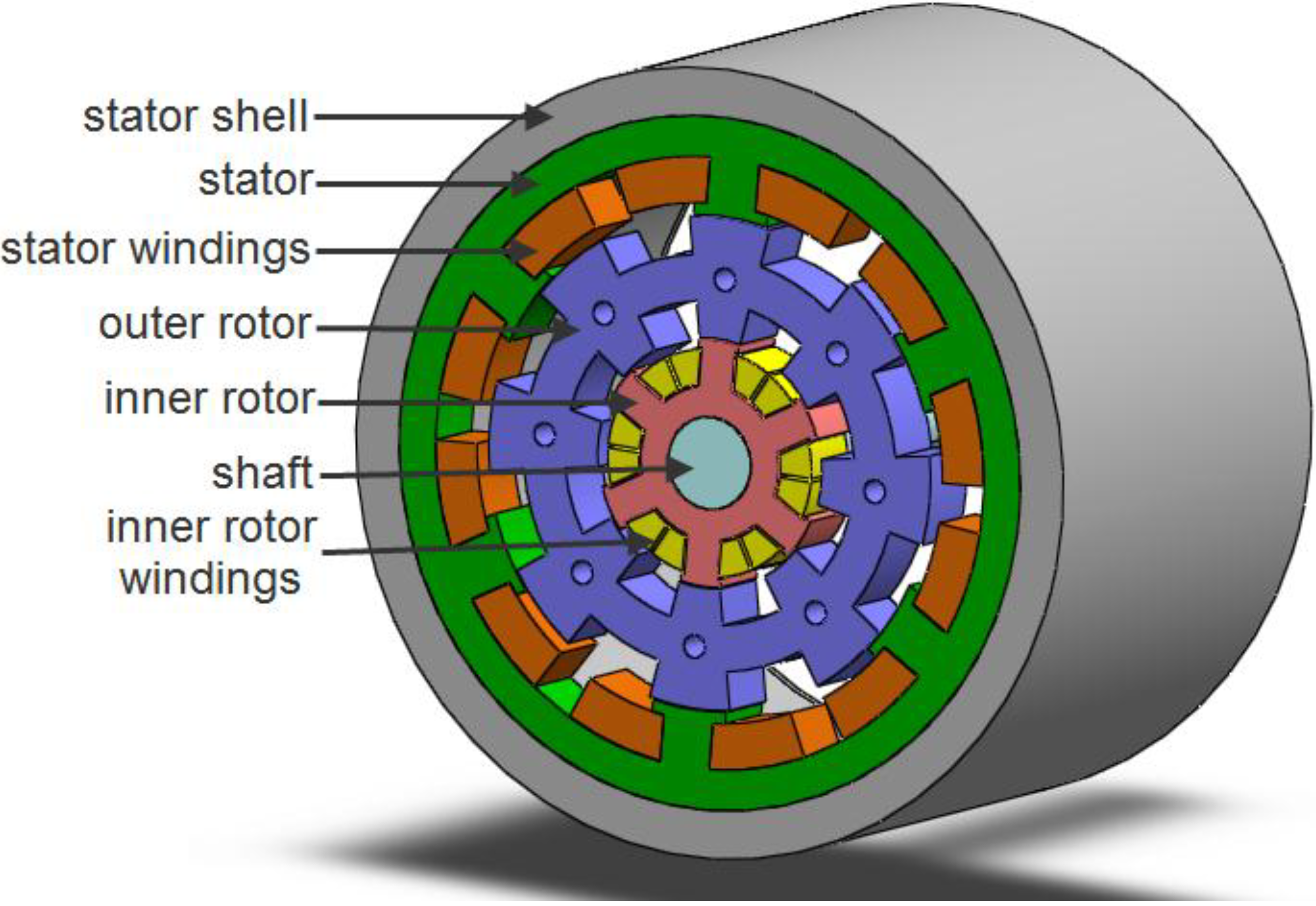
| Outer Diameter of Stator (mm) | 200 | - |
| Outer Diameter of Outer Rotor (mm) | 144 | - |
| Outer Diameter of Inner Rotor (mm) | - | 79.2 |
| Diameter of Shaft (mm) | - | 20 |
| Stator/Inner Rotor Pole Arc (°) | 23 | 23 |
| Outer Rotor Pole Arc (°) | 27 | 27 |
| Length of Core (mm) | 130 | 130 |
| Number of Turns for one phase | 84 | 74 |


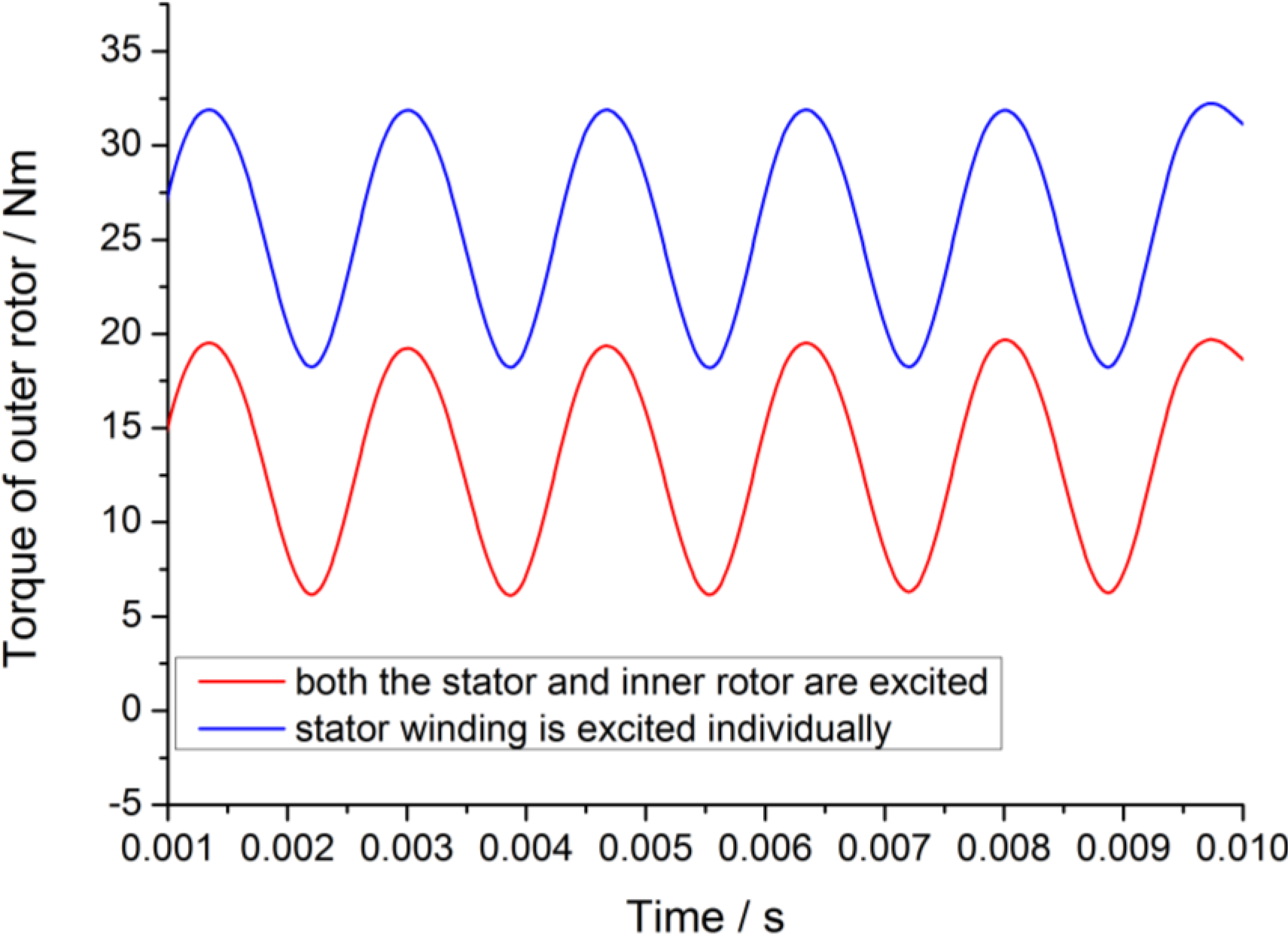
3.1. Machine Performances only the Stator Winding is Excited






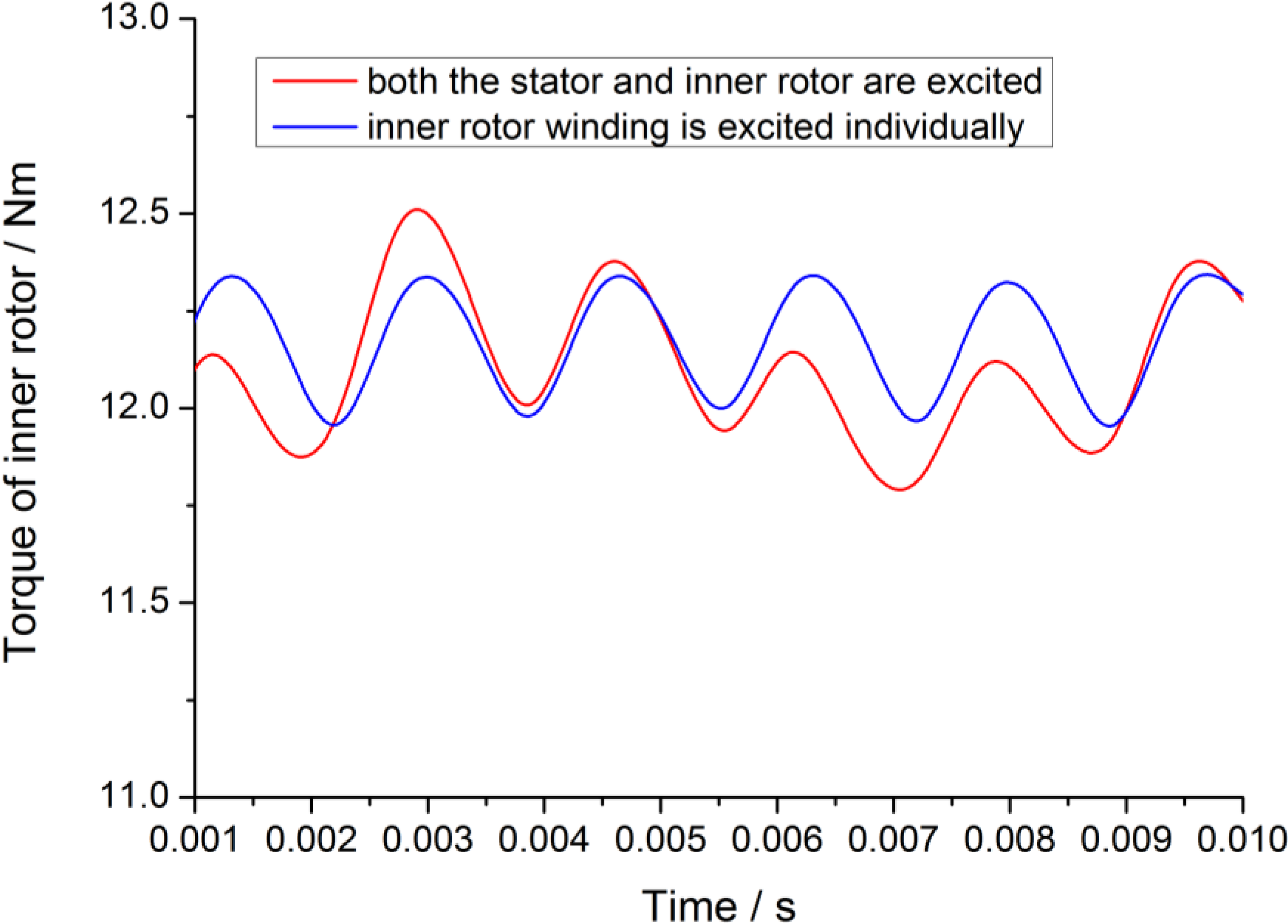
3.2. Machine Performances only the Inner Rotor Winding Is Excited


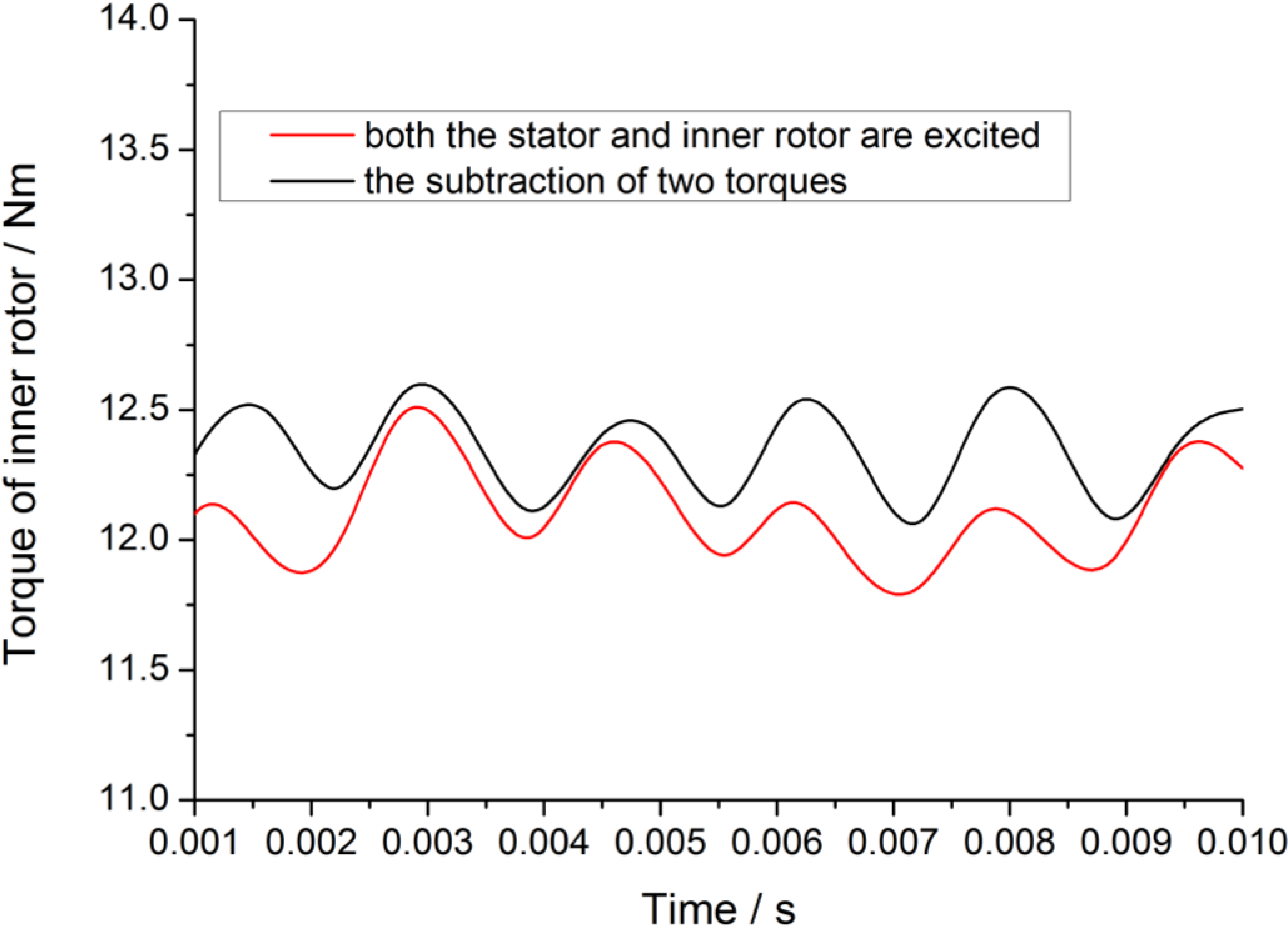
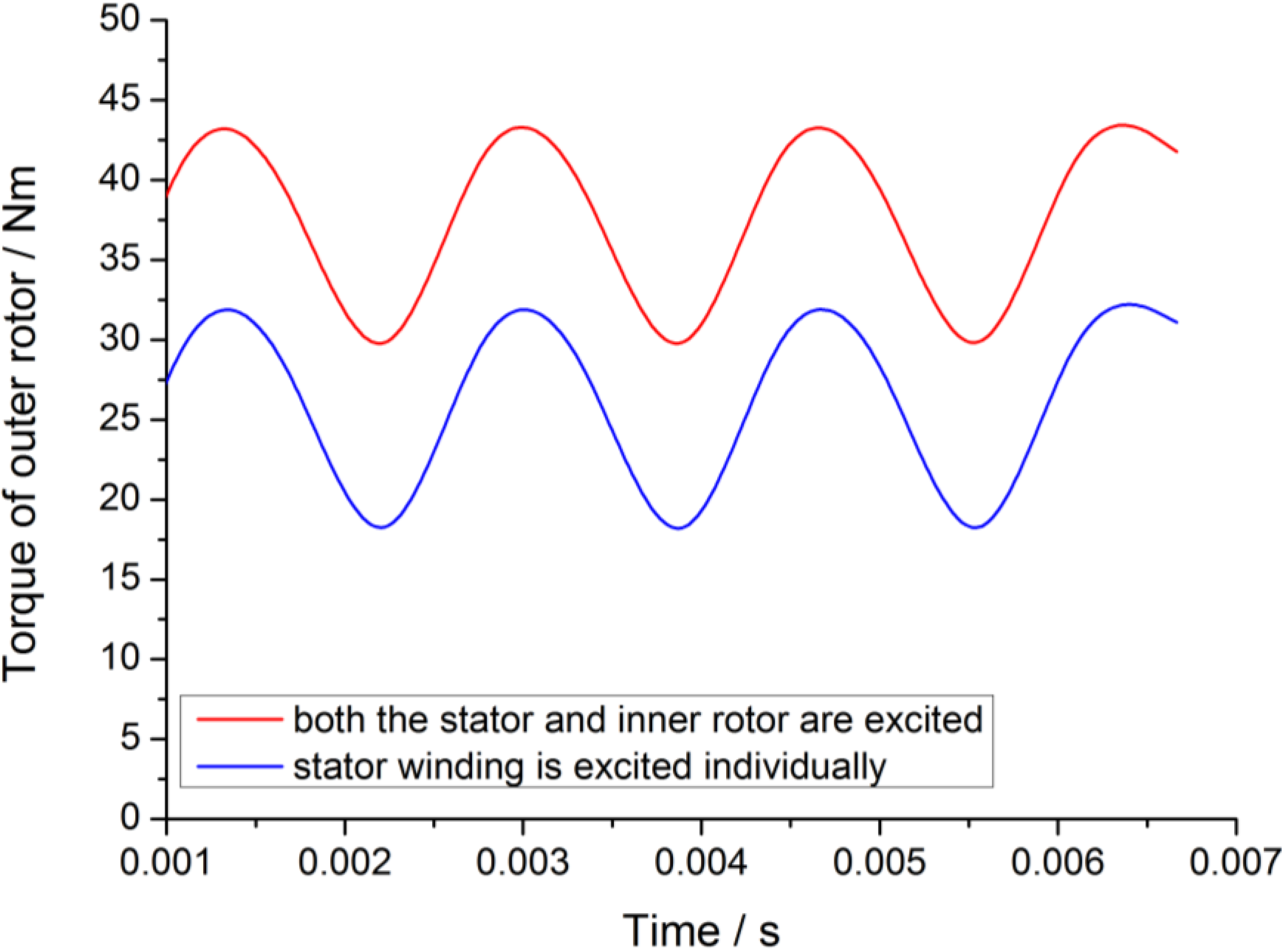
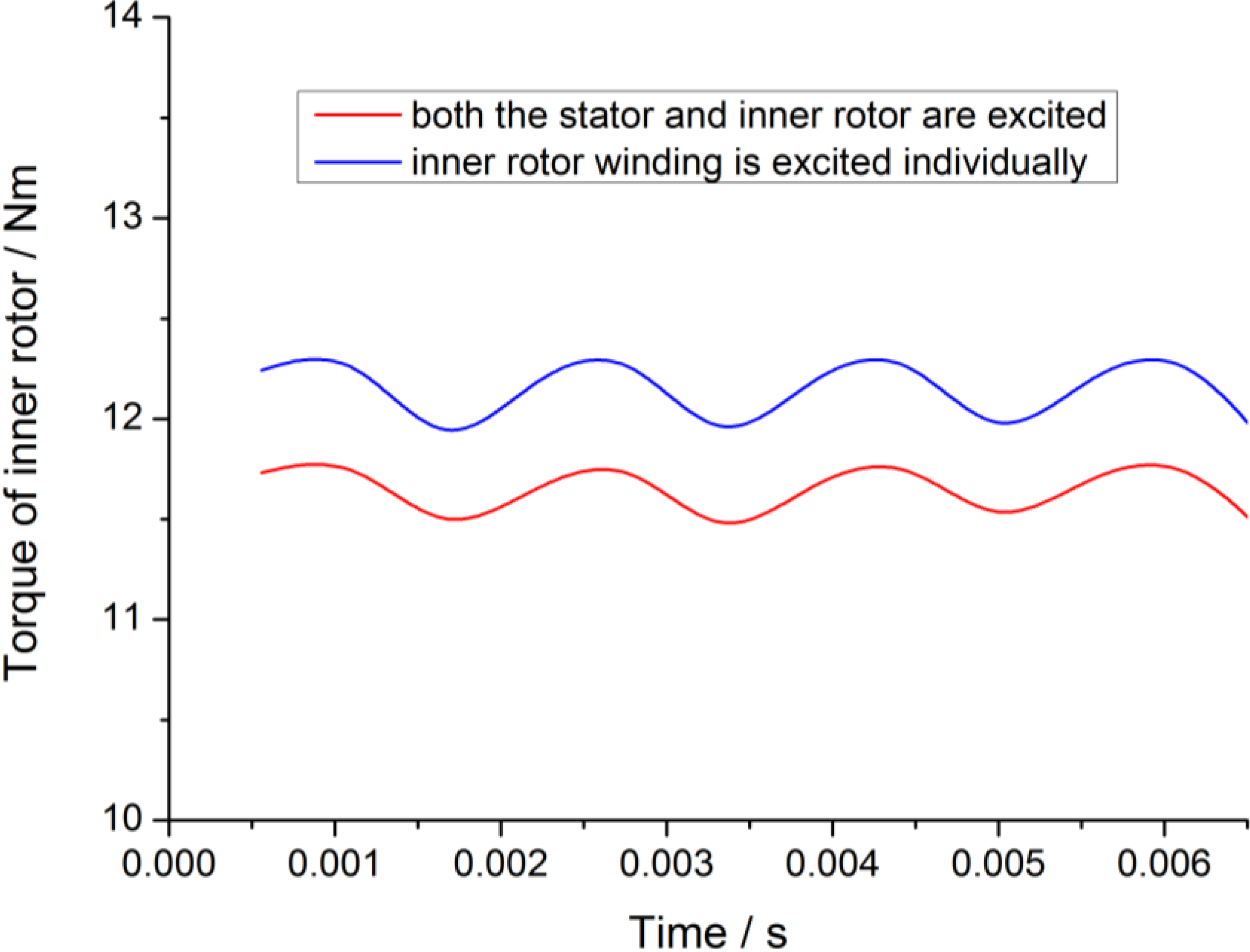
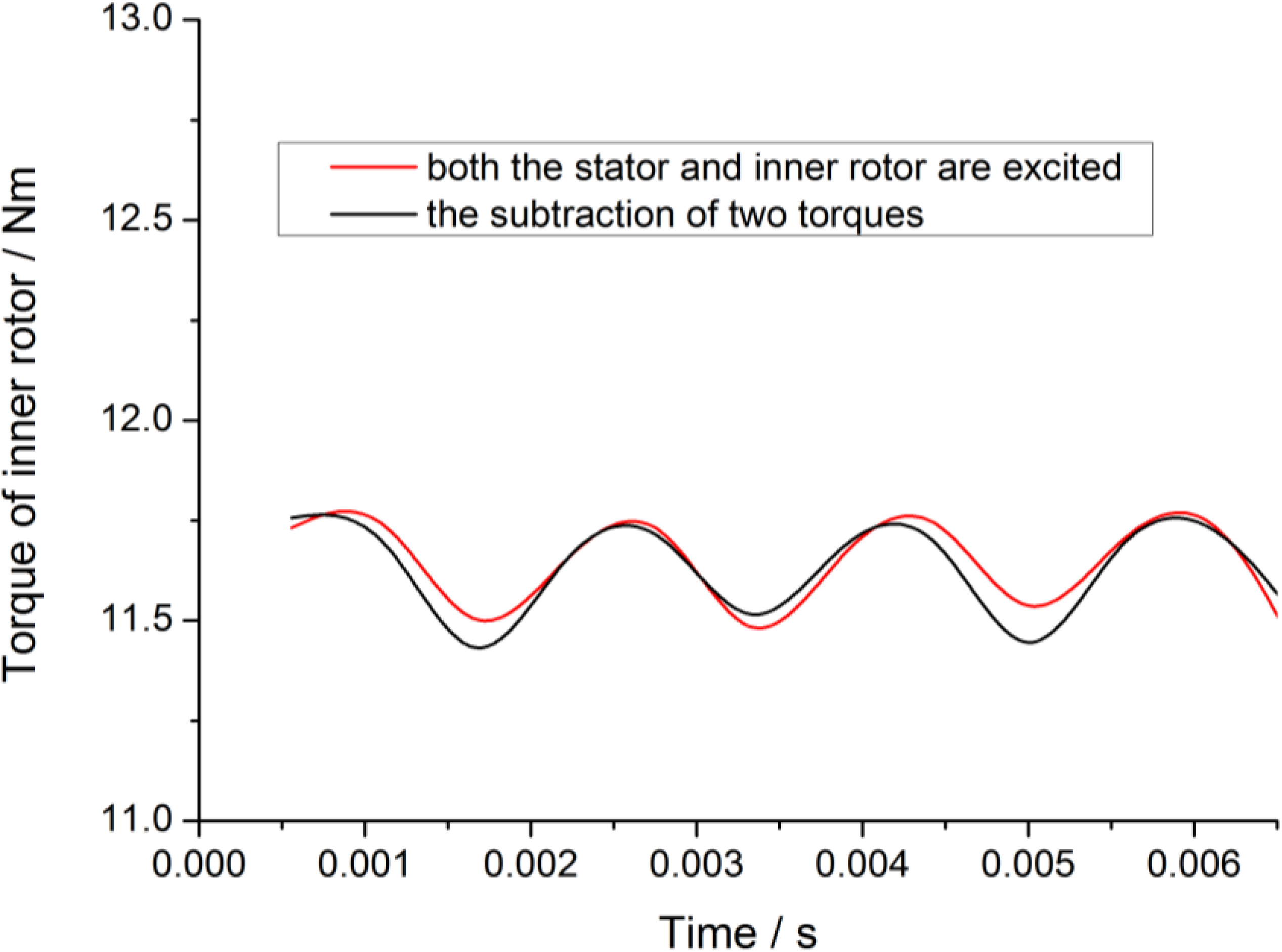
3.3. Machine Performances When Both Stator and Inner Rotor Winding Are Excited
3.3.1. The Case of Inner Rotor Rotating Clockwise Relatively





3.3.2. The Case of Inner Rotor Rotating Counterclockwise Relatively



4. Analysis of Main Parameters’ Influence on Performance
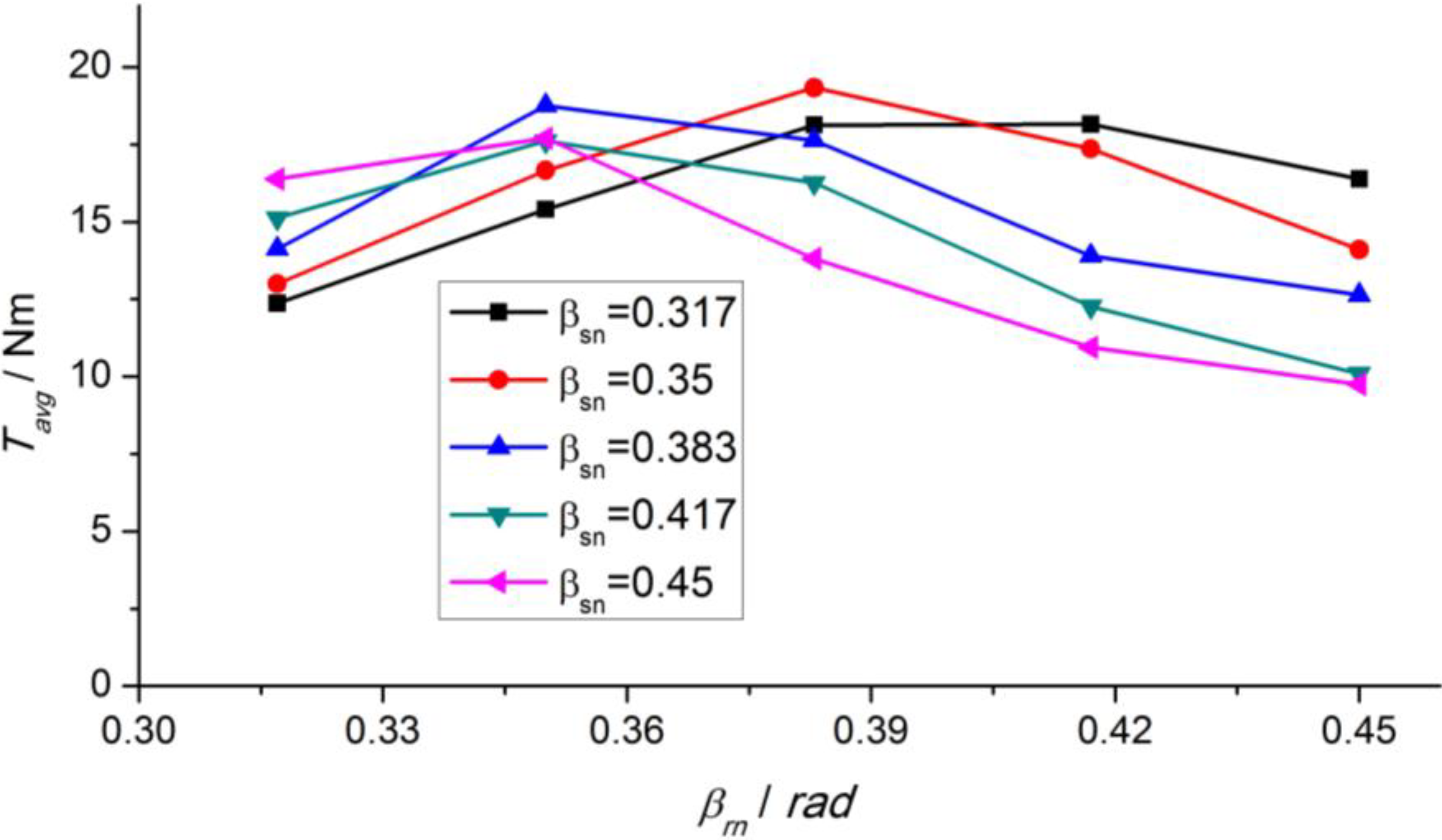
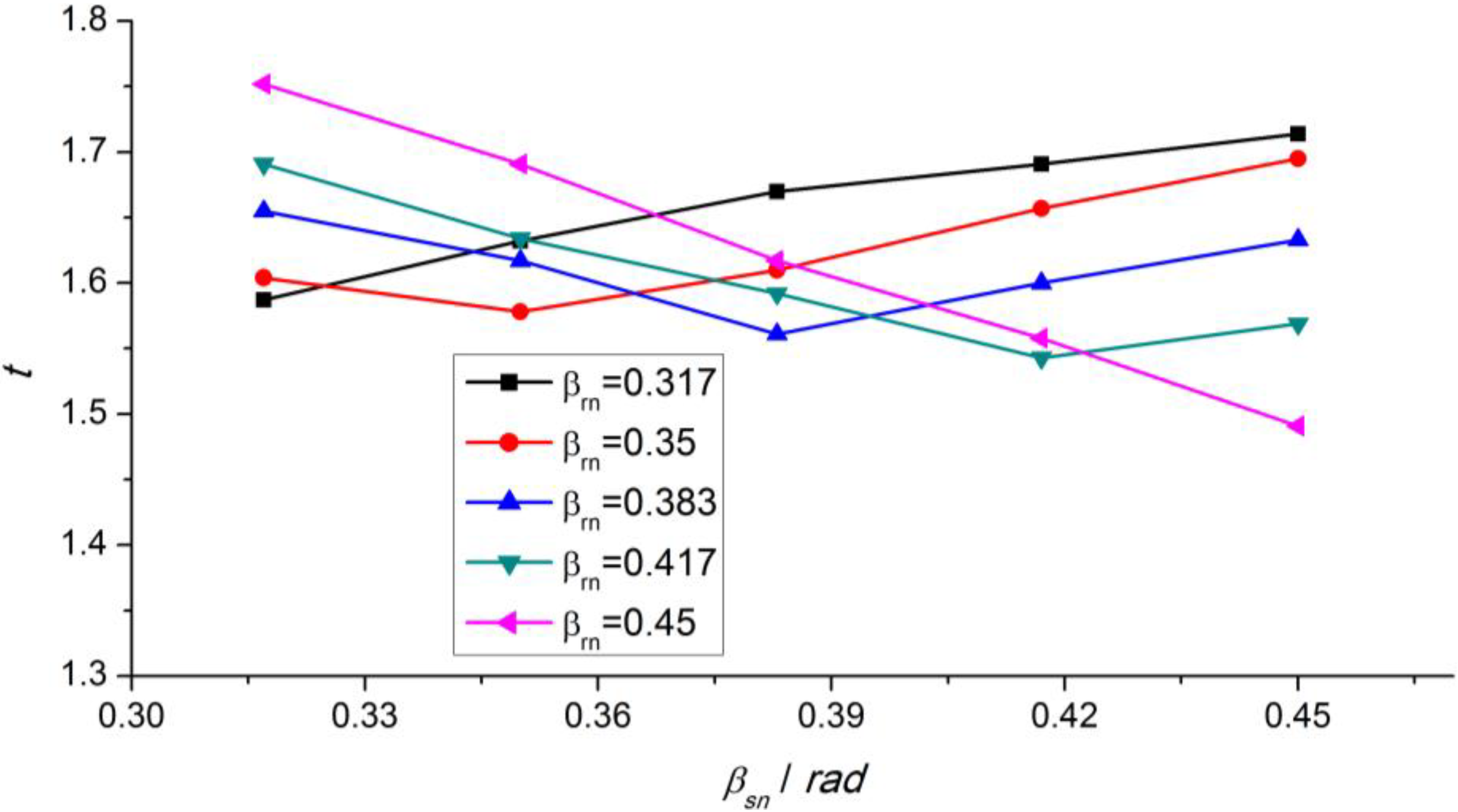
4.1. The Influence of Stator and Rotor Pole Arc on Double-Rotor Machine’s Torque


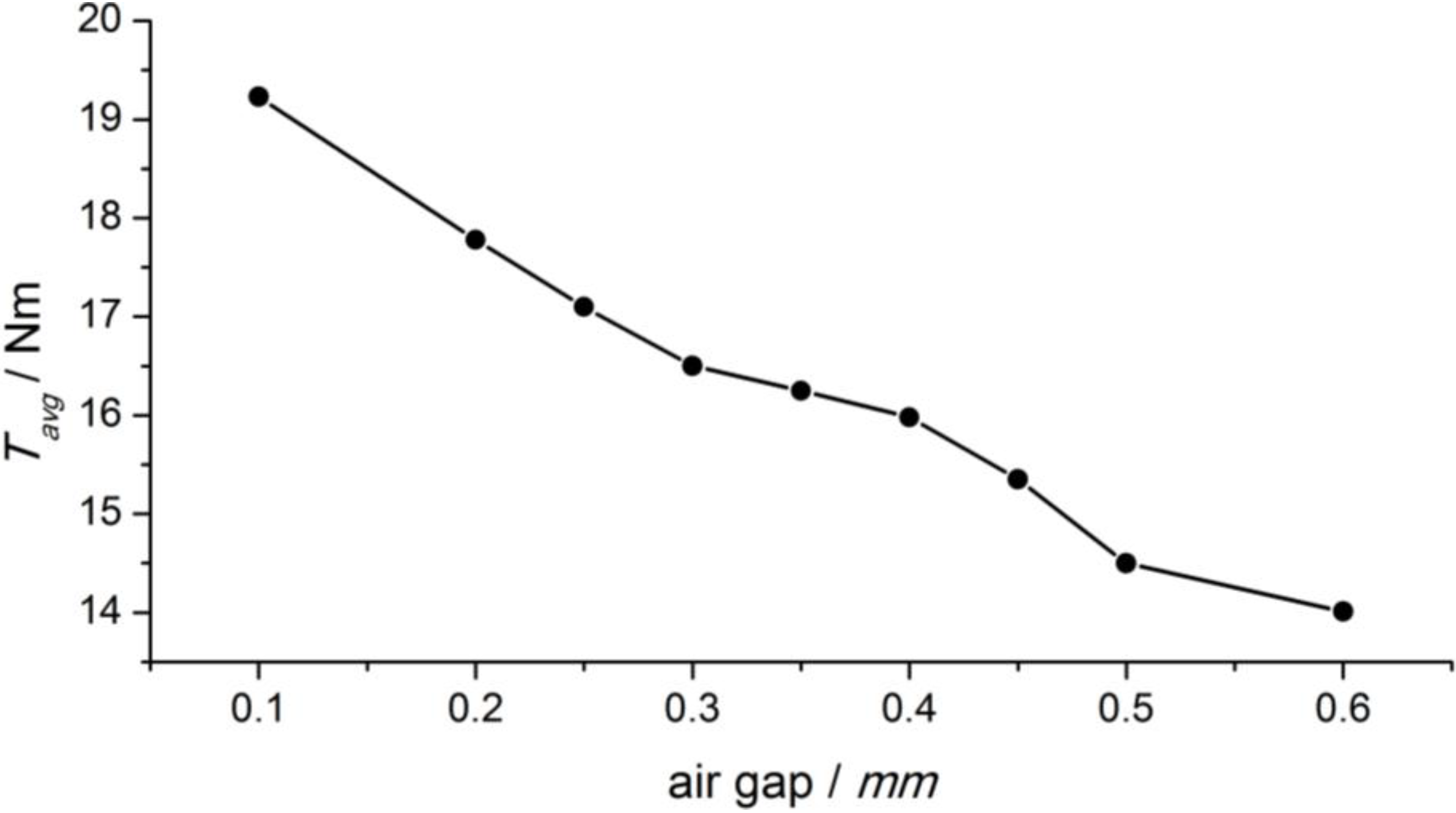
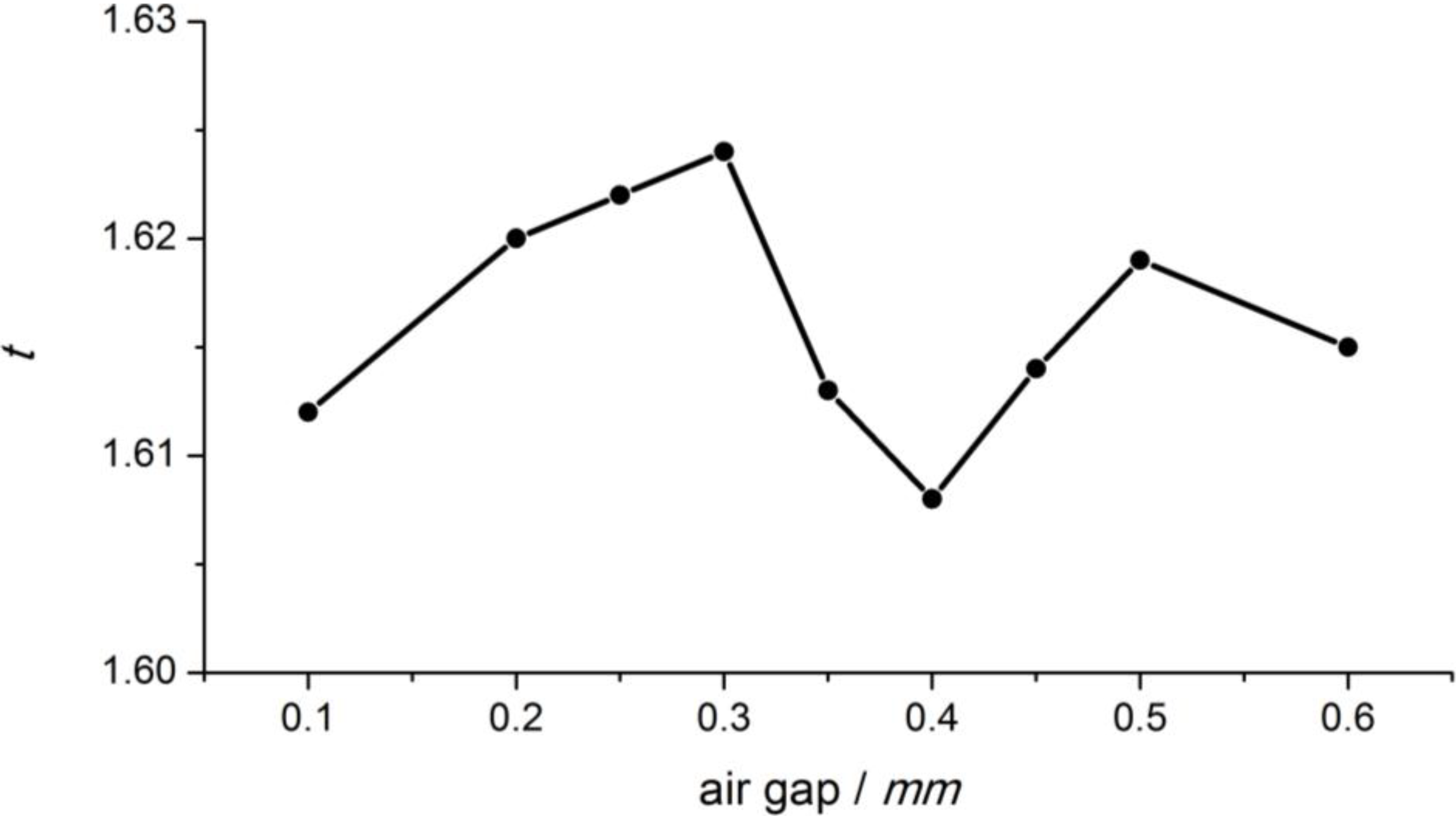
4.2. The Influence of Air Gap on the Torque of Double-Rotor Machine


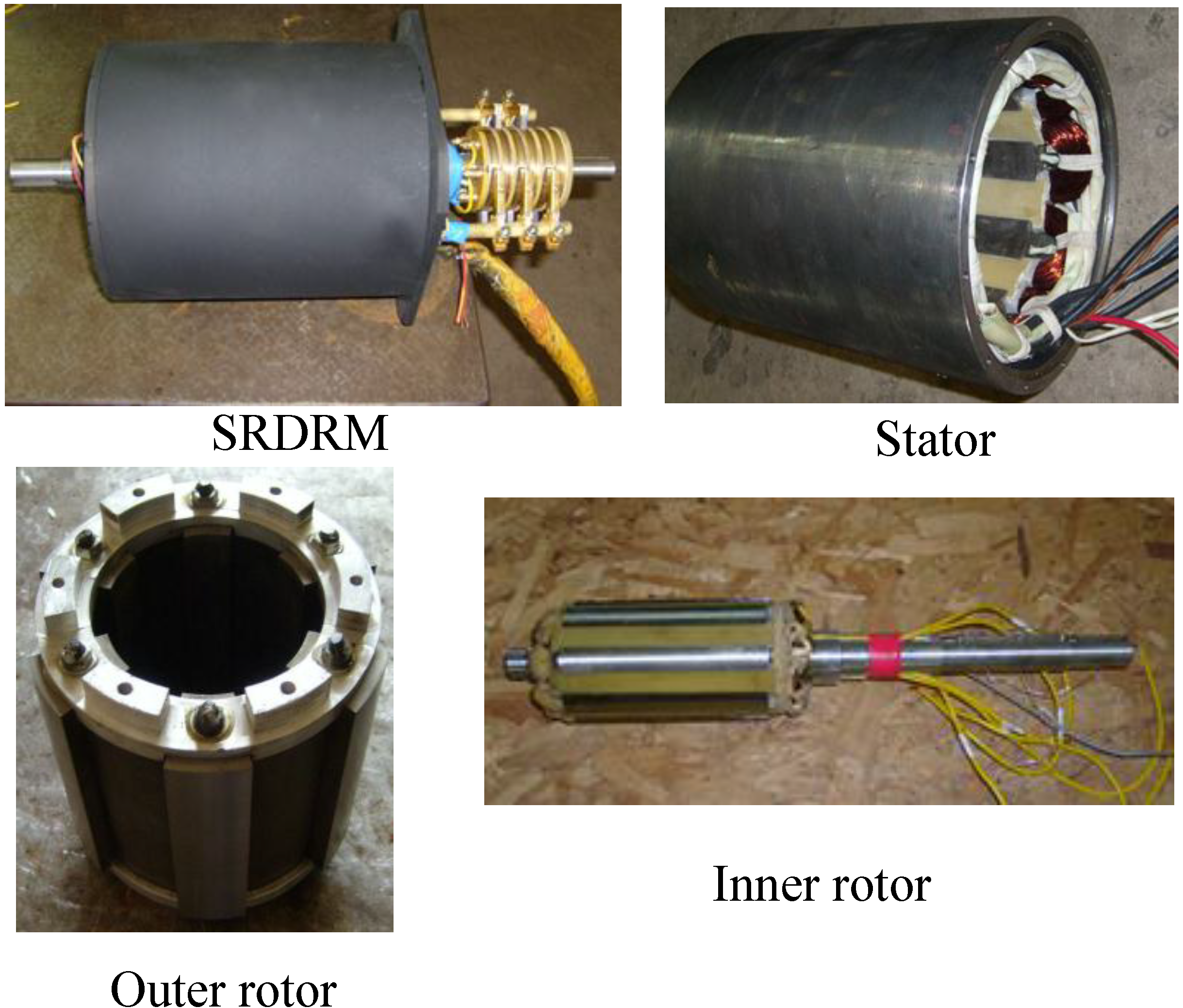
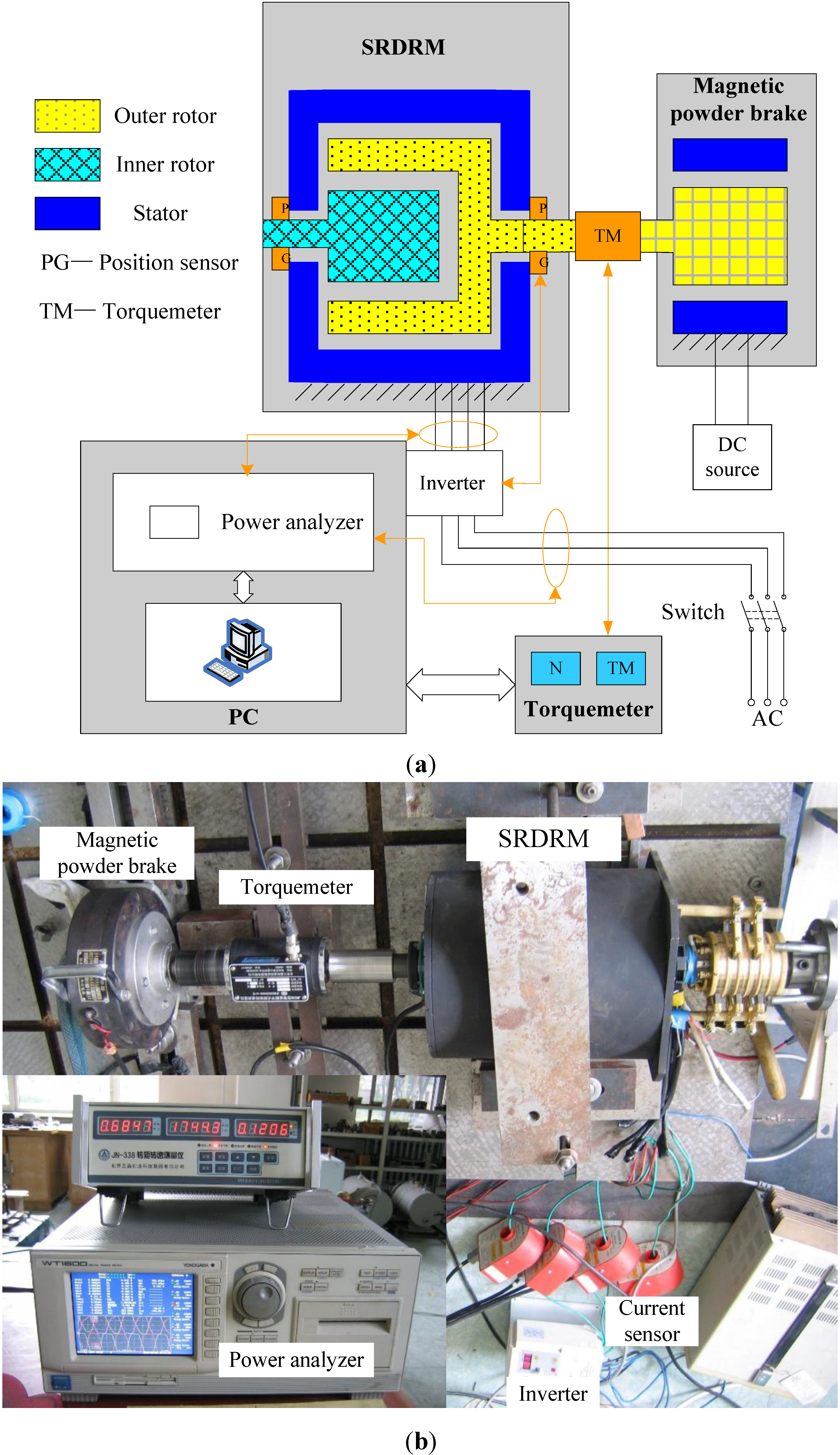
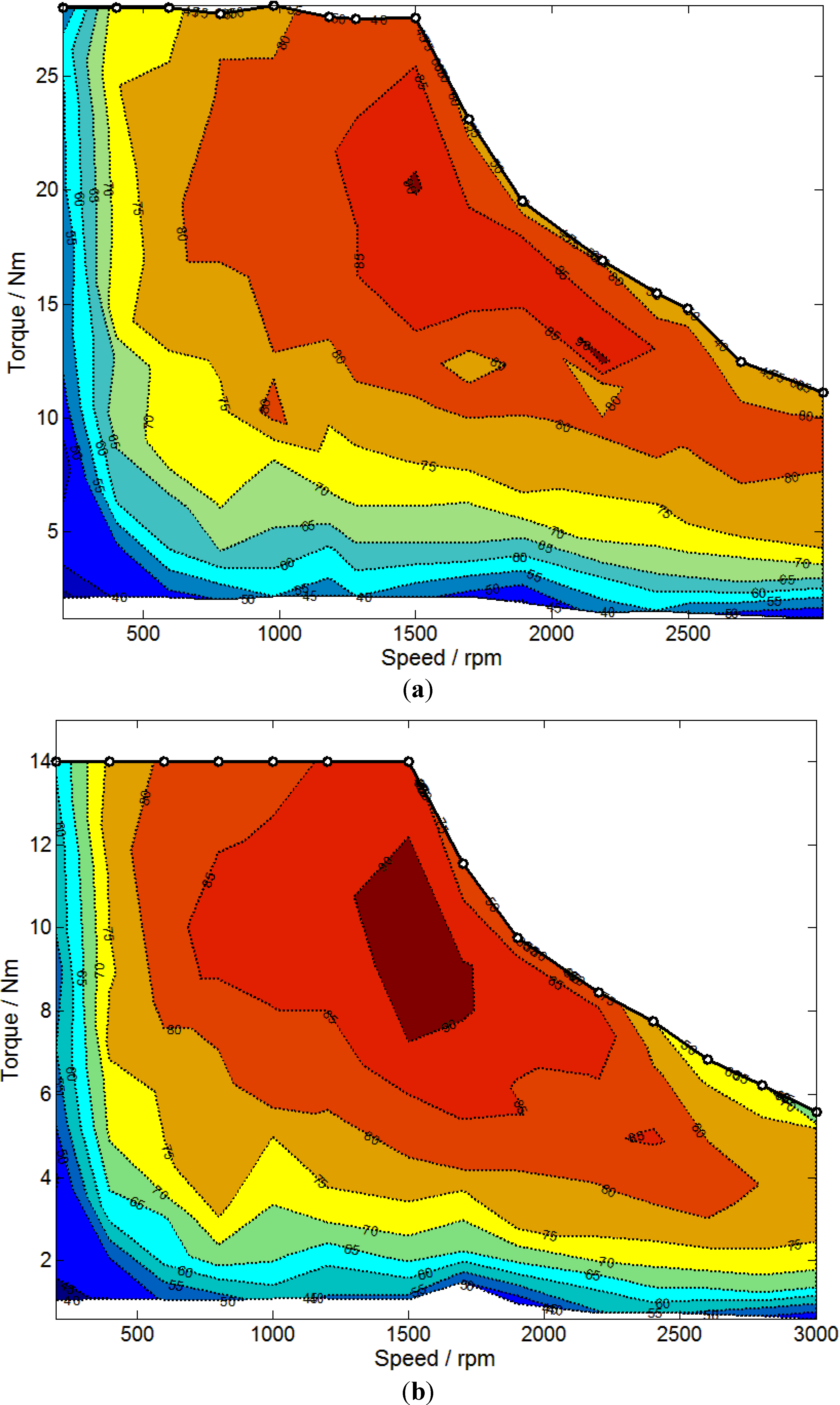
5. Experimental Results



6. Conclusions
- The SRDRM has a double salient outer rotor, on which there are no conductors or PMs, making it compact and highly reliable. Besides, the constant power speed range is much wider and the cooling problems can be effectively avoided.
- Outer rotor’s magnetic yoke occupies an important position in the electromagnetic design of double-rotor machine. A thinner yoke results in heavy interferences between the fields of stator and inner windings, while a thicker outer rotor yoke will increase the size and weight of the machine.
- For SRDRM, stator and rotor pole arc, air gap length all have a non-linear effects on average electromagnetic torque and torque ripple and they must be considered comprehensively during the design.
- IM is smaller and operates in harsh environment. When designing a SRDRM, in order to get the optimized result, the SRDRM should be designed from the inside to the outside.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hoeijmakers, M.J.; Ferreira, J.A. The electric variable transmission. IEEE Trans. Ind. Appl. 2006, 42, 1092–1100. [Google Scholar] [CrossRef]
- Chau, K.T.; Chan, C.C.; Liu, C. Overview of permanent-magnet brushless drives for electric and hybrid electric vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2246–2257. [Google Scholar] [CrossRef] [Green Version]
- Xu, L. Dual-mechanical-port electric machines-concept and application of a new electric. IEEE Trans. Ind. Appl. 2009, 15, 44–51. [Google Scholar]
- Cheng, Y.; Cui, S.; Song, L.; Chan, C.C. The study of the operation modes and control strategies of an advanced electromechanical converter for automobiles. IEEE Trans. Magn. 2007, 43, 30–433. [Google Scholar]
- Zheng, P.; Liu, R.; Thelin, P.; Nordlund, E.; Sadarangani, C. Research on the parameters and performances of a 4QT prototype machine used for HEV. IEEE Trans. Magn. 2007, 43, 443–446. [Google Scholar] [CrossRef]
- Zheng, P.; Liu, R.; Wu, Q.; Zhao, J.; Yao, Z. Magnetic coupling analysis of four-quadrant transducer used for hybrid electric vehicles. IEEE Trans. Magn. 2007, 43, 2597–2599. [Google Scholar] [CrossRef]
- Zheng, P.; Liu, R.; Thelin, P.; Nordlund, E.; Sadarangani, C. Research on the cooling system of a 4QT prototype machine used for HEV. IEEE Trans. Energy Convers. 2008, 23, 61–66. [Google Scholar] [CrossRef]
- Niu, S.; Ho, S.L.; Fu, W.N. A novel double-stator double-rotor brushless electrical continuously variable transmission system. IEEE Trans. Magn. 2013, 49, 3909–3912. [Google Scholar] [CrossRef]
- Cui, S.; Yuan, Y.; Wang, T. Research on switched reluctance double-rotor motor used for hybrid electric vehicle. In Proceedings of the International Conference on Electrical Machines and Systems (ICEMS), Wuhan, China, 17–20 October 2008; pp. 3393–3396.
- Chen, Y.; Li, Q.; Zhu, X.; Wei, H.; Zheng, W. Electromagnetic performance analysis of double-rotor stator permanent magnet motor for hybrid electric vehicle. IEEE Trans. Magn. 2012, 48, 4204–4207. [Google Scholar] [CrossRef]
- Anekunu, A.Y.; Chowdhury, S.P.; Chowdhury, S. A review of research and development on switched reluctance motor for electric vehicles. In Proceedings of the IEEE Power and Energy Society General Meeting (PES), Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5.
- Kokernak, J.M.; Torrey, D.A. Magnetic circuit model for the mutually coupled switched reluctance machine. IEEE Trans. Magn. 2000, 36, 500–507. [Google Scholar] [CrossRef]
- Sozer, Y.; Torrey, D.A. Optimal turn-off angle control in the face of automatic turn-on angle control for switched-reluctance motors. IET Electr. Power Appl. 2007, 1, 395–401. [Google Scholar] [CrossRef]
- Wei, W.; Dunlop, J.B.; Collocott, S.J.; Kalan, B.A. Design optimization of a switched reluctance motor by electromagnetic and thermal finite-element analysis. IEEE Trans. Magn. 2003, 39, 3334–3336. [Google Scholar] [CrossRef]
- Kosaka, T.; Kume, A.; Wakayama, H.; Matsui, N. Development of high torque density and efficiency switched reluctance motor with 0.1 mm short airgap. In Proceedings of the IEEE European Conference on Power Electronics and Applications (EPE), Aalborg, Denmark, 2–5 September 2007; pp. 1–9.
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, S.; Cui, S.; Song, L.; Chan, C.C. Electromagnetic Analysis and Design of Switched Reluctance Double-Rotor Machine for Hybrid Electric Vehicles. Energies 2014, 7, 6665-6688. https://doi.org/10.3390/en7106665
Han S, Cui S, Song L, Chan CC. Electromagnetic Analysis and Design of Switched Reluctance Double-Rotor Machine for Hybrid Electric Vehicles. Energies. 2014; 7(10):6665-6688. https://doi.org/10.3390/en7106665
Chicago/Turabian StyleHan, Shouliang, Shumei Cui, Liwei Song, and Ching Chuen Chan. 2014. "Electromagnetic Analysis and Design of Switched Reluctance Double-Rotor Machine for Hybrid Electric Vehicles" Energies 7, no. 10: 6665-6688. https://doi.org/10.3390/en7106665
APA StyleHan, S., Cui, S., Song, L., & Chan, C. C. (2014). Electromagnetic Analysis and Design of Switched Reluctance Double-Rotor Machine for Hybrid Electric Vehicles. Energies, 7(10), 6665-6688. https://doi.org/10.3390/en7106665