1. Introduction
Electric vehicles (EVs) have rapidly developed in the past few years due to the increasing cost of energy and global warming constraints. A battery management system (BMS) is important for EVs to safeguard the battery performance and extend its life [
1]. An accurate state of charge (SOC) estimation is the most key technique in a BMS, since it indicates the remaining energy in the battery, which is helpful to prevent the battery from over-charging or over-discharging, which may damage the battery. The simplest definition of SOC is the ratio between the remaining capacity of the battery and its nominal capacity. However, it is difficult to get an accurate value of SOC, because the SOC cannot be directly measured with sensors and is closely related to various factors, such as ambient temperature, current rate and battery aging.
Numerous SOC estimation approaches have been proposed with the development of EVs, and each with its own advantages and disadvantages. A most commonly used method in practice is the Ampere-hour (Ah) counting (or Coulomb counting) method [
2,
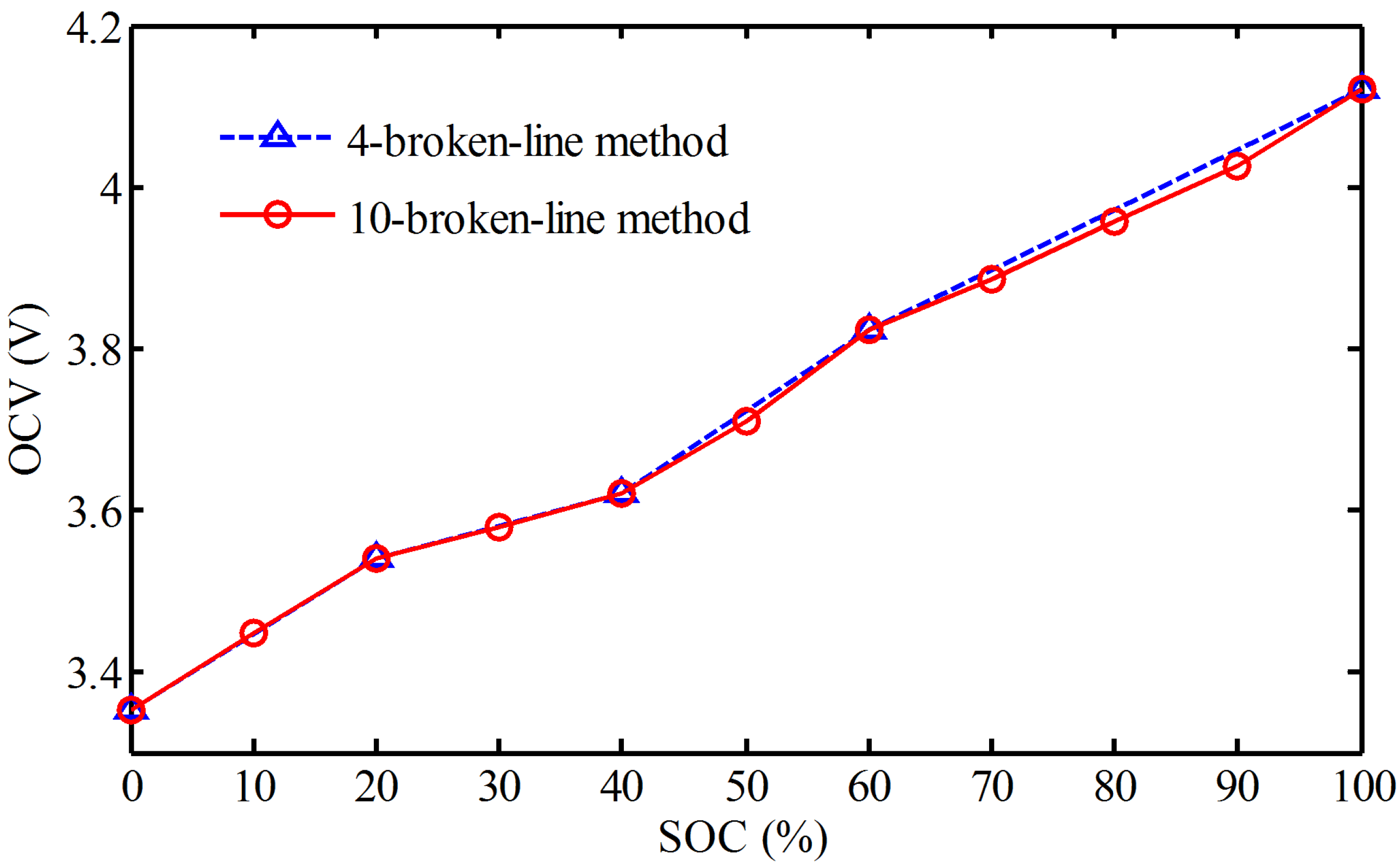
3]. The Ah method obtains the remaining capacity of a battery by integrating the current over the time. It is simple and can be easily implemented on-board, because it only needs to measure the battery operating current and does not need complex computations. However, this method can easily cause accumulated calculation errors due to uncertain disturbances in the current measurement process and a lack of correction for the initial SOC offset. The open-circuit voltage (OCV) method estimates the SOC according to the relationship between the OCV and the SOC [
4,
5]. Nevertheless, it is not suitable for online estimation due to the long rest time to reach the steady-state of the battery. Computational intelligence algorithms, such as artificial neural networks (ANNs) [
6,
7,
8], fuzzy-logic [
9,
10,
11], and support vector machines (SVMs) [
12,
13] have also been developed to estimate the SOC. These methods do not require detailed knowledge of the battery systems, thus, they can be applied to all battery types and have excellent estimation performance if the training data is sufficient to cover all loading conditions. However, it is time consuming and nearly impossible to collect training data that can cover all possible loading conditions. Besides, all the aforementioned methods are open-loop estimation algorithms and do not require the battery model.
Additional efforts have been focused on model-based and closed-loop estimation methods, including the Kalman filter (KF) [
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38] and sliding mode observer (SMO) [
39,
40,
41,
42,
43]. Despite requiring a higher computation cost than the A·h method, these methods have merits in being self-correcting and involving online computing as well as the availability of the dynamic SOC estimation error range. Thus, they are increasingly popular and more suitable for real-time application than the other types of SOC estimation methods. To expand the application of KF in nonlinear battery systems, the Extended KF (EKF) and Unscented KF (UKF) have been developed. The EKF-based methods have been widely used for battery SOC estimation [
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27]. However, the application of EKF in practice has some shortcomings. For example, the linearizing process causes large linearization errors and complicated computation of the Jacobian matrix that may lead to instability of the filter and inaccurate estimation for highly nonlinear battery systems [
30]. The UKF has been demonstrated to have a higher accuracy in estimating the mean and the error covariance of the state vector than EKF, and it does not need the complicated computation of the Jacobian matrix [
28,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38]. On the other hand, in KF algorithms, the process and measurement noise covariances are critical for the filtering performance and stability. In both EKF and UKF, constant values of the process and measurement noise covariances usually need to be pre-specified by a trial-and-error method which is time consuming, laborious and error-prone [
30]. Too small values of the process noise covariance and/or the measurement noise covariance at the beginning of the estimation process may result in a tight uncertainty tube around the true value and a biased solution, while too large values may lead to filter divergence [
44]. For the battery SOC estimation, inappropriate values of the noise covariances will cause large estimation errors. Therefore, an adaptive unscented Kalman filter (AUKF) was developed in [
30] to improve the SOC estimation accuracy by adaptively updating the process and measurement noise covariances based on the output voltage residual sequence of the battery model.
More recently, the SMO-based SOC estimation approaches have been developed to handle the battery model uncertainties, external disturbances and measurement noises [
39,
40,
41,
42]. Nevertheless, these methods rely on details about the battery dynamics for the appropriate selection of SMO parameters, such as uncertainty boundaries and switching gains, which may lead to the trade-off between the chattering magnitude and the convergence speed in the SOC estimation [
43]. To overcome such a problem, an adaptive sliding mode observer (ASMO) for the SOC estimation has been proposed in [
43]. Compared with the traditional SMO, the ASMO is able to dynamically adjust the switching gains in response to the tracking errors, and guarantee the reachability of sliding mode surface and trigger the sliding mode, thereby improving the SOC estimation accuracy.
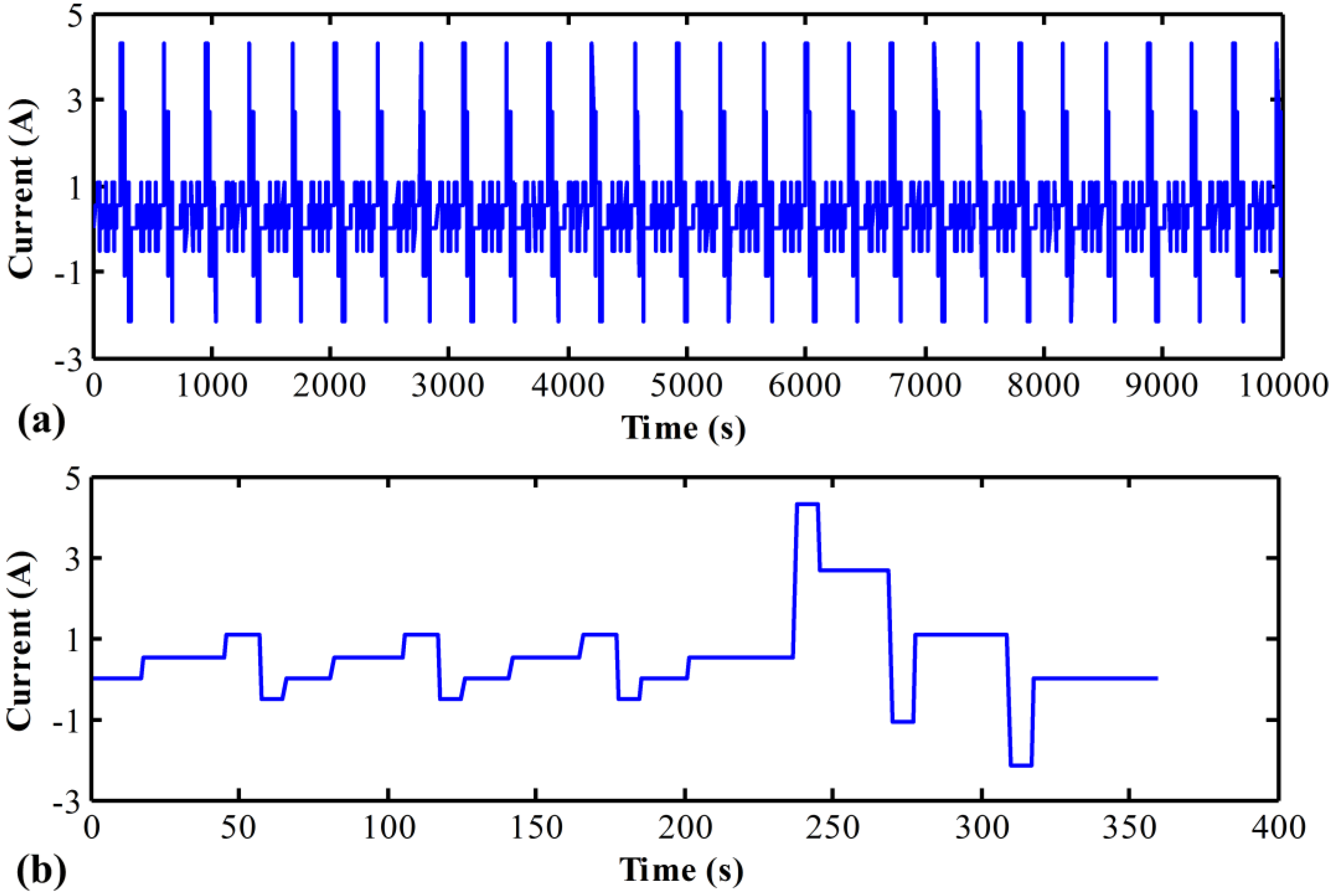
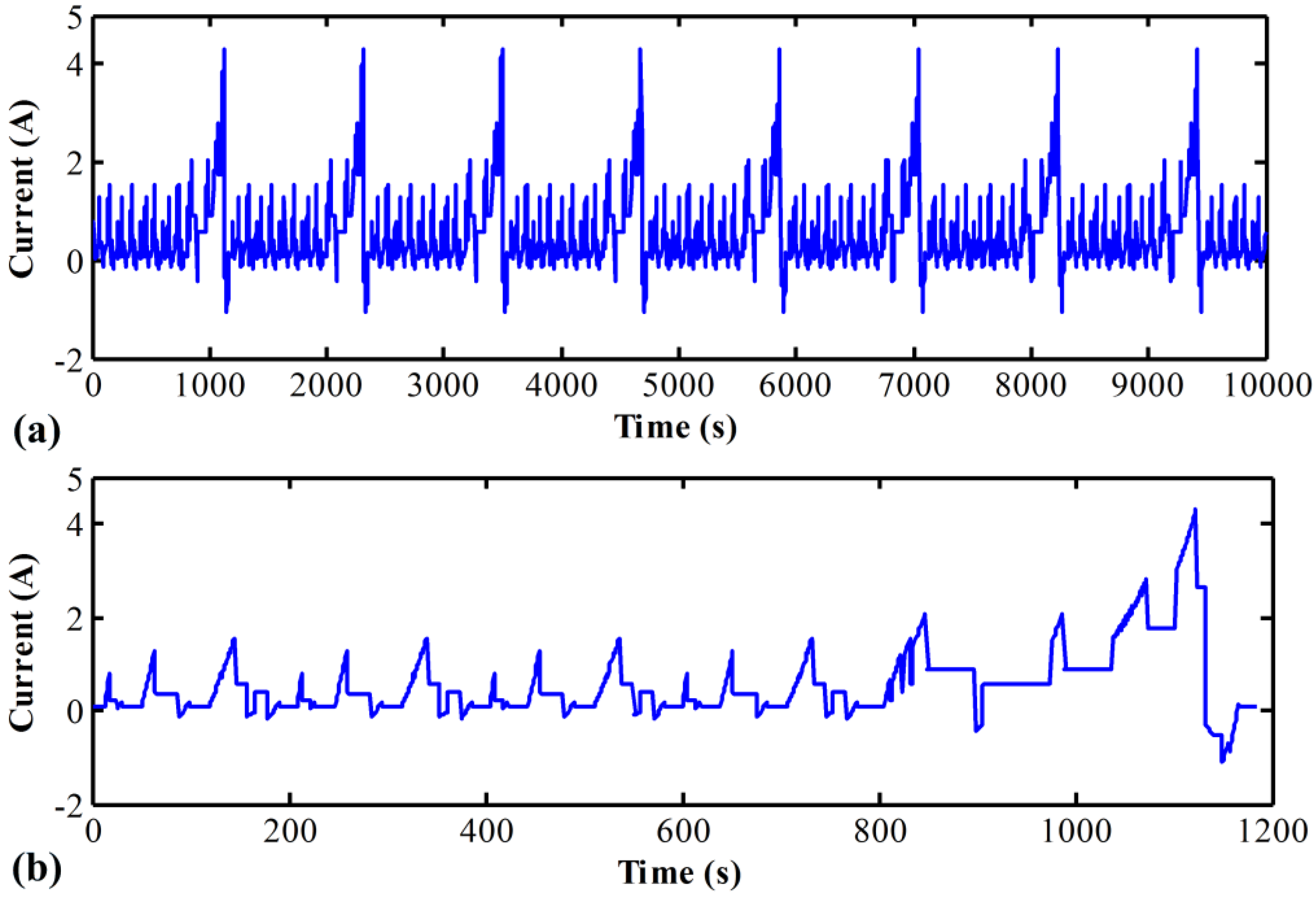
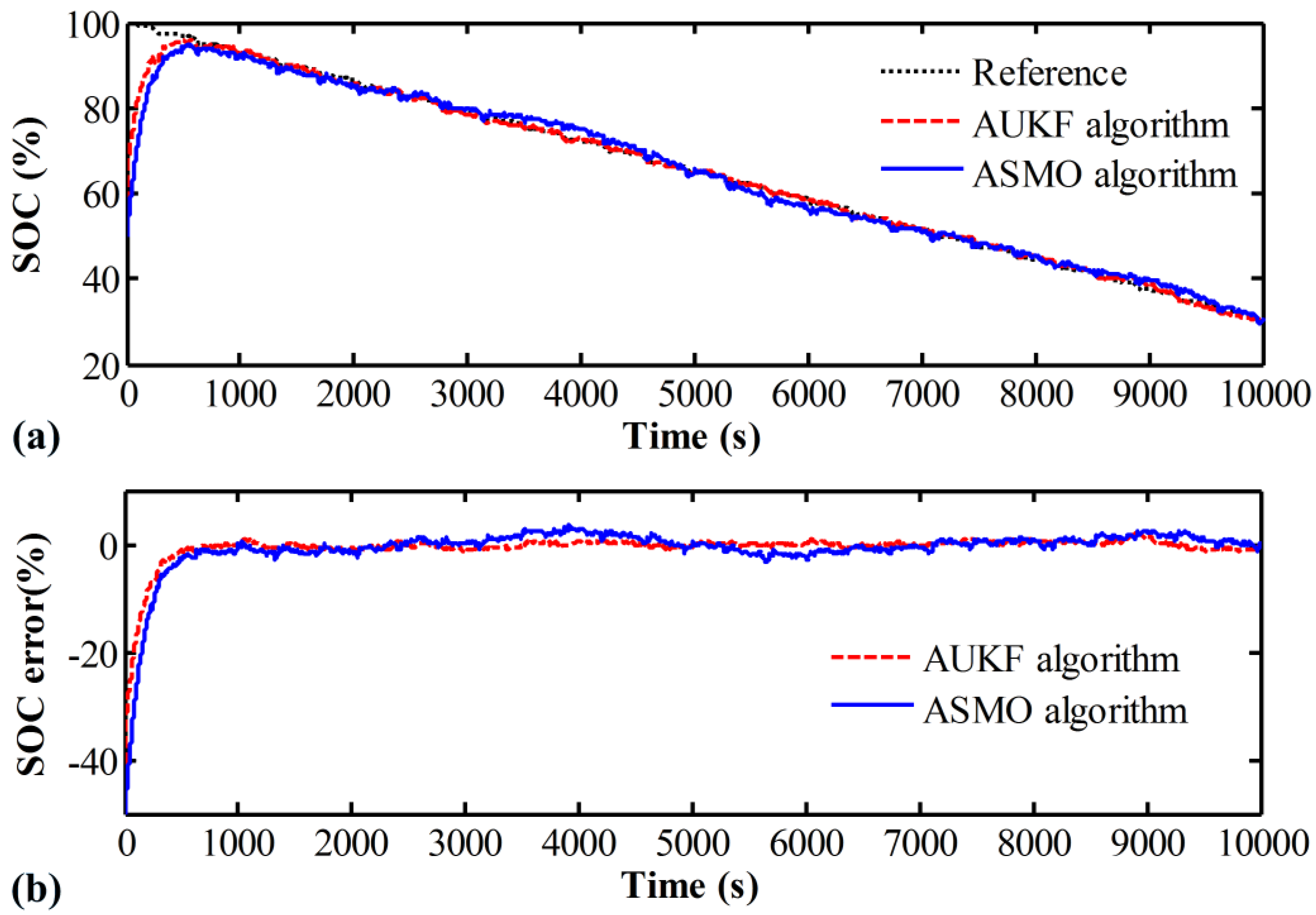
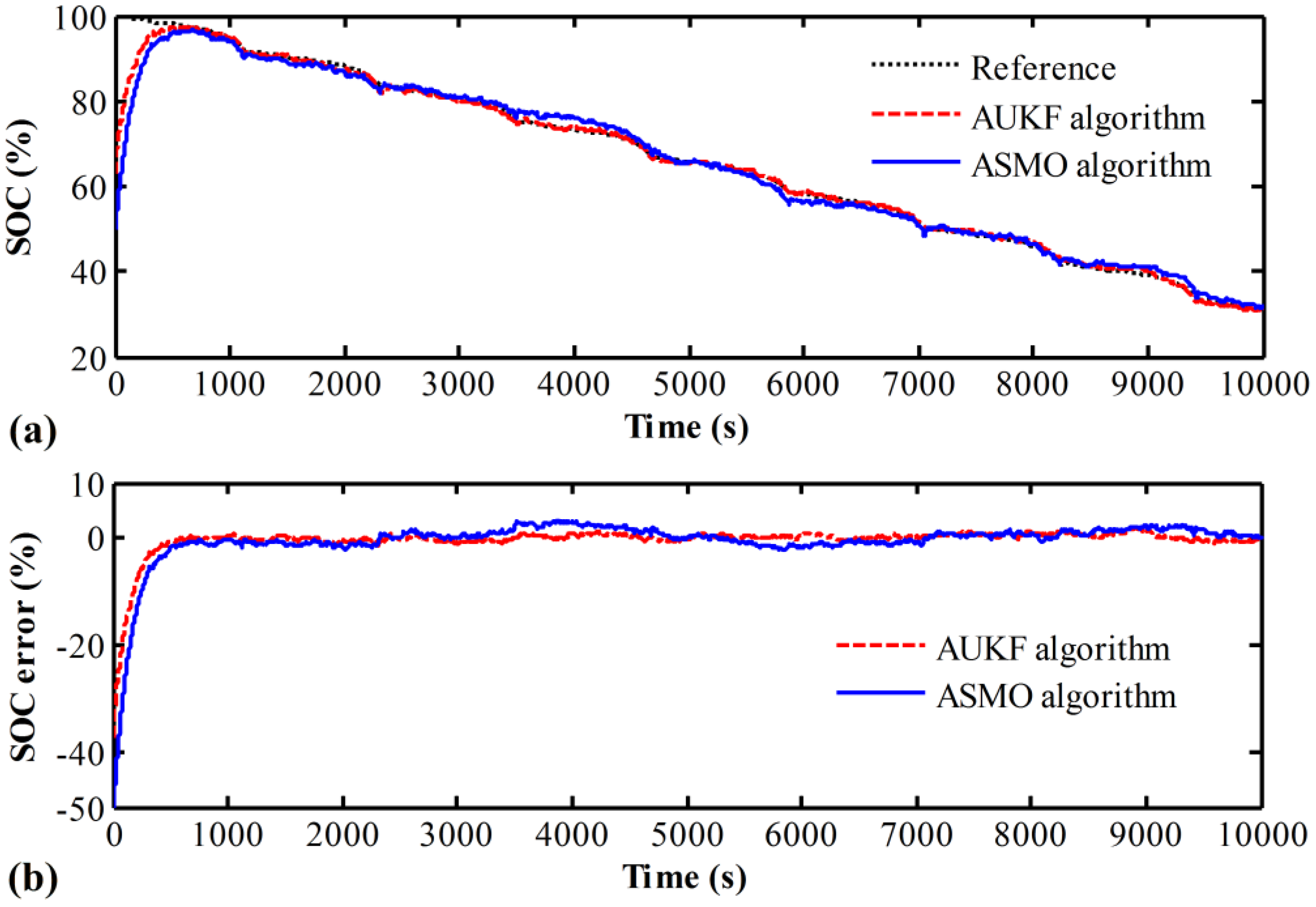
In this paper, a comparison study between the two model-based adaptive algorithms above is carried out using the experimental data collected from a lithium-ion battery test bench. Two typical driving cycles, namely the Dynamic Stress Test (DST) and New European Driving Cycle (NEDC) are used to evaluate the performance of the algorithms in terms of convergence behavior, tracking accuracy, computational cost and estimation robustness against parameter uncertainties.
The remainder of the paper is organized as follows: in
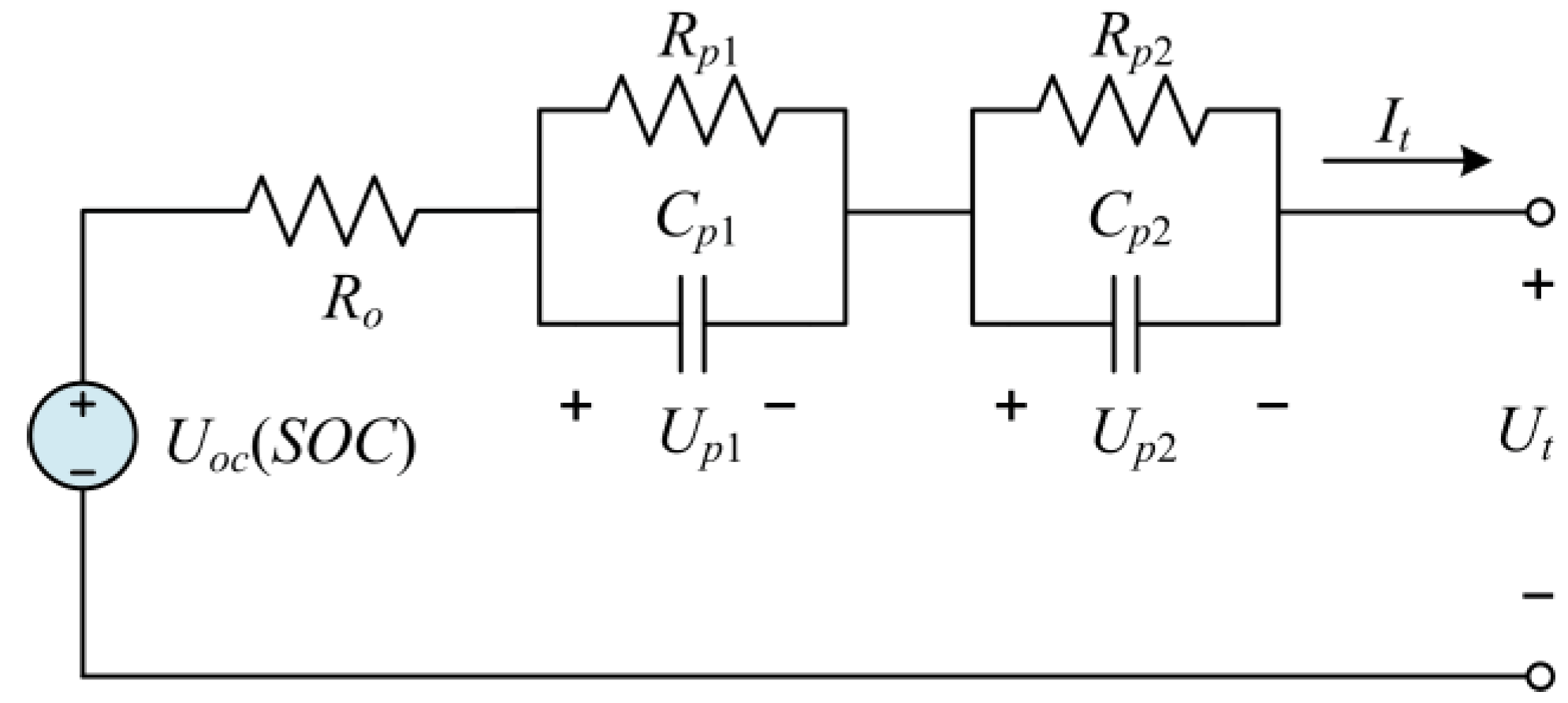
Section 2, the battery state functions are established based on an equivalent circuit model which is used to characterize the dynamic behaviors of the lithium-ion battery, and the method for battery model parameter identification is discussed.
Section 3 introduces the principles of AUKF- and ASMO-based SOC estimation algorithms in detail.
Section 4 presents the experimental results and discussion, and
Section 5 provides the conclusions of the paper.
5. Conclusions
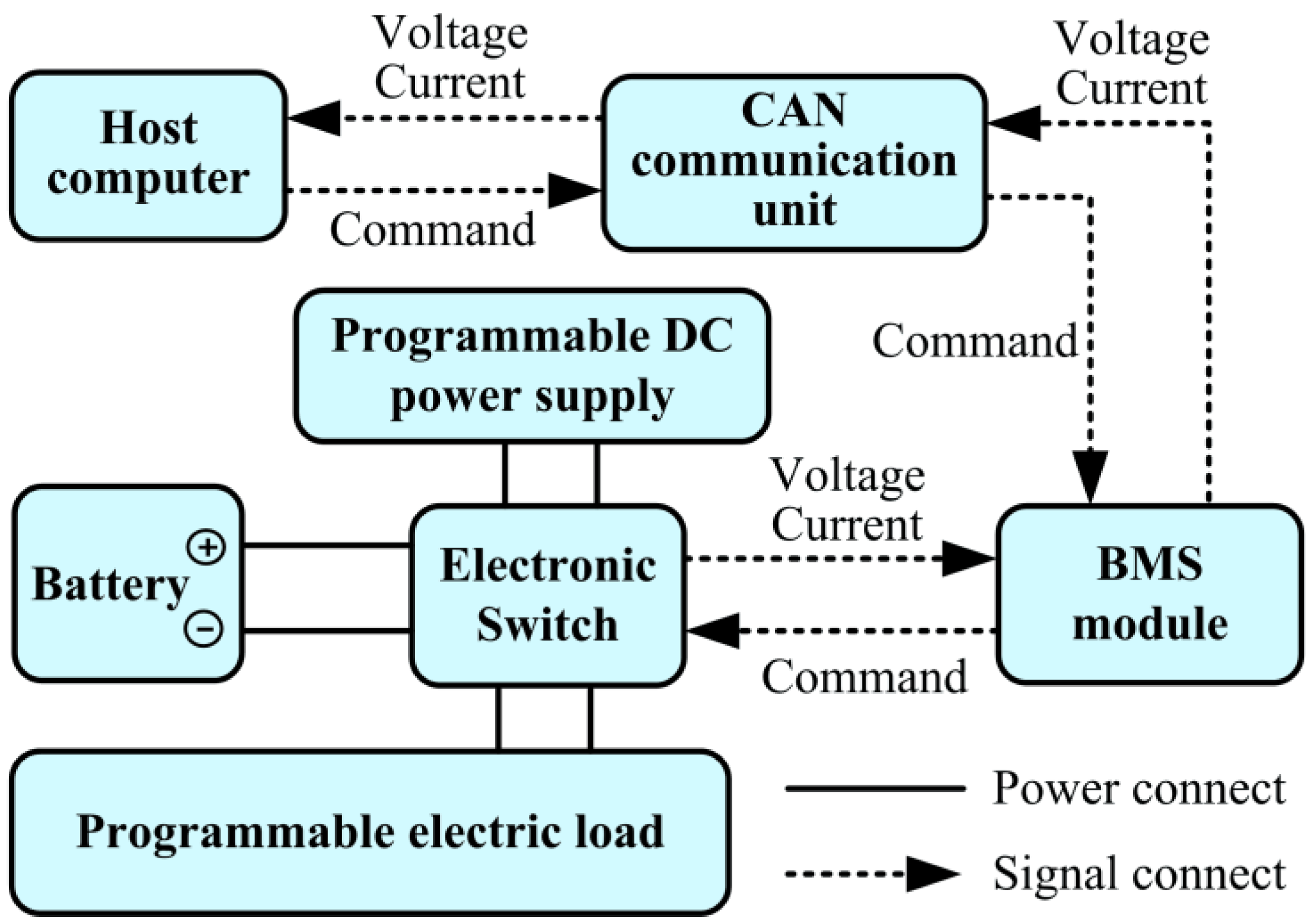
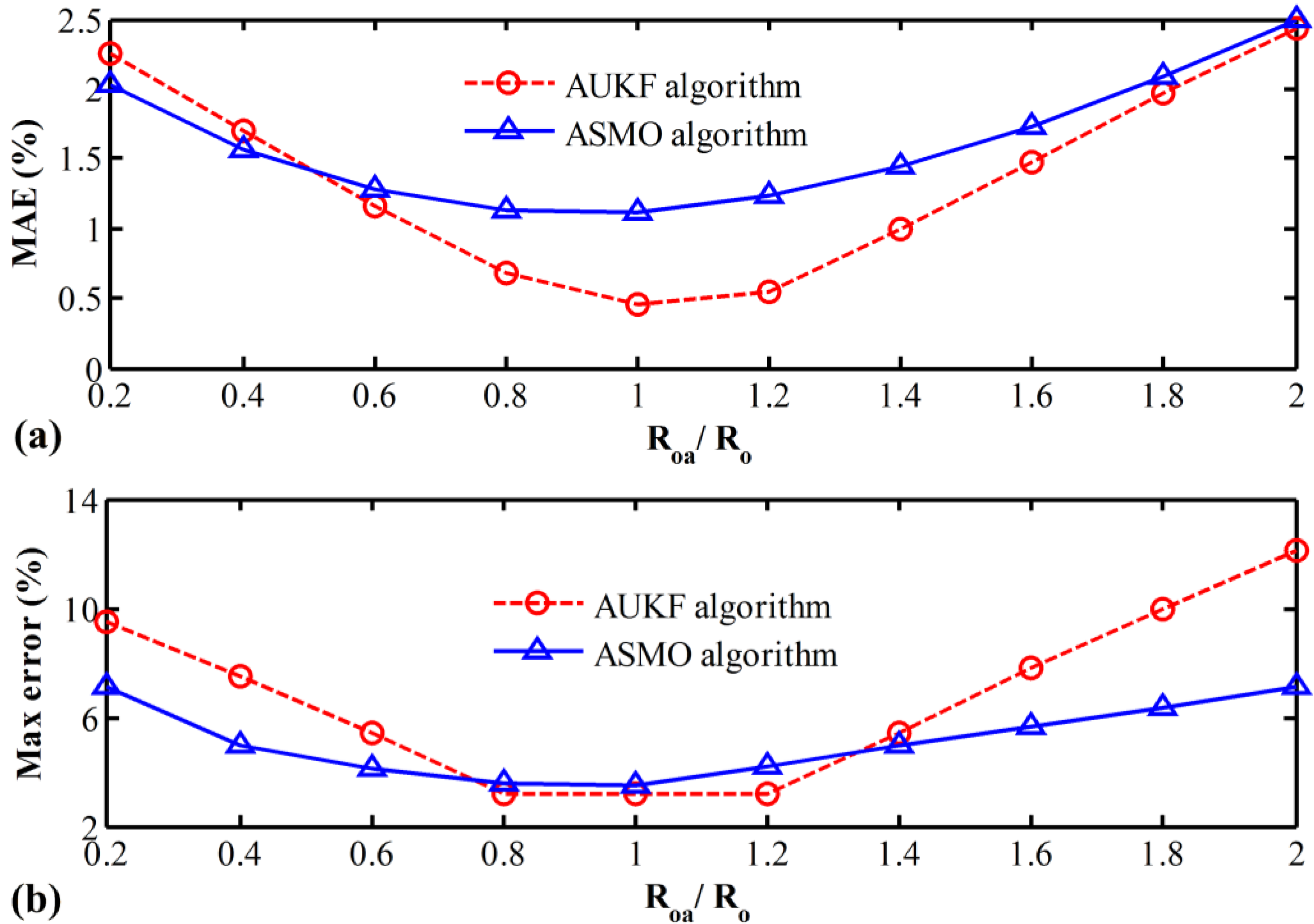
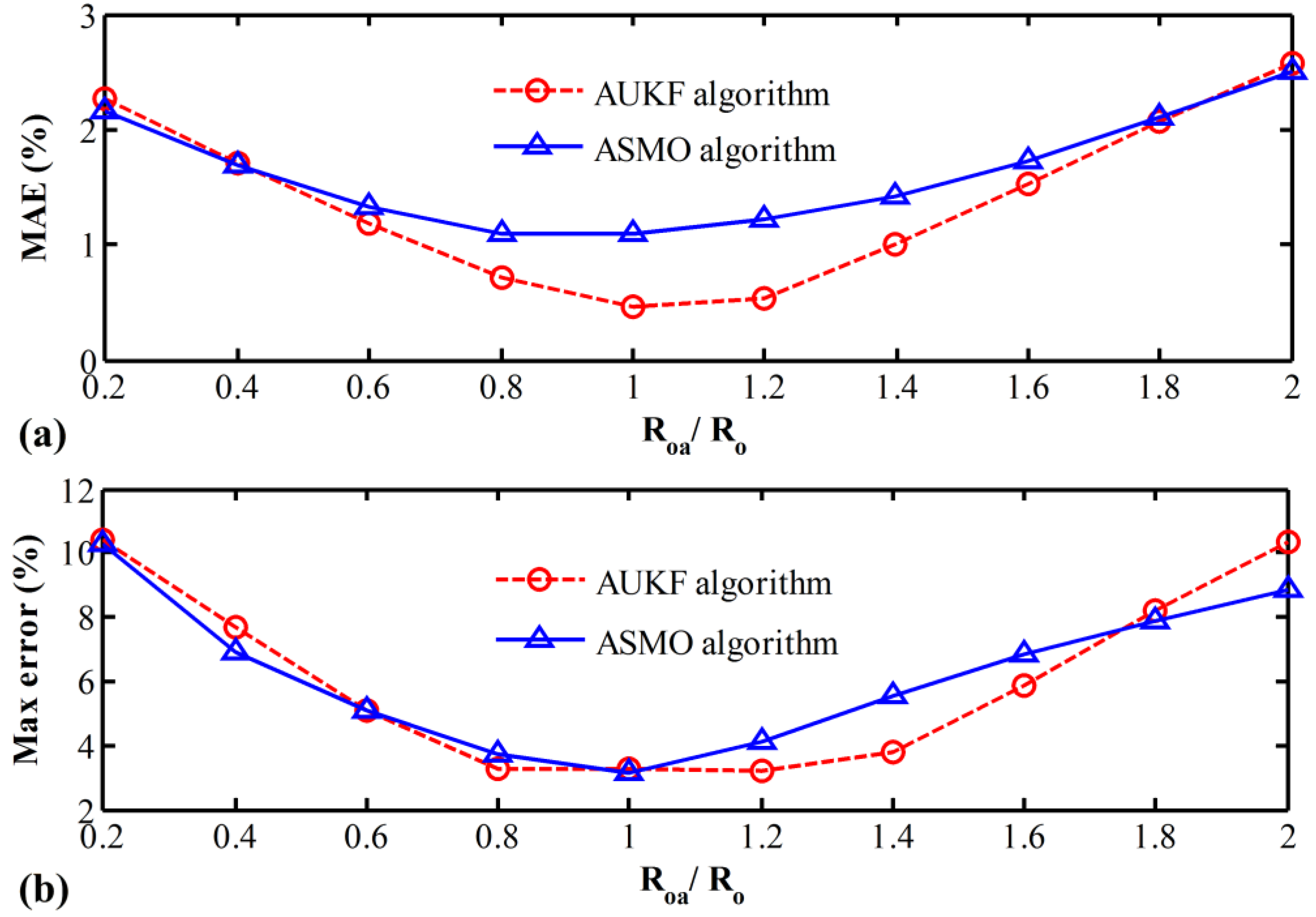
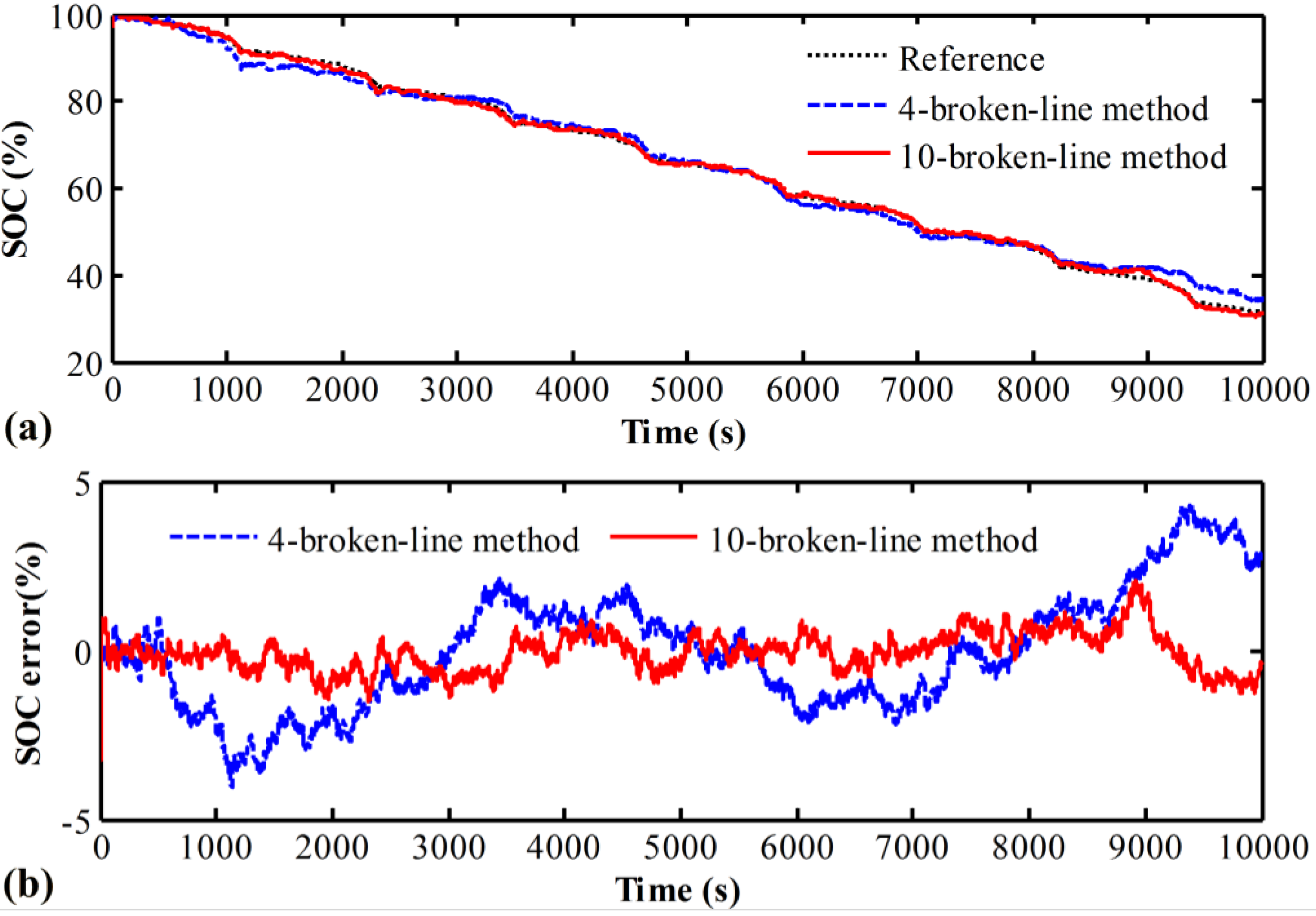
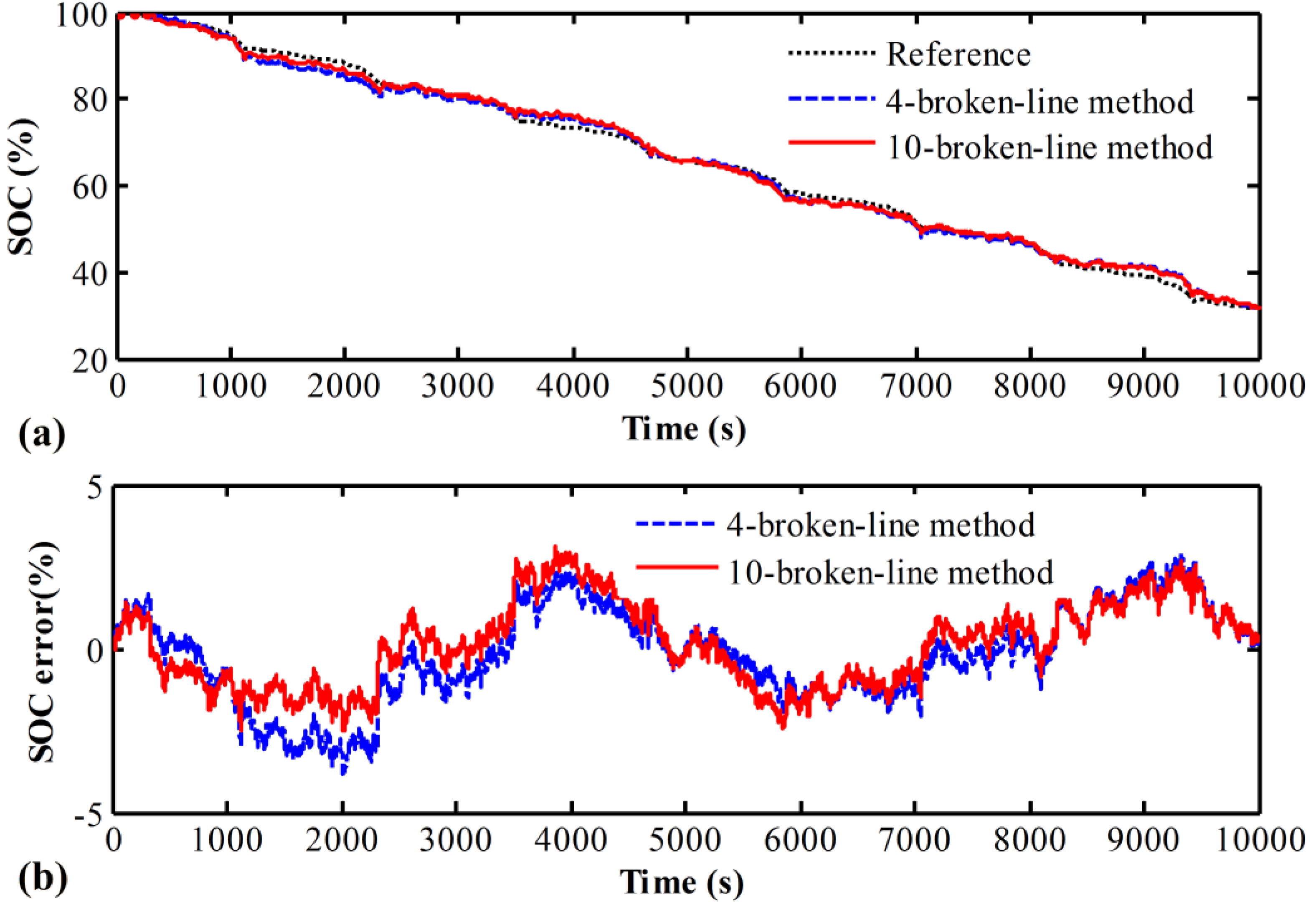
In this paper, two model-based adaptive algorithms, namely AUKF and ASMO, are applied to estimate the SOC of lithium-ion batteries in EVs and compared in terms of convergence ability, tracking accuracy, computational cost and estimation robustness. Firstly, the battery state equations are derived from the second-order RC battery equivalent circuit model, and the model parameters are identified with the exponential-function fitting method based on the data collected from a battery test bench. Then, the general formulations of AUKF and ASMO-based estimation approaches are studied. Finally, experiments based on the DST and NEDC cycles are carried out to evaluate the performance of estimation algorithms. Comparison results indicate that both the algorithms can deal well with the issues related to the initial SOC errors and modeling errors, but the AUKF performs better with a higher tracking accuracy and a faster convergence rate related to the initial SOC values. However, the ASMO has a lower computational cost and a better robustness against the parameter uncertainties of the battery model, such as different ohmic resistance values and different OCV-SOC functions.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








