3. Buck-Boost Converter
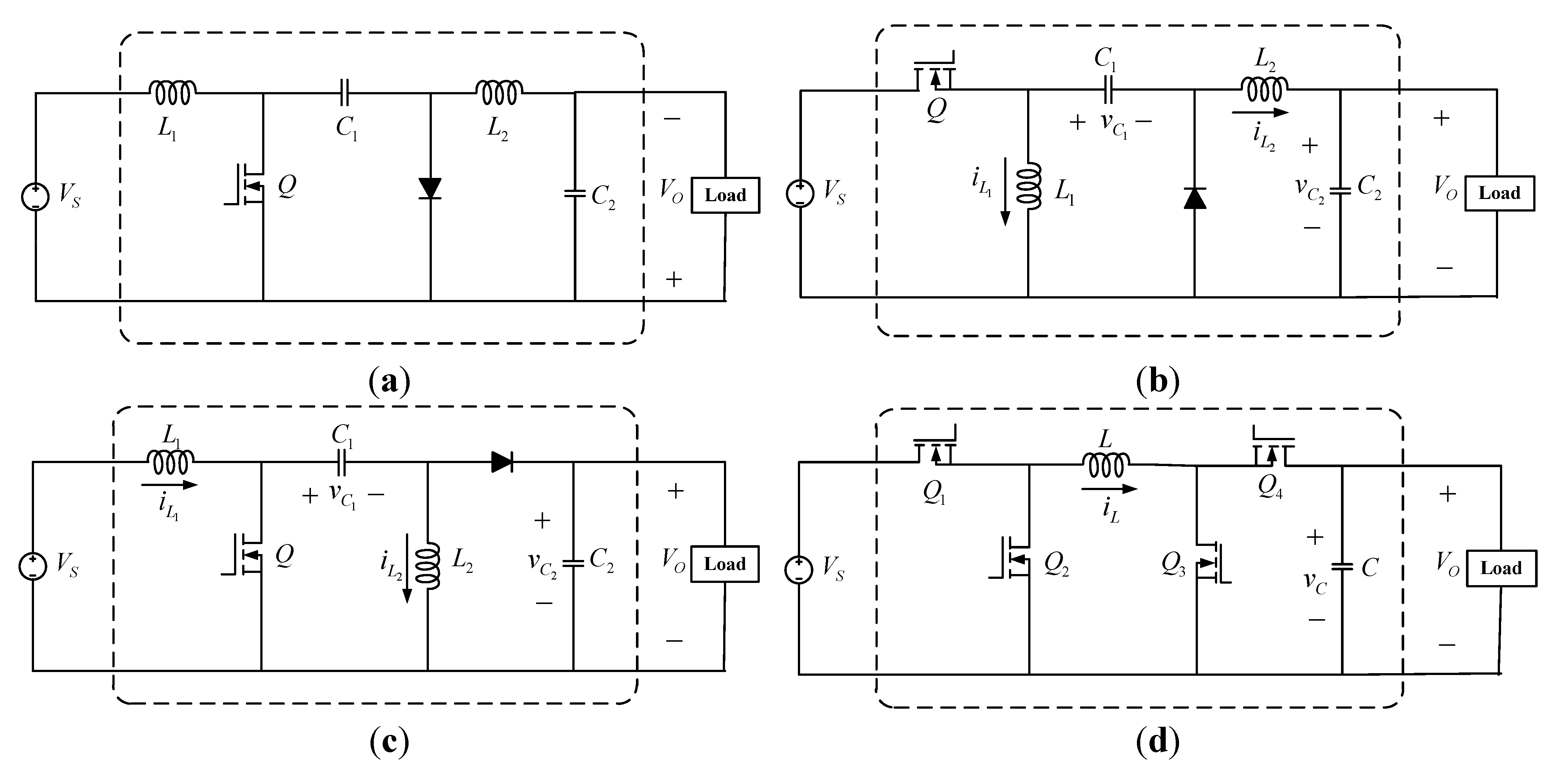
The buck-boost converter can convert the supply voltage source into higher and lower voltages at the load terminal. Several commonly used buck-boost converter topologies are shown in
Figure 2. The Cuk converter in
Figure 2a is an inverting type power converter (output voltage polarity is reversed), and the Zeta, SEPIC, and four-switch type topologies represented in
Figure 2b–d are non-inverting buck-boost converters. The voltage at the load terminal is controlled by continuously adjusting the duty ratio of the power switch of the buck-boost converter. Because the voltage polarity at the load end is opposite to that at the source terminal of the Cuk converter, we examined only the non-inverting type buck-boost converter topologies (
Figure 2b–d) in this study. Zeta and SEPIC converters contain two inductors, two capacitors, a diode, and a metal-oxide-semiconductor field-effect transistor (MOSFET) power switch. In addition, the four-switch type converter in
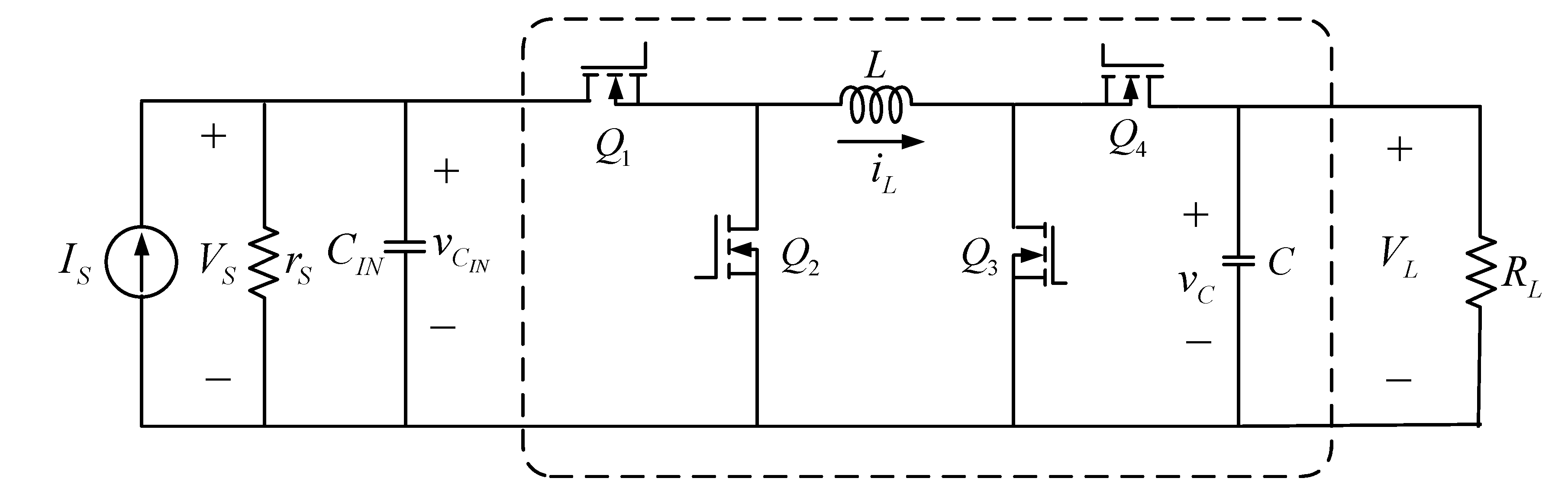
Figure 2d is a synchronous buck-boost converter, containing an inductor, a capacitor, and four MOSFET power switches. The switches
and
work as one group, and
and
work as another group. When
and
are turned on, the switches
and
are turned off, and vice versa. In a steady-state condition, the output voltage of the non-inverting type buck-boost converter is:
Thus, we can regulate the output voltage to higher or lower voltages compared with the source voltage by appropriately controlling the operating duty ratio for the MOSFET power switches.
Figure 2.
Buck-Boost Converters. (a) Cuk converter; (b) Zeta Converter; (c) SEPIC Converter; (d) Four-switch type converter.
Figure 2.
Buck-Boost Converters. (a) Cuk converter; (b) Zeta Converter; (c) SEPIC Converter; (d) Four-switch type converter.
To investigate the performance of the buck-boost converters, dynamic analyses of the non-inverting type converters (
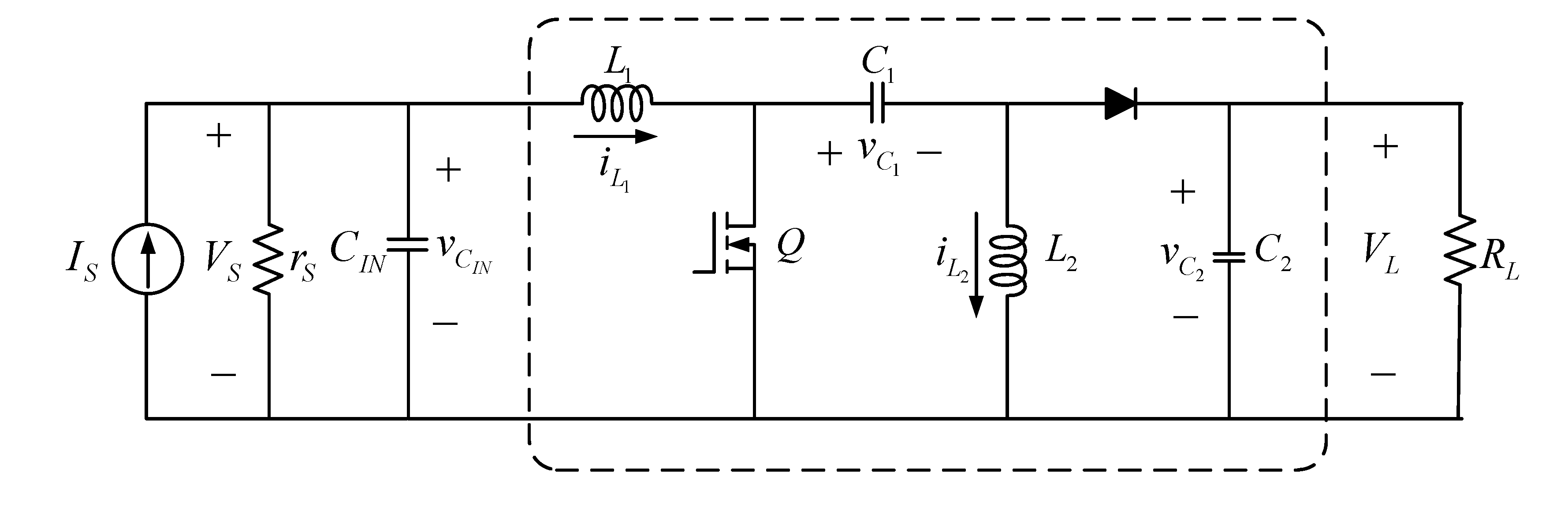
Figure 2b–d) were conducted first. The purpose of MPPT is to obtain the maximum power from the solar system. To maximize the efficiency of the buck-boost converter, the system is designed such that the converter is operated in continuous conducting mode. Therefore, we will only discuss the dynamic model of the converters operated in continuous conducting mode. According to [
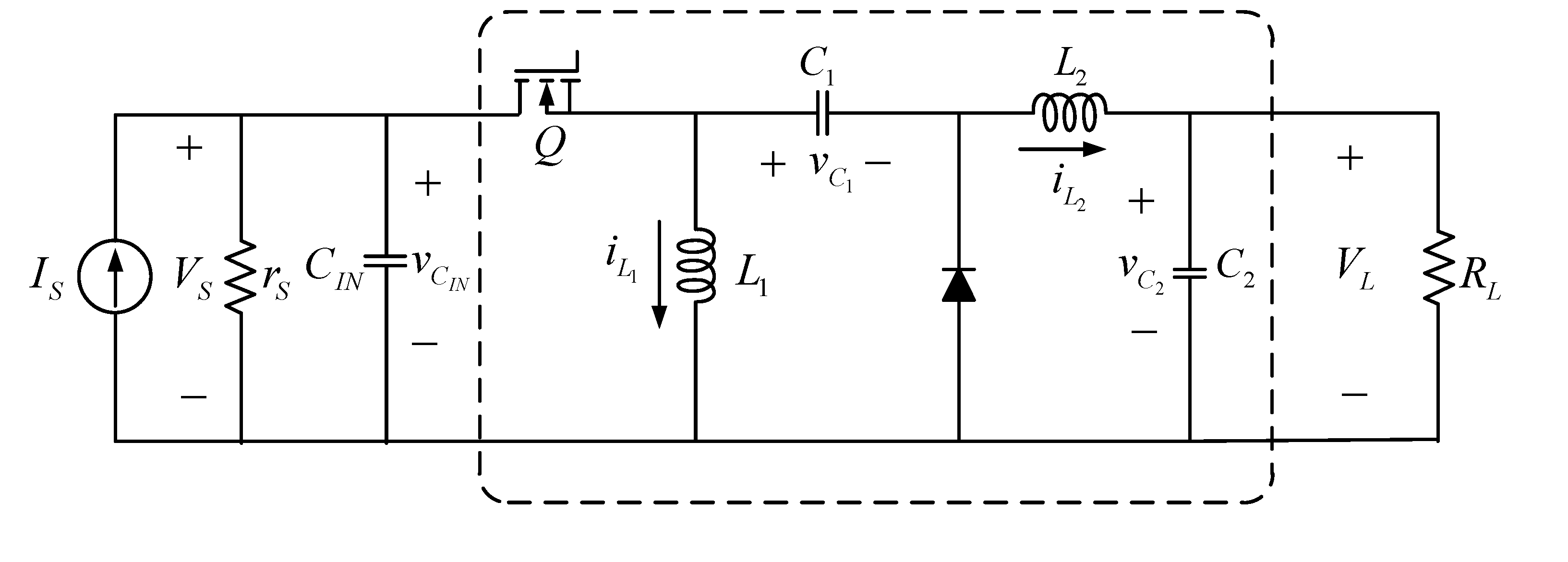
16], the converter is fed by a current source. The SEPIC buck-boost converter powered by a current source is shown in
Figure 3. The input of the system is the source current
. The voltage at the input terminal,
, is the output of the system for dynamic analysis. The resistor
represents the internal resistance of the power source. An input capacitor
is included in this study. For simplicity, a resistive load is considered in this study. Using the variables defined in
Figure 3 and taking the current flowing through the inductor
and the voltage across the capacitor
as the state of the converter, the averaged state-space model of the dynamics of the SEPIC converter is:
Figure 3.
The current-fed SEPIC buck-boost converter circuit.
Figure 3.
The current-fed SEPIC buck-boost converter circuit.
For investigating the performance of the buck-boost converter, dynamic analyses for duty-cycle variations were conducted. A small signal model was obtained by applying a small disturbance to the system and ignoring second order terms. If the duty cycle with a small disturbance is
, the corresponding state and system output variations are
,
, and
. Variables
and
represent the mean (or steady state) and variation of signal
. The small signal dynamic model driven by the small disturbance of duty cycle
, (the transfer function from control
to the input-voltage
), is:
Using the MATLAB symbolic tool, the transfer equation of the system (5) can be rewritten as:
The gain and coefficients of the transfer Equation (6) are listed below:
From Equation (6), the dynamic behavior of the converter depends on the duty ratio command (
) and the source resistance (
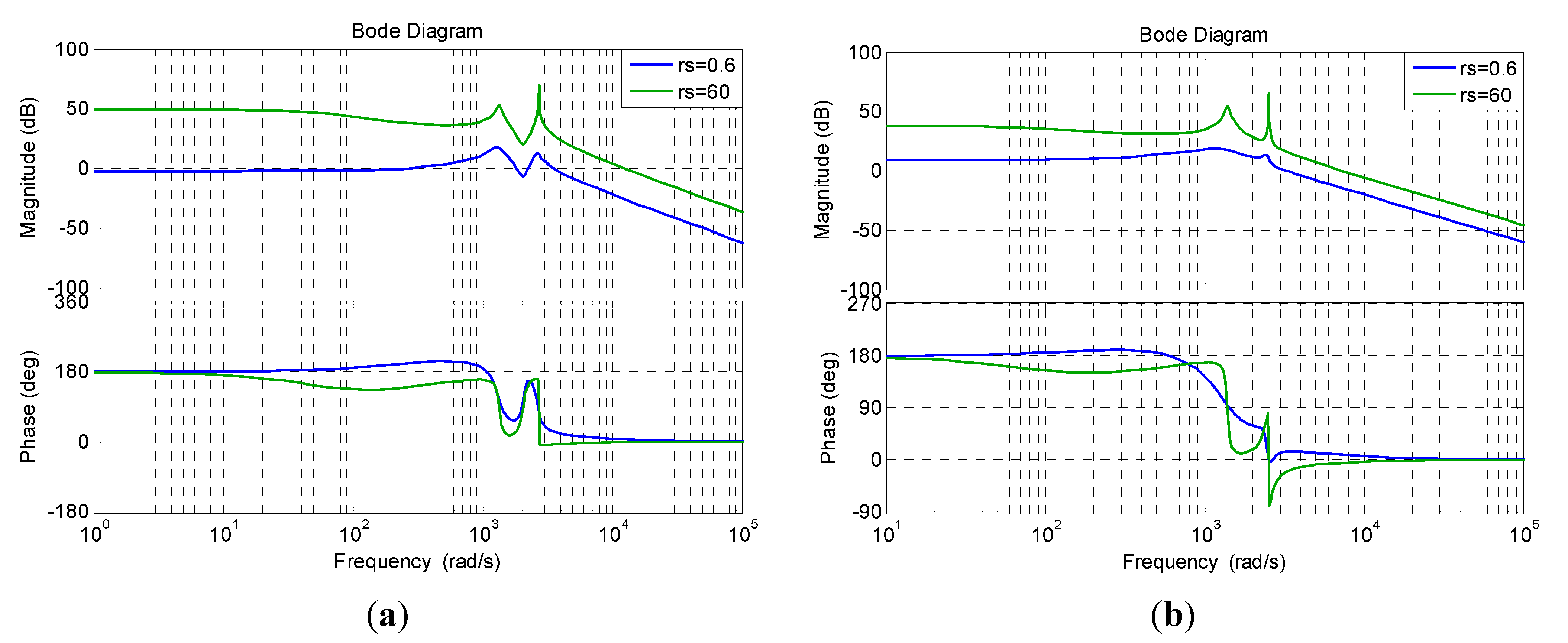
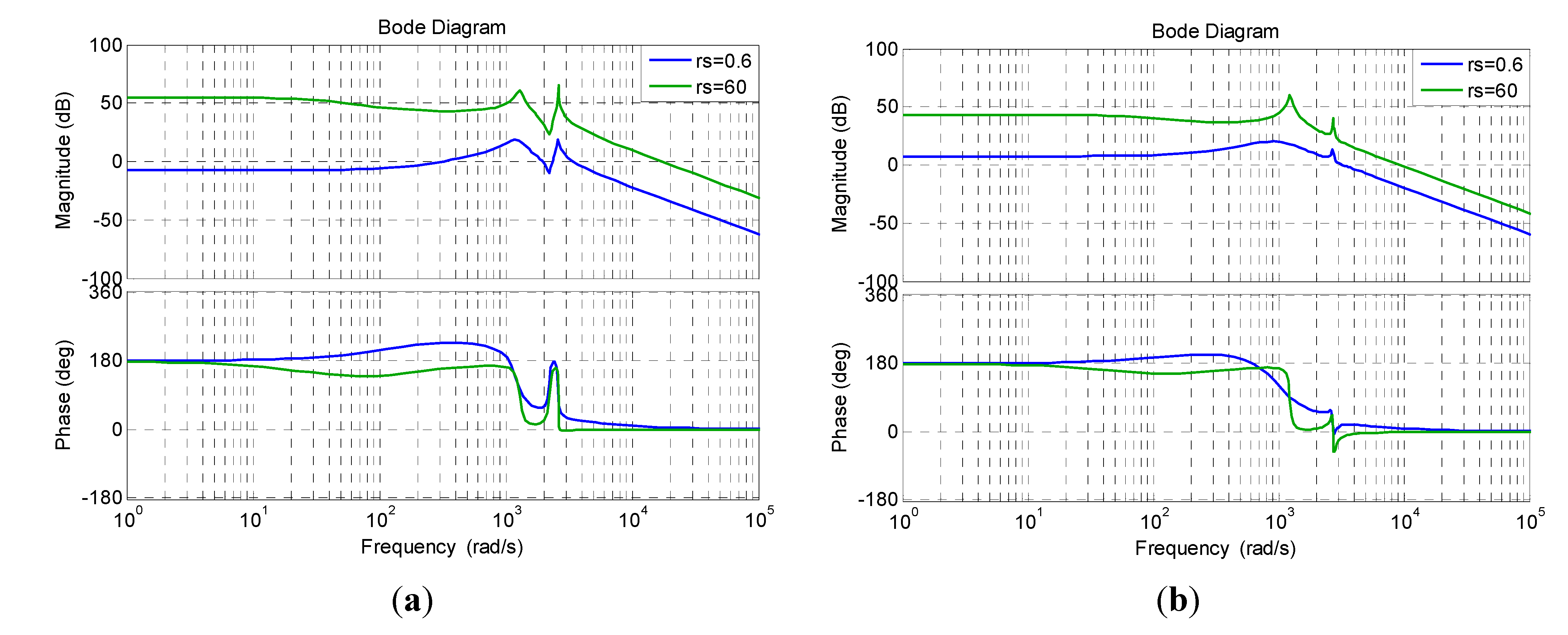
). The duty ratio command affects the pole and zero locations of the small signal dynamics, while the source resistance only affects the pole locations of the system. If the converter is powered by solar modules, the resistance may represent the dynamic resistance of the solar system. The Bode plots of the small signal dynamics Equation (5) of the SEPIC converter with
,
,
, and
are shown in
Figure 4.
Figure 4a contains the results of buck operations with different source resistance. The lower source resistance
) represents that the solar module is operated in the constant voltage region, while the higher source resistance (
) represents that the solar module is operated in the constant current region. The results for boost operations are shown in
Figure 4b. The results indicate that the source resistance has a profound effect on the dynamic characteristic of the system.
.
Figure 4.
Bode plots of the SEPIC converter. (a) ; (b) .
Figure 4.
Bode plots of the SEPIC converter. (a) ; (b) .
Using the similar techniques, a state-space representation of the dynamics of the current-fed Zeta converter, as shown in
Figure 5, operated in continuous conducting mode can be obtained as:
Figure 5.
The current-fed Zeta buck-boost converter circuit.
Figure 5.
The current-fed Zeta buck-boost converter circuit.
The small signal dynamic model driven by the small disturbance of duty cycle
is:
The dynamics of Equation (8) expressed in transfer function form is:
The gain and coefficients of the transfer Equation (9) are listed below:
From Equation (9), it is clear that the source resistance will not affect the zero locations of the dynamic system. The Bode plots using the same parameters for the SEPIC converter are shown in
Figure 6. The results in
Figure 6 also indicate that the dynamic behavior of the converter is highly dependent on the magnitude of the source resistance.
Figure 6.
Bode plots of the Zeta converter. (a) ; (b) .
Figure 6.
Bode plots of the Zeta converter. (a) ; (b) .
Similarly, a state-space form of the dynamics of the current-fed four-switch type converter, as shown in
Figure 7, operated in continuous conducting mode is given by:
Figure 7.
The current-fed four-switch type buck-boost converter circuit.
Figure 7.
The current-fed four-switch type buck-boost converter circuit.
The small signal dynamic model from
to
is:
The dynamics of system Equation (11) expressed in transfer function form is:
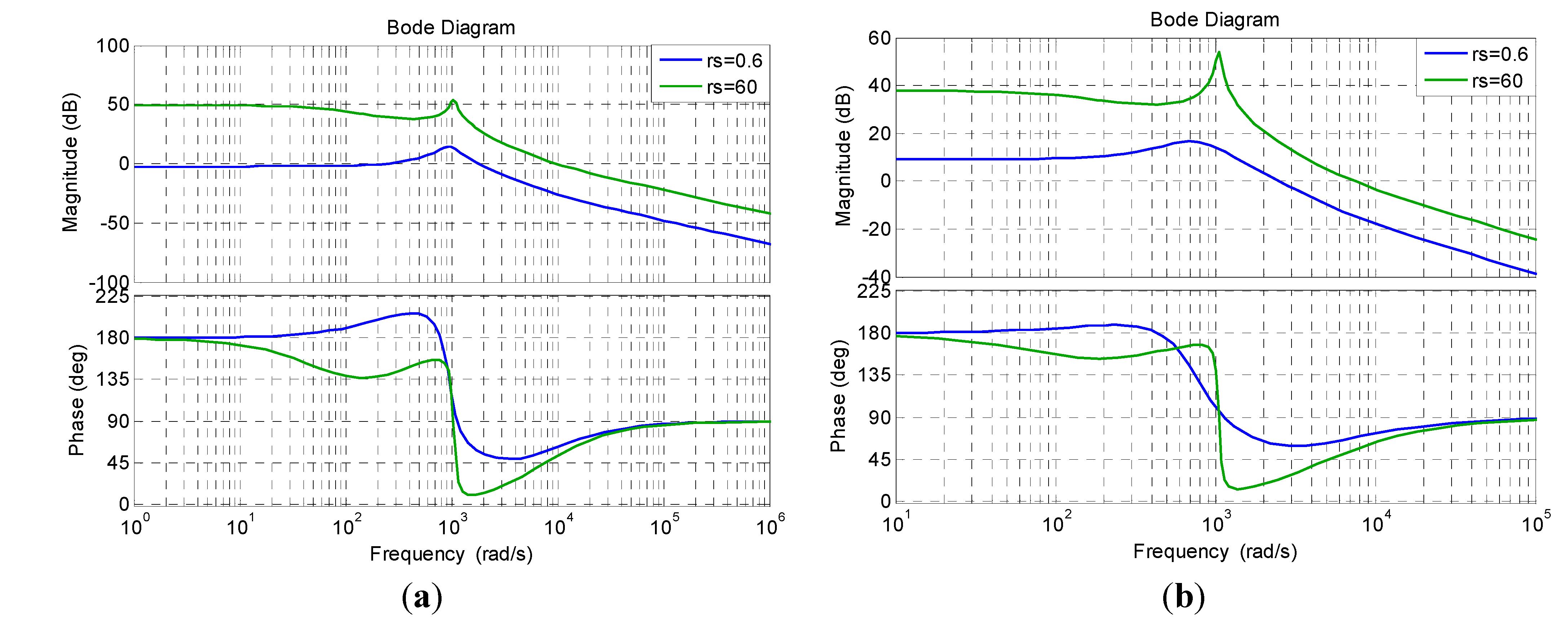
The Bode plots of the four-switch type converter are shown in
Figure 8. Obviously, the results in
Figure 8 also indicate that the dynamic behavior of the converter highly depends on the magnitude of the source resistance.
Figure 8.
Bode plots of the Four-Switch type converter. (a) ; (b) .
Figure 8.
Bode plots of the Four-Switch type converter. (a) ; (b) .
From the above discussion, the small signal dynamics from control to input-voltage of the buck-boost converters considered in this study are highly dependent on the internal resistance of the power source. That is, if the converter is powered by a solar system, the dynamic characteristics depend on the operating region of the solar system. All of the three buck-boost converters are used for the circuit simulation in this study. For simplicity and easy of demonstration, resistive loads are considered in the circuit simulations. The results are presented in the following sections.
It is worth noting that if the control dynamics to output-voltage of the converters are considered, both poles and zeros of the system depend on the source resistance and the duty ratio command. Moreover, the system contains right-half plane zeros. The number and locations of the right-half plane zeros also depend on the source resistance and the duty ratio command. The right-half plane zeros cause constraints on the design of control system. Control of the output-voltage of the converter is not in the scope of this paper. Therefore, we will not discuss the details of the dynamics of the system from control to output-voltage of the converter in this paper.
6. Results and Discussion
The voltage and current outputs from the PV model for the SEPIC buck-boost converter MPPT system loaded with different resistive loads are presented in
Figure 14,
Figure 15 and
Figure 16.
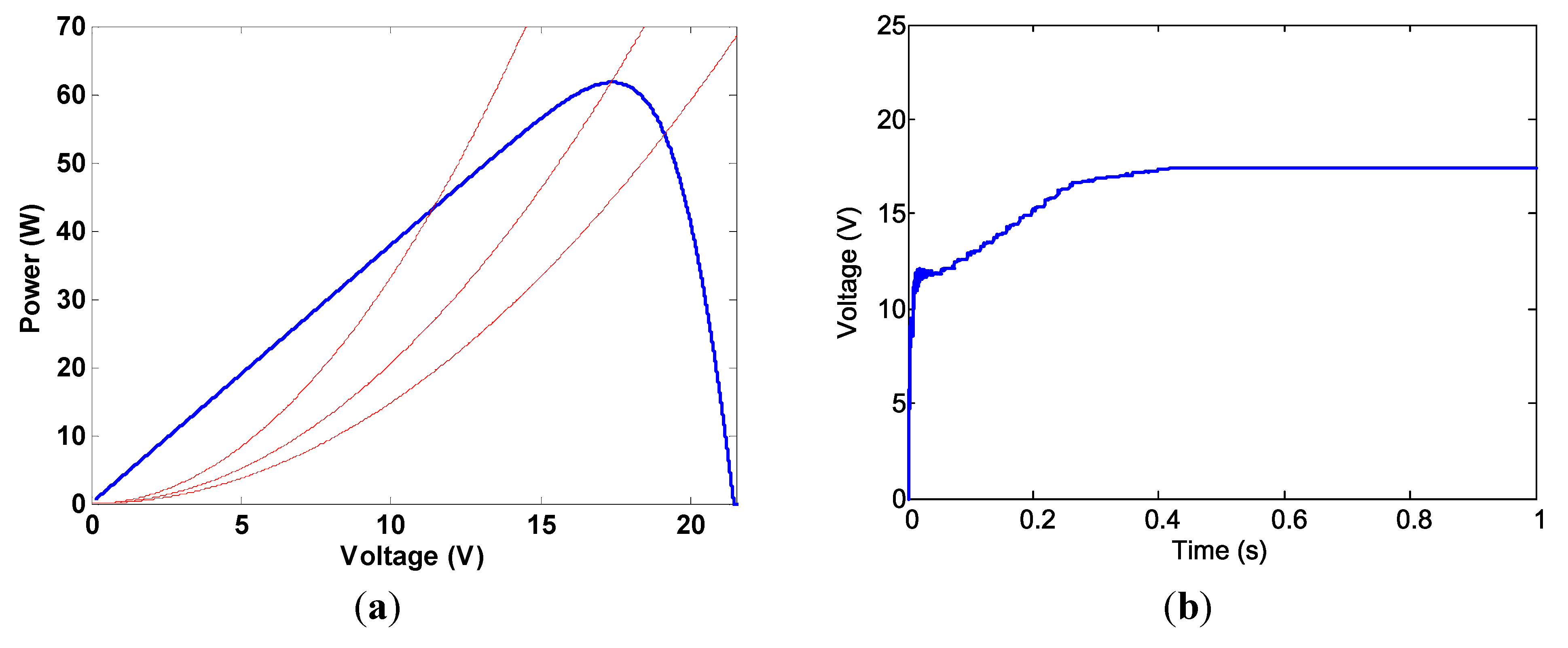
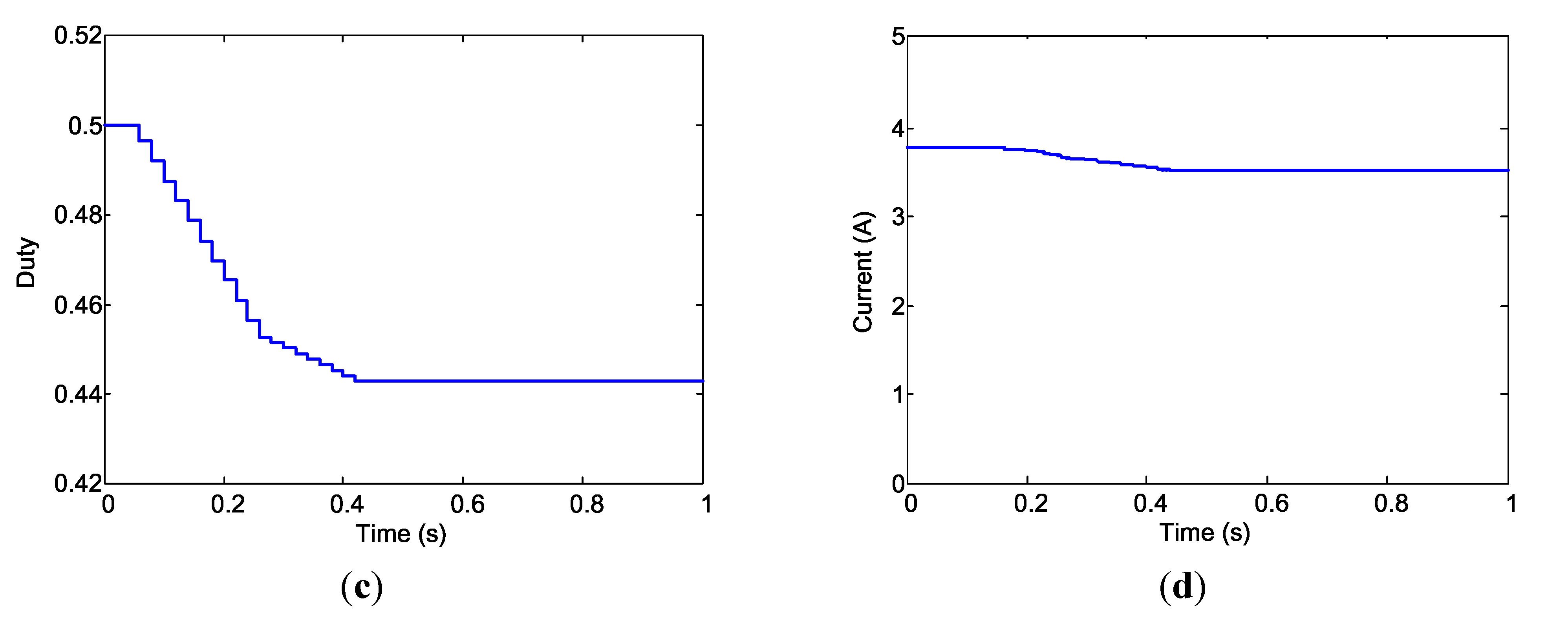
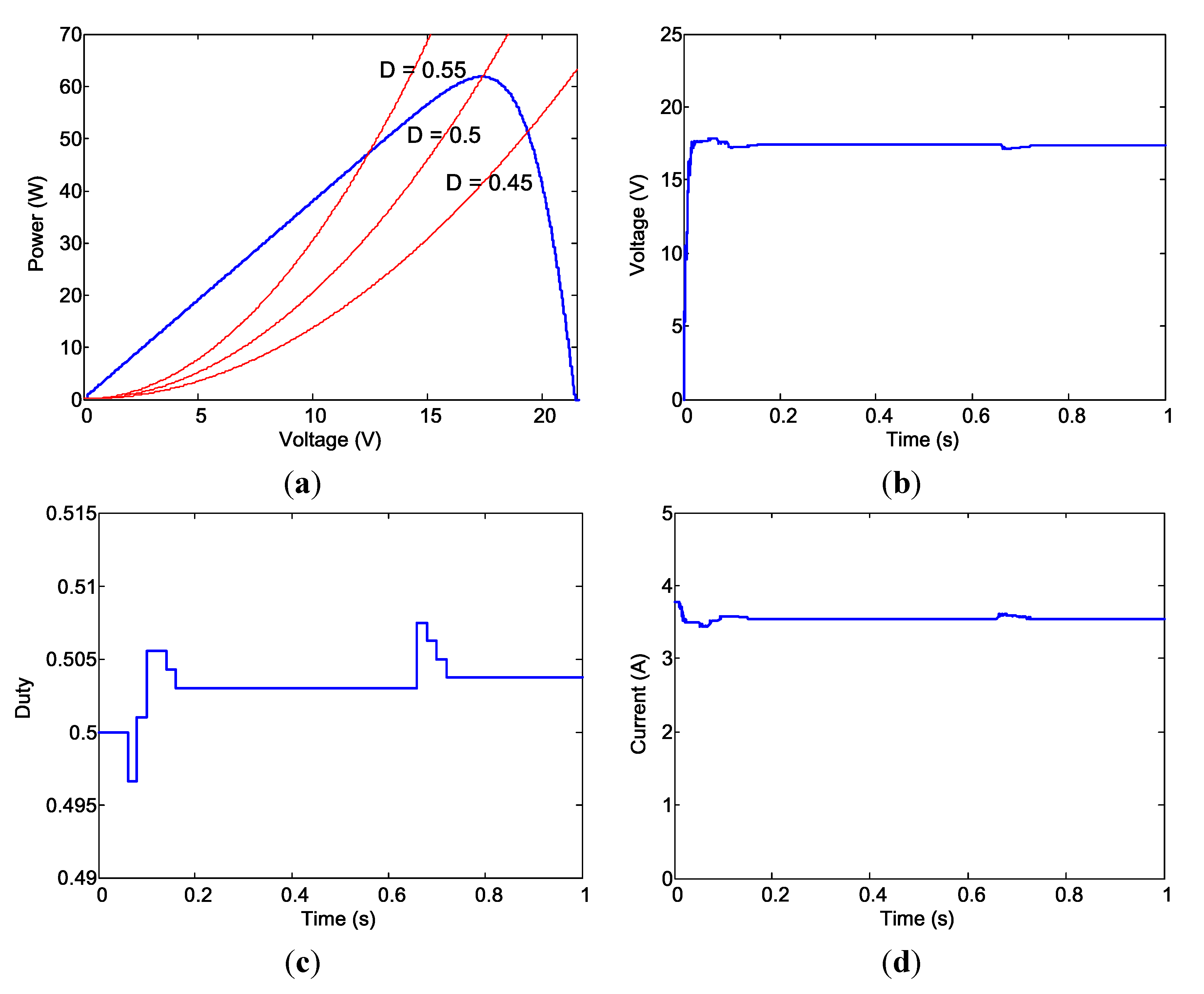
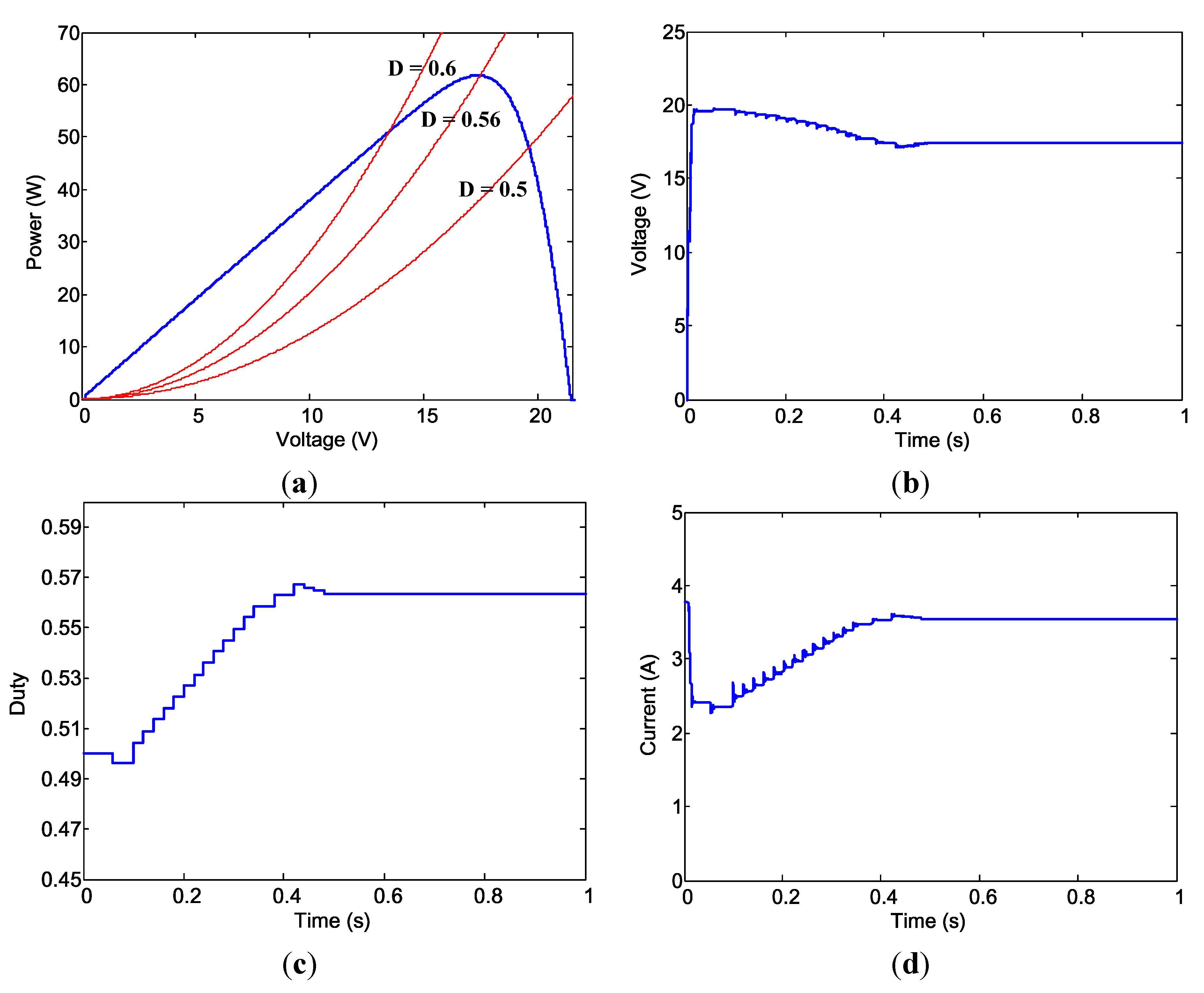
Figure 14 shows the results for the 3 Ω resistive load.
Figure 14a represents the power characteristics of the PV panel and power curve for different duty ratios. The analytical value of the duty ratio for the maximum power point is 0.44 for the 3 Ω load resistor. The voltage and current from the PV model are 17.44 V and 3.54 A, respectively. The steady-state duty ratio from the fuzzy controller is 0.4428 (
Figure 14b). The results perfectly matched the maximum power point, as expected.
Figure 14.
Figure 14. Circuit simulation results with 3 Ω load. (a) Power characteristics; (b) Duty ratio command; (c) Output voltage from PV model; (d) Output current from PV model.
Figure 14.
Figure 14. Circuit simulation results with 3 Ω load. (a) Power characteristics; (b) Duty ratio command; (c) Output voltage from PV model; (d) Output current from PV model.
The results for 4.9 Ω and 8 Ω loads are shown in
Figure 15 and
Figure 16. As mentioned, the maximum power points were obtained. Similar results were achieved for Zeta and four-switch type buck-boost converters. The results of the MPPT circuit simulations are summarized in
Table 3. The maximum power points were almost perfectly reached for any combination of the power converters and loads discussed in this study.
Figure 15.
Figure 15. Circuit simulation results with 4.9 Ω load. (a) Power characteristics; (b) Duty ratio command; (c) Output voltage from PV model; (d) Output current from PV model.
Figure 15.
Figure 15. Circuit simulation results with 4.9 Ω load. (a) Power characteristics; (b) Duty ratio command; (c) Output voltage from PV model; (d) Output current from PV model.
Figure 16.
Circuit simulation results with 8 Ω load. (a) Power characteristics; (b) Duty ratio command; (c) Output voltage from PV model; (d) Output current from PV model.
Figure 16.
Circuit simulation results with 8 Ω load. (a) Power characteristics; (b) Duty ratio command; (c) Output voltage from PV model; (d) Output current from PV model.
Table 3.
Summaries of the MPPT circuit simulations results.
Table 3.
Summaries of the MPPT circuit simulations results.
| Converter | Zeta | SEPIC | Four-Switch |
|---|
| Load | 3 Ω | 4.9 Ω | 8 Ω | 3 Ω | 4.9 Ω | 8 Ω | 3 Ω | 4.9 Ω | 8 Ω |
| VPV (V) | 17.473 | 17.419 | 17.378 | 17.448 | 17.377 | 17.418 | 17.33 | 17.425 | 17.363 |
| IPV (A) | 3.5425 | 3.5462 | 3.5529 | 3.54 | 3.5548 | 3.5464 | 3.5632 | 3.545 | 3.5577 |
| PPV (W) | 61.77 | 61.772 | 61.773 | 61.768 | 61.772 | 61.771 | 61.75 | 61.772 | 61.772 |
| Duty Ratio | 0.4428 | 0.5031 | 0.5638 | 0.4428 | 0.5038 | 0.5635 | 0.4473 | 0.5050 | 0.5667 |
The results shown in
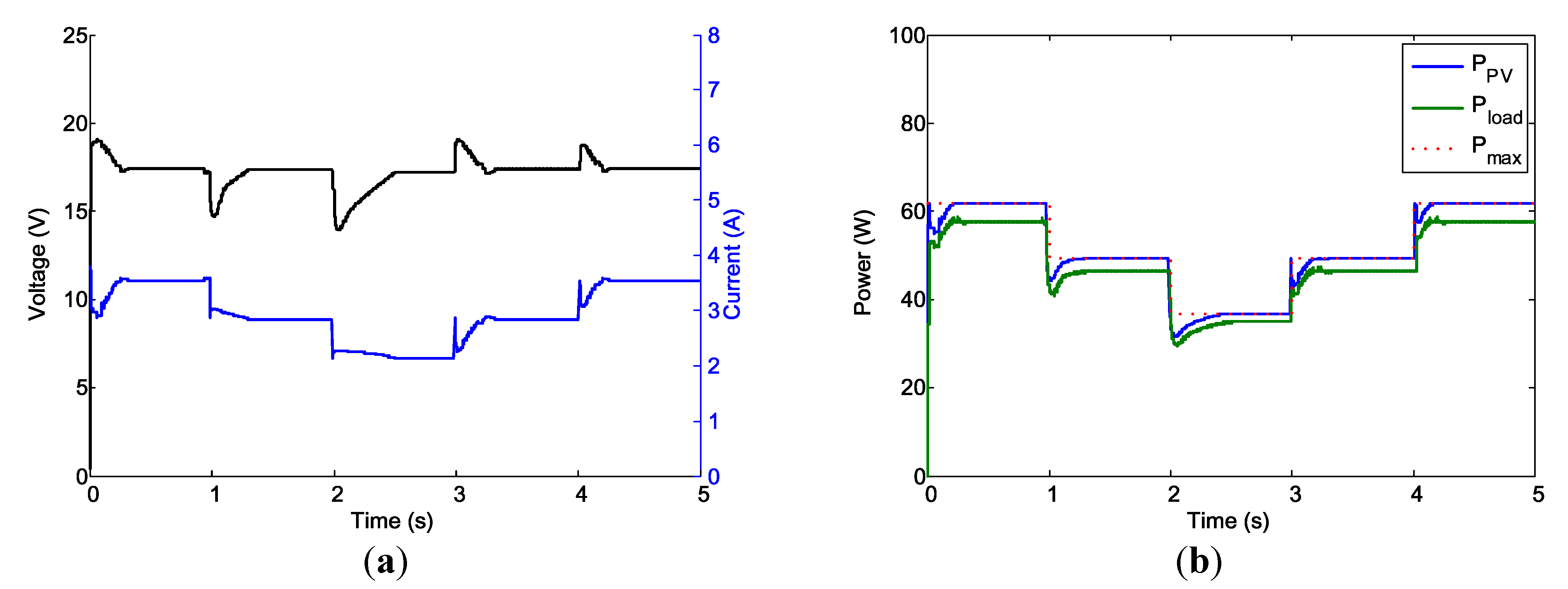
Table 3 demonstrate the success of the MPPT simulation for different load conditions. Another important feature of the MPPT function is that it can adapt to variations in irradiance. Circuit simulations for variations of the irradiation levels were also conducted in this study. The sequence of the irradiation level was
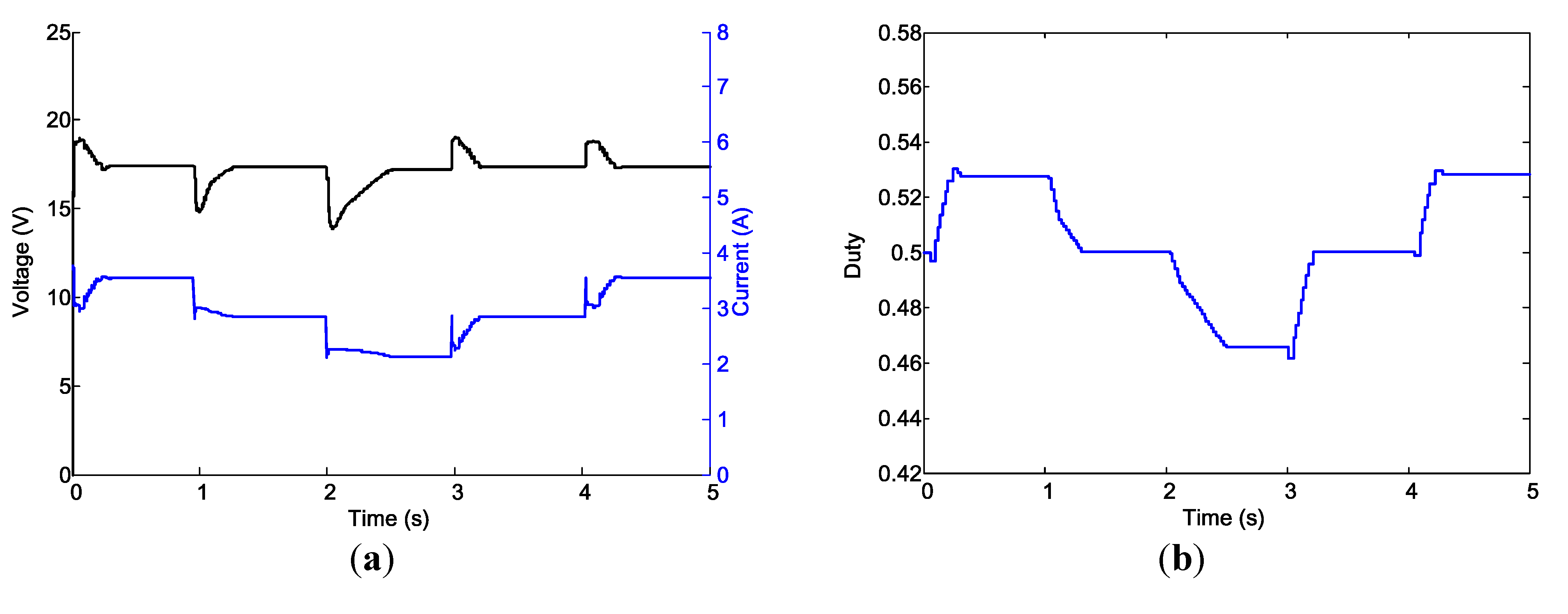
in this simulation. A 6 Ω load was used for this simulation to ensure that buck and boost operations were covered in the simulation. The duration for each irradiation level was one second. The results for using SEPIC for MPPT function are shown in
Figure 17 and
Figure 18.
Figure 17a shows the voltage and current from the PV model. The corresponding duty ratio commands are given in
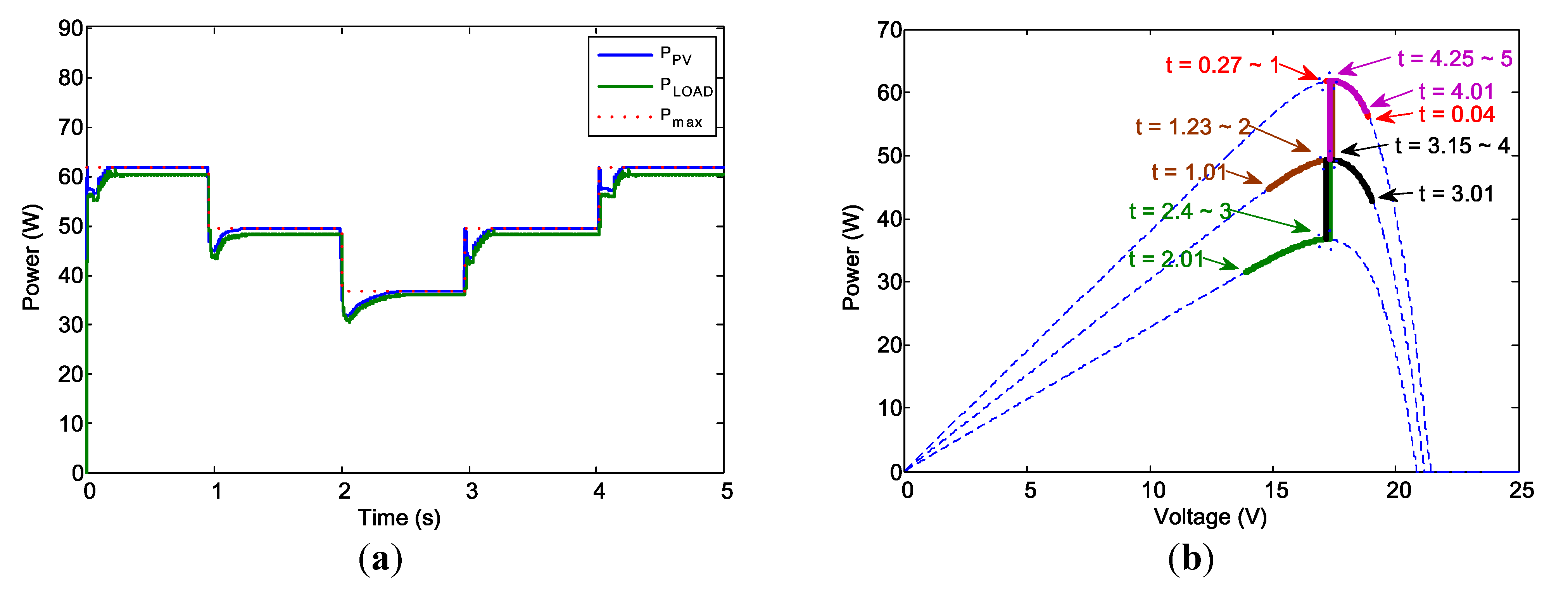
Figure 17b. Output power from the PV model and power generated at the load terminal are shown in
Figure 18a. Results in
Figure 18b are the trajectories of power
versus PV voltage during the irradiation variation simulation. The simulation results reveal that maximum power points are almost perfectly reached after short transient.
Figure 17.
Circuit simulation for irradiation variations using SEPIC converter. (a) Voltage and current from PV model; (b) Evolution of duty ratio commands.
Figure 17.
Circuit simulation for irradiation variations using SEPIC converter. (a) Voltage and current from PV model; (b) Evolution of duty ratio commands.
Figure 18.
(a) Power output from PV model and power at the load terminal; (b) Power output from PV model versus PV voltage.
Figure 18.
(a) Power output from PV model and power at the load terminal; (b) Power output from PV model versus PV voltage.
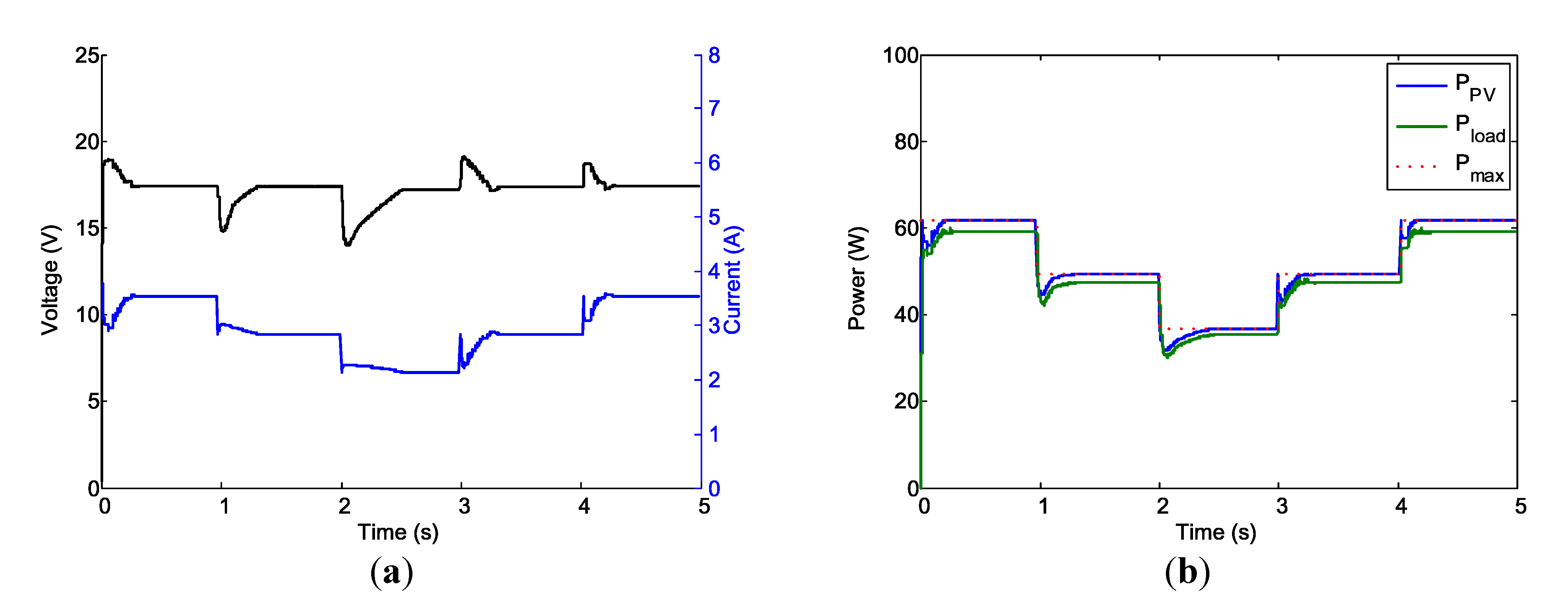
Circuit simulations for irradiation variations using Zeta and four-switch type converters were also conducted. The results are presented in
Figure 19 and
Figure 20. The results also show that maximum power points are reached.
In summary, we have successfully developed and conducted the circuit simulation for solar power MPPT system using three different buck-boost converter topologies. We almost perfectly reach the maximum power point in all of the simulations.
Figure 19.
Circuit simulation for irradiation variations using Zeta converter. (a) Voltage and current from PV model; (b) Power output from PV model and power at the load terminal.
Figure 19.
Circuit simulation for irradiation variations using Zeta converter. (a) Voltage and current from PV model; (b) Power output from PV model and power at the load terminal.
Figure 20.
Circuit simulation for irradiation variations using four-switch type converter. (a) Voltage and current from PV model; (b) Power output from PV model and power at the load terminal.
Figure 20.
Circuit simulation for irradiation variations using four-switch type converter. (a) Voltage and current from PV model; (b) Power output from PV model and power at the load terminal.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















