
Mechanism Analysis and Experimental Validation of Employing Superconducting Magnetic Energy Storage to Enhance Power System Stability



Abstract
:1. Introduction
2. Model of SMES and SMIB System with SMES
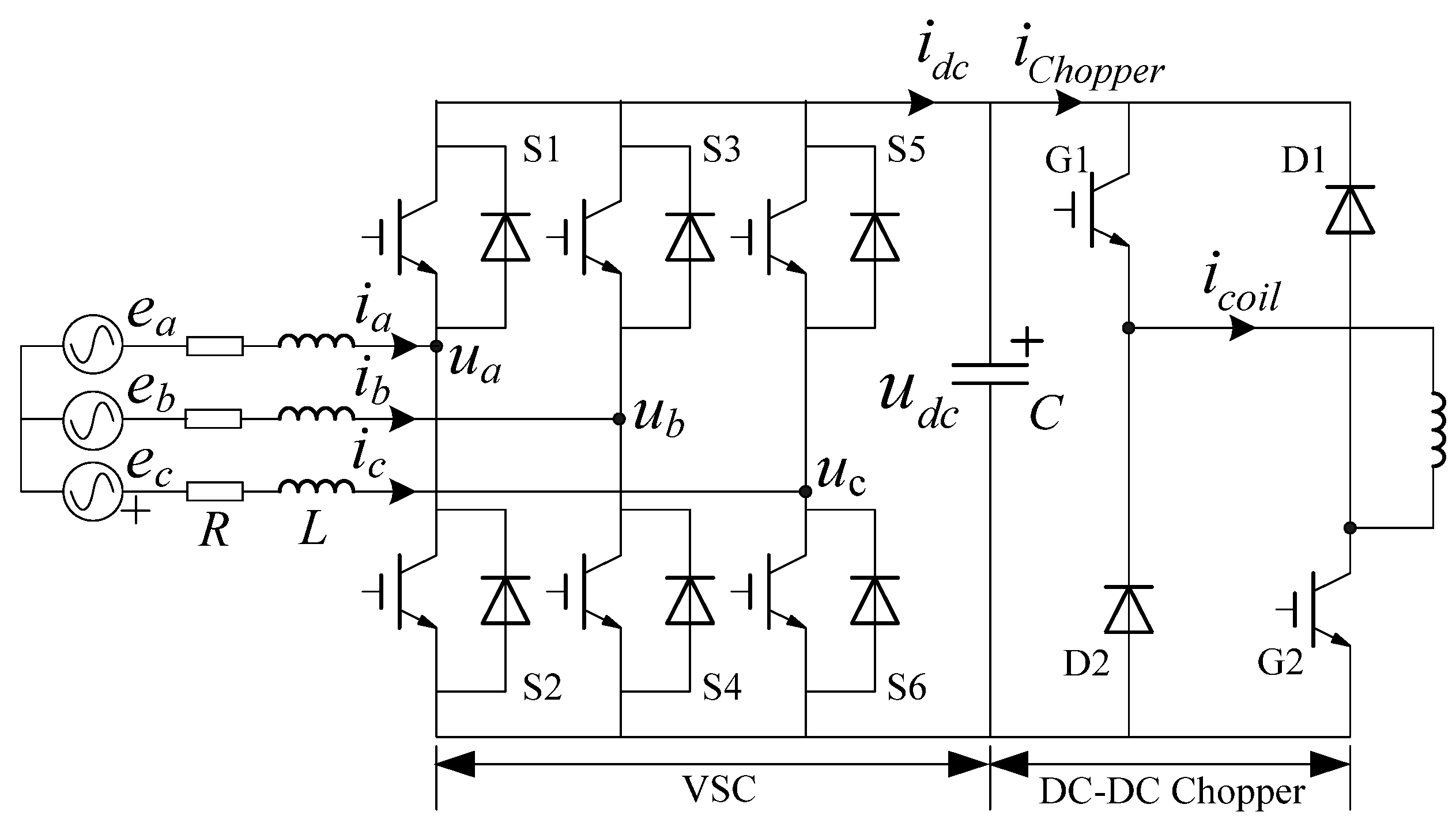
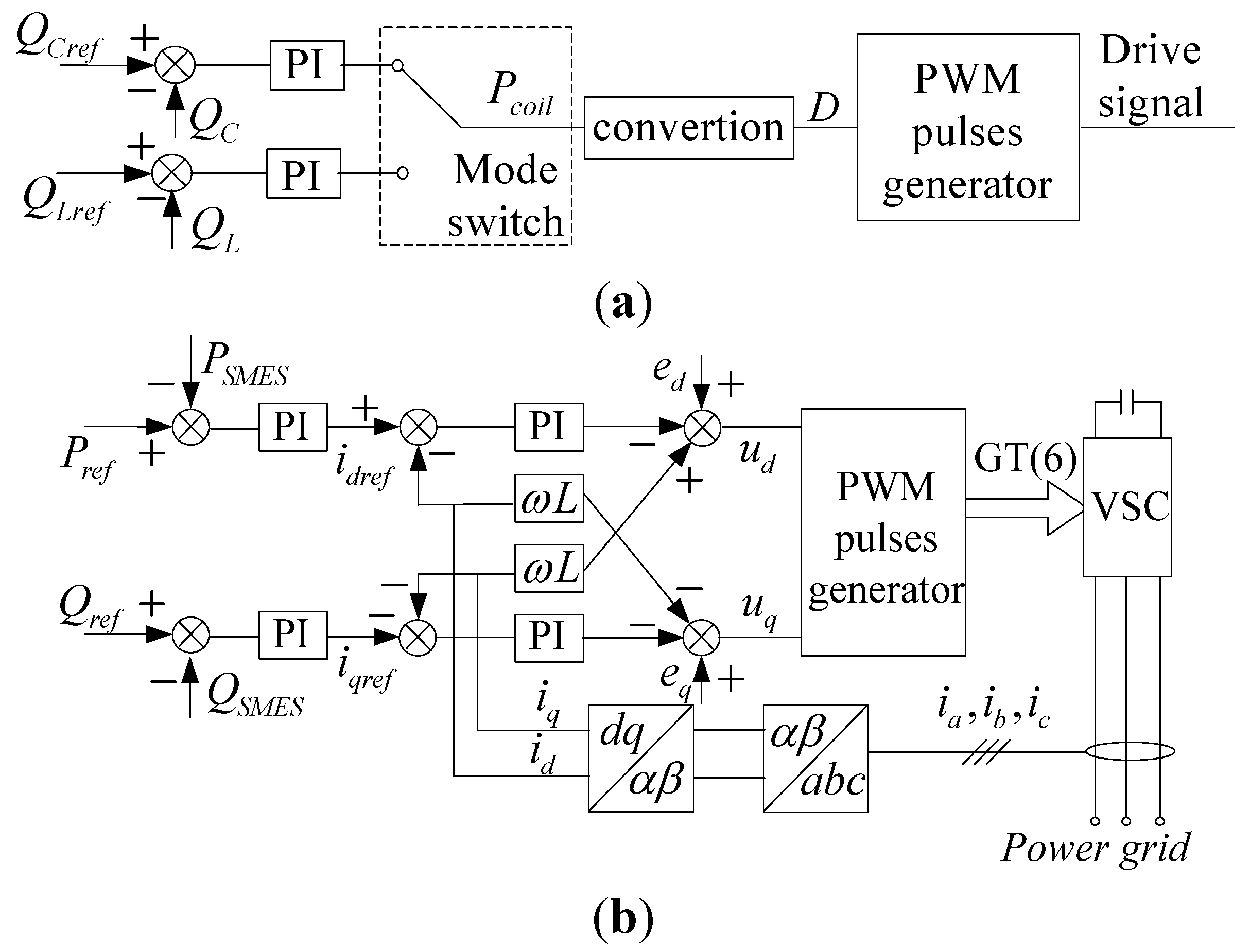
2.1. Topology and Model of SMES


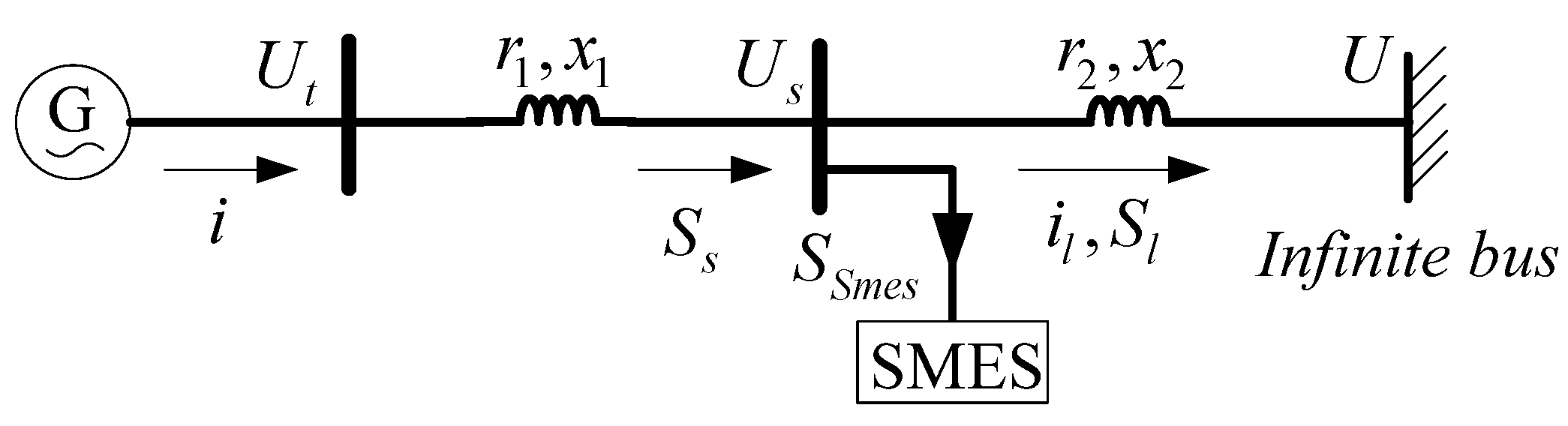
2.2. Small Signal Model of the SMIB System with SMES

3. Mechanism Analysis of Employing SMES to Enhance Power System Stability
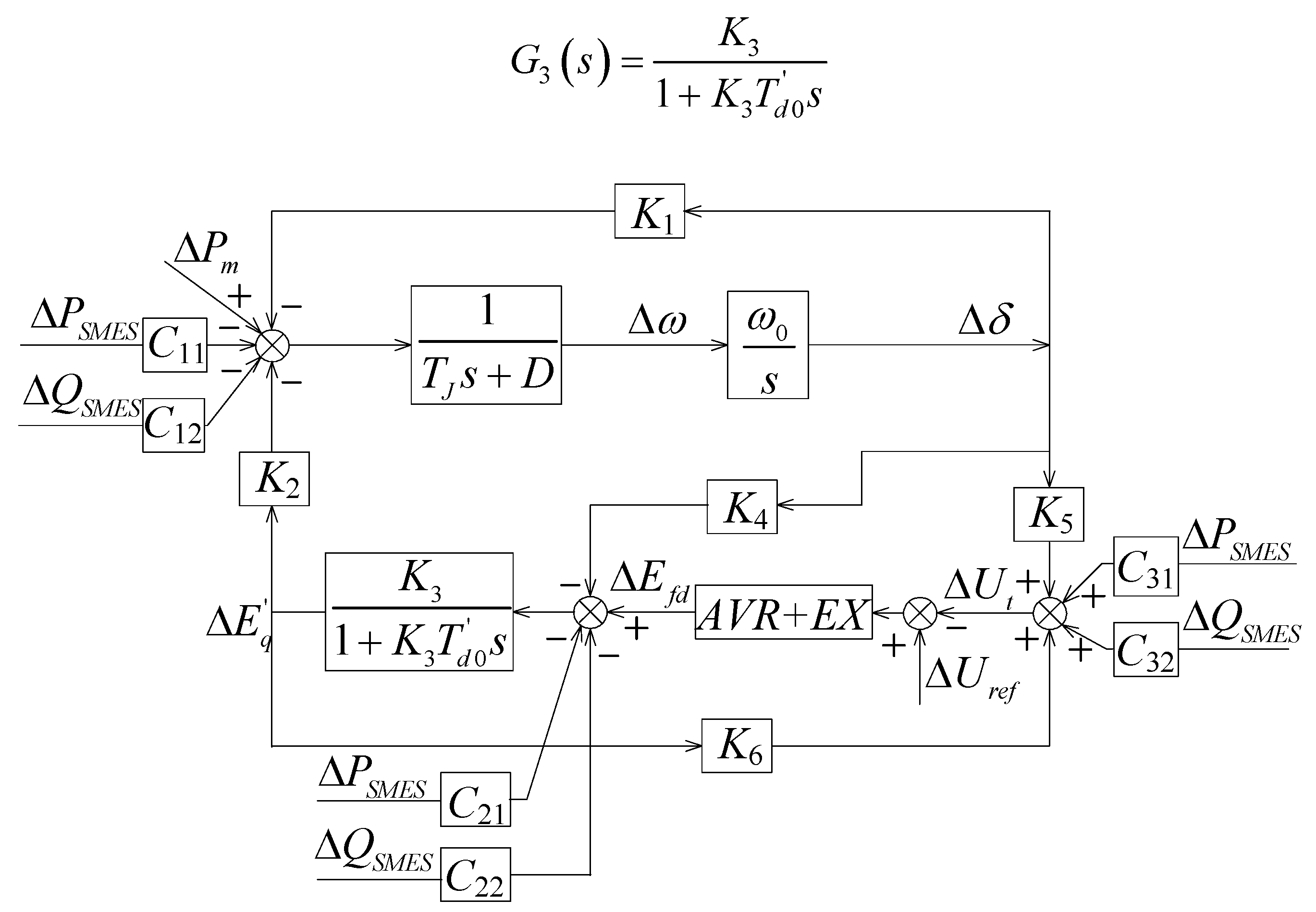
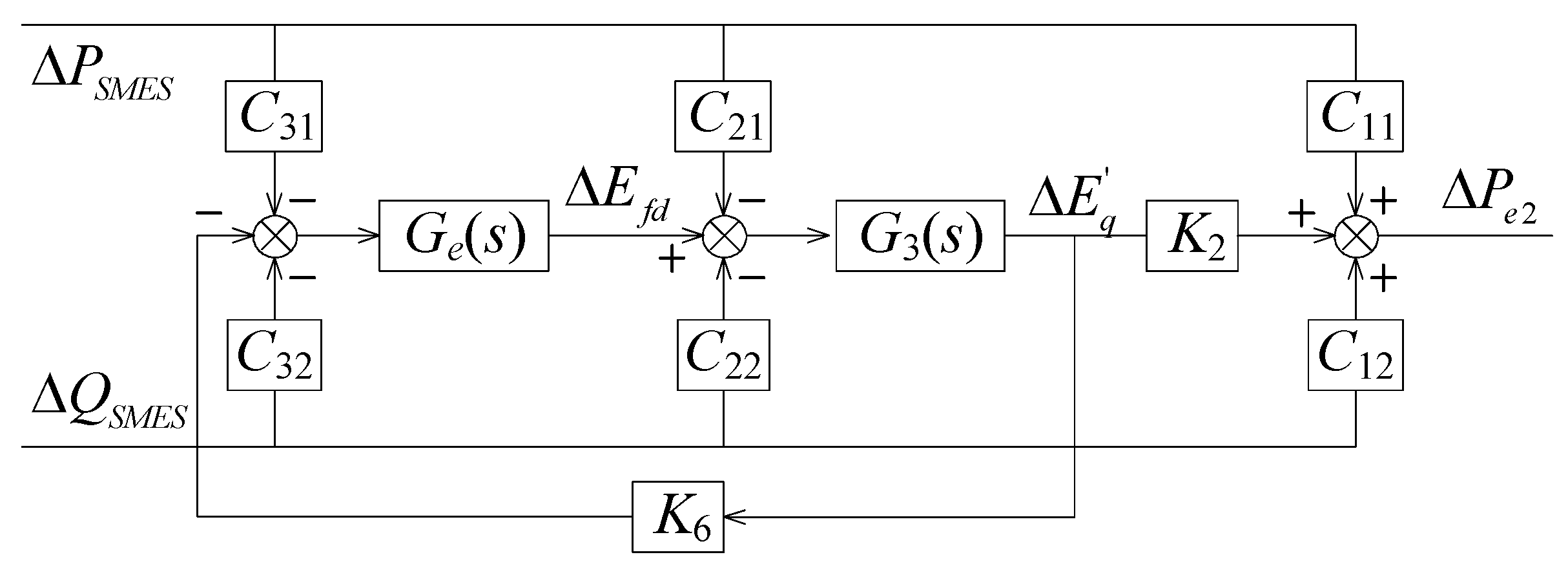
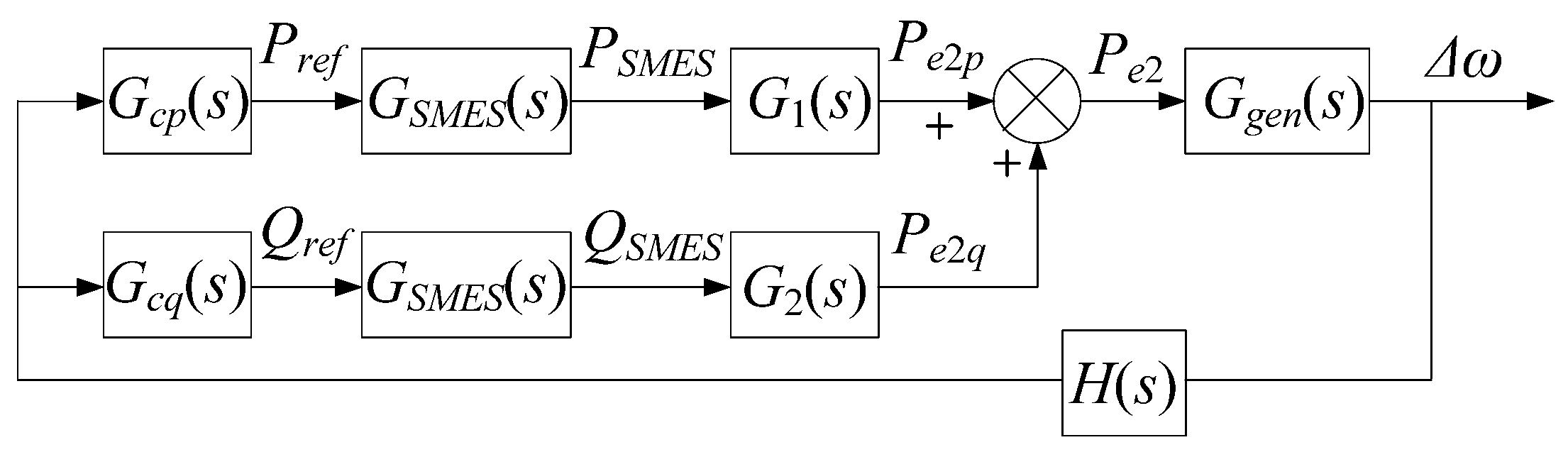
3.1. Transfer Function Derivation


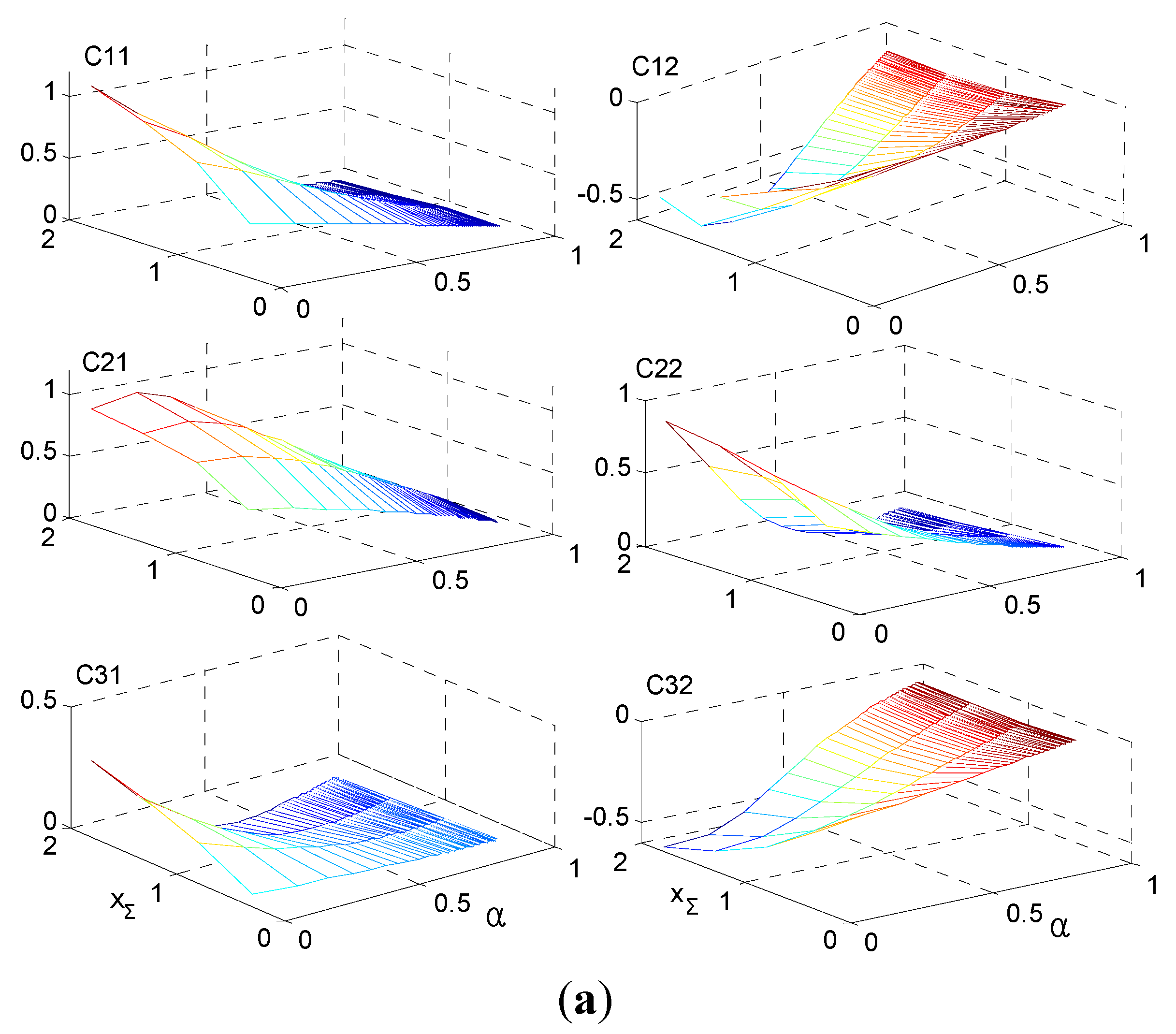
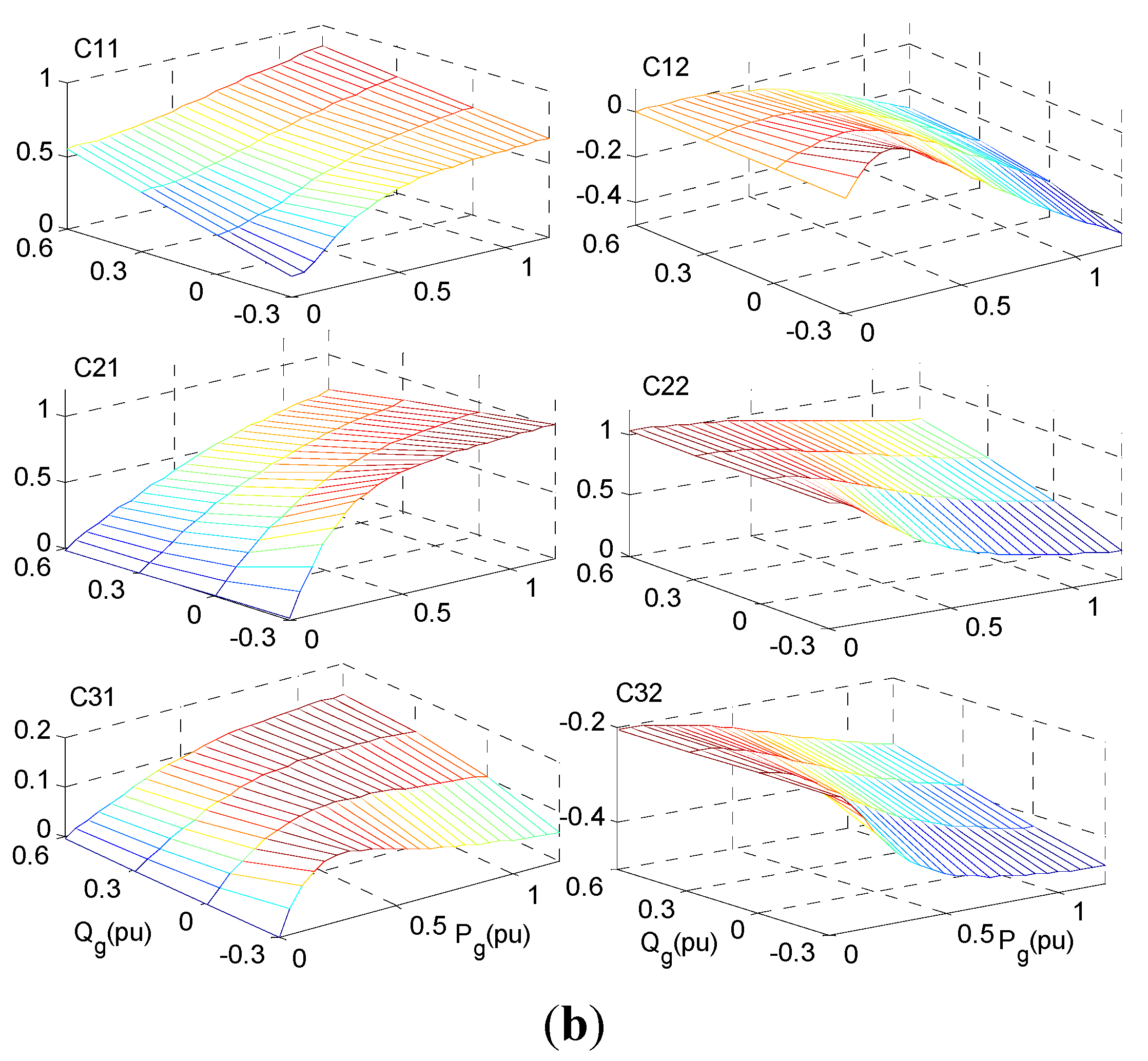
3.2. Characteristic Analysis of Cii


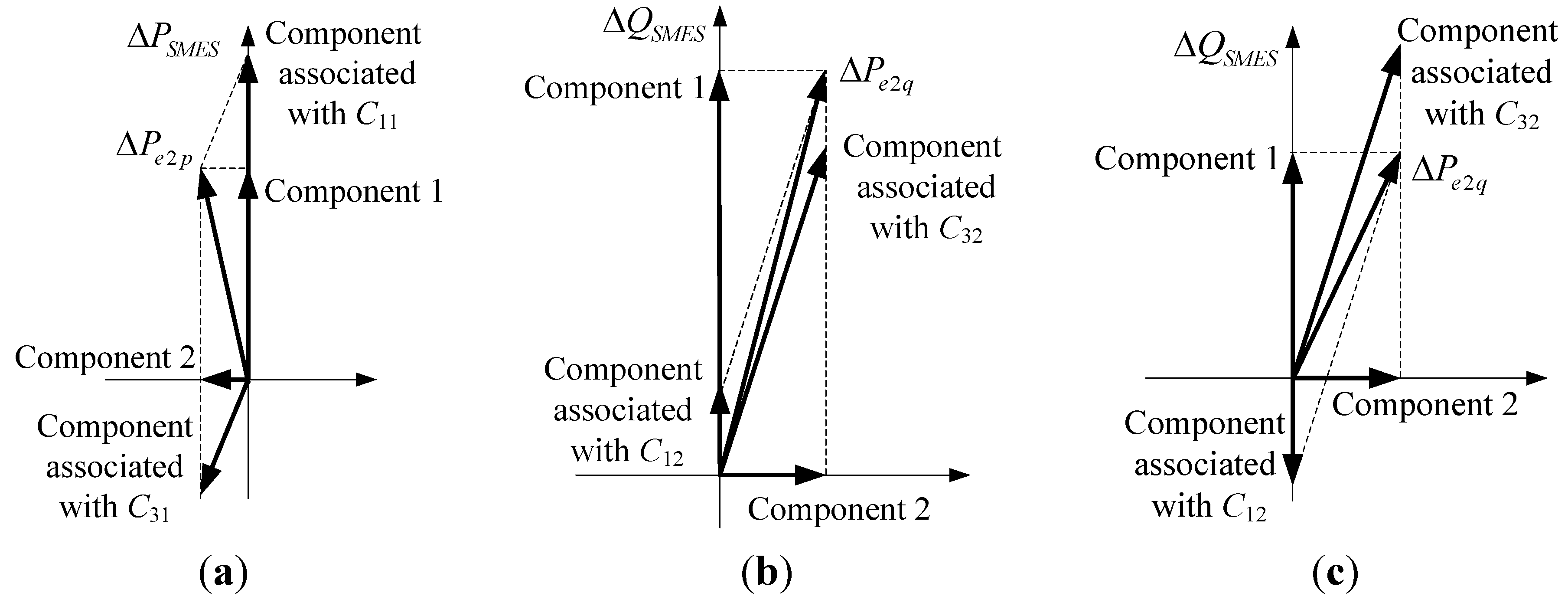
3.3. Efficacy of SMES on the Generator

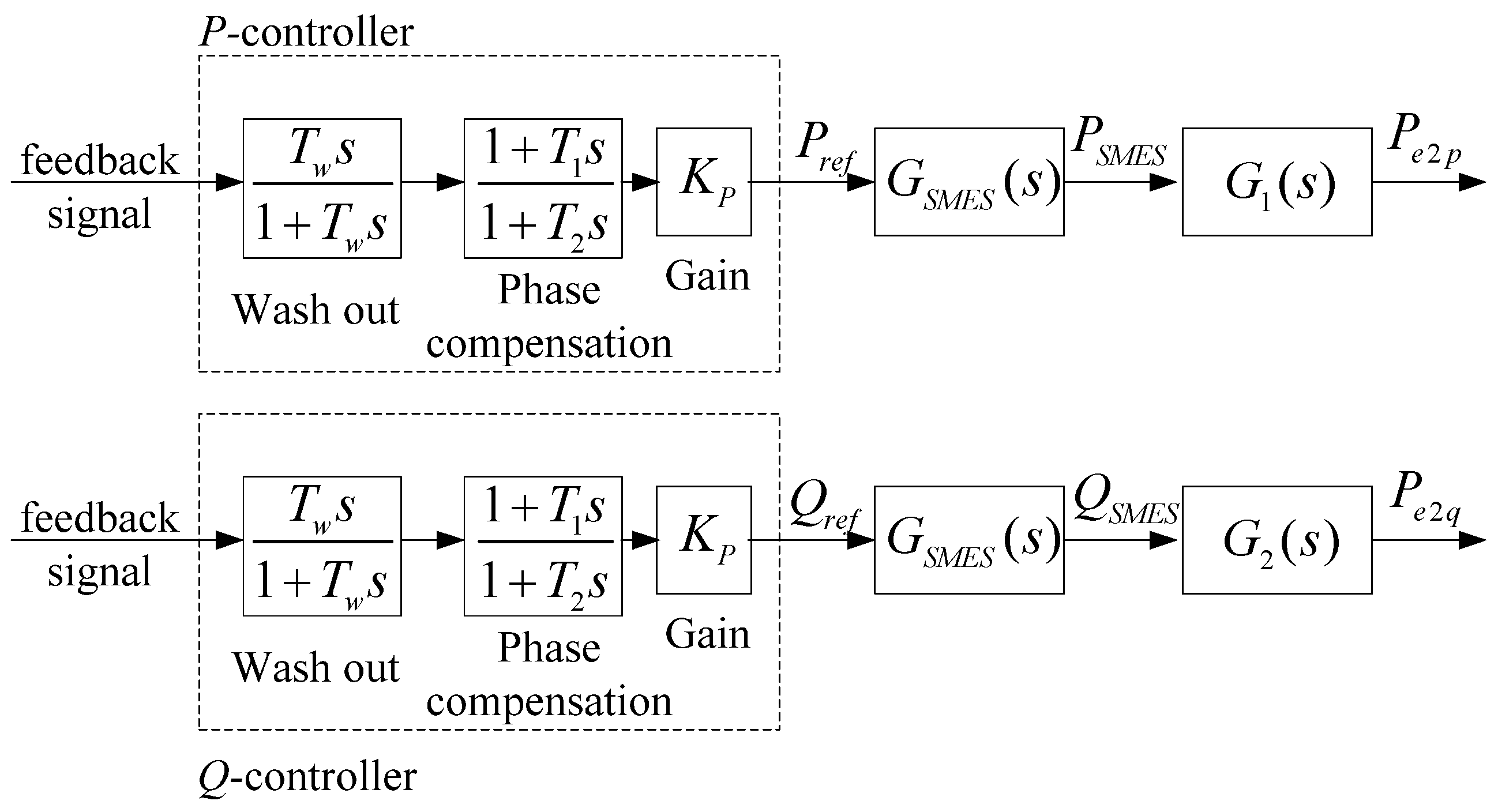
4. SMES-Based Damping Controllers Design
4.1. Controller Structure and Parameters Determination


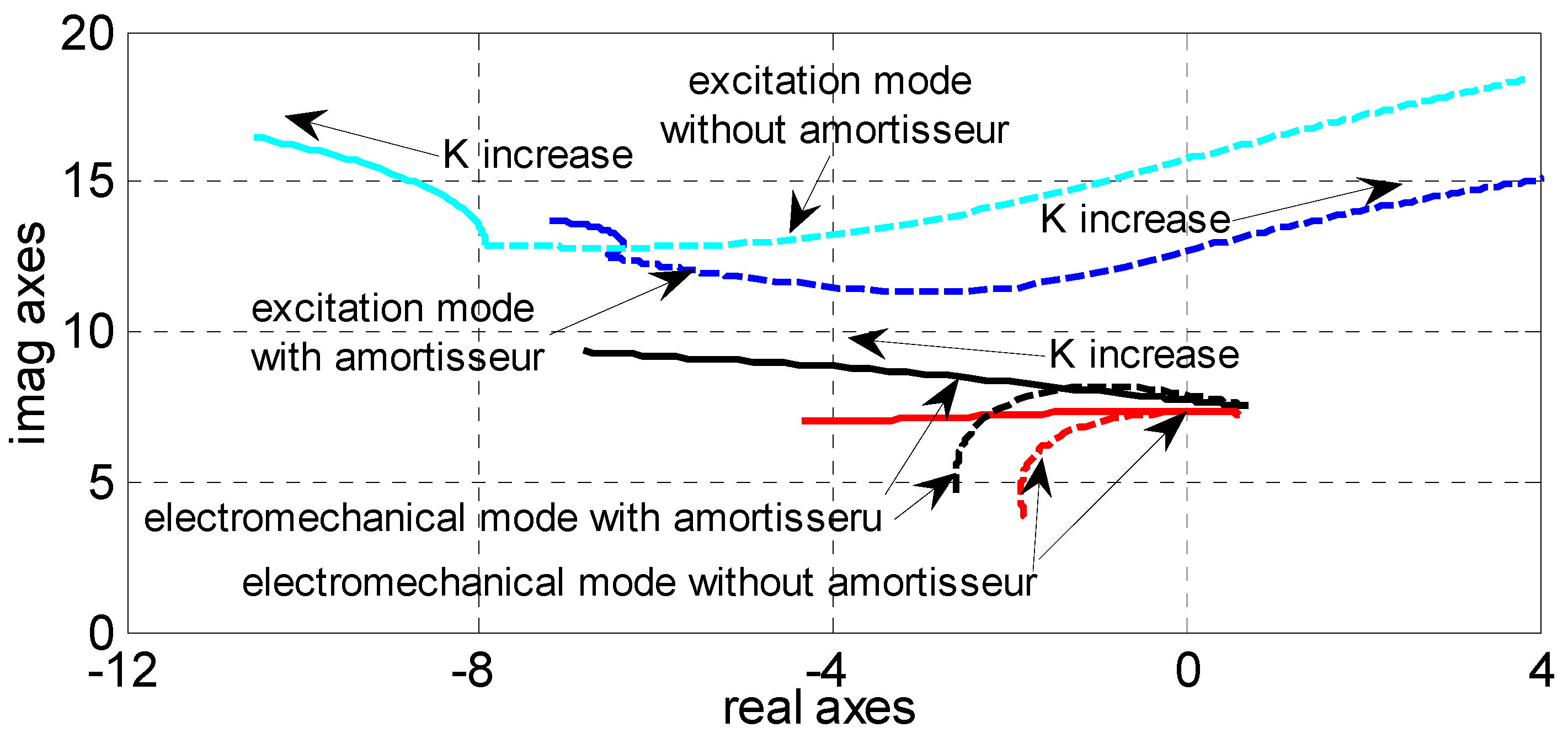
4.2. Effect of Amortisseur
- (1)
- Generator output: Pg = 0.9 pu, Qg = 0.3 pu;
- (2)
- Grid connected reactance: x1 = 0, x2 = 0.65;
- (3)
- Parameters of the P-controller: Tw = 1.4 s, T1 = 0.08 s, T2 = 0.24 s;
- (4)
- Parameters of the Q-controller: Tw = 1.4 s, T1 = 0.3 s, T2 = 0.06 s;
- (5)
- Detailed parameters of the generator and the excitation system are given in the Appendix.

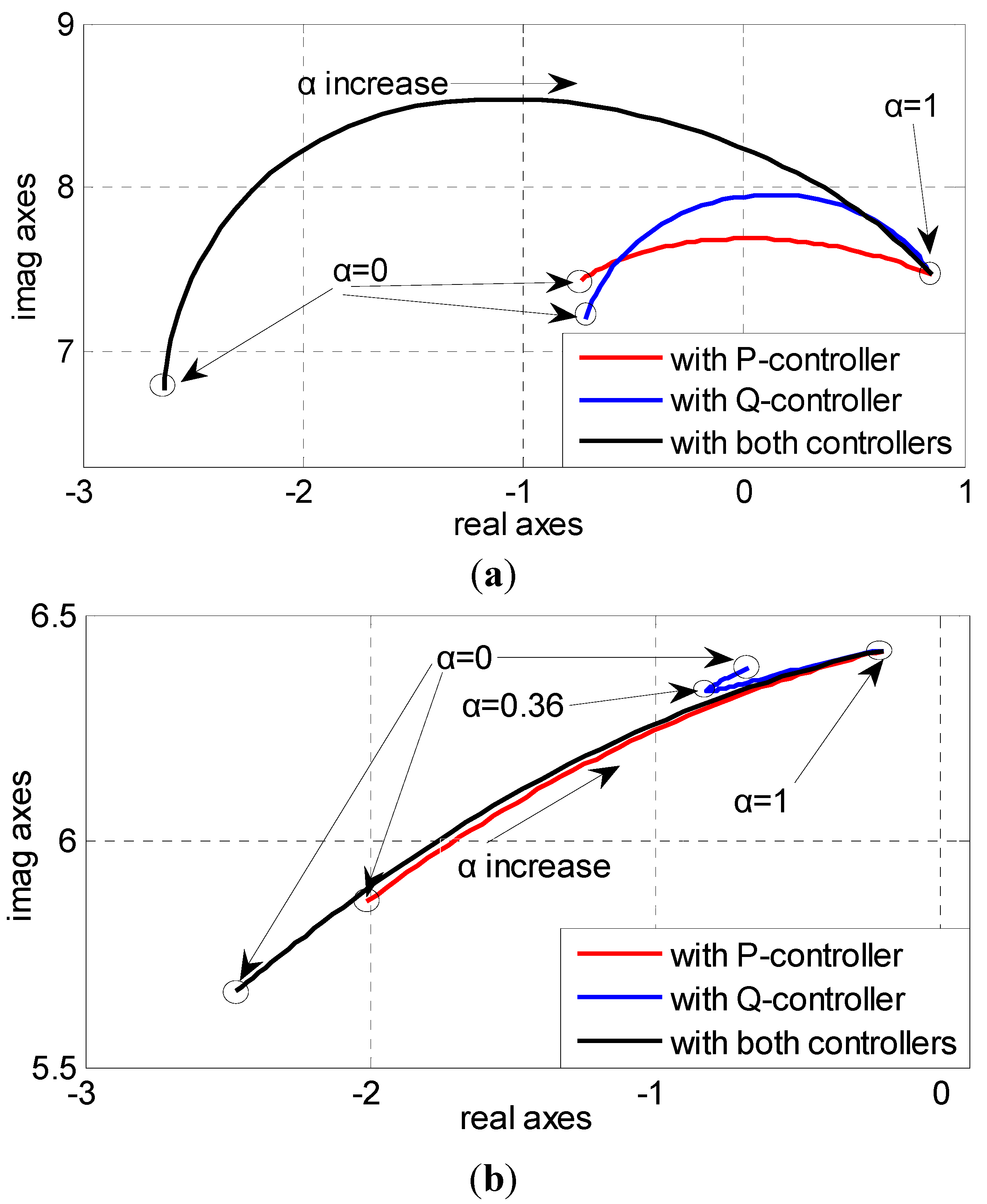
4.3. Influence Factors in Terms of Damping Improvement
4.3.1. Influence of SMES Location

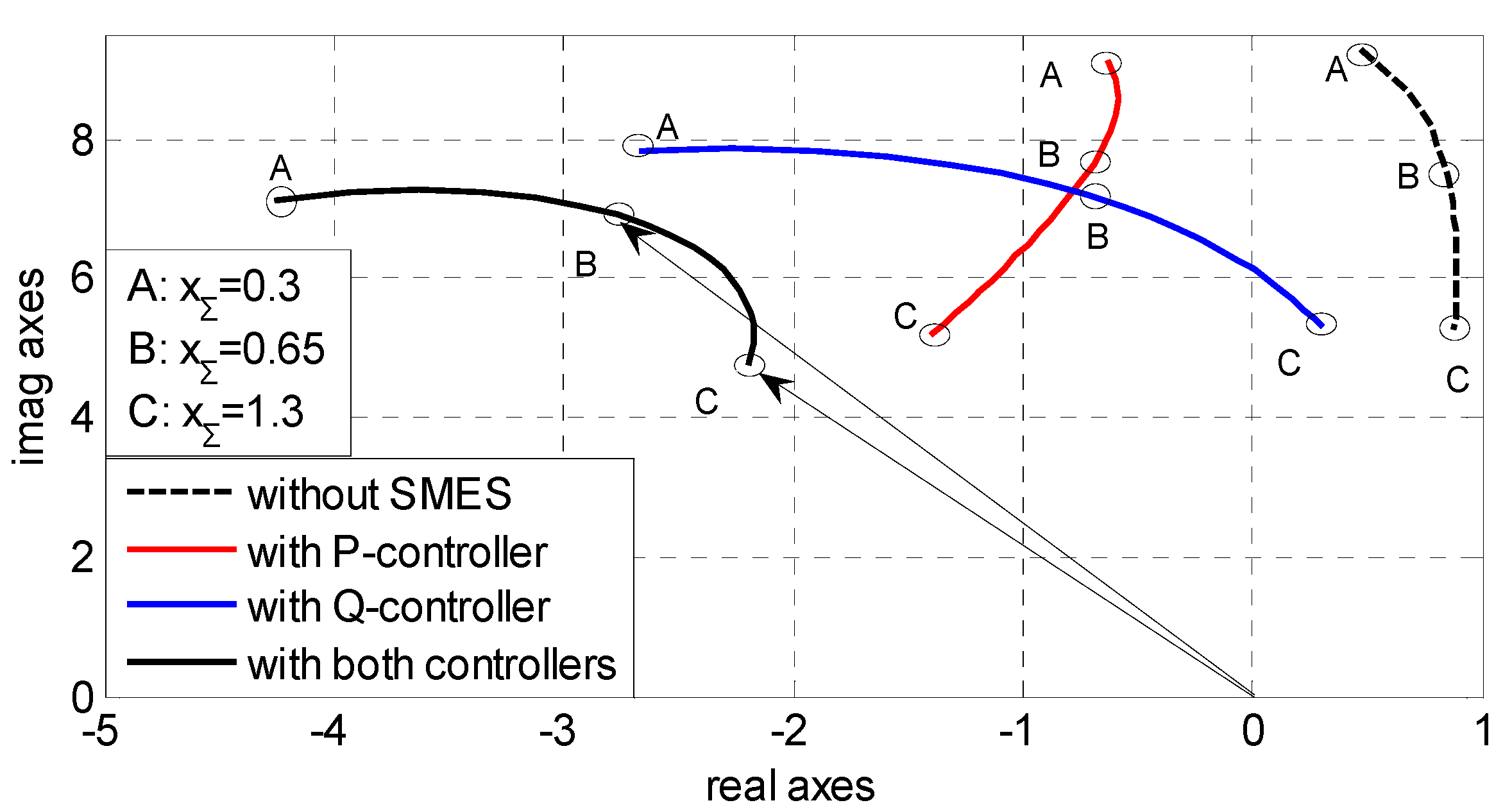
4.3.2. Influence of Transmission Reactance

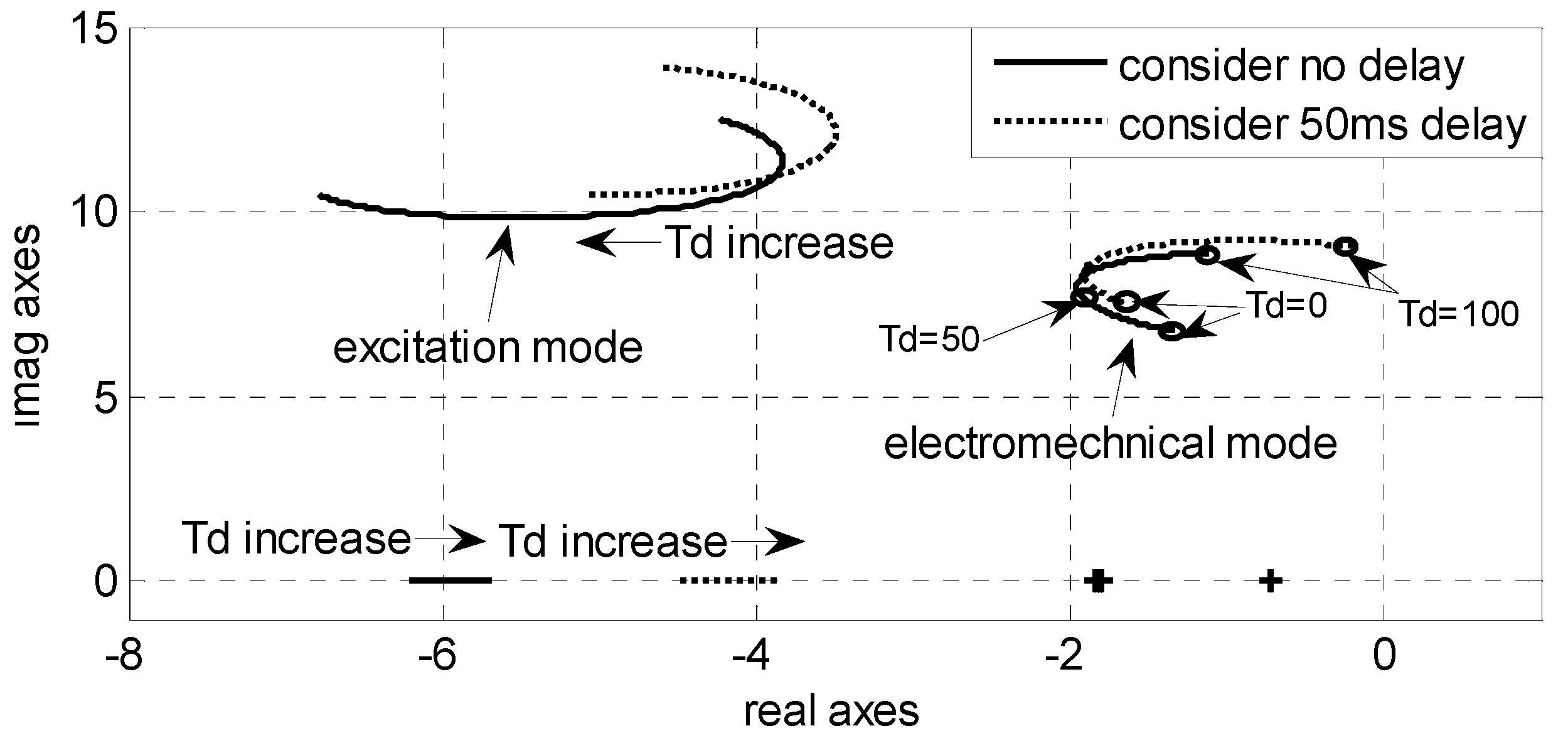
4.3.3. Influence of SMES Dynamic Characteristics

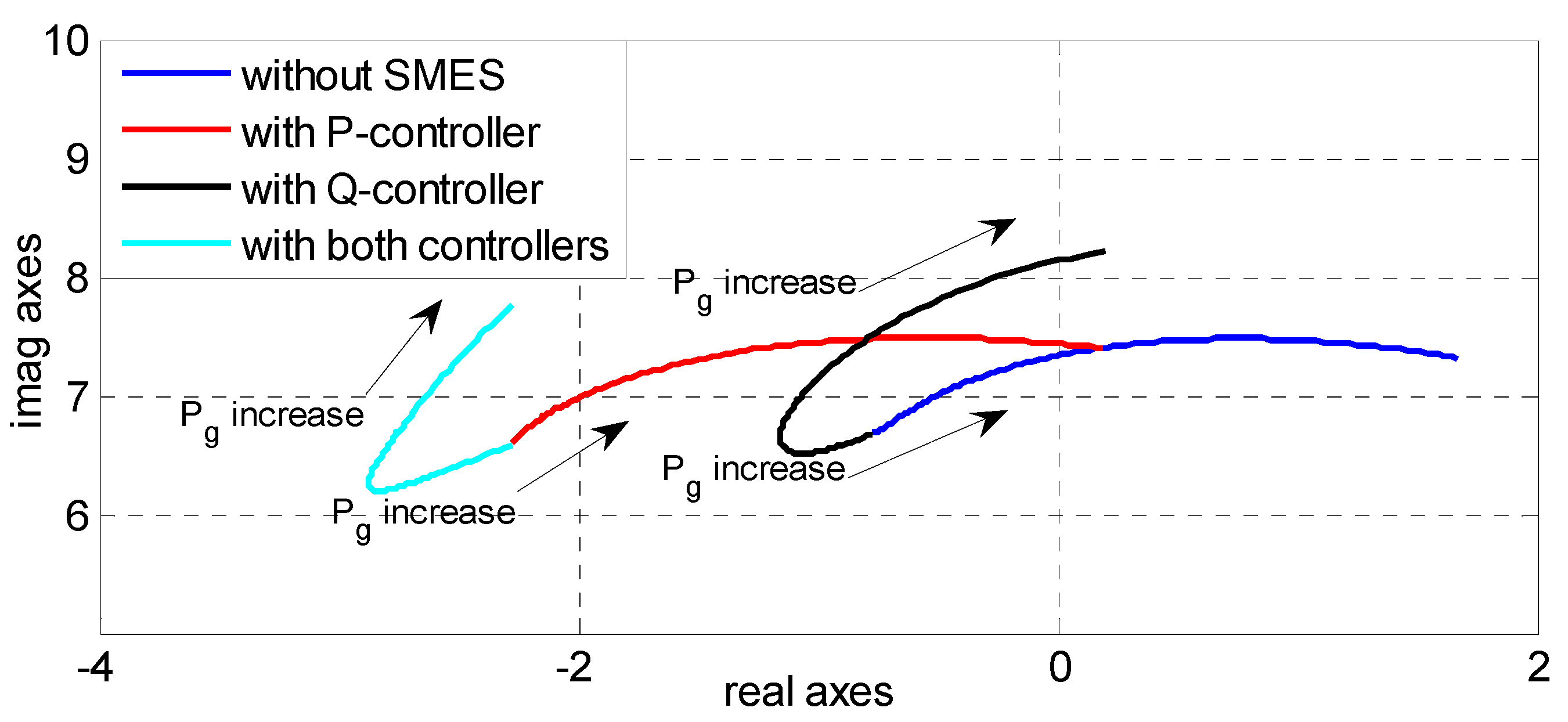
4.3.4. Influence of Generator Output

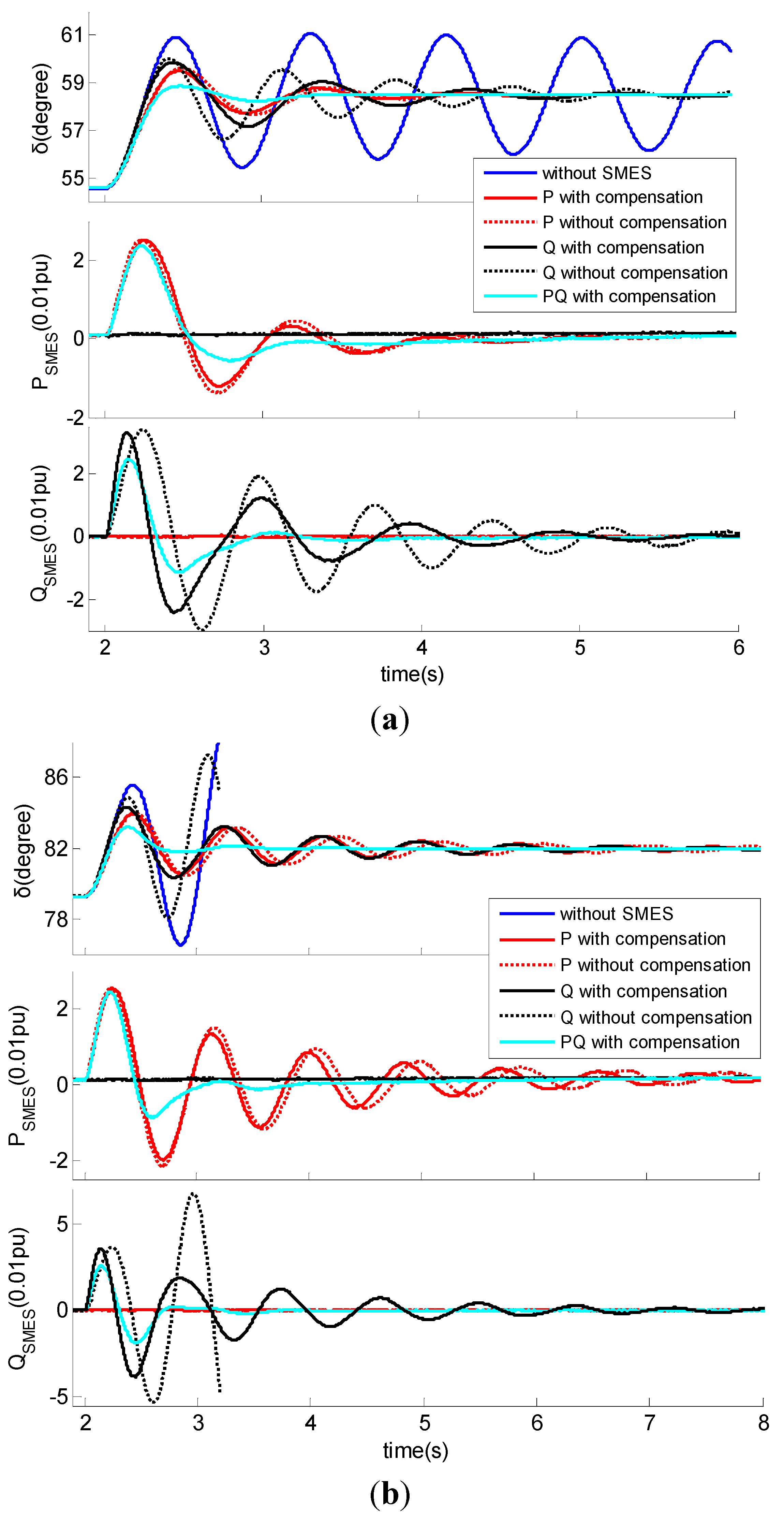
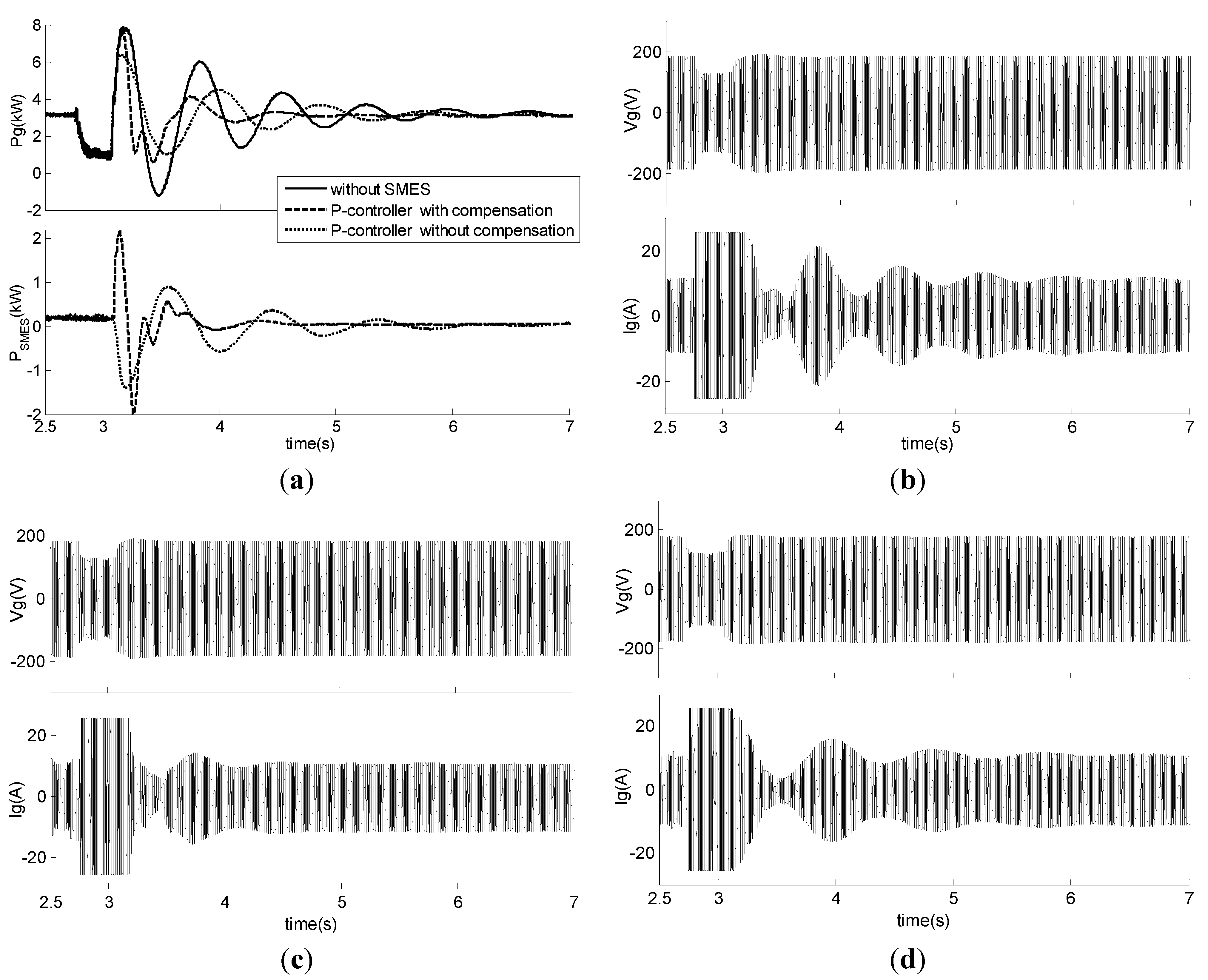
5. Simulation Results
- Scenario 1: Pg = 0.5 pu, Qg = 0.16 pu;
- Scenario 2: Pg = 0.85 pu, Qg = 0.265 pu.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Different Controllers | Washout Block | Compensation Block | Gain Block | Effective Gain * | ||
|---|---|---|---|---|---|---|
| Tw | T1 | T2 | Kp | Keff | ||
| P-controller | with compensation (1 block) | 1.4 s | 0.1071 s | 0.1757 s | 44 | 34.3 |
| without compensation | 1.4 s | – | 35 | 34.3 | ||
| Q-controller | with compensation (2 blocks) | 1.4 s | 0.2478 s | 0.0765 s | 12.6 | 40.8 |
| without compensation | 1.4 s | – | 41 | 40.8 | ||
| Both P and Q control with compensation | P-controller (1 block compensation) | 1.4 s | 0.1071 s | 0.1757 s | 44 | 34.3 |
| Q-controller (2 blocks compensation) | 1.4 s | 0.3014 s | 0.0624 s | 17.8 | 40.8 | |

| Different Controllers | Scenario 1 | Scenario 2 | |||||
|---|---|---|---|---|---|---|---|
| Eigenvalues | ξ | ω d (Hz) | Eigenvalues | ξ | ω d (Hz) | ||
| Without SMES | −0.10 ± j 7.29 | 0.014 | 1.16 | 0.85 ± j 7.47 | −0.114 | 1.20 | |
| P-controller | with compensation | −1.74 ± j 7.14 | 0.244 | 1.14 | −0.74 ± j 7.44 | 0.099 | 1.18 |
| without compensation | −1.58 ± j 6.65 | 0.237 | 1.06 | −0.65 ± j 7.02 | 0.093 | 1.12 | |
| Q-controller | with compensation | −1.06 ± j 6.64 | 0.16 | 1.06 | −0.72 ± j 7.19 | 0.102 | 1.15 |
| without compensation | −0.32 ± j 8.6 | 0.117 | 1.38 | 0.74 ± j 8.99 | −0.082 | 1.43 | |
| P-controller and Q-controller with compensation | −2.36 ± j 6.13 | 0.46 | 1.0 | −2.70 ± j 6.79 | 0.4 | 1.08 | |
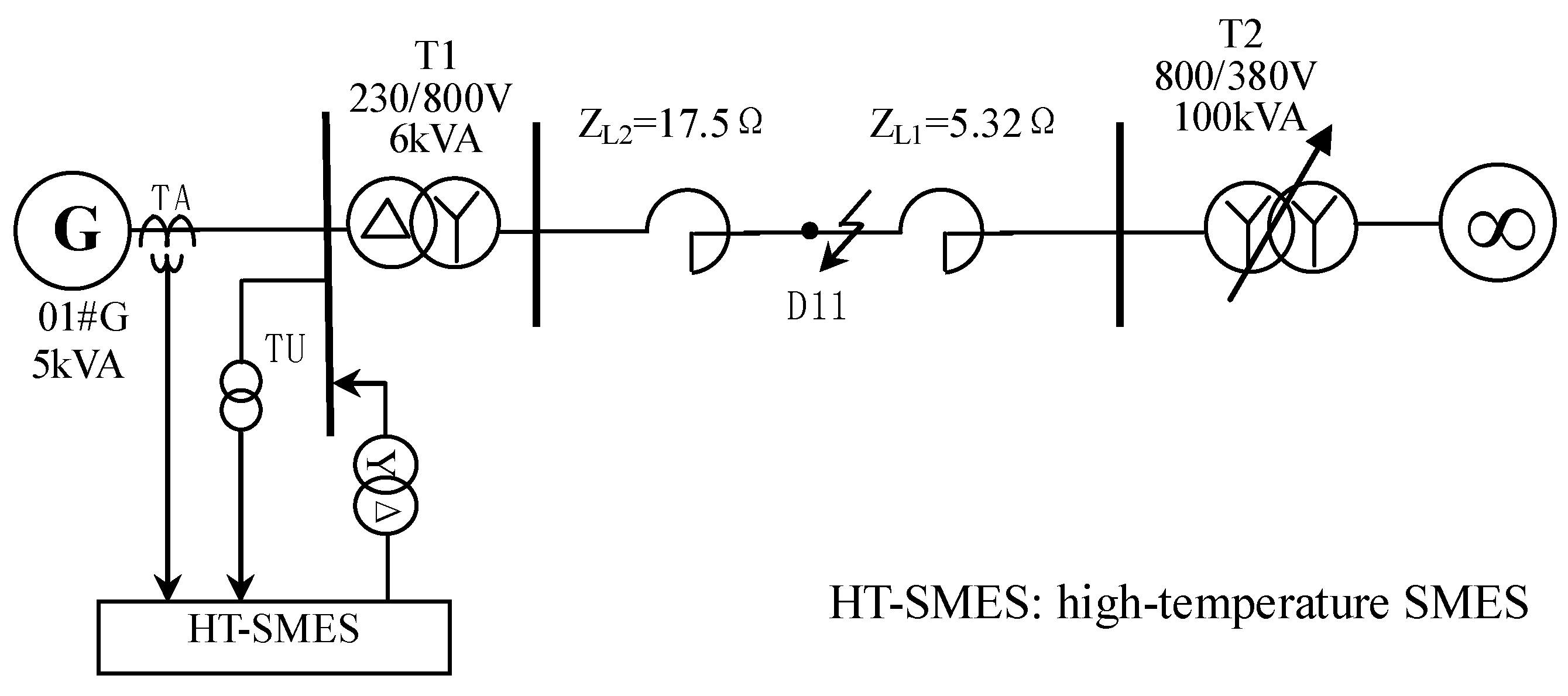
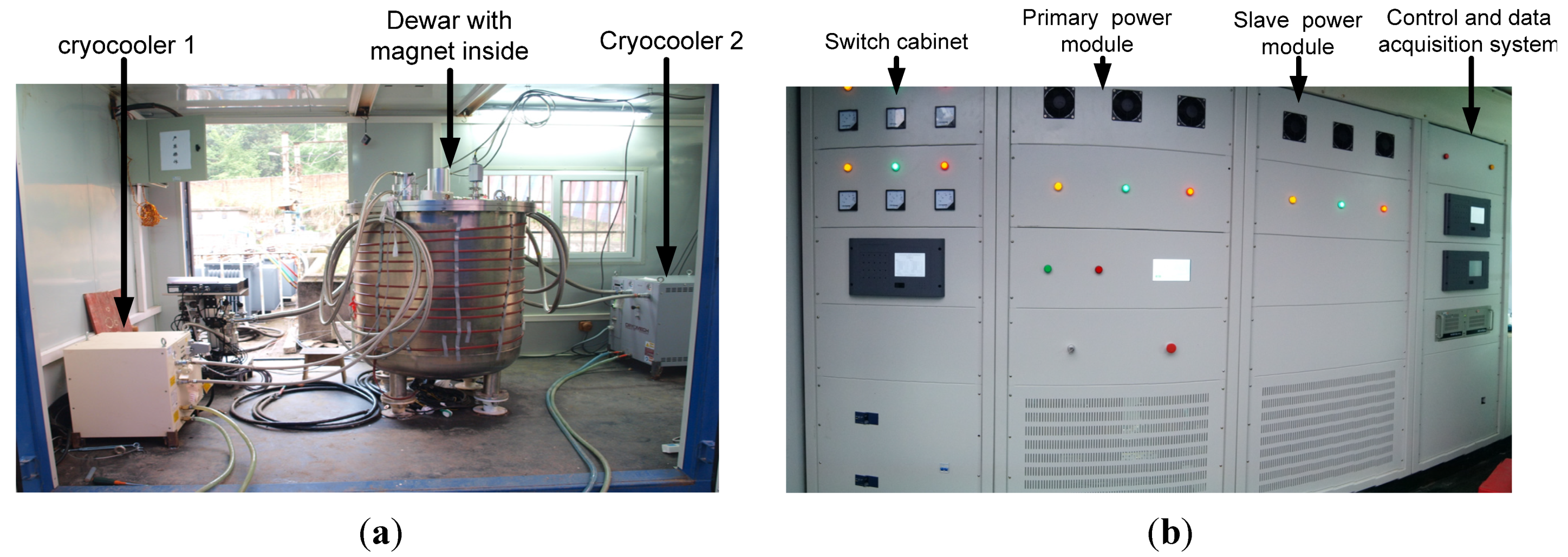
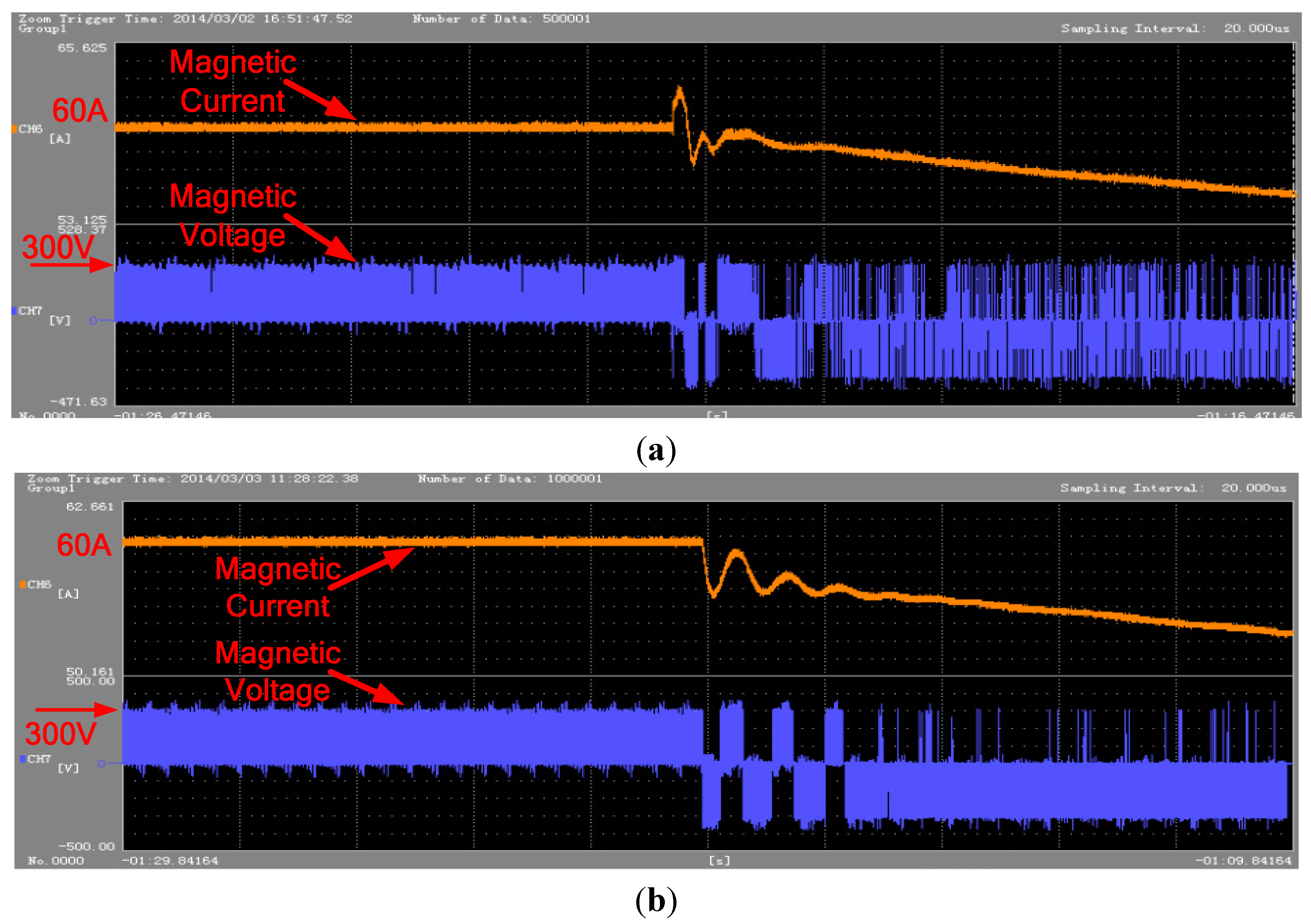
6. Experimental Validation


| Rating Energy | Maximum Active Power | Rating DC Current | Rating DC Voltage | Rating AC Voltage | Inductance of Coil | Rating Temperature | Coil Structure | Height of Coil |
|---|---|---|---|---|---|---|---|---|
| 150 kJ | 100 kW | 175 A | 600 V | 300 V | 9.7 H | 20 K | single-solenoid | 210.99 mm |



7. Conclusions
Acknowledgments
Author Contributions
Nomenclature
| R, L | equivalent parameters of the AC source |
| ea, eb, ec | instantaneous value of source fundamental voltages |
| ia, ib, ic | instantaneous value of source fundamental currents |
| ua, ub, uc | instantaneous value of inverter fundamental voltages |
| ed, eq | dq components of source fundamental voltages |
| id, iq | dq components of source fundamental currents |
| Md, Mq | dq components of modulation index |
| ω | frequency of the AC source |
| udc | voltage of the capacitor |
| idc | current from the three-phase bridge to the capacitor |
| iChopper | current from the capacitor to the chopper |
| icoil | current of the superconductive coil |
| QC, QCref | energy stored in the capacitor and its reference |
| QL, QLref | energy of the superconductive coil and its reference |
| PSMES, QSMES | AC power of SMES |
| Pcoil | power of the superconductive magnet |
| idref, iqref | dqcomponents of the reference current |
| Pref, Qref | dq components of the reference power |
| D | duty cycle in the chopper controller |
| ξi | damping of the current loop of the VSC controller |
| TΣi, TΣp | total time constant of the current control loop and the power control loop of the VSC controller |
| Ra | stator resistance |
| xd, x'd, x''d | synchronous, transient and sub-transient reactance in d axes |
| xq, x'q, x''q | synchronous, transient and sub-transient reactance in q axes |
| TM | mechanical start time |
| T'd0, T''d0 | d axes transient and sub-transient time constant with stator open |
| T'q0, T''q0 | q axes transient and sub-transient time constant with stator open |
| r1, x1 | line parameters from SMES to the generator |
| r2, x2 | line parameters from SMES to the infinite bus |
| α | location factor of SMES |
| Eq, E'q | no load and transient potential |
| Ut, utd, utq | generator terminal voltage and its dq components |
| Us, usd, usq | SMES voltage and its dq components |
| U, utd, utq | infinite bus voltage and its dq components |
| i, id, iq | generator current and its dq components |
| il, ild, ilq | infinite bus current and its dq components |
| Ss, Ps, Qs | power flow from the generator to the SMES installation point |
| Sl, Pl, Ql | power flow from the SMES installation point to the infinite bus |
| SSMES, PSMES, QSMES | power of SMES |
| Pe | electromagnetic power of the generator |
| Pm | mechanical power of the generator |
| Pg, Qg | output power of the generator terminal |
| ΔPe2 | deviation power of the generator produced by SMES power regulation |
| δ | rotor angle of the generator |
| ω | rotor angular velocity of the generator |
| KA, TE | gain and time constant of the excitation system |
| Ge | transfer function of the excitation system |
| G3 | transfer function of the field coil |
| Ggen | transfer function from Pe to ω |
| GSMES | transfer function of SMES dynamics |
| G1 | transfer function from ΔPSMES to ΔPe2 |
| G2 | transfer function from ΔQSMES to ΔPe2 |
| Gcp | transfer function of the active power controller |
| Gcq | transfer function of the reactive power controller |
Appendix
Conflicts of Interest
References
- Kanchanaharuthai, A.; Vira, C.; Loparo, K.A. Transient stability and voltage regulation in multimachine power systems Vis-à-Vis STATCOM and battery energy storage. IEEE Trans. Power Syst. 2014, 29, 1–13. [Google Scholar] [CrossRef]
- Hassenzahl, W.V.; Hazelton, D.W.; Johnson, B.K.; Komarek, P.; Noe, M.; Reis, C.T. Electric power applications of superconductivity. Proc. IEEE 2004, 92, 1655–1674. [Google Scholar] [CrossRef]
- Hasan, A.M.; Wu, B.; Dougal, R.A. An overview of SMES applications in power and energy systems. IEEE Trans. Sustain. Energy 2010, 1, 38–47. [Google Scholar] [CrossRef]
- Rodríguez, A.; Huerta, F.; Bueno, E.J.; Rodríguez, F.J. Analysis and performance comparison of different power conditioning systems for SMES-based energy systems in wind turbines. Energies 2013, 6, 1527–1553. [Google Scholar] [CrossRef]
- Boenig, H.J.; Hauer, J.F. Commissioning tests of the Bonneville power administration 30 MJ superconducting magnetic energy storage unit. IEEE Trans. Power App. Syst. 1985, 104, 302–312. [Google Scholar] [CrossRef]
- Kim, H.J.; Seong, K.C.; Cho, J.W.; Bae, J.H.; Sim, K.D.; Kim, S.; Lee, E.Y.; Ryu, K.; Kim, S.H. 3 MJ/750 kVA SMES system for improving power quality. IEEE Trans. Appl. Supercond. 2006, 16, 574–577. [Google Scholar] [CrossRef]
- Zhang, J.Y.; Dai, S.T.; Zhang, D.; Wang, Z.; Zhang, F.; Song, N.; Xu, X.; Zhang, Z.; Zhu, Z.; Gao, Z.; et al. Construction, testing and operation of a 1 MJ HTS magnet at a 10.5 kV superconducting power substation. IEEE Trans. Appl. Supercond. 2012, 22, 504–507. [Google Scholar]
- Fang, J.K.; Wen, J.Y.; Wang, S.R.; Shi, J.; Ren, L.; Tang, Y.J.; Peng, X.T.; Chen, Z. Laboratory and field tests of movable conduction cooled high temperature SMES for power system stability enhancement. IEEE Trans. Appl. Supercond. 2013, 23, 1607–1615. [Google Scholar]
- Zhang, N.; Gu, W.; Yu, H.J.; Liu, W. Application of coordinated SOFC and SMES robust control for stabilizing tie-line power. Energies 2013, 6, 1902–1917. [Google Scholar] [CrossRef]
- Kopylov, S.; Balashov, N.; Ivanov, S.; Veselovsky, A.; Zhemerikin, V. Use of superconducting devices operating together to ensure the dynamic stability of electric power system. IEEE Trans. Appl. Supercond. 2011, 21, 2135–2139. [Google Scholar] [CrossRef]
- Shi, J.; Tang, Y.J.; Xia, Y.J.; Ren, L.; Li, J.D.; Jiao, F.S. Energy function based SMES controller for transient stability enhancement. IEEE Trans. Appl. Supercond. 2012, 22, 2135–2139. [Google Scholar] [CrossRef]
- Du, W.; Wang, H.F.; Cheng, S.; Wen, J.Y.; Dunn, R. Robustness of damping control implemented by energy storage systems installed in power systems. Int. J. Electr. Power Energy Syst. 2011, 33, 35–42. [Google Scholar] [CrossRef] [Green Version]
- Mitani, Y.; Tsuji, K.; Murakami, Y. Application of superconducting magnetic energy storage to improve power system dynamic performance. IEEE Trans. Power Syst. 1988, 3, 1418–1425. [Google Scholar] [CrossRef]
- Pal, B.C.; Coonick, A.H.; Macdonnld, D.C. Robust damping controller design in power systems with superconducting magnetic energy storage devices. IEEE Trans. Power Syst. 2000, 15, 320–325. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Mei, S.W.; Xia, D.M.; Ma, Y.J.; Jiang, X.H.; Lu, Q. Experimental evaluation of nonlinear robust control for SMES to improve the transient stability of power systems. IEEE Trans. Energy Convers. 2004, 19, 774–782. [Google Scholar] [CrossRef]
- Wan, Y.; Zhao, J. Extended backstepping method for single-machine infinite-bus power systems with SMES. IEEE Trans. Control Syst. Technol. 2013, 21, 915–923. [Google Scholar] [CrossRef]
- Shi, J.; Tang, Y.J.; Ren, L.; Li, J.D.; Cheng, S.J. Discretization based decoupled state-feedback control for current source power conditioning system of SMES. IEEE Trans. Power Deliv. 2008, 23, 2097–3004. [Google Scholar] [CrossRef]
- Yang, Y.; Kazerani, M.; Quintana, V.H. Modeling, control and implementation of three-phase PWM converters. IEEE Trans. Power Electron. 2003, 18, 857–864. [Google Scholar] [CrossRef]
- Chen, B.S. Electric Drive Control Technology, 3rd ed.; China Machine Press: Beijing, China, 2003; pp. 59–84. [Google Scholar]
- EI-Sherbing, M.K.; Mehta, D.M. Dynamic system stability: Part I—Investigation of the effect of different loading and excitation system. IEEE Trans. Power Appl. Syst. 1973, 92, 1538–1546. [Google Scholar] [CrossRef]
- DeMello, F.P.; Concordia, C. Concept of synchronous machine stability as affected by excitation control. IEEE Trans. Power Appl. Syst. 1969, 88, 316–329. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994; pp. 769–772. [Google Scholar]
- Larson, E.V.; Swann, D.A. Applying power system stabilizer part I: General concepts. IEEE Trans. Power Appl. Syst. 1981, 100, 3017–3024. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, X.; Wang, S.; Yao, W.; Waqar, A.; Zuo, W.; Tang, Y. Mechanism Analysis and Experimental Validation of Employing Superconducting Magnetic Energy Storage to Enhance Power System Stability. Energies 2015, 8, 656-681. https://doi.org/10.3390/en8010656
Shi X, Wang S, Yao W, Waqar A, Zuo W, Tang Y. Mechanism Analysis and Experimental Validation of Employing Superconducting Magnetic Energy Storage to Enhance Power System Stability. Energies. 2015; 8(1):656-681. https://doi.org/10.3390/en8010656
Chicago/Turabian StyleShi, Xiaohan, Shaorong Wang, Wei Yao, Asad Waqar, Wenping Zuo, and Yuejin Tang. 2015. "Mechanism Analysis and Experimental Validation of Employing Superconducting Magnetic Energy Storage to Enhance Power System Stability" Energies 8, no. 1: 656-681. https://doi.org/10.3390/en8010656
APA StyleShi, X., Wang, S., Yao, W., Waqar, A., Zuo, W., & Tang, Y. (2015). Mechanism Analysis and Experimental Validation of Employing Superconducting Magnetic Energy Storage to Enhance Power System Stability. Energies, 8(1), 656-681. https://doi.org/10.3390/en8010656