
Impact of the Converter Control Strategies on the Drive Train of Wind Turbine during Voltage Dips

Abstract
:
1. Introduction
2. Modeling of Drive Train and Electrical Subsystems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Rated wind speed | 11 m/s | Rated power | 1.5 MW |
| Rated rotor speed | 1.82 rad/s | Rated voltage (line to line) | 690 V |
| Gearbox ratio | 103.6 | Frequency | 50 Hz |
| Rotor diameter | 70 m | Generator inertia about HSS | 90 kg·m2 |
| Tower height | 82.38 m | Hub inertia about rotor axis | 34.6 × 103 kg·m2 |
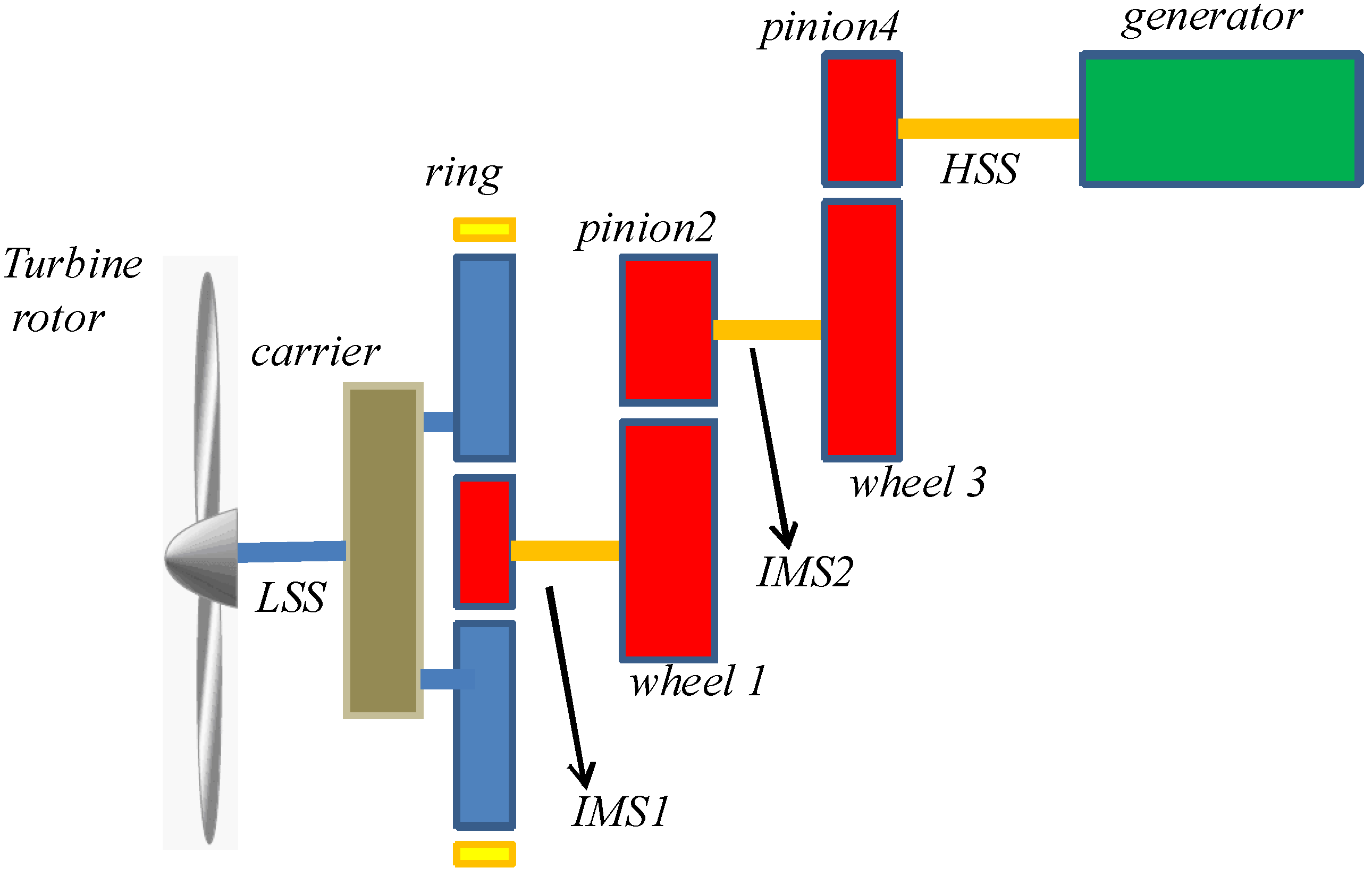
2.1. Drive Train Model


| Mode | Frequency (Hz) | Mode | Frequency (Hz) |
|---|---|---|---|
| 1 | 0 | 6 | 950 |
| 2 | 2.6 | 7 | 2523.3 |
| 3 | 175 | 8 | 3370 |
| 4 | 328 | 9 | 6782.3 |
| 5 | 920 | - | - |
2.2. Electrical Model
2.2.1. Generator
2.2.2. Converter

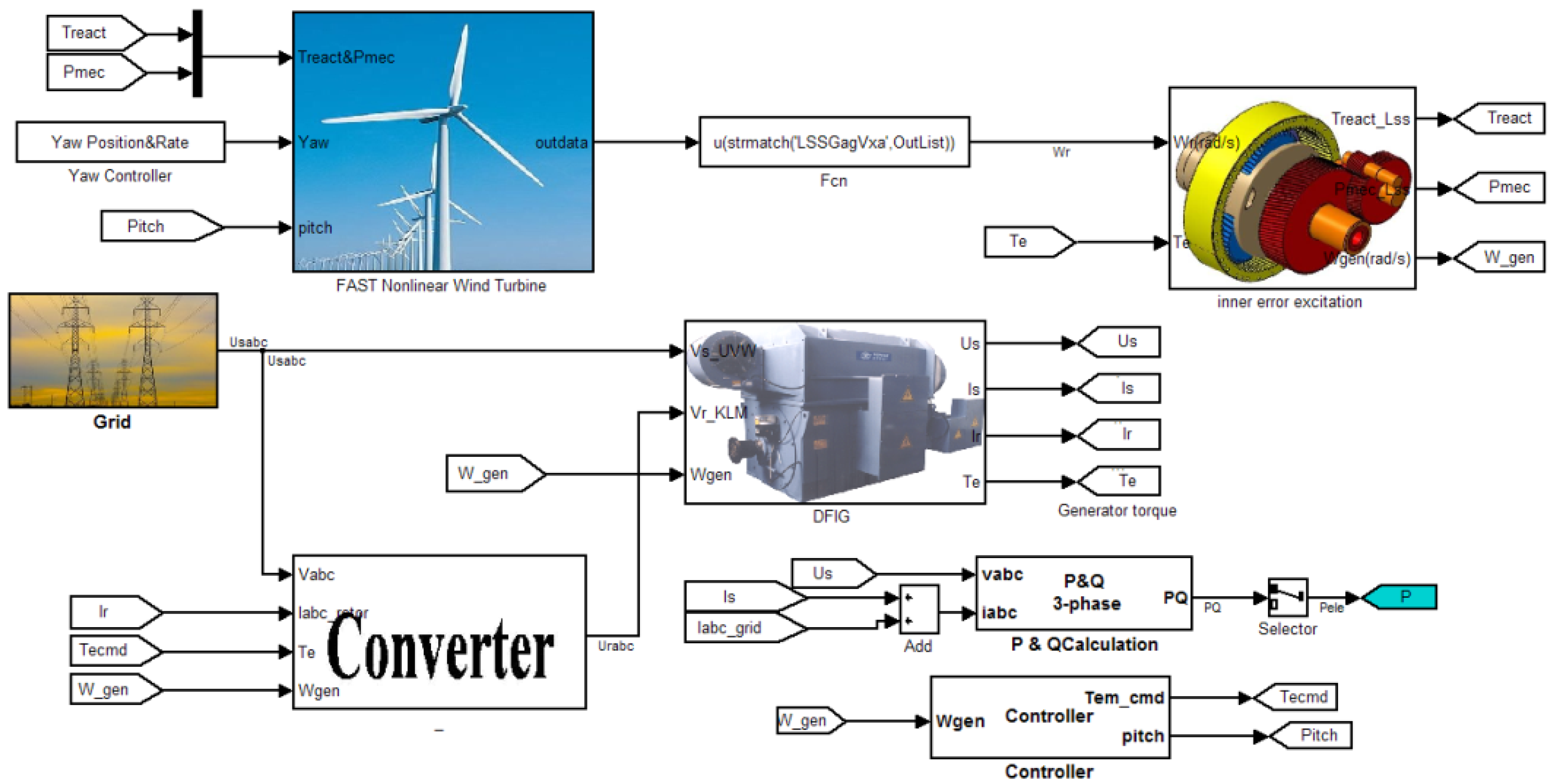
2.3. Model Integration

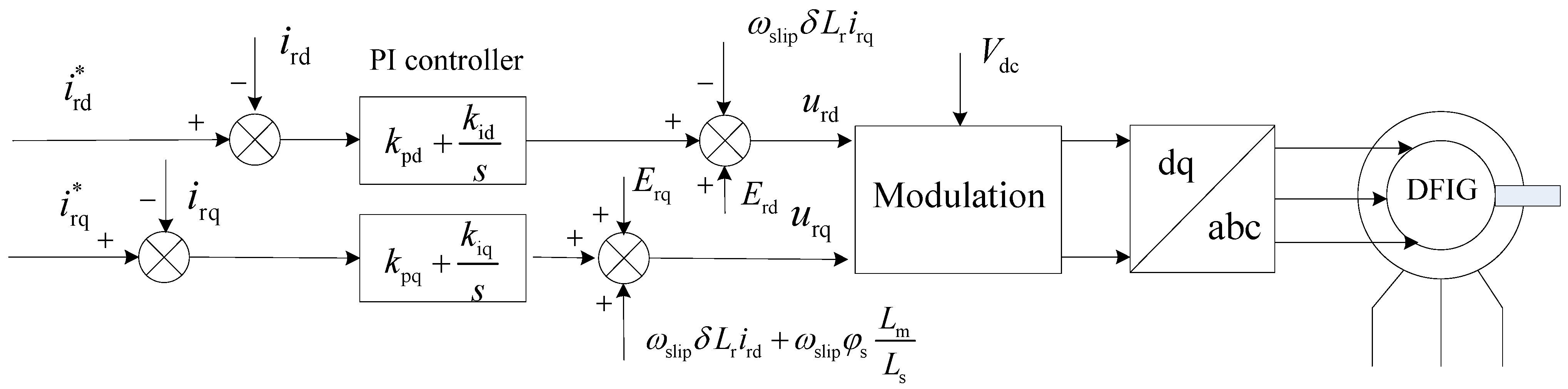
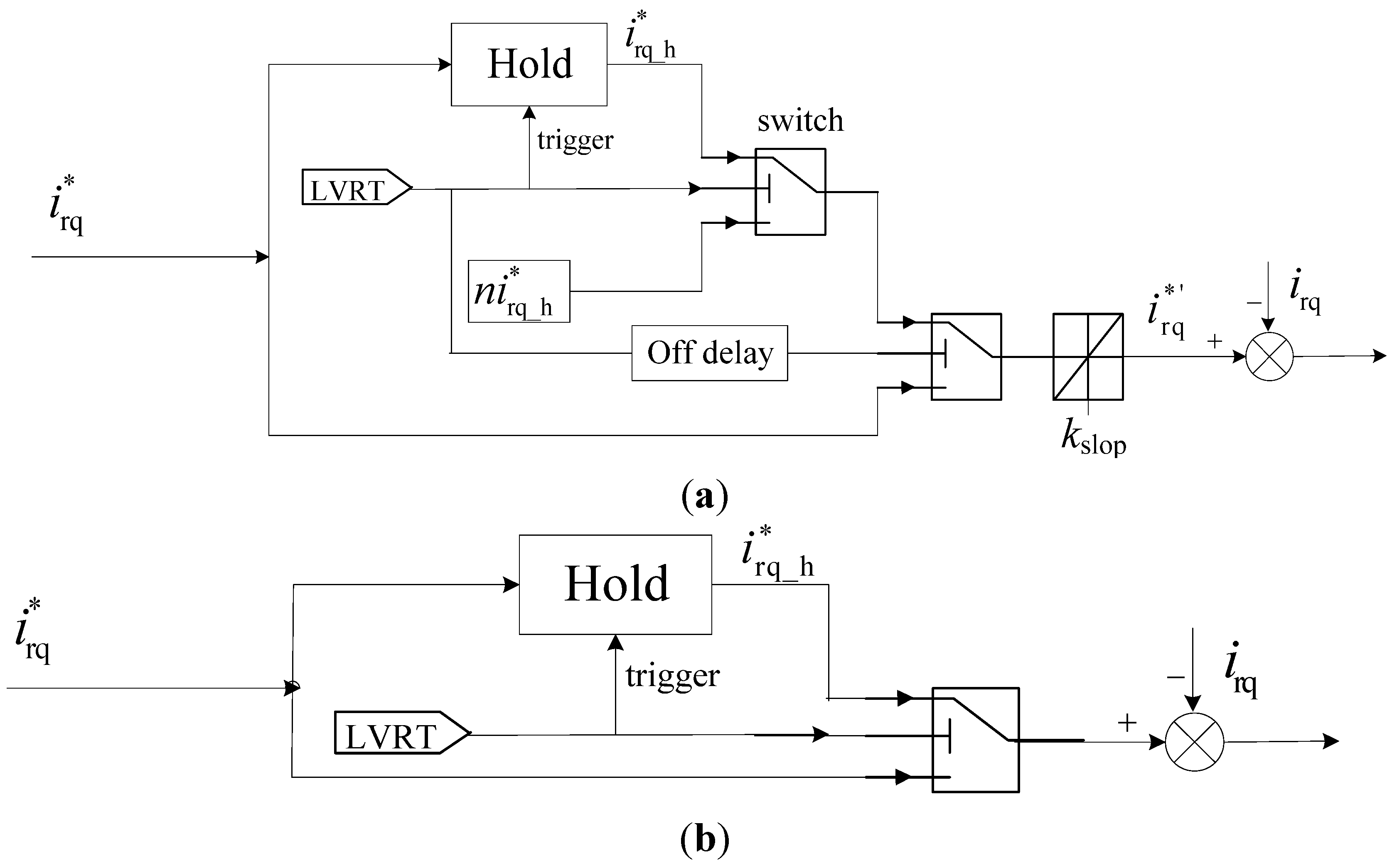
3. Rotor Side Converter (RSC) Control during Voltage Dip

3.1. Deeper Voltage Dip


3.2. Lower Voltage Dip
4. Study Cases and Simulation Results
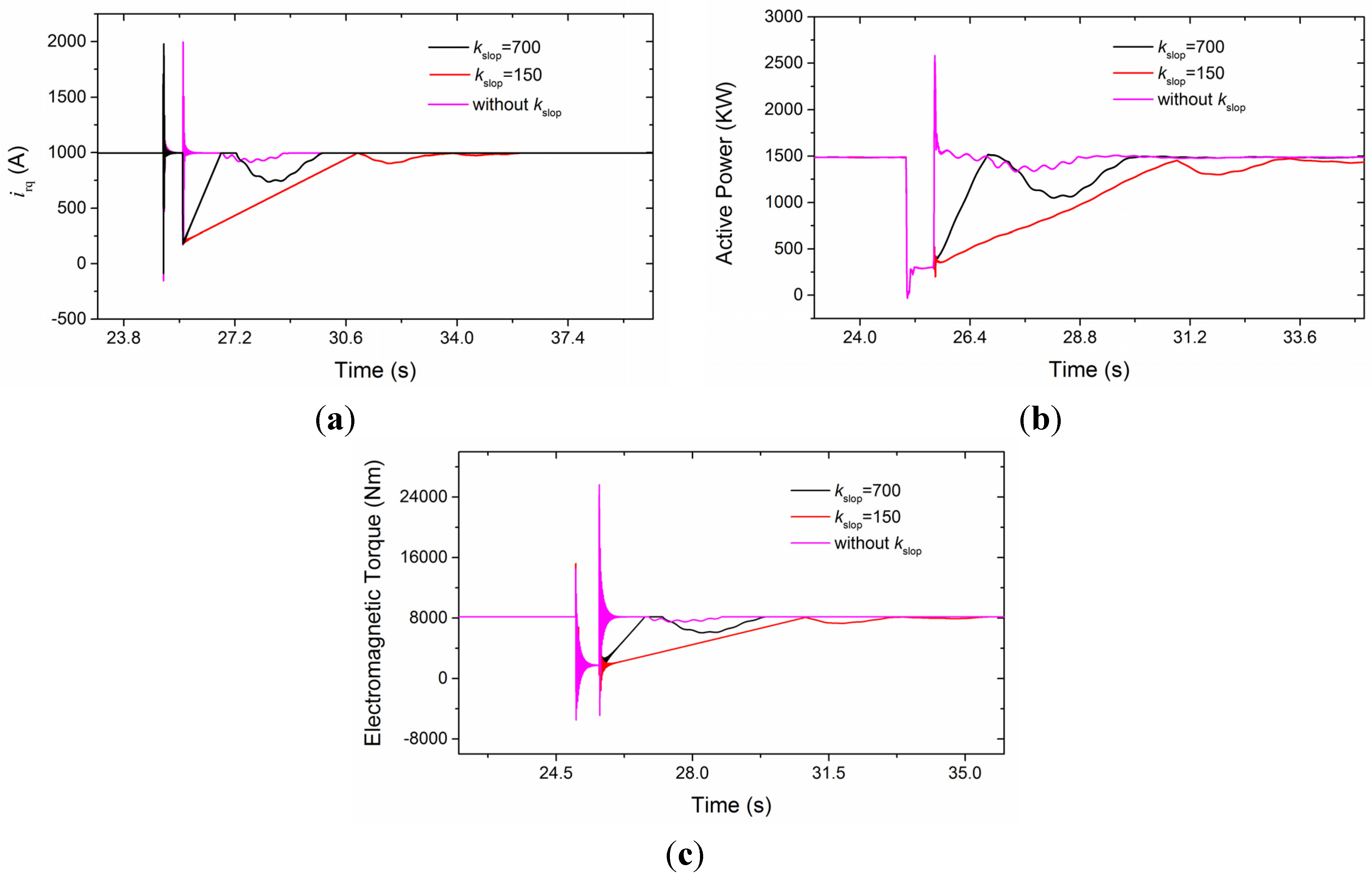
4.1. Rising Speed Effect of Power Recovery


4.2. Effect of Different Converter Control during Small Voltage Dip

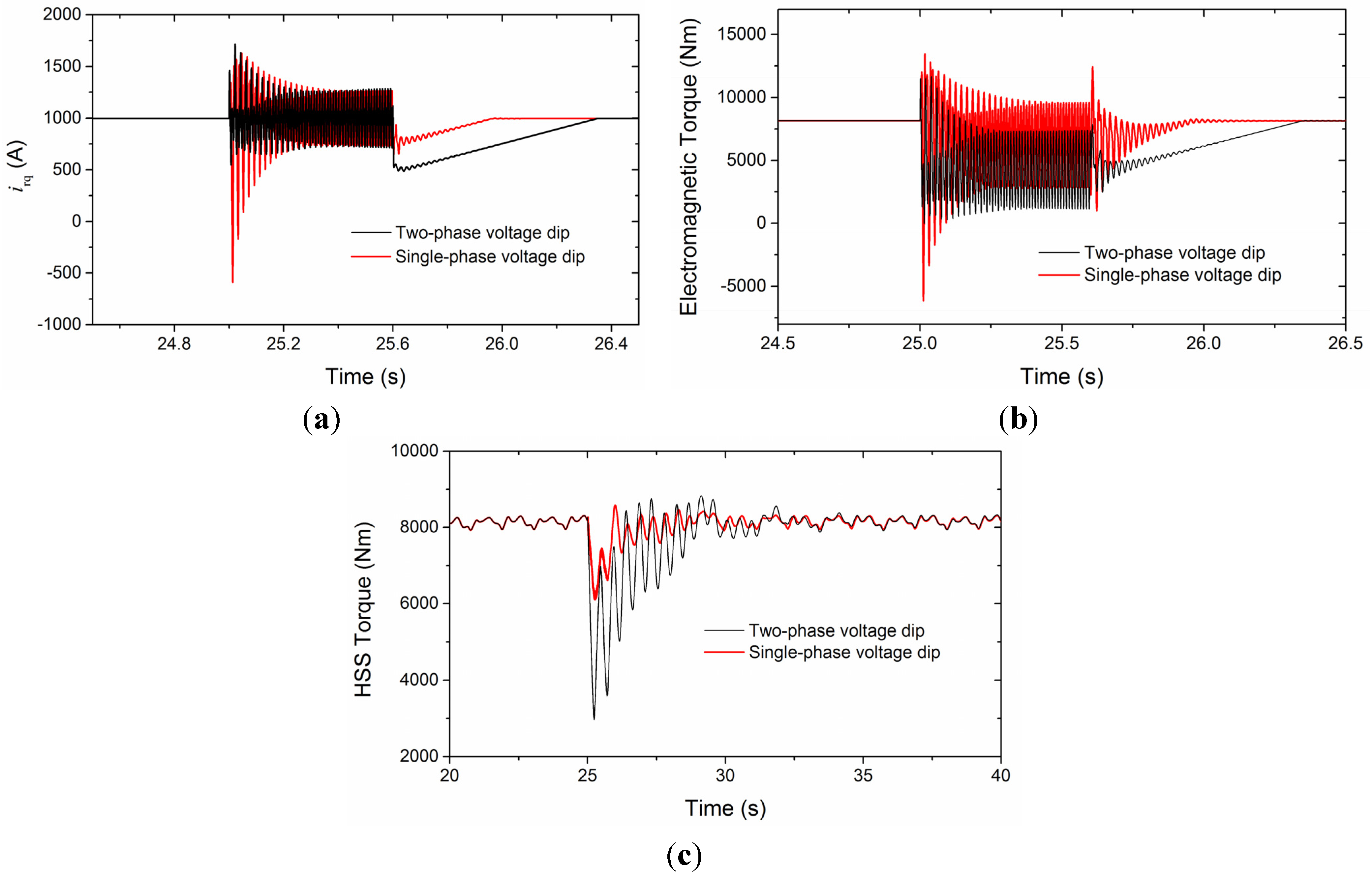
4.3. Effect of Unbalanced Voltage Dip



| Amplitude of torque oscillation (Nm) | With torque sag | Without torque sag |
|---|---|---|
| 120 | 2 | 2 |
| 200 | 1 | 1 |
| 280 | 30 | 0 |
| 410 | 1 | 1 |
| 550 | 1 | 15 |
| 590 | 1 | 35 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix
| Generator Parameters | Value |
| Rs, Rr (mΩ) | 7.747, 6.881 |
| Ls, Lr (mH) | 0.226, 0.278 |
| Lm (mH) | 8.463 |
| Pole pairs | 2 |
| Converter Control Parameters | Value |
| RSC kpd, kid | 0.1, 10 |
| RSC kpq, kiq | 8, 100 |
| GSC kpd, kid | 1, 10 |
| GSC kpq, kiq | 1, 10 |
| Pitch control parameters | Value |
| kp-pitch, ki-pitch | 1, 0.3 |
| Time delay due to pitch actuator (s) | 0.2 |
| Maximum rate of pitch actuation (deg/s) | 10 |
References
- Chen, W.J.; Blaabjerg, F.; Zhu, N.; Chen, M.; Xu, D. Doubly fed induction generator based wind turbine systems subject to recurring grid faults. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition-APEC 2014, Fort Worth, TX, USA, 16–20 March 2014.
- Blaabjerg, F.; Liserre, M.; Ma, K. Power electronics converters for wind turbine systems. IEEE Trans. Ind. Appl. 2012, 48, 708–719. [Google Scholar] [CrossRef]
- Trilla, L.; Gomis-Bellmunt, O.; Junyent-Ferre, A.; Mata, M.; Sanchez Navarro, J.; Sudria-Andreu, A. Modeling and validation of DFIG 3-MW wind turbine using field test data of balanced and unbalanced voltage sags. IEEE Trans. Sustain. Energy 2011, 2, 509–519. [Google Scholar] [CrossRef]
- Kiani, M.; Lee, W.J. Effects of voltage unbalance and system harmonics on the performance of doubly fed induction wind generators. IEEE Trans. Ind. Appl. 2010, 46, 562–568. [Google Scholar] [CrossRef]
- Xu, L.; Wang, Y. Dynamic modeling and control of DFIG-based wind turbines under unbalanced network conditions. IEEE Trans. Power Syst. 2007, 22, 314–323. [Google Scholar] [CrossRef]
- Papathanassiou, S.A.; Papadopoulos, M.P. Mechanical stresses in fixed-speed wind turbines due to network disturbances. IEEE Trans. Energy Convers. 2001, 16, 361–367. [Google Scholar] [CrossRef]
- Buendia, F.J.; Vigueras-Rodriguez, A.; Gomez-Lazaro, E.; Fuentes, J.A.; Molina-Garcia, A. Validation of a mechanical model for fault ride-through: Application to a Gamesa G52 commercial wind turbine. IEEE Trans. Energy Convers. 2013, 28, 707–715. [Google Scholar] [CrossRef]
- Girsang, I.P.; Dhupia, J.S.; Muljadi, E.; Singh, M.; Pao, L.Y. Gearbox and drivetrain models to study dynamic effects of modern wind turbines. IEEE Trans. Ind. Appl. 2014, 50, 874–881. [Google Scholar] [CrossRef]
- The MathWorks, Inc. Simscape User’s Guide. Available online: http://www.mathworks.cn/help/pdf_doc/physmod/simscape/simscape_ug.pdf (accessed on 10 July 2015).
- Fadaeinedjad, R.; Moallem, M.; Moschopoulos, G. Simulation of a wind turbine with doubly fed induction generator by FAST and Simulink. IEEE Trans. Energy Convers. 2008, 23, 690–700. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Buhl, M.L., Jr. FAST User’s Guide. Available online: https://nwtc.nrel.gov/system/files/FAST.pdf (accessed on 10 July 2015).
- Miao, F.L.; Shi, H.S.; Zhang, X.Q. Modelling of wind turbines coupled in multi-domain and dynamic response analysis. Proc. Chin. Soc. Electr. Eng. 2015, 35, 1704–1712. (In Chinese) [Google Scholar]
- Pedersen, R. Dynamic Modeling of Wind Turbine Gearboxes and Experimental Validation. Ph.D. Thesis, Technical University of Denmark, Copenhagan, Denmark, 2010. [Google Scholar]
- Peeters, J. Simualtion of Dynamic Drive Train Loads in a Wind Turbine. Ph.D. Thesis, Katholieke University Leuven, Leuven, Belgium, 2006. [Google Scholar]
- Lei, T.; Barnes, M.; Ozakturk, M. Doubly-fed induction generator wind turbine modelling for detailed electromagnetic system studies. IET Renew. Power Gener. 2013, 7, 180–189. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, Q.W.; Xu, H.H.; Guo, Q.L.; Sun, H.B. Fast coordinated control of DFIG wind turbine generators for low and high voltage ride-through. Energies 2014, 7, 4140–4156. [Google Scholar] [CrossRef] [Green Version]
- You, R.; Barahona, B.; Chai, J.Y.; Cutululis, N.A. A novel wind turbine concept based on an electromagnetic coupler and the study of its fault ride-through capability. Energies 2013, 6, 6120–6136. [Google Scholar] [CrossRef]
- Morren, J.; de Haan, S.W.H. Ride through of wind turbines with doubly-fed induction generator during a voltage dip. IEEE Trans. Energy Convers. 2005, 20, 435–441. [Google Scholar] [CrossRef]
- Mendes, V.F.; de Sousa, C.V.; Silva, S.R.; Rabelo, B.; Krauss, S.; Hofmann, W. Behavior of doubly-fed induction generator during symmetrical voltage dips-experimental results. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics (ISIE), Bari, Italy, 4–7 July 2010.
- Erlich, I.; Wrede, H.; Feltes, C. Dynamic behavior of DFIG-Based wind turbines during grid faults. In Proceedings of the Power Conversion Conference (2007 PCC’07), Nagoya, Japan, 2–5 April 2007.
- He, Y.K.; Hu, J.B. Several hot-spot issues associated with the grid-connected operations of wind turbine driven doubly fed induction generators. Proc. Chin. Soc. Electr. Eng. 2012, 32, 1–15. (In Chinese) [Google Scholar]
- Hu, J.B.; He, Y.K. DFIG wind generation systems operating with limited converter rating considered under unbalanced network conditions—Analysis and control design. Renew. Energy 2011, 36, 829–847. [Google Scholar] [CrossRef]
- Zhang, Z.L.; Nielsen, S.R.K.; Blaabjerg, F.; Zhou, D. Dynamics and control of lateral tower vibrations in offshore wind turbine by means of active generator torque. Energies 2014, 7, 7746–7772. [Google Scholar] [CrossRef]
- Dixit, A.; Suryanarayanan, S. Towards pitch-scheduled drive train damping in variable-speed, horizontal-axis large wind turbines. In Proceedings of the 44th IEEE Conference on Decision and Control and the European Control Conference, Seville, Spain, 12–15 December 2005.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miao, F.; Shi, H.; Zhang, X. Impact of the Converter Control Strategies on the Drive Train of Wind Turbine during Voltage Dips. Energies 2015, 8, 11452-11469. https://doi.org/10.3390/en81011452
Miao F, Shi H, Zhang X. Impact of the Converter Control Strategies on the Drive Train of Wind Turbine during Voltage Dips. Energies. 2015; 8(10):11452-11469. https://doi.org/10.3390/en81011452
Chicago/Turabian StyleMiao, Fenglin, Hongsheng Shi, and Xiaoqing Zhang. 2015. "Impact of the Converter Control Strategies on the Drive Train of Wind Turbine during Voltage Dips" Energies 8, no. 10: 11452-11469. https://doi.org/10.3390/en81011452
APA StyleMiao, F., Shi, H., & Zhang, X. (2015). Impact of the Converter Control Strategies on the Drive Train of Wind Turbine during Voltage Dips. Energies, 8(10), 11452-11469. https://doi.org/10.3390/en81011452