2.2. Brief Overview of the Method
Generally, the dynamics of a structure can be described by an infinite number of degrees of freedom; however, in engineering practice, structure motions are usually represented by a finite number of variables, usually translations or rotations, kept as low as possible to make analysis simpler. In the case of offshore structures, one can often treat the structure as a single rigid body resulting in only six degrees of freedom corresponding to the rigid translations and rotations of the structure.
If the equation of motion of the structure is linear, its response in terms of motion
y(
t) can always be seen as a linear combination of the modal contributions:
where
Φ is the mode shape matrix and
q(
t) the set of modal coordinates. Straightforwardly, the covariance matrix
Cyy(τ) of the response
y is related to the covariance matrix
Cqq(τ) of the modal coordinates
q as shown in Equation (2). By taking Fourier Transform of both sides of Equation (2), we obtain the relation between the two power spectral matrices
Syy(ω) and
Sqq(ω), shown in Equation (3).
Under the assumption of uncorrelated modes [
16], it must be noted that, for any fixed frequency, Equation (3) is formally equivalent to a Singular Value Decomposition (SVD) of the spectral density matrix
Syy, being
Sqq a diagonal matrix. In detail, each column of the mode shape matrix
Φ represents a singular vector and each corresponding term in the main diagonal of
Sqq is the corresponding singular value. The order of the singular vectors at each frequency ω depends on that of singular values, which are conventionally sorted in descending order.
The practical application of the FDD method descends directly from the few considerations above. In fact, given a certain number of measurement channels on the structure, equal to or larger than the number of modes used to represent the structure motions, one can easily calculate the power spectral matrix Syy(ω). Then, for each frequency ω, the matrix Φ(ω) and the diagonal matrix Sqq(ω) can be obtained through SVD.
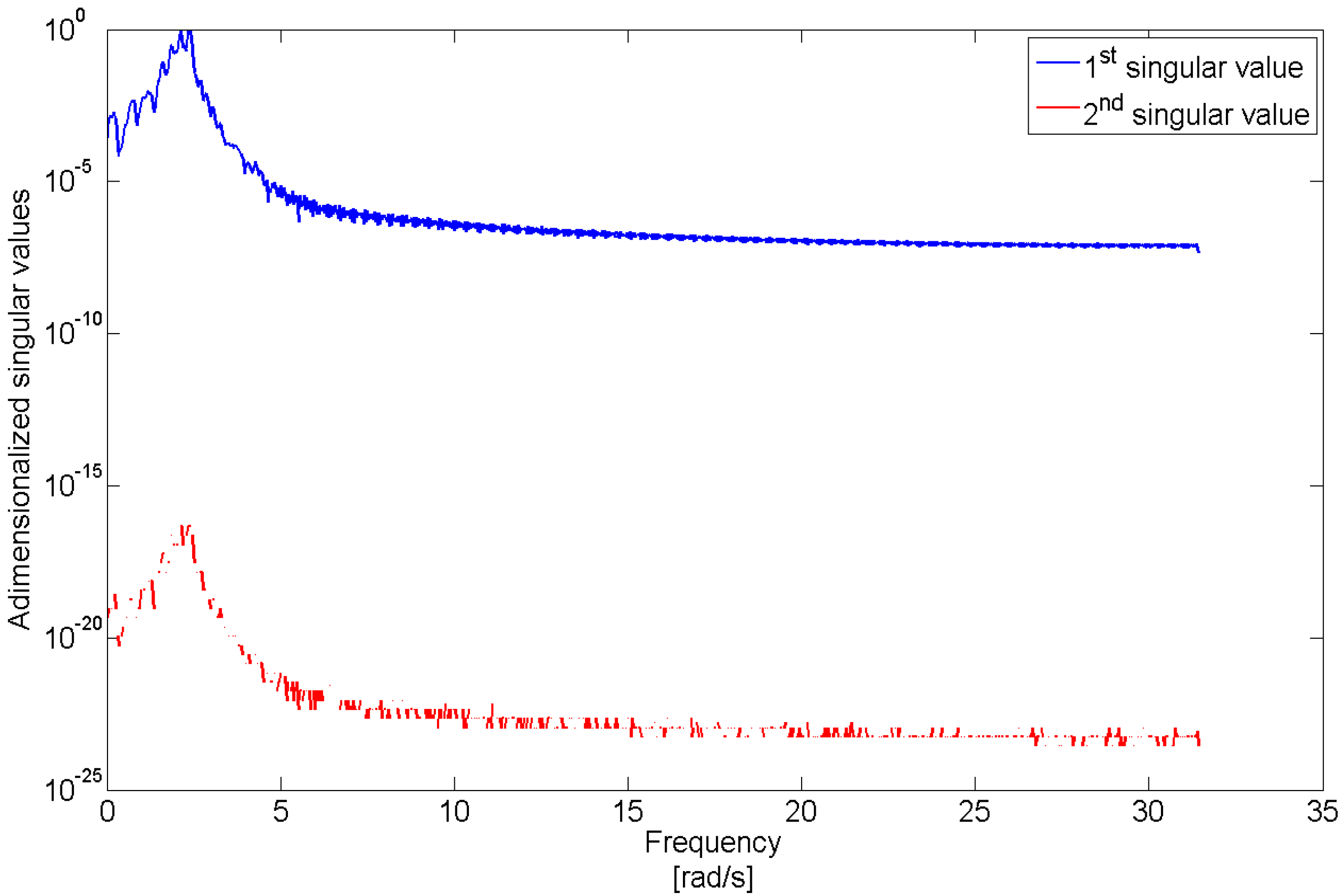
For instance, considering an ideal 2-Degrees Of Freedom (DOF) system, a typical plot of the two singular values in the frequency domain will be like that of
Figure 1.
At the natural frequency ω
n,i of the i-th mode, the spectral density matrix
Syy(ω
n,i) will be dominated by that mode. As a consequence, due to Equation (3) and to the fact that singular values of SVD are sorted in descending order, the first term of the diagonal matrix
Sqq(ω
n,i) will represent the modal spectral density ordinate of the mode at its natural frequency, and the first column of the matrix
Φ(ω
n,i) will represent the mode shape vector. The two peaks of the first singular value plot in
Figure 1 occur each at the natural frequency of a mode and represent the corresponding modal spectral density ordinates at that frequency.
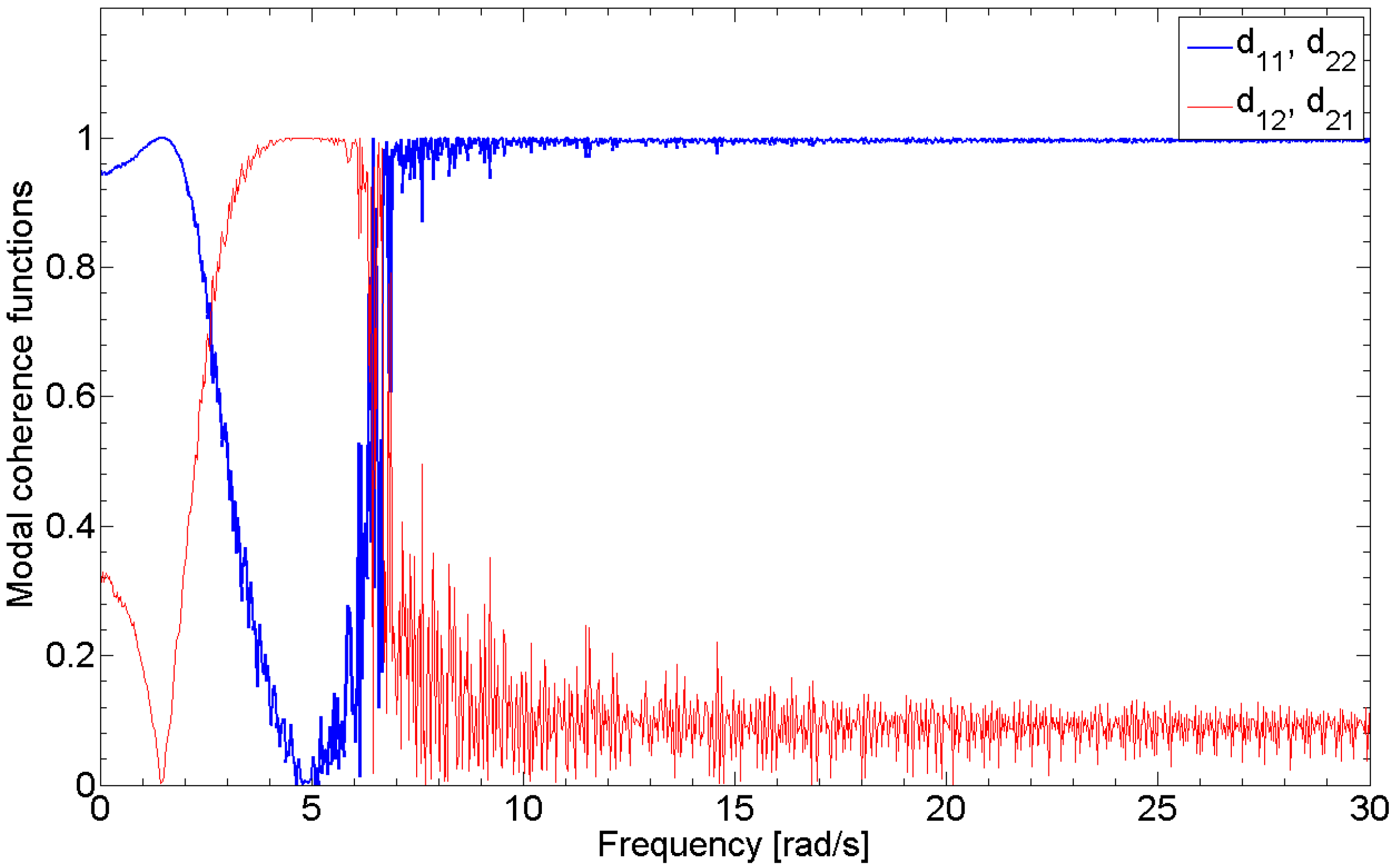
In order to estimate over the whole frequency domain the two modal spectral density functions, which will be used for the estimation of the modal damping, mode shape can be used to define a discrimination function, referred to as modal coherence. Practically speaking, the modal coherence of the mode
j with respect to the mode
k is a function of frequency defined as:
The modal coherence functions of the two singular vectors of the ideal case represented in
Figure 1, with respect to the two mode shapes of the system, are shown in
Figure 2.
The modal coherence function allows us to define a similarity criterion between the mode shape vector and the singular vectors estimated at all the frequencies. In fact, the value of the modal coherence tends to unity as the singular vector estimation tends to the mode shape. As a consequence, we can arbitrarily define a threshold sufficiently close to unity and assume that the singular vector calculated at each frequency actually corresponds to a mode shape if the corresponding modal coherence exceeds this threshold:
Straightforwardly, we can build the modal power spectral density function for each estimated mode, as:
It should be noted that Equation (6) is referred to the whole frequency domain, hence the modal power spectral density function can be estimated for a wide frequency range, including frequencies far from the modal natural frequency. However, there may be some small regions in the frequency domain where the modal coherence of all the modes is less than the threshold
t2 (see e.g., the frequencies around 2.5 rad/s in
Figure 2). These regions correspond to the frequency values where the singular vectors switch from a structural mode to another. According to Equation (6), it is theoretically not possible to estimate modal spectral density in these regions. However, provided that the choice of the threshold
t2 is appropriate, these regions are very narrow and sufficiently far from the modal natural frequency, resulting in relatively small spectral density ordinates. As a consequence, the damping estimation is not significantly affected by the presence of these regions and so the modal spectral density can be accepted as it is or, equivalently, corrected—e.g., by linear interpolation.
Many engineering applications fall in a case similar to that of
Figure 1—i.e., each mode dominates structure dynamics at its natural frequency. Alternatively, there may be cases—e.g., dealing with certain offshore structures—in which some additional issues are to be tackled since there are modes which do not dominate the structure dynamics at their natural frequency. A very common case in offshore engineering is given by structures whose different modes have approximately the same natural frequency, due to the symmetrical nature of the structures. In this case, depending on the excitation forces and on the system damping, near the natural frequency of these modes, one of them will be dominating over the others. As a consequence, the first entry of the matrix
Sqq at the natural frequency of these modes will represent the modal spectral ordinate of the dominating mode and the first column of the matrix
Φ will represent its mode shape, while the information related to the non-dominating mode will be shifted to the subsequent positions in the matrices. This case is schematically represented in
Figure 3, always dealing with an ideal 2-DOF system.
A similar situation may occur also when a mode is dominating the structure dynamics over a wide frequency range, to the extent that it overwhelms other modes at their natural frequencies, even if they are relatively far from the natural frequency of the dominating mode. From a physical point of view, this situation may occur when one mode contribution to the overall structure response is very low, either because of the characteristics of the structure or of the external load. However, this may also happen for numerical reasons when the variables in Syy have different measurement units. That is the case, for example, of structures whose degrees of freedom are translational and rotational, as it is typical in offshore practice where the structures are regarded as rigid bodies. In such cases the choice of measurement units—e.g., degrees or radians—dramatically affects the numerical importance of one mode among the others, so that one class of motions may numerically overwhelm the other, occupying the first entries of the matrices. Theoretically speaking, the final result of the method is not affected by that choice since only the positions of the different contributions in the SVD matrices vary, while identified mode shapes, natural frequencies, and modal spectral density functions should remain the same. However, in practice, attention should be paid to avoid overwhelmed modes, since results are less accurate in the last entries of the matrix.
To summarize the above discussion, FDD method is based on the correct interpretation of the coupled information coming from the singular value plot and the modal coherence function for each singular vector. It is important to remark that, in the most general case, the “horizontal reading” of the first singular value in the singular value plot may not be sufficient to identify all the peaks related to each mode and that a “vertical reading” may be also needed, not only to identify the possibly missing peaks in the first singular value—as it happens e.g., in
Figure 2—but also to reconstruct the modal spectral density function of each mode in the entire frequency domain, including frequencies far from its natural one.
Once the modal spectral density function is estimated for each mode, damping ratio can be estimated too using classical methods such as the half power bandwidth method, which acts directly on the modal power spectral density in the frequency domain, or the logarithmic decrement, which acts on the modal auto-correlation—i.e., the Inverse Fourier Transform of the modal power spectral density—in the time domain. The latter is usually more accurate, hence it has been chosen for the present study.





 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}