
Robust Unit Commitment Including Frequency Stability Constraints


 and
and
Abstract
:1. Introduction
- VGTs usually maximize their power production, i.e., no operating reserves are sustained for frequency control.
- VGTs have changing availability levels over time (variability), which cannot be predicted with perfect accuracy (uncertainty). As the level of VGTs increases, the additional variability and uncertainty introduced in the system will cause an increase in the operating reserves requirements, thus imposing additional regulation burdens on the remaining SGs.
- Unlike conventional SGs, converted-based VGTs have no inertial response unless additional control actions are taken.
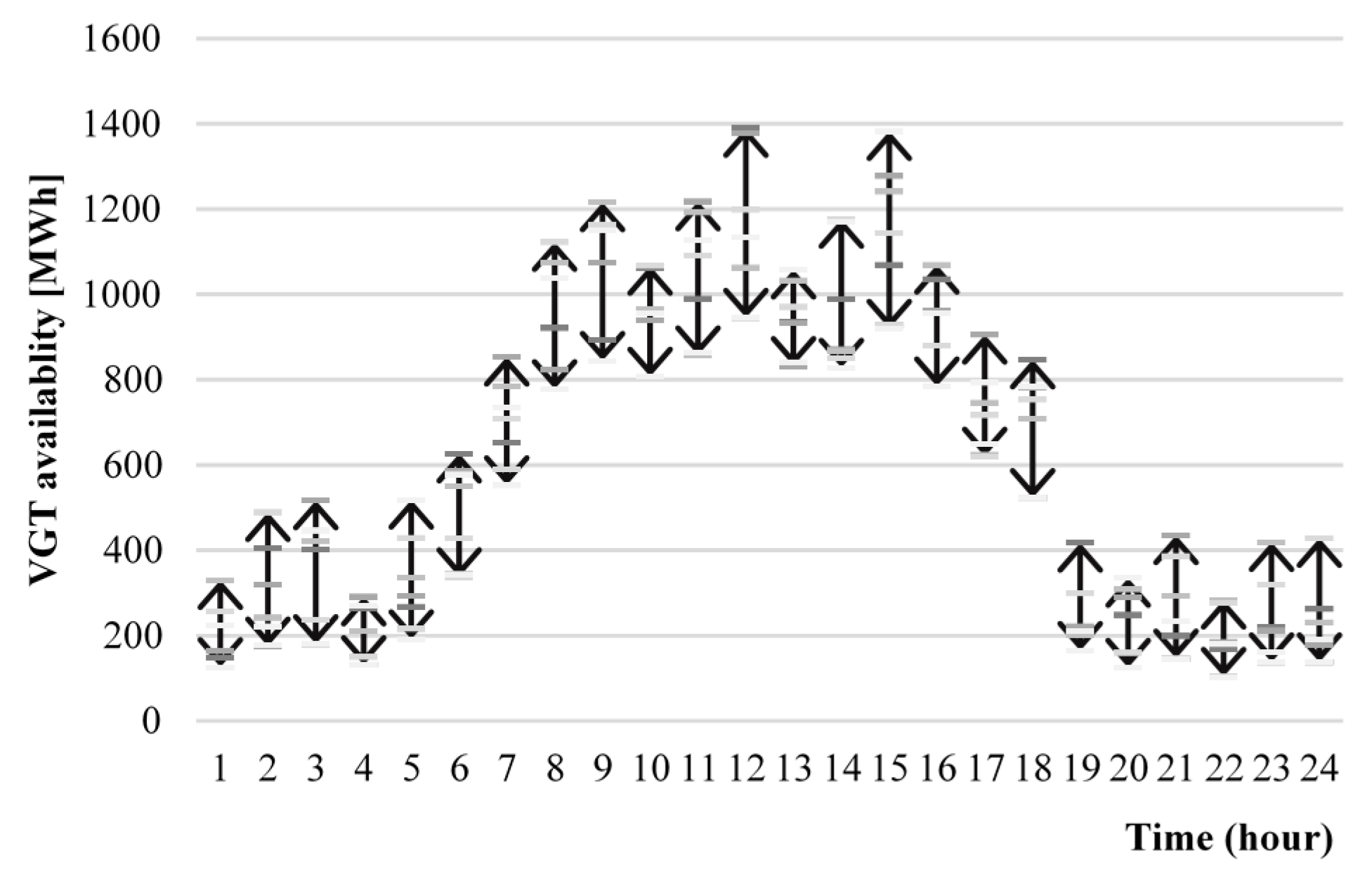
2. Forecasting and Scenario Generation
2.1. VGTs Power Forecast via Bootstrapping
2.2. Scenario Generation
3. Robust UC Formulation
3.1. Hedging against VGT Power Fluctuations
3.2. MILP Formulation for the TSRUC
3.2.1. Parameters
3.2.2. First-Stage Variables
3.2.3. Second-Stage Variables
3.2.4. Reserves
3.2.5. Dispatch Problem
3.2.6. RUC
4. Frequency Stability Constraints
4.1. System Dynamic Right after a Contingency
4.2. Formulation of the Frequency Constraints
5. Case Study
5.1. Power System under Study
5.2. Day under Study and Scenarios for VGT in the UC
6. Obtained Results
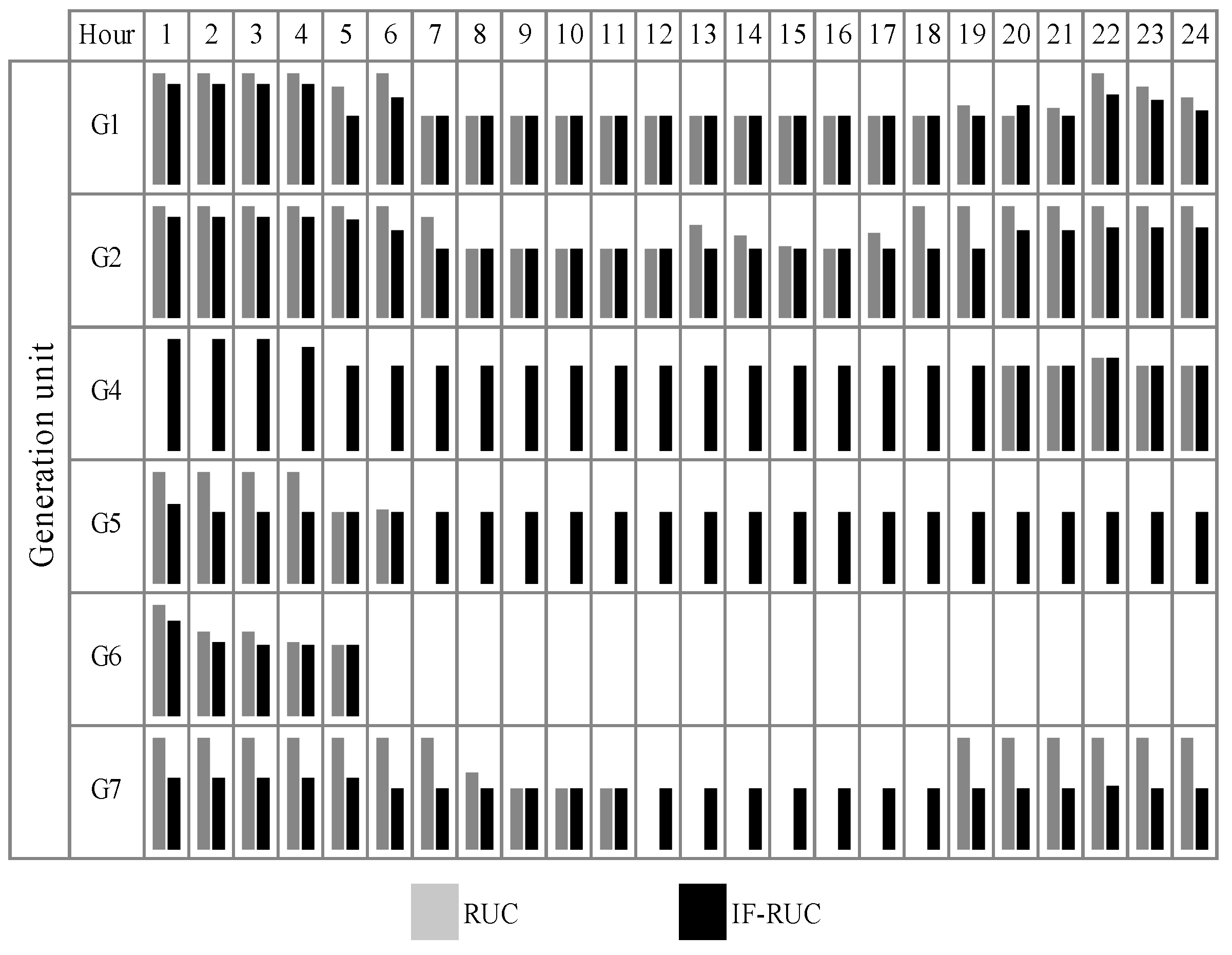
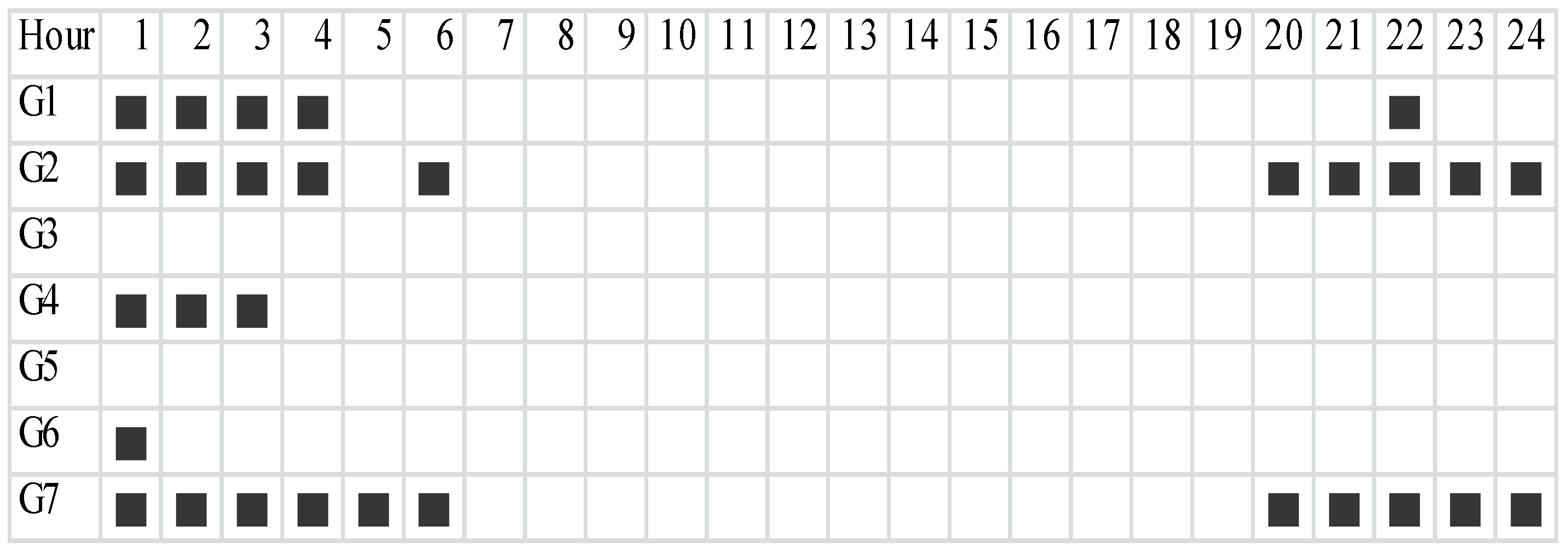
6.1. UC Simulations
- Conventional UC without VGT.
- FC-RUC considering the same scenarios for the VGT as in case (ii).
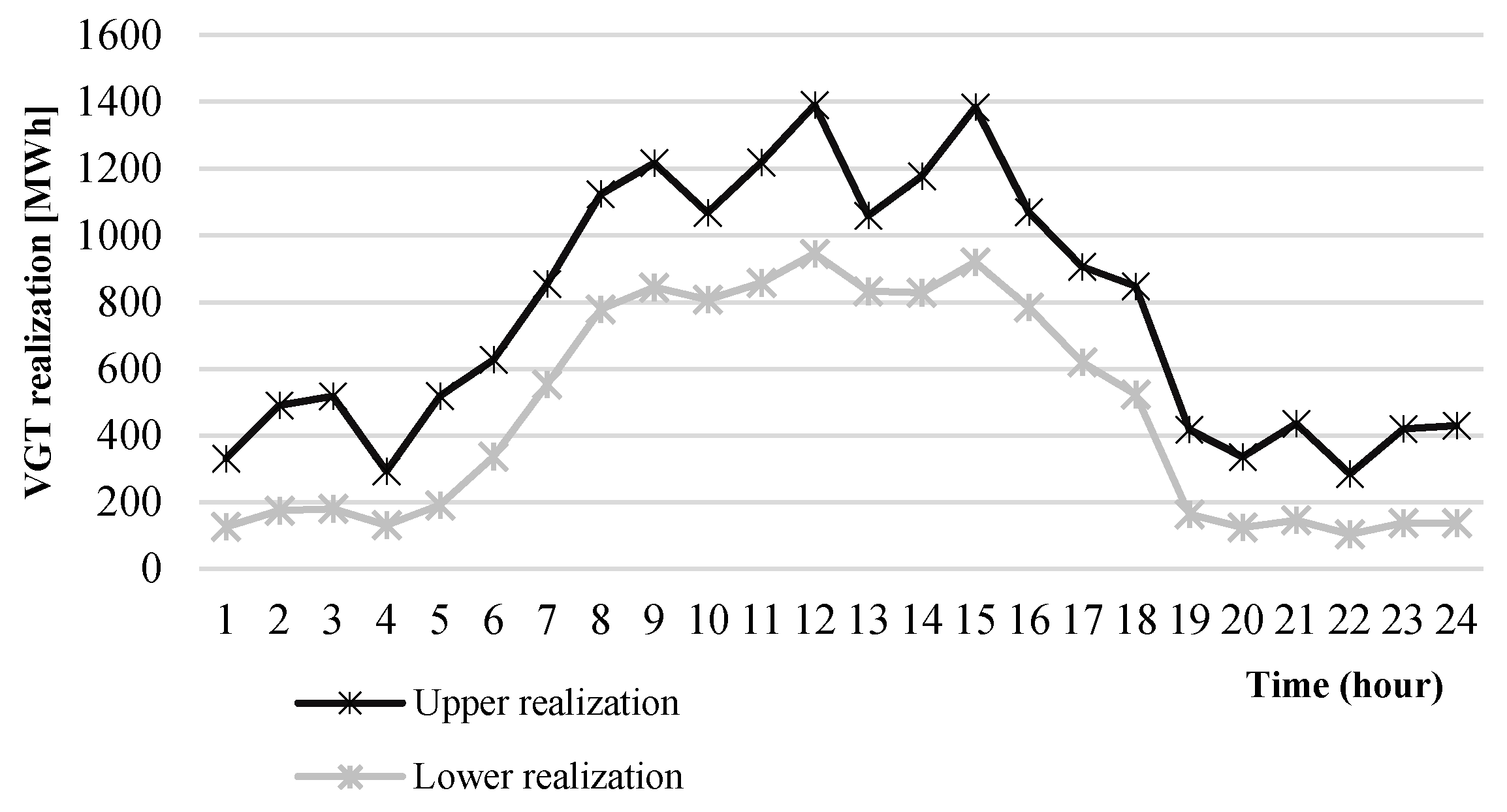
6.2. Real-Time Dispatch
6.3. Dynamic Simulations
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Li, M.; McCalley, J.D. Influence of renewable integration on frequency dynamics. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–7.
- Zhang, G.; McCalley, J.D. Optimal power flow with primary and secondary frequency constraint. In Proceedings of the North American Power Symposium (NAPS), Pullman, WA, USA, 7–9 September 2014; pp. 1–6.
- Nguyen, N.; Mitra, J. An analysis of the effects and dependency of wind power penetration on system frequency regulation. IEEE Trans. Sustain. Energy 2016, 7, 345–363. [Google Scholar] [CrossRef]
- Doherty, R.; Lalor, G.; O’Malley, M. Frequency control in competitive electricity market dispatch. IEEE Trans. Power Syst. 2005, 20, 1588–1596. [Google Scholar] [CrossRef]
- Chavez, H.; Baldick, R.; Sharma, S. Governor rate-constrained OPF for primary frequency control adequacy. Trans. Power Syst. 2014, 29, 1473–1480. [Google Scholar] [CrossRef]
- Lee, Y.; Baldick, R. A frequency-constrained stochastic economic dispatch model. IEEE Trans. Power Syst. 2013, 28, 2301–2312. [Google Scholar] [CrossRef]
- Ahmadi, H.; Ghasemi, H. Security-constrained unit commitment with linearized system frequency limit constraints. IEEE Trans. Power Syst. 2014, 29, 1536–1545. [Google Scholar] [CrossRef]
- Restrepo, J.; Galiana, F. Unit commitment with primary frequency regulation constraints. In Proceedings of the IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006.
- Daly, P.; Flynn, D.; Cunniffe, N. Inertia considerations within unit commitment and economic dispatch for systems with high non-synchronous penetrations. In Proceedings of the IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015.
- Ela, E.; Gevorgian, V.; Tuohy, A.; Kirby, B.; Milligan, M.; O’Malley, M. Market Designs for the Primary Frequency Response Ancillary Service—Part I: Motivation and Design. IEEE Trans. Power Syst. 2014, 29, 421–431. [Google Scholar] [CrossRef]
- Chang, G.W.; Chuang, C.S.; Lu, T.K.; Wu, C.C. Frequency-regulating reserve constrained unit commitment for an isolated power system. IEEE Trans. Power Syst. 2013, 28, 578–586. [Google Scholar] [CrossRef]
- Huang, Y.; Zheng, Q.; Wang, J. Two-stage stochastic unit commitment model including non-generation resources with conditional value-at-risk constraints. Electr. Power Syst. Res. 2014, 116, 427–438. [Google Scholar] [CrossRef]
- Kalantari, A.; Galiana, F. Generalized Sigma approach to unit commitment with uncertain wind power generation. Int. J. Electr. Power Energy Syst. 2015, 65, 367–374. [Google Scholar] [CrossRef]
- Jiang, R.; Wang, J.; Guan, Y. Robust unit commitment with wind power and pumped storage hydro. IEEE Trans. Power Syst. 2011, 27, 800–810. [Google Scholar] [CrossRef]
- Zhao, C.; Wang, J.; Watson, J.P.; Guan, Y. Multi-stage robust unit commitment considering wind and demand response uncertainties. IEEE Trans. Power Syst. 2013, 28, 2708–2717. [Google Scholar] [CrossRef]
- Xiong, P.; Jirutitijaroen, P. Two-stage adjustable robust optimization for unit commitment under uncertainty. IET Gener. Transm. Distrib. 2014, 8, 573–582. [Google Scholar]
- Álvarez-Miranda, E.; Campos-Valdés, C.; Rahmann, C. Two-stage robust UC including a novel scenario-based uncertainty model for wind power applications. Energy Convers. Manag. 2015, 101, 94–105. [Google Scholar] [CrossRef]
- Pascual, L.; Romo, J.; Ruiz, E. Bootstrap predictive inference for ARIMA processes. J. Time Ser. Anal. 2014, 25, 449–465. [Google Scholar] [CrossRef]
- Bertsimas, D.; Sim, M. Robust discrete optimization and network flows. Math. Program. Ser. B 2003, 98, 49–71. [Google Scholar] [CrossRef]
- Egido, I.; Fernandez-Bernal, F.; Centeno, P.; Rouco, L. Maximum frequency deviation calculation in small isolated power. IEEE Trans. Power Syst. 2009, 24, 1731–1738. [Google Scholar] [CrossRef]
- CDEC-SING. 2015. Available online: http://cdec2.cdec-sing.cl/ (accessed on 14 December 2015).
- DigSILENT GmbH PowerFactory, Version 15.0, DIgSILENT: Gomaringen, Germany, 2015.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generation Unit | Minimum Power (MW) | Maximum Power (MW) | Minimum Operation Time (h) | Inertia Constant (s) |
|---|---|---|---|---|
| G1 | 150 | 263 | 48 | 3.8 |
| G2 | 150 | 263 | 48 | 3.8 |
| G3 | 168 | 263 | 48 | 3.8 |
| G4 | 168 | 263 | 48 | 3.8 |
| G5 | 155 | 258 | 1 | 10.2 |
| G6 | 155 | 258 | 1 | 10.2 |
| G7 | 178 | 350 | 1 | 6.3 |
| Rest of SGs | - | 1697 | - | 9.6 |
| Case | Objective Function Value (USD) | Average Number of Conventional Units Operating at Each Hour | Average Inertia Constant at Each Hour (s) |
|---|---|---|---|
| (i.) | 2,238,250 | 20 | 15.5 |
| (ii.) | 1,800,310 | 17 | 13.5 |
| (iii.) | 2,027,340 | 21 | 17.7 |
| Formulation | Total Operation Costs (USD) | |
|---|---|---|
| Upper Realization | Lower Realization | |
| RUC | 1,509,000 | 1,776,660 |
| FC-RUC | 1,791,240 | 1,923,270 |
| Generation Unit | Injected Power in Hours of Spillage (MW) | Minimum Power (MW) |
|---|---|---|
| G1 | 150 | 150 |
| G2 | 150 | 150 |
| G4 | 168 | 168 |
| G5 | 155 | 155 |
| G7 | 178 | 178 |
| Case | Power Imbalance (MW) | System Constant Inertia (s) | Frequency Nadir (Hz) | ROCOF (Hz/s) | Load Shed (MW) |
|---|---|---|---|---|---|
| RUC | 150 | 5.65 | 48.83 | 0.26 | 27 |
| FC-RUC | 150 | 14.86 | 49.48 | 0.17 | 0 |
| Case | Power Imbalance (MW) | System Constant Inertia (s) | Frequency Nadir (Hz) | ROCOF (Hz/s) | Load Shed (MW) |
|---|---|---|---|---|---|
| RUC | 150 | 9.38 | 49.39 | 0.26 | 0 |
| FC-RUC | 150 | 12.52 | 49.48 | 0.18 | 0 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez-Illanes, F.; Álvarez-Miranda, E.; Rahmann, C.; Campos-Valdés, C. Robust Unit Commitment Including Frequency Stability Constraints. Energies 2016, 9, 957. https://doi.org/10.3390/en9110957
Pérez-Illanes F, Álvarez-Miranda E, Rahmann C, Campos-Valdés C. Robust Unit Commitment Including Frequency Stability Constraints. Energies. 2016; 9(11):957. https://doi.org/10.3390/en9110957
Chicago/Turabian StylePérez-Illanes, Felipe, Eduardo Álvarez-Miranda, Claudia Rahmann, and Camilo Campos-Valdés. 2016. "Robust Unit Commitment Including Frequency Stability Constraints" Energies 9, no. 11: 957. https://doi.org/10.3390/en9110957
APA StylePérez-Illanes, F., Álvarez-Miranda, E., Rahmann, C., & Campos-Valdés, C. (2016). Robust Unit Commitment Including Frequency Stability Constraints. Energies, 9(11), 957. https://doi.org/10.3390/en9110957