1. Introduction
A brushless doubly fed machine (BDFM) is a new type of AC variable speed motor that has the characteristics of both asynchronous and synchronous motors. BDFM has good application prospects in AC driving systems, wind power generation because it offers high reliability and low-maintenance requirements by removing the brush gear and slip ring [
1,
2,
3,
4,
5,
6,
7,
8,
9]. Furthermore, BDFM shows commercial potential because of its low converter capacity requirement. However, the BDFM is a high-order, multivariable, and strong coupling nonlinear system. Compared with asynchronous and synchronous motors, BDFM has a complicated structure and a complicated running mechanism, thus the establishment of a mathematical model, the analysis of stability, and the design of a control strategy are difficult.
BDFM, which originates from a self-cascaded induction machine, has one special rotor and two sets of stator windings with different pole pairs. Among them, the motor, which stator winding is connected directly to the power grids, is called power motor (PM), the other motor, which stator winding is connected to a frequency converter, is called control motor (CM) [
2].
Many scholars have proposed various mathematical models for BDFMs to analyze their performance and study its control methods [
10,
11,
12,
13,
14,
15]. Roberts et al. developed a network model of BDFM in a three phase static coordinate [
10]. Wallace et al. proposed a model of cascade wound rotor doubly fed motor in a rotor reference frame. In these models, all the variables of the PM and CM are AC under the static state [
11]. In order to obtain a model which all variables of the PM and CM are DC under the static state, the so-called double synchronous frame BDFM model was presented [
12,
13]. In this double synchronous model, the BDFM was decomposed into two subsystems, a power winding subsystem and a control winding subsystem, the electromagnetic torque depends on the current and the flux of both subsystems, so the control system is complex, and the controls of flux and torque are not decoupled. For a cage rotor BDFM, the so-called unified reference frame BDFM model was proposed [
14,
15]. This model is the most advanced and widely used one at present. But the unified reference frame model adopts the mixing description of differential equations and algebraic equations, so it is not convenient to analyze the static and dynamic characteristics of BDFMs.
In addition, the supply of a BDFM is dual source, and the motor torque is the sum of the asynchronous torque and synchronous torque. Due to the interaction between the two types of torques, the motor torque control process from a setting value to another setting value is rather complex, and oscillation and loss of control appear easily [
16,
17]. To solve these problems, researchers have been made a lot of efforts, and there are mainly three different methods, the method of working point linearized small signal model, the method of feedback linearization, and the method of DTC robustness control.
In the method of working point linearization, the BDFM stability was analyzed by the working point linearized small signal model, which pointed out that the stable operating range of BDFM was narrow under open loop control. Experimental and theoretical results showed that a small rotary inertia or a high CM voltage led to a wide stable operating range [
18,
19,
20]. The working point linearized small signal model is related to the motor parameters, rotary inertia and the parameters of the controller, and changes with the working point of the system, so this method can only study the local stability of the system.
Feedback linearization was first applied to the BDFM based on a state-space model in the rotor reference frame. The model selected the currents, rotor angle, and angular speed as the states. Taking only the speed as the output, the input-output feedback linearization method was used to solve the problem of speed control of BDFM, where in addition to all the motor parameters, load torque and rotary inertia must also be known [
21]. When an inner current loop of CM is adopted, the control motor can be seen as supplied by a current source, a state-space model of CM synchronous reference frame was obtained. The model selected the stator flux of the PM and the rotor flux of the CM as the states. Taking the torque and the rotor flux of CM as the output, the input-output feedback linearization was developed by the rotor flux of CM oriented, and the decoupling control of torque and flux was achieved, where all the motor parameters need to know, the toque and flux need to observe, and the control strategy is complex [
22].
After the development of the vector control, direct torque control (DTC) is an another high-performance AC motor control method. Since Takahashi presented DTC for an induction machine in 1986 [
23], the DTC technique has been widely used in AC machine control because of its simple structure, high dynamic performance, and robustness [
24,
25]. The conventional DTC was introduced directly into the variable speed system of BDFM. Through the analysis of relationships among the converter voltage vectors and the derivatives of flux and torque, the losing control problems of BDFM are investigated, and the flux priority and torque priority strategies are proposed [
26]. However, these strategies cannot eliminate the flux and torque ripples. For the flux and torque ripple problems of BDFM’s DTC, some researchers have put forward many solutions, such as the fuzzy logic direct torque control and predictive direct torque control, etc., but the results of these efforts are not obvious [
27,
28].
The remainder of this paper is organized as follows:
Section 2 introduces the derivation process of a synchronous reference frame state-space model (SSSM).
Section 3 obtains the possible static operation range of the BDFM.
Section 4 presents the Synthetic Vector Direct Torque Control (SVDTC) to solve the flux and torque losing control problems. In
Section 5, the comparative simulation experiments of the conventional DTC and the SVDTC are performed and the results confirm the good performance of SVDTC. Finally, conclusions are summarized in
Section 6.
2. Synchronous Reference Frame State-Space Model of Brushless Doubly Fed Machine (BDFM)
For a wound rotor BDFM, in the rotor reference frame (
dq reference frame), the stator and rotor voltage equations of the BDFM’s power motor (PM) are:
The stator and rotor voltage equations of the BDFM’s control motor (CM) are:
where
represents the unit imaginary,
is the rotor machinery angular speed,
and
are the PM and CM pole pairs respectively,
,
,
,
are the stator voltage, rotor voltage, stator current and rotor current of the PM respectively,
,
,
and
are the stator voltage, rotor voltage, stator current and rotor current of the CM respectively, and:
are the stator flux of the PM, stator flux of the CM, rotor flux of the PM, and rotor flux of the CM, respectively. All the variables of the voltages, currents and fluxes are complex numbers. The complex variable is a vector on the plane, so it is also called as “vector” in the following.
Because of the cross connection of the rotor windings of the PM and CM, the phase sequence of the rotor windings are opposite, as shown in
Figure 1. Between the rotor three-phase voltages and currents, there are the relationships
,
,
and
,
,
, i.e.,
,
and
,
, or
,
, where the superscript * expresses the conjugate operation.
Take the rotor currents of the PM as reference, define the rotor current complex variable
, combine the two rotor voltage equations of Equations (1) and (2), then we have:
Due to the special structure of the rotor winding, when a steady sine current flows in the rotor winding, two magnetic fields are generated in the stator and rotor windings of the PM and CM, and they rotate with equal electrical angular speed and in opposite directions relative to the rotor. Thus, in the rotor reference frame, and under the static state, the complex variables of the PM and CM are two sets of rotation vectors, their speeds are same, and their directions are opposite. The complex variables of the PM remain unchanged, and take negative conjugate operation in both sides of control motor voltage equation, we have:
and:
where
,
,
are the redefined complex variables,
,
are the rotor resistance and rotor inductance of the BDFM and the electromagnetic torque of the BDFM can be expressed as:
For the wound rotor BDFM discussed above, except that the methods of conjugate transformation are different (the complex variables of the CM take negative conjugation or conjugation), the obtained Equations (5) and (6) have the same form as the unified reference frame model of a cage rotor BDFM [
15]. Therefore, the following obtained results are universally suitable for a wound rotor and cage rotor BDFM.
In this way, under the static state, the complex variables of the PM and the complex variables of the CM (after taking negative conjugation) rotate in the same direction and have the same speed relative to the rotor. This will bring great convenience for analysis.
The motion equation of BDFM is:
where
and
are the electromagnetic torque and load torque respectively,
J is the total motor shaft rotary inertia.
Equations (5) and (6) adopt the mixing description of differential equations and algebraic equations. This will lead to some difficulties in analysis and design. This study will give a state-space description of BDFM, which is more effective form for the control system analysis and design.
Take the stator flux of the PM
, stator flux of the CM
, and rotor flux
as the states, the stator voltage of the PM
and stator voltage of the CM
as the inputs, substituting Equation (6) into Equation (5), to eliminate the currents
,
, and
, we have the state-space model as follows in the rotor reference frame:
where
,
,
and
,
.
Similarly, the electromagnetic torque can be again expressed as:
In this way, different from Equation (7), the electromagnetic torque is represented as the cross product of fluxes.
As we see, the BDFM is a 7th order nonlinear system (the complex number state-space model of BDFM Equation (9) is a 3 × 2 = 6th order derivative equation, the motion equation of BDFM Equation (8) is a 1st order), and in the rotor reference frame, its complex variables are still AC variable. Therefore, the model should be transformed into the CM synchronous reference frame (mt reference frame). In the synchronous reference frame, the vectors of the complex variables of the PM and the negative conjugation complex variables of the CM will rotate synchronously under the static state.
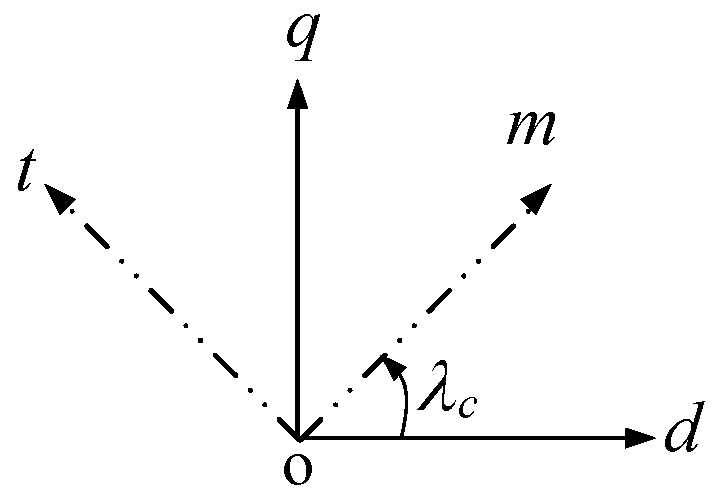
As shown in
Figure 2,
is the angle between the
mt reference frame and the rotor reference frame. Using the following transformation:
where
,
, the synchronous reference frame state-space model (SSSM) is obtained, that is:
where
,
,
,
,
,
.
The electromagnetic torque can be re-expressed as:
and the motion equation is same as Equation (8). Because the rotation transformation does not affect the cross-product operation of two vectors, the torque expressions before and after rotation transformation, Equations (10) and (13), are the same form. In the
mt reference frame, all variables of state equations are DC values under the static state. The static working point is easily obtained.
3. Static Load Capacity of Brushless Doubly Fed Machine
Using the SSSM of the previous section, the relationships among flux, torque and speed under the static state can be easily obtained. The load capacity of BDFM is analyzed by applying these relationships.
When the
mt reference frame orients on the stator flux of the CM
, there is:
where
is the stator flux amplitude of the CM. To analyze the static load capacity of BDFM, let the derivatives of the states are zero in Equation (12), and the static equations of BDFM are obtained as follows:
where
is the slip velocity of the stator flux of the CM relative to the
d axis of the rotor reference frame. In practice, the CM is supplied through a converter (the stator flux amplitude of the CM will be a constant by a stator flux of the CM feedback control), and the stator of the PM is connected directly to the power grid. Therefore, the voltage amplitude and frequency of the PM are constant, and there are the following constraint conditions:
where
and
are the frequency and electrical angular velocity of the PM power supply, respectively. The BDFM has the operation characteristics of the synchronous motor, when the frequency of the PM and the motor speed are constant, the slip is constant, and from Equation (13), the torque is adjusted by the angle between the stator fluxes of the CM and the PM. Even though the flux amplitudes of PM and CM can keep constant, the output torque are limited. Otherwise, with the increase of the stator current, the voltage drop in stator resistance of the PM will lead to the reduction of the PM exciting level, and the output torque is further limited. In the following discussion, the limitation of the stator voltage of the CM will not be taken into account. That is to say, for any
,
and
, there is always a supply voltage of the CM
that meets Equation (16), Equation (16) need not be considered. Nevertheless, for a certain stator flux of the CM
, speed
, by Equations (13), (15), (17) and (18), the solutions of
and
(its components of
m axis and
t axis are real number) are only obtained in a certain range of torque. Then we can get the upper and lower limits of BDFM’s load capacity.
For getting the solutions of the stator flux of the PM
and the rotor flux
, firstly, by multiplying the conjugate of
in both sides of Equation (17), the relationship between the rotor flux, the stator fluxes of the PM and CM, and the slip velocity is given as:
Substituting Equation (19) into Equation (13), to eliminate the rotor flux
, the electromagnetic torque can be expressed as:
where
,
,
,
,
,
are only the functions of the motor parameters and slip velocity, and they are constant under the static state.
In the electromagnetic torque expression of Equation (20), there are four terms. The first term is the asynchronous torque of the PM, and the fourth term is the asynchronous torque of the CM. The second and third terms are the synchronous torque. It can be seen that, for a certain slip velocity and stator flux amplitude, the two asynchronous torques are constant, and always have opposite directions. When the slip velocity is relatively large (this is the majority working condition of BDFM), and the rotor impedance relatively small ( is relatively small), , , and will be small, and the asynchronous torque of BDFM can be neglected. Therefore, the electromagnetic torque of the BDFM is controlled by the synchronous torque, and it is only determined by the angle between the two stator fluxes.
Secondly, substituting Equation (19) into Equation (15), to eliminate the rotor flux
, the relationship between the stator voltage of the PM and the stator fluxes is obtained as:
where
,
,
,
,
are only the functions of motor parameters and slip velocity.
Furthermore, substituting Equation (21) into the constraint condition Equation (18), the relationship between the stator voltage amplitude of the PM and the stator fluxes is obtained as:
Combining Equations (20) and (22) and letting
(under the static state, the electromagnetic torque
equals the load torque
), the following equation is obtained:
where
,
,
,
are not only the functions of the motor parameters and slip velocity, but also related to the stator flux amplitude of the CM, among them, the
is also related to the voltage amplitude of the PM and load torque.
Equation (23) is complicated and difficult to obtain the analytical solutions. However, for a given , stator flux of the CM , speed (so the slip velocity is also given) and torque , the numerical solution of can be solved. Then, substituting the solved into Equation (22), the is obtained, and substituting the solved and into Equation (19), the is obtained. These solutions meet the conditions of Equations (15), (17) and (18). All real number solutions constitute the possible static operation range of the BDFM (Stability is temporarily not considered). When the torque arrives at a certain value, the solved is not a real number, that is, the torque reaches the upper limit or lower limit of the static solution range, corresponding to the maximum or minimum torque of the BDFM. In this way, looking for the static working range of the BDFM is transformed to find the real solutions of Equation (23).
4. Losing Control Problems of Conventional Direct Torque Control (DTC) for BDFM and Its Improved Strategy
As mentioned above, the model of the BDFM is complex, and in practice its parameters are difficult to measure. DTC has less dependence on motor parameters, and specifically, it is not dependent on the rotor parameters. This is especially important for the BDFM control system design. However, compared to the induction motor, the flux and torque losing control problems of the BDFM’s conventional DTC are more evident (There may exist some time intervals, where the flux and the torque cannot be controlled simultaneously, the flux and torque ripples exceed the hysteresis ring). In Reference [
26], the losing control problems of the BDFM are investigated, and flux priority and torque priority strategies are proposed. However, these strategies cannot eliminate the flux and torque ripples. In this paper, the causes of losing control problems are analyzed deeply, and an improved control strategy of DTC is proposed to solve these problems.
In the
mt reference frame, the CM stator flux amplitude and the torque derivative equations about time are as follows:
Substituting Equation (12) into Equations (24) and (25), we have that:
where
,
,
,
,
,
,
,
,
,
are only the functions of motor parameters, and independent of motor working points. Obviously, the CM stator flux amplitude and the torque derivatives have no relationship with the selection of coordinate, thus, the derivatives of Equations (26) and (27) can be transformed into the two-phase static reference system (
αβ reference frame), so we have:
For the static working points (discussed in the previous section), the output torque and the motor speed are constant. Using the stator flux of the CM as the reference (the initial phase angle of the stator flux of the CM is zero), the amplitudes of all vectors, the angles among these vectors are const, and they can be expressed as:
where
is the synchronous angular speed of the stator voltage of the CM,
is the angle between the stator flux of the PM and stator flux of the CM,
is the angle between the stator flux of the CM and rotor flux, and
is the angle between the stator voltage and stator flux of the PM. The stator of the CM is supplied through a converter, and the converter output voltage vectors are as follows:
where
is the DC bus voltage, and
correspond to the six fundamental nonzero voltage vectors (three-phase two level converter, six fundamental voltage vectors and two zero voltage vectors). Substituting Equations (30) and (31) into Equations (28) and (29), we obtain the stator flux amplitude of the CM and torque derivative equations around the static working points are as follows:
where:
are constant (but change with working points), and they are the derivative values of the stator flux amplitude of the CM and torque when the converter output voltage is the two zero voltage vectors, respectively.
As mentioned above, if the asynchronous torque is neglected, we have:
where:
For a large power motor, the stator resistance of the CM is small. Because , and are proportional to the stator resistance of the CM and the stator flux amplitude will decrease when the converter output voltage is zero, A is always small and negative. The stator flux amplitude of the CM and the torque derivatives are sinusoidal with the synchronous angle , and when the converter output voltage is different fundamental voltage vectors (), the electric angles of these derivative curves are apart in turn. For a given voltage vector , the angle between the stator flux amplitude of the CM derivative curves and the torque derivative curves changes with the variation of the working points.
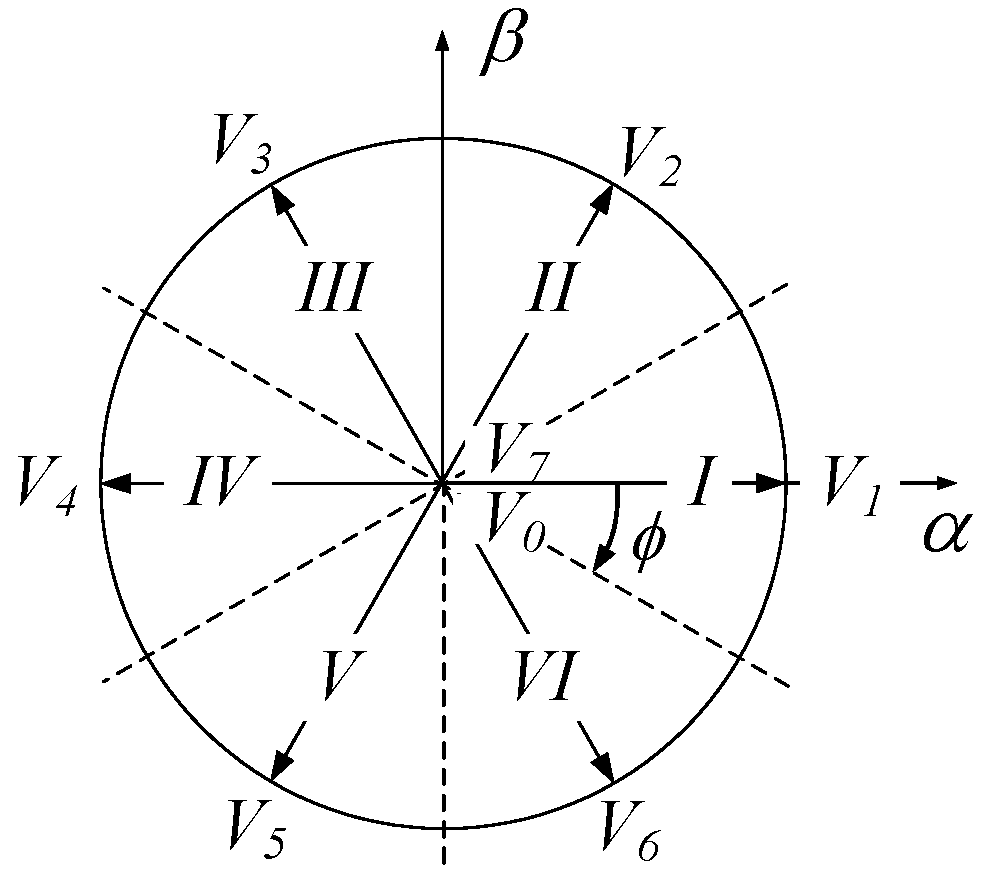
For conventional DTC, there are the six nonzero voltage vectors,
V1–
V6. As shown in
Figure 3, the two-phase static reference frame is divided into six sectors (sector
I–
VI), each sector occupies
, and the angle
between the boundary of sector
I and the
α axis is
.
In the follow discussion, a rated power 3.7 kW BDFM is used as an example, the parameters of which are shown in the
Appendix A, and the supply voltage and frequency of the PM are 220 V/50 Hz. Using the Equations (32) and (33), the stator flux amplitude of the CM and the torque derivative curves are shown in
Figure 4a,b.Where the stator flux of the CM is 1.2 Wb, the motor speed is 62.8 rad/s (subsynchronous), and the output torques are 30 Nm (motoring mode) and –30 Nm (generating mode). It is clear that the flux derivative curves of the two nonzero voltage vectors with
phase difference are symmetrical about the line of
. In each sector, there must be two flux derivative curves, their signs will be changed, and the two corresponding voltage vectors cannot be selected, because they cannot provide a fixed response direction of flux. Similarly, the torque derivative curves of the two fundamental nonzero voltage vectors with
phase difference are symmetrical about the line of
, there must be two torque derivative curves in each sector, their signs will be changed, and the two corresponding voltage vectors cannot be selected. In each sector, if the above four voltage vectors are not the same, as shown in
Figure 4a,b, there will be four voltage vectors, they cannot be selected. Obviously, the rest of two voltage vectors cannot satisfy the four kinds of control requirements: decreasing in flux and torque, decreasing in flux and increasing in torque, increasing in flux and decreasing in torque, and increasing in flux and torque. The selection of the voltage vector can only make the losing control time as short as possible. In
Figure 4c,d, the flux derivative curves of sector
I are enlarged to show the regions of the flux losing control more clearly.
Thus, the voltage vector switch tables can be obtained under the motoring mode and generating mode, as shown in
Table 1 and
Table 2, called the conventional DTC. From the sector
I to the sector
VI, the electric angles of voltage vectors selected for the same control requirements are
apart in turn. The control system is shown in
Figure 5. Under the motoring mode, the flux will lose control when an increase in flux and a decrease in torque, or an increase in flux and an increase in torque are desired, corresponding to the third and fourth rows in
Table 1 (that is the circular region in
Figure 4c). Under the generating mode, the flux will lose control when an increase in flux and a decrease in torque, or an increase in flux and an increase in torque are desired, corresponding to the third and fourth rows in
Table 2 (that is the circular region in
Figure 4d).
From
Figure 4a,b, it can be also seen that if the angle
φ is increased, the flux losing control can be eliminated under the action of the voltage vector
V6, but the flux losing control will be serious under the action of the voltage vector
V2. On the contrary, if the angle
φ is decreased, the flux losing control can be eliminated under the action of the voltage vector
V2, but the flux losing control will be serious under the action of the voltage vector
V6. Therefore, it is useless to solve the flux losing control by changing the angle
φ. Because the DC component
A of the flux amplitude derivative is relatively small in general situations, the time interval of the flux losing control is short, and the range of the flux fluctuation is small. When the load is light, the torque will not lose control.
With the increase in torque, the DC components
A and
B are increase, the phase angles of the flux derivative curves remain unchanged, and the torque derivative curves move right or left (motoring or generating modes) relative to the flux derivative curves. In
Figure 6a,b,the stator flux of the CM and the torque derivative curves are shown, where the stator flux of the CM is 1.2 Wb, the motor speed is 62.8 rad/s (subsynchronous), and the output torques are 55 Nm (motoring mode) and −99 Nm (generating mode). The voltage vector switch tables can be obtained, which are same as the
Table 1 and
Table 2. When the load is heavy, the flux and the torque will all lose control. Under the motoring mode, the torque will lose control when a decrease in flux and an increase in torque, or an increase in flux and a decrease in torque are desired, corresponding to the second and third rows in
Table 1 (that is the losing control regions I and II in
Figure 6a). Under the generating mode, the torque will lose control when a decrease in flux and a decrease in torque, or an increase in flux and an increase in torque are desired, corresponding to the first and fourth rows in
Table 2 (that is the losing control regions II and I in
Figure 6b).
Similarly, from
Figure 6a,b, it can be also seen that if the angle
φ is increased, the flux losing control can be eliminated under the action of the voltage vector
V6, but the flux losing control will be serious under the action of the voltage vector
V2, and the torque losing control will also be serious under the action of the voltage vectors
V3 and
V6. On the contrary, if the angle
φ is decreased, the flux losing control can be eliminated under the action of the voltage vector
V2, and the torque losing control also can be eliminated under the action of the voltage vector
V3 and
V6, but the flux losing control will be more serious under the action of the voltage vector
V6. Therefore, the losing control problems of the conventional DTC cannot be solved by changing the angle
φ.
From the analysis above, it can be seen that the BDFM’s conventional DTC easily loses control, because the selected voltage vector are fewer and the sector is relatively wide. The losing control problems cannot be improved by increasing the switch sectors, or by changing the angle φ between the boundary of sector I and the α axis. And increasing the DC bus voltage, the time of losing control will decrease, but the losing control phenomena would not disappear. Therefore, for the BDFM’s DTC control system, the flux and torque losing control phenomenon always exist and are inevitable.
Without changing the converter topology, the new voltage vectors are synthesized by the six fundamental voltage vectors. As shown in
Figure 7, the
V12 is synthesized by the
V1 and
V2, the
V23 is synthesized by the
V2 and
V3, the
V34 is synthesized by the
V3 and
V4, the
V45 is synthesized by the
V4 and
V5, the
V56 is synthesized by the
V5 and
V6, and the
V61 is synthesized by the
V6 and
V1. The duty ratio of two fundamental voltage vectors related to every synthesized voltage vector are
. The six fundamental voltage vectors and the six synthesized voltage vectors, there are twelve voltage vectors. At the same time, the switch sectors also increase to twelve, each sector occupies
, and the angle
φ is
. The following will point out that the losing control problems can be solved by increasing the number of voltage vectors and the switch sectors simultaneously, and combined with the appropriate choice of angle
φ.
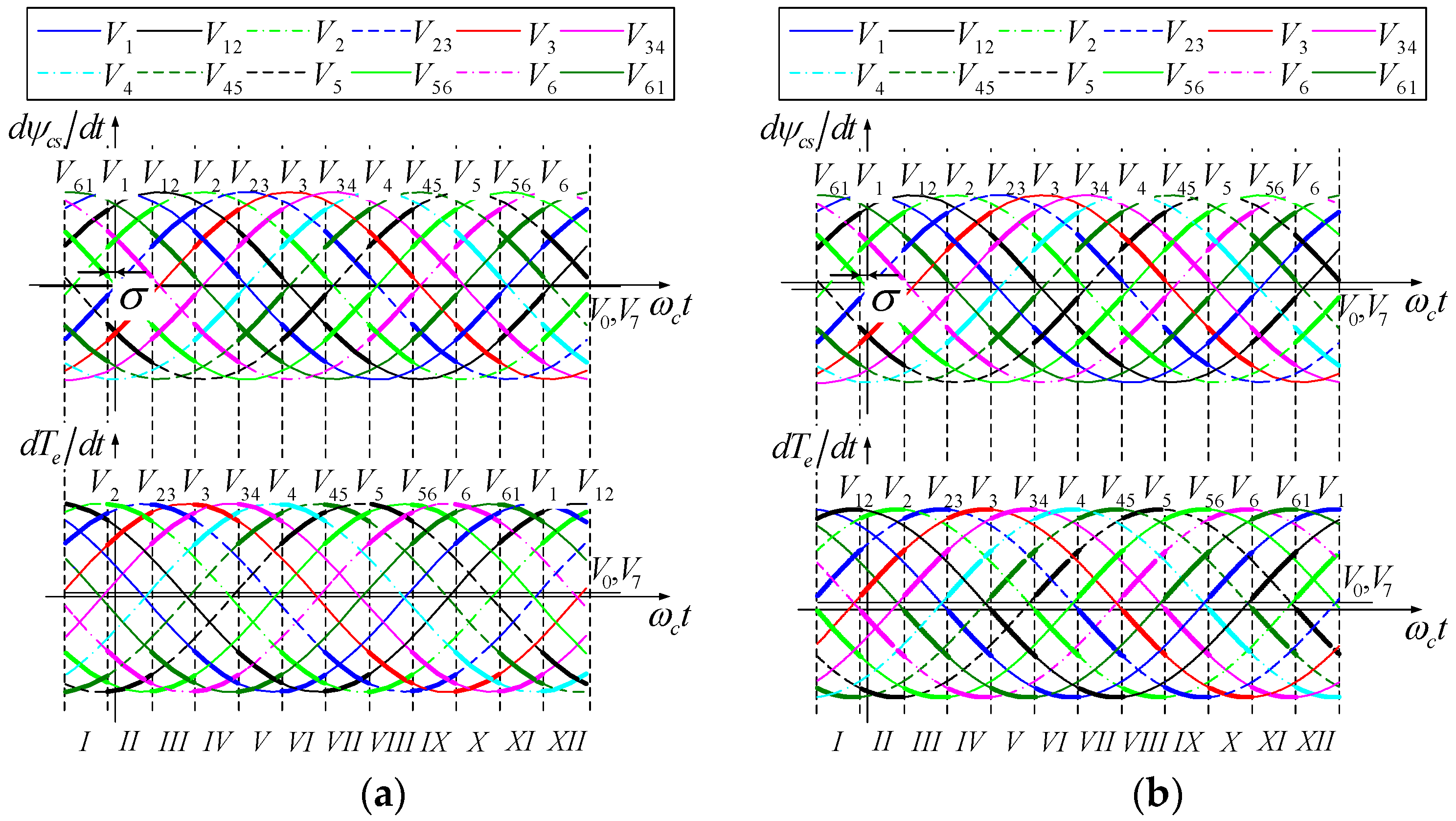
After adding synthesized voltage vectors, the stator flux amplitude of the CM and the torque derivative curves are shown in
Figure 8a,b, where the stator flux of the CM is 1.2 Wb, the motor speed is 62.8 rad/s (subsynchronous), the output torques are 30 Nm and 59 Nm (light load and heavy load under the motoring mode), and the angle
φ = −15°–
σ = −21 has been chosen properly.
Similarly, in each sector, there are also two flux amplitude and two toque derivative curves, their signs change inevitably, the corresponding four voltage vectors cannot be selected. Among the rest of eight voltage vectors, the vectors, they can satisfy the control requirements of flux and torque and their derivative curves are farther from the horizontal axis, will be selected. In this way, the selection of voltage vector makes that the control effect is more obvious (good effectiveness and quick adjustment), and the effectiveness can be maintained (strong robustness) when the operating conditions (load torque, speed, etc.) change. Then twelve sectors voltage vector switch tables can be obtained, as shown in
Table 3 and
Table 4, and called SVDTC control strategy. From the sector
I to the sector
XII, the electric angles of selected voltage vectors for the same control requirements are
apart in turn. If the angle
φ is still
, the sector I as an example, the selected voltage vectors can satisfy the control requirements of torque, but the flux will lose control under the action of the voltage vector
V56. Because the DC component
A of the flux derivative is relatively small in general situations, only a small adjustment of
φ is needed in the basis of
. The analysis of the generating mode is similar to the motoring mode, the figures of its derivative curves are omitted here. The control system of SVDTC is shown in
Figure 9.
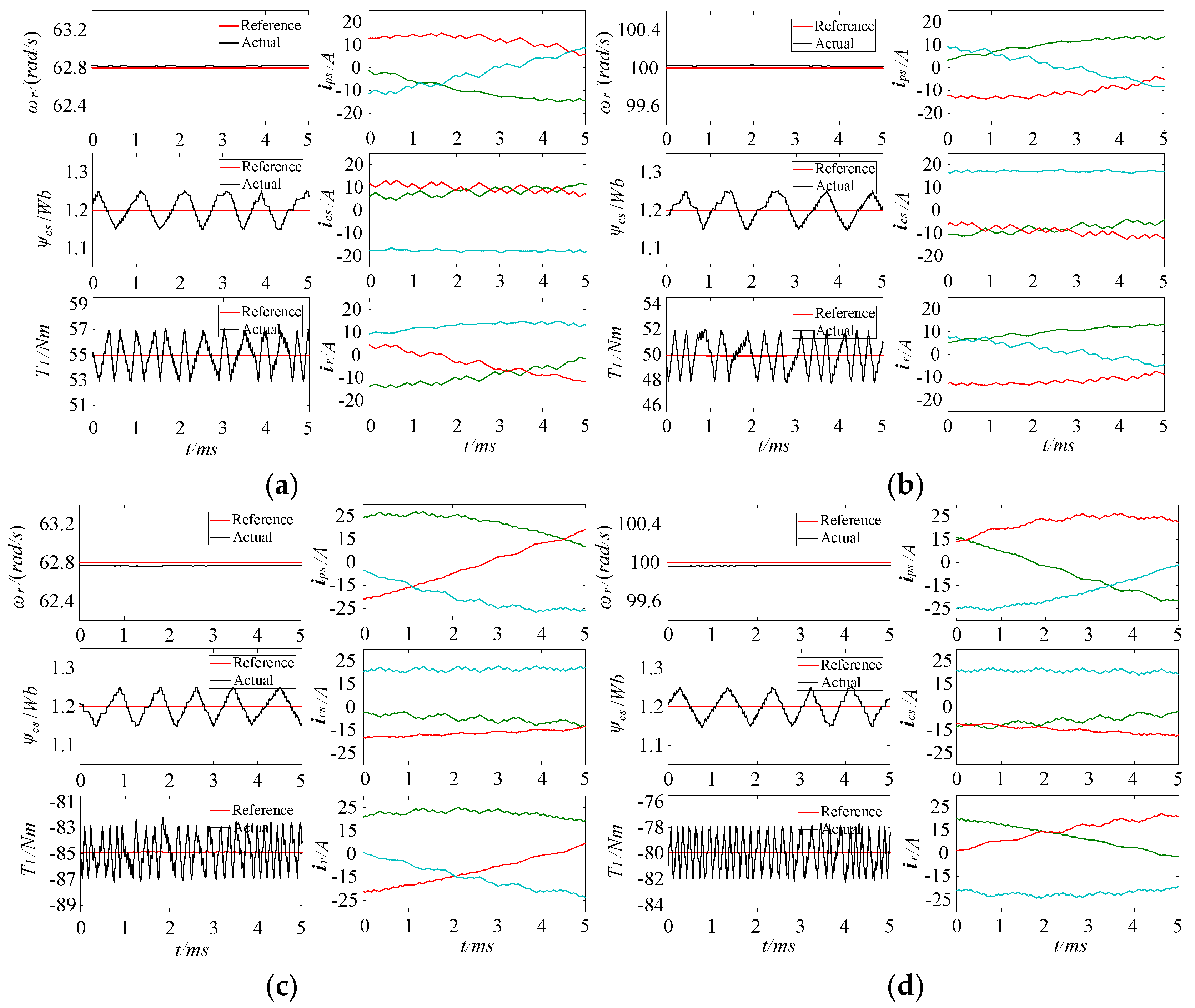
The following simulation will illustrate that the SVDTC not only can solve the flux and torque losing control problems of the conventional DTC, but also can make the BDFM output torque reach the theoretical output capacity limits.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}