In
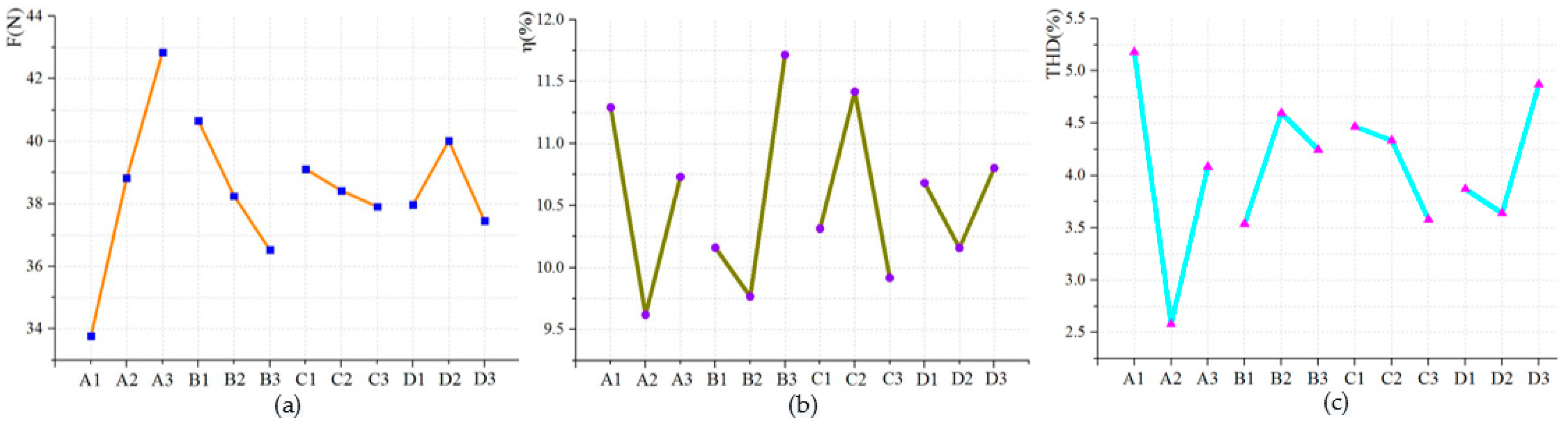
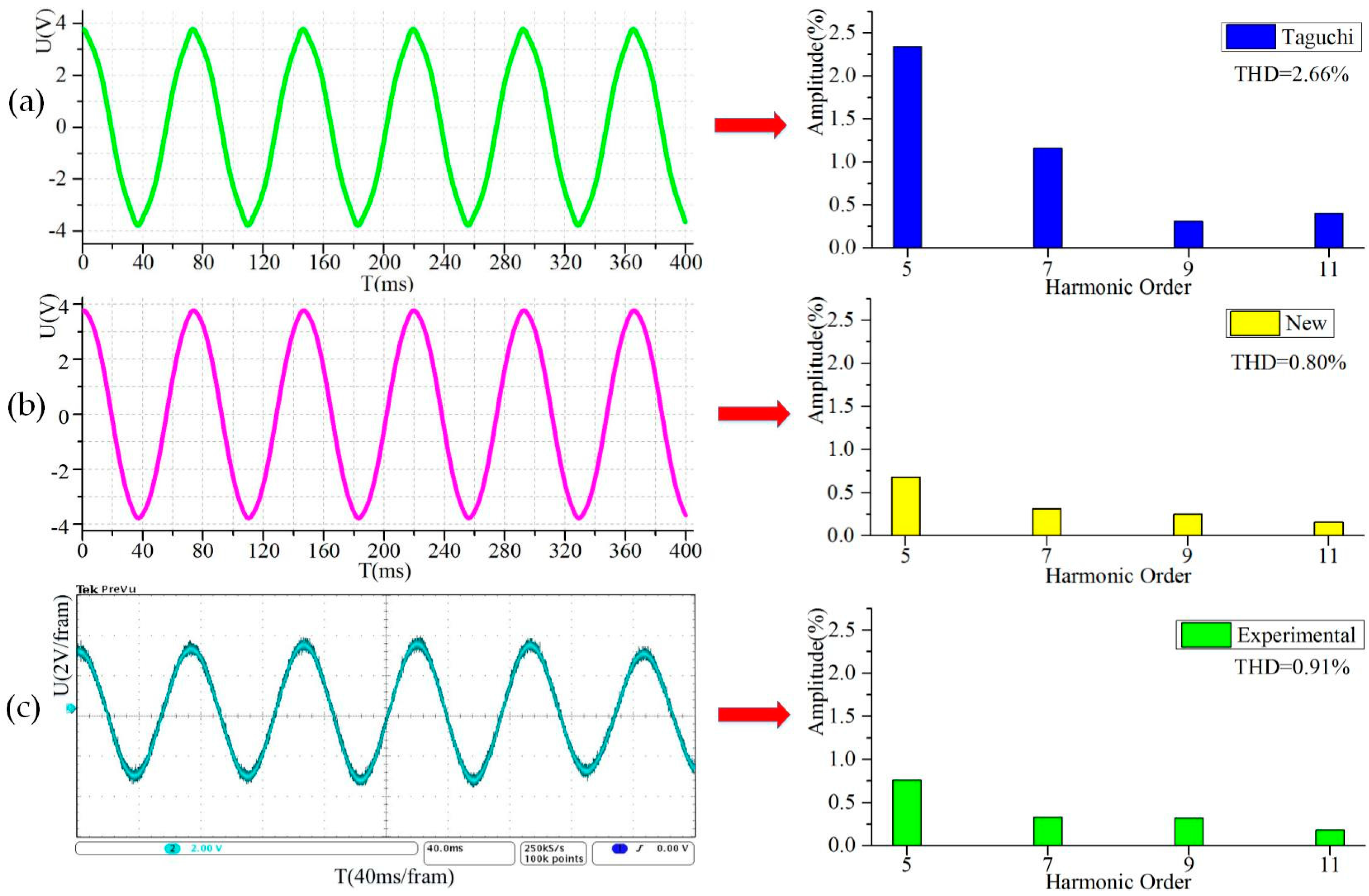
Section 3, the Taguchi method was conducted, which had some effect on PMSLM optimization. The optimization results are
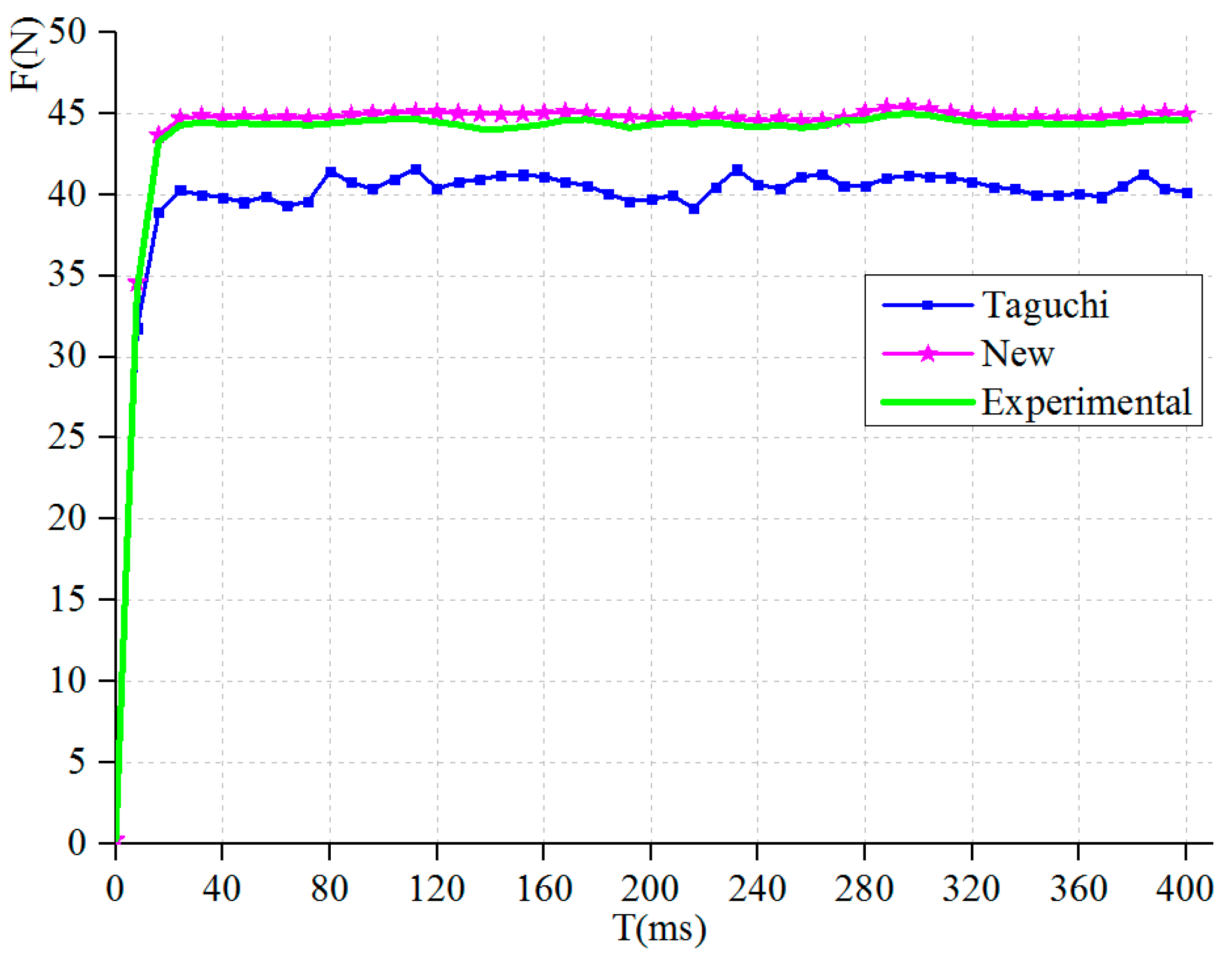
F is 40.241 N,
η is 6.342%, and the THD is 2.66%. However, it had one relatively serious shortcoming: in the optimization process, the four parameters and three levels can result in 3
4 = 81 combinations. This method based on FEA analysis, in which only nine groups of parameter combinations are analyzed, can promote the efficiency by using ANOM. However, given the one-sidedness produced by the discrete sample space of FEA, this method can only obtain the best optimization results from 81 discrete combinations, not from the global optimum of the parameter continuous value range. This method results in an approximate local optimum for the motor optimization design.
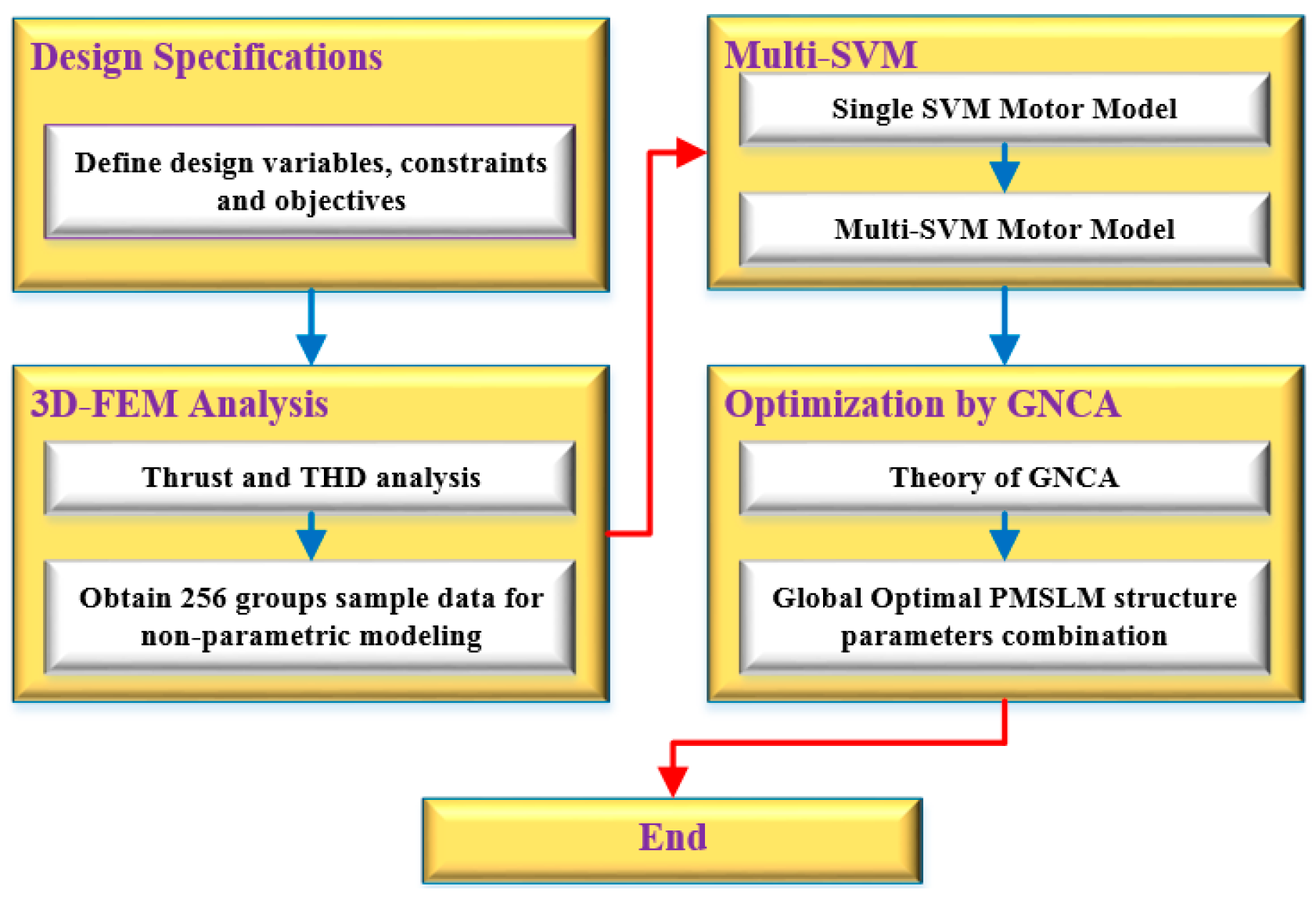
In this method, the 3D-FEA model is developed to obtain the accurate motor output performances after the definition of the design variables, constraints, and objectives. A total of 256 combinations of the structure parameters are analyzed by 3D-FEA to prepare for the following multi-SVM modeling. Multi-SVM is then introduced to build a quick non-parametric calculation model based on 3D-FEA analysis data. After regression, the multi-SVM motor model translates the discrete motor data space into continuous data space, which can avoid local one-sided optimization. Finally, the gravity center neighborhood algorithm (GCNA) is presented to optimize the multi-SVM motor model by locating the gravity center of the objective function. The global optimal combination of the structure parameters is obtained upon convergence of the iteration.
4.2. Multiple SVM for PMSLM
Exploring the objective function—F(
x), which can calculate any output value
y for any input
x, is the essence of SVM [
27,
28,
29,
30,
31]. The multi-SVM is the modified SVM algorithm, which contains the multidimensional vector output y. All of the structural parameters can be seen as the input parameters compared to all of the performances, which can be seen as the output parameters, by training the input parameters and output performances shown in
Table 7. The relations between the multidimensional inputs and outputs are obtained, and the output performances of any other input is subjected to regression calculation using the non-parametric relation between the inputs and outputs of the training data. The core steps of multi-SVM are as follows:
Step 1: Single SVM modeling. By training the input parameters and calculations for the output function F(
x), different SVM models (i.e., thrust SVM and THD SVM) are established. The kernel function—
K(
x,
z) of the single SVM model is selected as follows:
where
d is the number of dimension,
q is constant number, and
and
are the proportions of different kernels.
Step 2: Fusion of the single SVM models. Following the principle of structure risk minimum, the regression problem is translated into a constrained optimization problem after the best
W and
B in Equation (5) are searched with the fusion algorithm:
where
N is the dimension number of output performances,
C is the penalty parameter,
hi is the empirical error and
φ(
xi) is the nonlinear mapping function.
Aimed at the function fitting problem of N dimension inputs and M dimension outputs, the training sample is set as {(
xi,
yi),
i = 1, 2, 3…, L,
xi RN,
yi RM}. The multi-SVM objective function F(
x) is expressed as follows, where
K (
xi,
x) is the kernel function,
bi is the constant, and
wj is the regression coefficient:
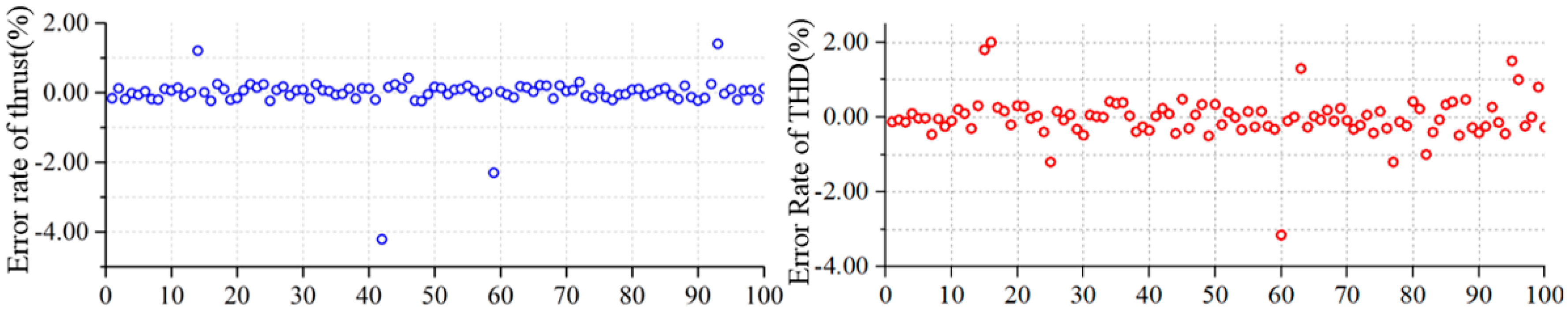
After 100 groups of input parameters data are imported to the multi-SVM model, 100 groups of output parameter data predicted by multi-SVM are compared with the original output parameter data.
Figure 7 shows that the accuracy of the multi-SVM motor model can reach 95.7% or even more and that the error rate can be limited to 1.2%. After the regression fitting of multi-SVM. The discrete data space by 3D-FEA is translated into a continuous data space, which can provide a quick calculation model for the succeeding GCNA optimization.
4.3. Gravity Center Neighborhood Algorithm
Gravity center can be seen as the force balance point that satisfies the “level principle” [
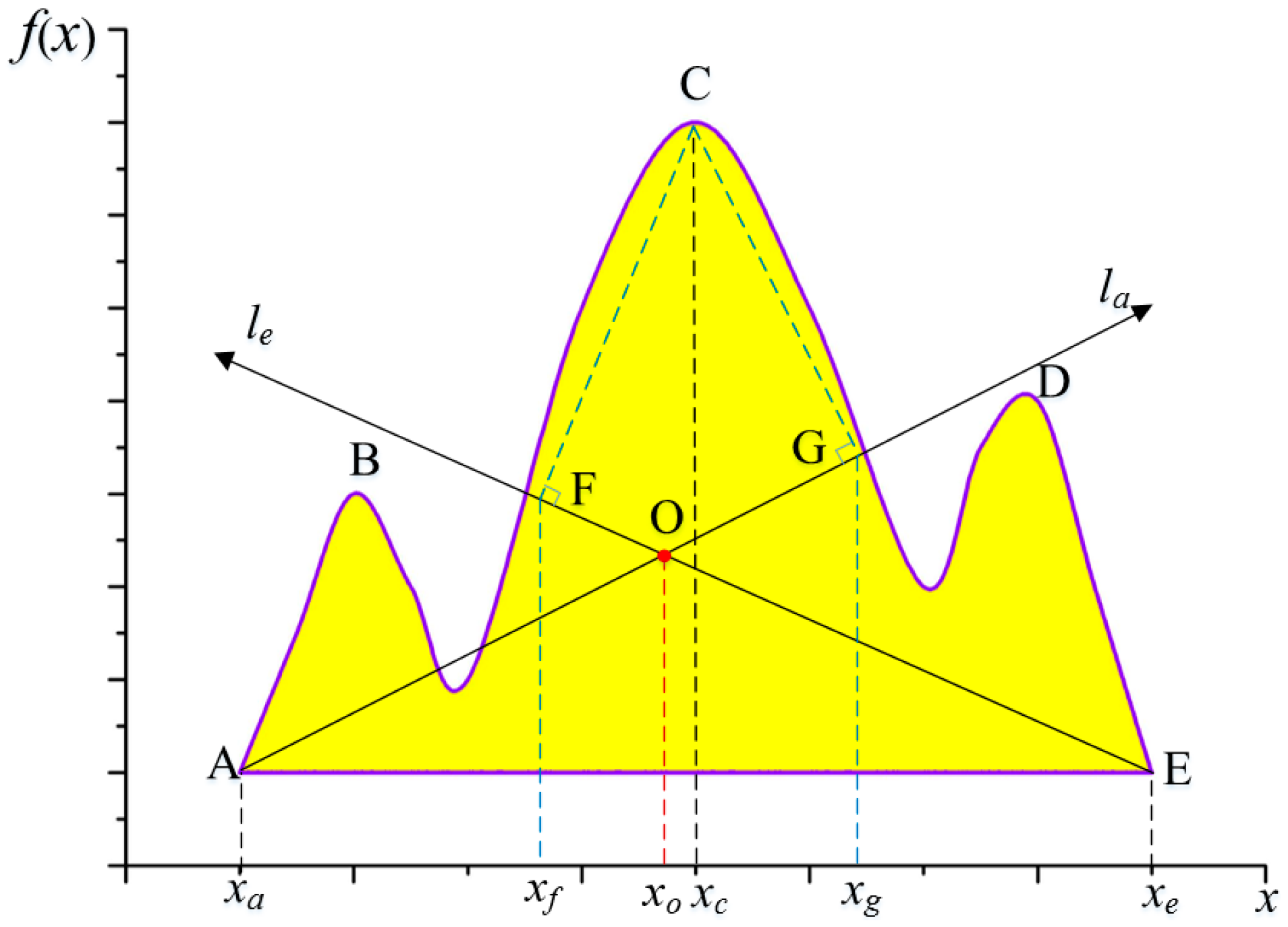
14]. The thin plank model-
f(
x) is shown in
Figure 8, where the points B, C, and D are the top of three bulges. The gravity center of the thin plank is determined by the object-hanging method. The gravitational lines
la and
le are obtained by choosing points A and E to hang up the plank, and the intersection O is the gravity center of this plank.
Evidently, points B and D are the extrema of f(x), given that point C is the global maximum of f(x). An interesting phenomenon is that the gravity center O is very close to the highest point C along the X-axis. This phenomenon can be explained by the knowledge of the moment equilibrium because the moments on both sides of the gravitational lines are equal. C must lie on the left by la and on the right by le, which can result in the location of the intersection O at the very close neighborhood of C along the X-axis. Assuming that the plank model f(x) can be expressed by the equations as f(x), the optimization problem is to find the global maximum of f(x). The two gravitational lines are determined by the location of the gravity center. CF and CG are the shortest distances from C to la and le. The neighborhood area of the global maximum can be expressed as [min (xf, xg), max (xf, xg)], and the neighborhood area decreases gradually by several times of the iterative computations. The global maximum is then obtained easily using the gravity center location method.
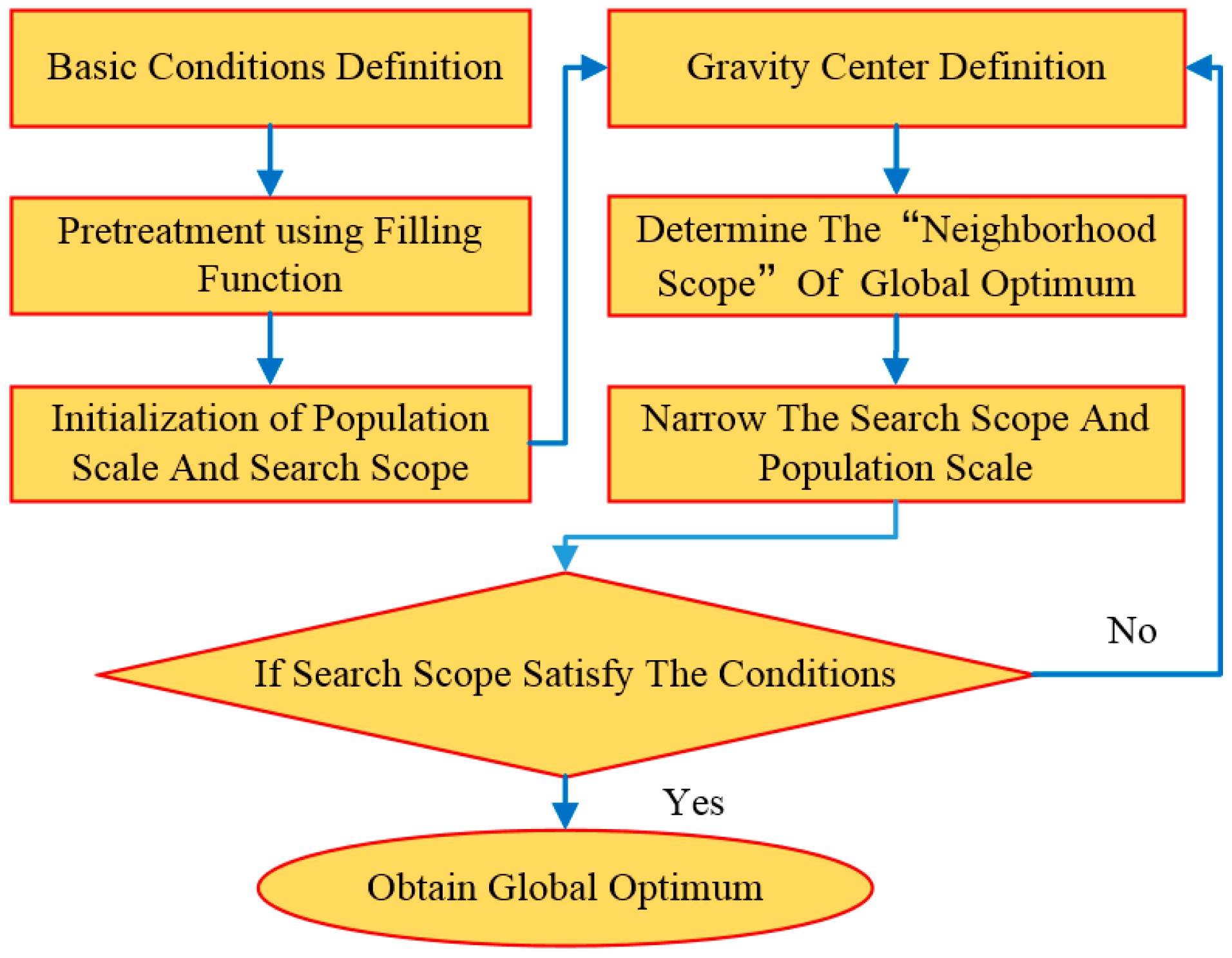
To avoid premature convergence and a local optimum, the GCNA is introduced. Its operating steps, as shown in
Figure 9, are as follows.
Step 1—Basic Conditions Definition
Confirm the objective function and optimize the variables and the range of parameters.
Step 2—Pretreament using a Filling Function
Select the “filling function” [
32,
33] shown in Equation (8) to promote the accuracy of the gravity center location and to avoid the local optimum:
where
x* is the current local extreme point, α is the parameter named “filling factor”, which influences the filling effect largely, and
φ(t) satisfies the following conditions:
- (1)
φ(0) > 0;
- (2)
φ(t) is derivable and t ≠ 0, φ’(t) > 0
Step 3—Initialization of Population Scale and Search Scope
Initialize the search scope Ω(0), which is determined by the variable ranges; the initialized population scale P(0) is determined by considering convergence rate and optimizing accuracy.
Step 4—Gravity Center Definition
The gravity center location of the objective function is determined via the following search strategy:
where F(
xb) is optimal of the before
k − 1 times iterations. This strategy can lead to movement of the “gravity center” along the direction of the global optimum effectively.
Step 5—Determine the “Neighborhood Scope” of Global Optimum
The neighborhood scope of the gravity center can be expressed by the follow equation:
where
η (
η < 1) is the scope compression rate,
d is the dimension of the optimizing scope, and
N is the search times
Step 6—Narrow the Search Scope and Population Scale
- (1)
The
kth search scope can be expressed as follows:
- (2)
The
kth population scope is expressed as follows:
where
ρ is an adjustable parameter.
Step 7—Condition of Convergence
When Equation (13) is set up, the search scope is equal to the neighborhood scope of the gravity center. The current gravity center can be seen as the global optimum. Otherwise, return to Step 4.
4.4. Optimization of PMSLM
This study adopts the GCNA to optimize the multi-SVM motor model. The parameters of the GCNA are shown in
Table 9, where
P(0) is initialized population scale, Ω(0) is the search scope,
d is the dimension of the optimizing scope,
η is the scope compression rate,
N is the search times, α is the parameter named “filling factor”, and
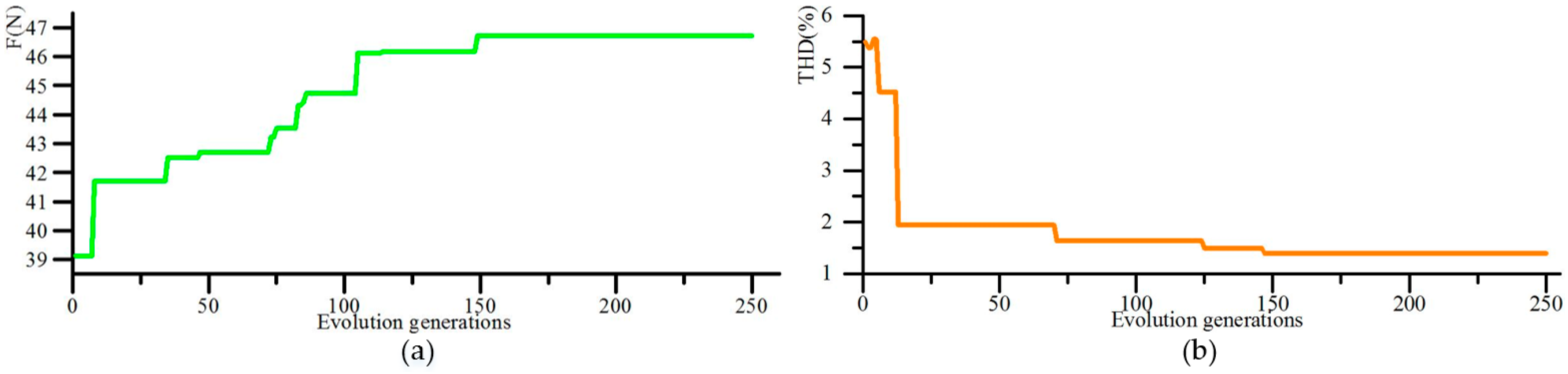
ρ is an adjustable parameter. The evolutionary process diagrams of the GCNA are shown in
Figure 10.
The global optimal combination of the PMSLM structure parameters is obtained after the iteration calculations of GCNA.
Table 10 shows the comparison of the structural parameters of the Taguchi method, new method, and experimental method clearly.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}