1. Introduction
Clean energy sources such as wind, photovoltaic, and fuel cells can be interfaced to a multi-level converter system for high power applications [
1,
2,
3]. The permanent magnet (PM) synchronous generator system has been used for a wind power generating system due to simpler structure, better reliability
etc. [
4,
5,
6,
7,
8]. The output behavior of a wind turbine is a nonlinear and time-varying system. Thus, the control of operating point is indispensable for maximum output power. The AC-DC converter is used to convert varied AC voltage generated by PM synchronous generator into DC voltage. Then, the DC-AC converter is used to convert DC voltage into AC voltage with fixed frequency in order to provide for the smart grid of utilization. Wind turbines (WTs) are rotating machines that can be used to generate electricity from the kinetic power of the wind. WTs can deliver appropriate energy to smart grid power via the power conveter. According to these purposes, the better structure for a power conversion in wind turbines is the AC-DC-AC power converter [
9,
10].
Over the past decade, many different control approaches were used for generators and WT for energy generation [
11,
12,
13,
14,
15]. In [
11], a fuzzy logic control is adopted to control the power of the wind electrical conversion system transmitted to the grid and generator speed. The advantage in using a fuzzy logic controller
versus a standard proportional-integral (PI) controller, is pointed out in better response to frequently changes in wind speed. In [
12], the rule-based fuzzy-logic based maximum power point tracking (MPPT) strategy is proposed for PM synchronous generator variable speed wind turbine generation systems. The fuzzy-logic-based output power smoothing method of a wind energy conversion system (WECS) with a PM synchronous generator using the inertia of WT was proposed in [
13]. In [
14], a sliding mode control (SMC) strategy associated with the field-oriented control of a dual stator induction generator (DSIG) based wind energy conversion systems was proposed to control the output power of a DSIG. In [
15], a fuzzy logic sliding mode loss-minimization control is adopted to control the speed of the PM synchronous generator, and PI controller is adopted to control the WT pitch angle. However, most of these approaches require the time-consuming trial-and-error tuning procedure to achieve satisfactory performance; some of them can not achieve satisfactory performance; and some of them do not possess online learning ability and given the stability analysis. Therefore, many neural network (NNs) control approaches were used for controlling the generator and WT systems for energy generation [
16,
17,
18]. In [
16], a radial basis function neural network (RBFNN) control is adopted to control the PM synchronous generator on variable speed WT generation system, and to control the WT pitch angle. In [
17], a new Elman NN control is adopted to control the PM synchronous generator, and to regulate the adjustable-pitch variable-speed wind-energy conversion systems. In [
18], a recurrent modified Elman neural network control (RMENN) control is adopted to control the PM synchronous generator using a WT emulator system. However, these NNs have also slower convergence speed due to adopted fixed learning rates of parameters in these recurrent NNs. Therefore, in order to reduce network complexity and speed-up convergence, the novel simpler NN structure of novel recurrent Chebyshev NN, which has not only self feedback connection in the Chebyshev layer but also recurrent connection between the output layer and the input layer, is more powerful than the recurrent NN for dealing with time-varying and nonlinear dynamic system, and the optimal learning rate of parameters in the novel recurrent Chebyshev NN are proposed to enhance convergence speed in this paper.
2. Literature Review
Artificial neural networks (NNs) have emerged as a powerful learning technique to perform complex tasks in highly nonlinear dynamic systems and controls [
19,
20,
21]. Some of the prime advantages of using NN are: their ability to learn based on optimization of an appropriate error function and their excellent performance for approximation of nonlinear functions. One of the major drawbacks of the NN is that it is computationally intensive and needs large number of iterations for its training. In order to reduce the computational complexity, a functional-link NN, which shown that it is capable of producing similar performance as that of NN but with much less computational cost, is shown in [
22,
23]. Moreover, a functional-link NN-based nonlinear dynamic system identification with satisfactory results has been reported in [
24]. It is shown that the performance of functional-link NN is similar to that of a NN but with faster convergence and lesser computational complexity. Moreover, a comprehensive survey on various applications of functional-link NN has been proposed in [
25].
Namatame
et al. [
26] first developed Pattern classification using Chebyshev NN. Li
et al. [
27] proposed Chebyshev polynomial-based unified model NN for static function approximation. It is based on a functional link NN with Chebyshev polynomial expansion in which recursive least square learning algorithm is used. It is pointed out that this network has universal approximation capability and has faster convergence than the multilayer feedforward NN. One of the solutions for the problem of slow convergence of multilayer feedforward NN is to use some efficient learning algorithm instead of the Backpropagation (BP) algorithm. In this direction, the scaled complex conjugate gradient algorithm as proposed by Moeller [
28] is of great importance. This algorithm chooses the search direction and the step size using information from a second order Taylor expansion of the error function. Some of the other proposals on higher order conjugate gradient algorithms are presented [
29,
30,
31]. Madyastha
et al. [
32] proposed multilayer feedforward NN trained by conjugate gradient algorithm to solve data classification and function interpolation problems.
The recurrent NN has received increasing attention due to its structural advantage in nonlinear system modeling and dynamic system control [
33,
34]. In the general recurrent NN, the specific self-connection feedback of the hidden neuron or output neuron is responsible for memorizing the specific previous activation of the hidden neuron or output neuron and feed to itself only. Therefore, the outputs of the other neurons have no ability to affect the specific neuron. If each neuron in the recurrent NN is considered as a state in the nonlinear dynamic systems, the self-connection feedback type is unable to approximate the dynamic systems efficiently. On the other hand, the feedbacks in the recurrent Chebyshev NN not only are self-connecting but they also store in the hidden neurons and feed to all the Chebyshev neurons. Hence, the recurrent Chebyshev NN, which proved to have more advantages than the basic Chebyshev NN including a better dynamic performance, a higher accuracy and a fast transient performance, is more powerful than the general recurrent NN for dealing with time-varying and nonlinear dynamic systems. The proposed novel recurrent Chebyshev NN in this study can be considered to be a special type of recurrent NN with feedback connections from the Chebyshev layer to the function layer. The function layer is an additional layer that is used as an extra memory to memorize previous activations of the hidden neurons and feed to all the hidden neurons after the one-step time delay. Therefore, compared with the general recurrent NNs [
33,
34], the proposed novel recurrent Chebyshev NN has a special explicit memory to store the temporal information. Due to the function neurons, it has certain dynamical advantages over static NN [
19,
20,
21] and it also has been widely applied in dynamical systems’ identification and control [
26,
27,
28,
29,
30,
31,
32].
Since the PM synchronous generators have a robust construction, and lower initial and lower maintenance costs, they are suitable for application to smart grid power applications. Due to nonlinear dynamics of PM synchronous generators using a WT system [
12,
13,
14,
15,
16,
17,
18], the recurrent NN controller may not provide satisfactory control performance. Therefore, the novel recurrent Chebyshev NN control system for a WT driving a PM synchronous generator system is proposed to regulate both the DC bus voltage of the rectifier and the AC 60 Hz line voltage of the inverter in this study. In addition, since this study is dealing with an isolated system with maximum power control, the exceeding power must be consumed to yield system power balance. The more realistic way of control is to choose the DC voltage as the controlled variable. Moreover, if the controlled plant has highly nonlinear uncertainties, the PI and PID controllers may also not provide satisfactory control performance. Therefore, both DC voltage control of the AC-DC converter and AC voltage of the DC-AC converter using the two sets of novel recurrent Chebyshev NN control systems are implemented in this paper. The on-line adaptive laws are derived based on the Lyapunov stability theorem so that the stability of the system can be guaranteed. An on-line training methodology with variable learning rate for the novel recurrent Chebyshev NN control system is proposed in this study. Finally, to demonstrate better dynamic characteristics of the proposed novel recurrent Chebyshev NN control system, comparative studies with the PI controller and the conventional NN controller are demonstrated by experimental results. The control performance of the proposed novel recurrent Chebyshev NN control system is much improved and can be verified by some experimental results.
4. Design of the Novel Recurrent Chebyshev NN Control System
From Equations (9) and (11), the output voltage for the rectifier and the DC-AC converter provided by PM synchronous generator system can be expressed as [
10,
35]:
where
is the output voltage of the rectifier,
is the output voltage of the inverter,
and
are the output voltage constants of the rectifier and the inverter,
and
are regulating magnitudes of output voltage in the rectifier and the inverter. Since
and
are considered as constants, differentiating both sides of Equation (13) with respect to time yields.
where
is the control effort of control system for the AC-DC converter and the AC-DC converter. The control problem of PM synchronous generator system is to control the change of control effort via the DC-AC converter and the DC-AC-DC converter so that the output voltage can provide a fixed voltage under the occurrence of the uncertainties such as the wide input voltages and load variations. The output error of voltage is defined as:
where
is the output reference voltage of the AC-DC converter and
is the output reference voltage of the DC-AC converter. The error
is different between the reference DC voltage and the measured DC voltage of the AC-DC converter. The error
is different between the reference AC voltage and the measured AC voltage of the DC-AC converter. If the system parameters are well known, the ideal controller can be designed as:
Combining Equations (14)–(16), then
. Taking Laplace transform, then
,
i.e.,
. If
is chosen to correspond to the coefficient of a Hurwitz polynomial
,
i.e., a polynomial whose roots lie strictly in the open left half of the complex plane, then
. Since the system parameters may be unknown or perturbed, the ideal controller
in Equation (16) can not be precisely implemented.
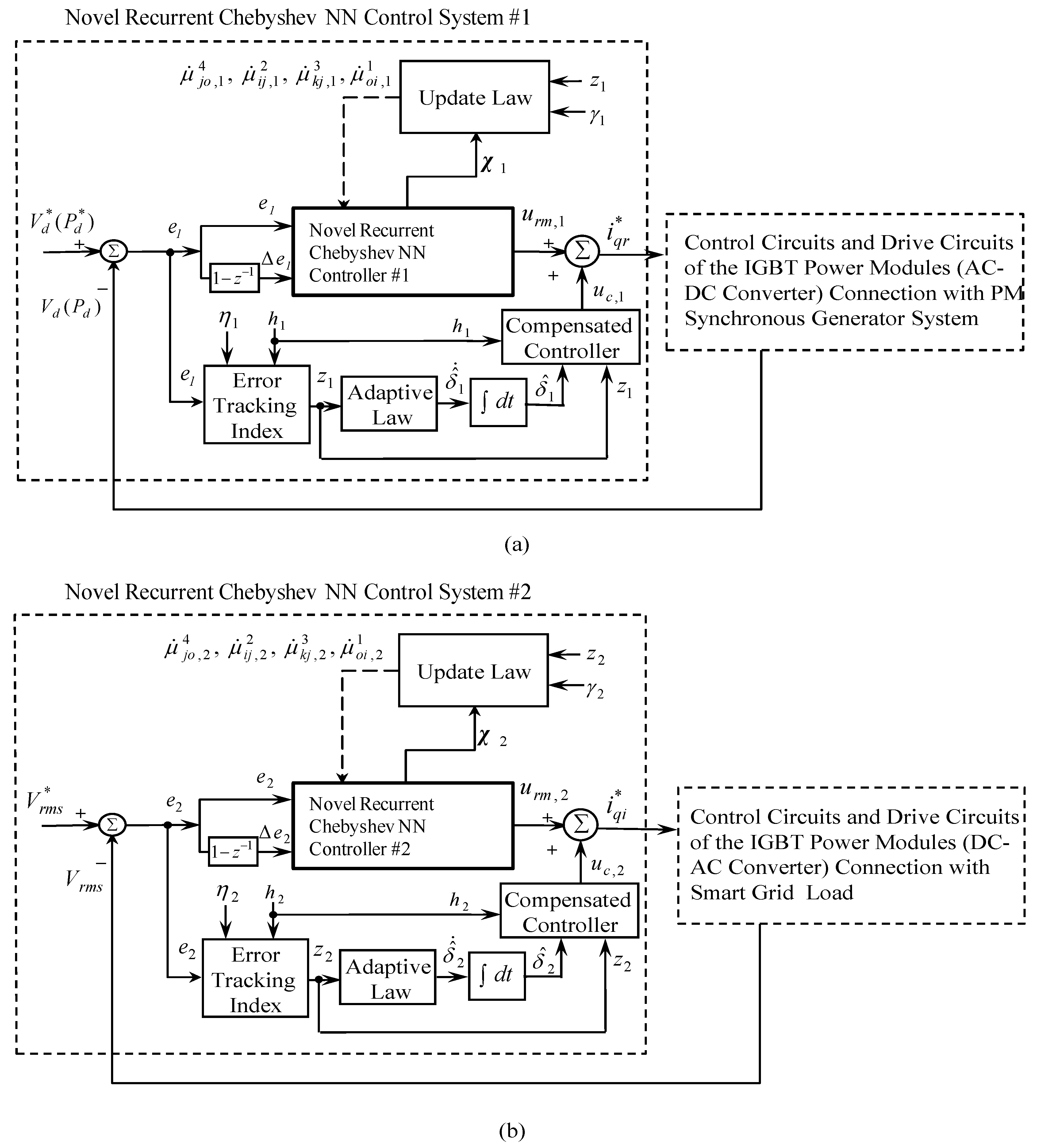
In order to efficiently control the output voltage of the PM synchronous generator system via the rectifier and the inverter, a block diagram of the novel recurrent Chebyshev NN control system with two sets of novel recurrent Chebyshev NNs as shown in
Figure 4 is introduced in this paper.
The configuration of the recurrent Chebyshev NN control system consists of the recurrent Chebyshev NN controller and the compensated controller,
where
is the novel recurrent Chebshev NN controller for the AC-DC converter and the DC-AC converter and
is the compensated controller for the rectifier and the inverter. The recurrent Chebyshev NN controller is designed to mimic the ideal controller and the compensated controller is designed to compensate for the difference between the ideal controller and the novel recurrent Chebyshev NN controller. Substituting Equations (17) into (14), then
the error equation governing the system can be obtained by combining Equations (15), (16) and (18),
i.e.,
4.1. Description of Novel Recurrent Chebyshev NN
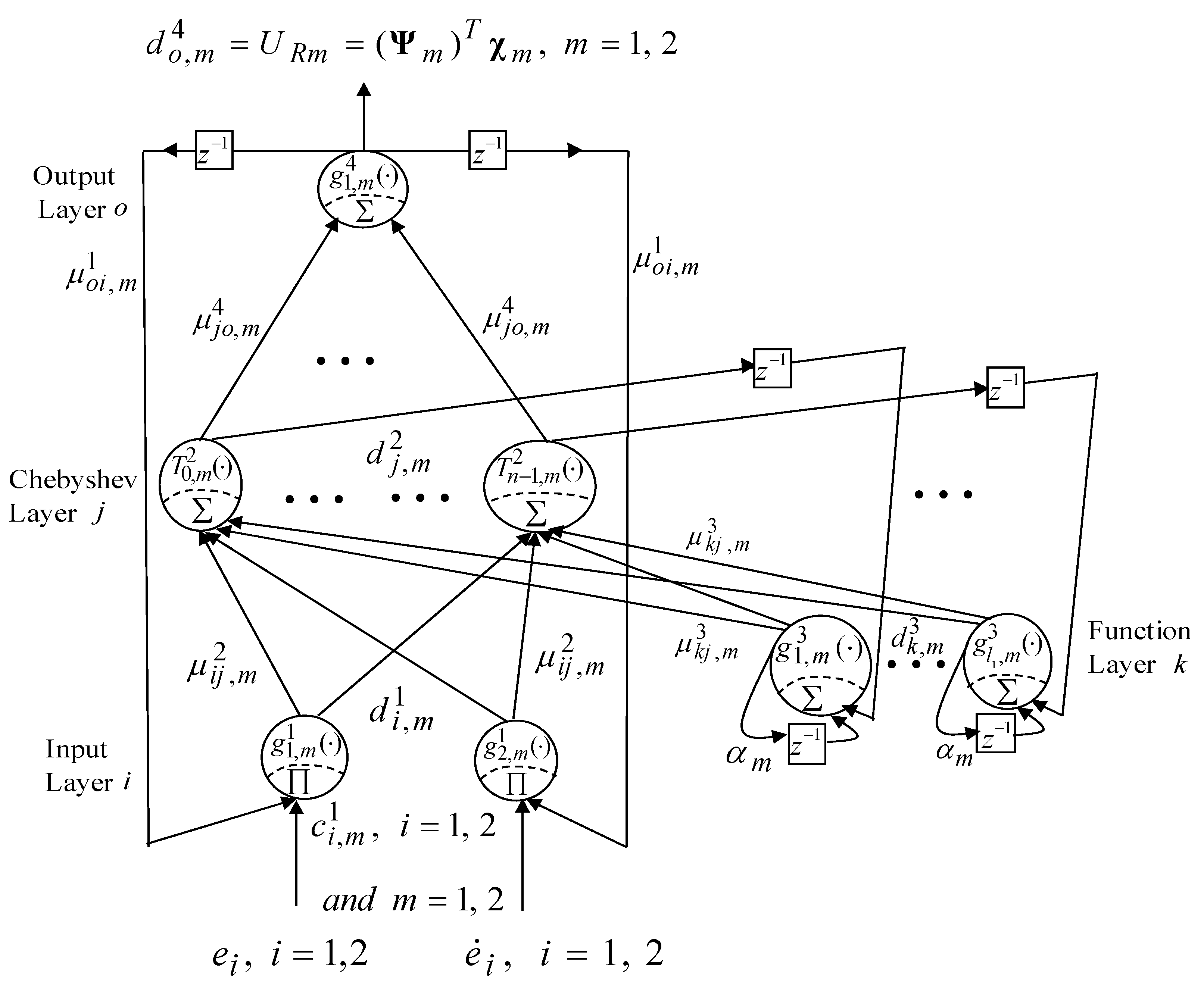
In the proposed four-layer novel recurrent Chebyshev NN with input layer using feedback signals from output layer are taken into account to result in better learning efficiency. The architecture of the four-layer novel recurrent Chebyshev NN shown in
Figure 5 consists of the first layer (the input layer), the second layer (the Chebyshev layer), the third layer (the function layer) and the forth layer (the output layer). The exciting functions and signal propagations of nodes in each layer of the novel recurrent Chebyshev NN are explained as follows:
4.1.1. First Layer: Input Layer i
In the first layer, the input signals and the output signals for each node
i in the
mth novel recurrent Chebyshev NN can be expressed as:
where
is the input of the
ith node in the
mth novel recurrent Chebyshev NN,
is the output of the
ith node in the
mth novel recurrent Chebyshev NN,
is the recurrent weight between output layer and input layer in the
mth novel recurrent Chebyshev NN, and
is the output value of the output layer in the
mth recurrent Chebyshev NN. The different inputs of the two sets of novel recurrent Chebyshev NNs are
,
for the rectifier, and
,
for the DC-AC converter, respectively. The
N indicates the number of iterations.
4.1.2. Second Layer: Chebyshev Layer j
In the second layer, the input signals and the output signals for each node
jth in the
mth novel recurrent Chebyshev NN can be expressed as:
where
is the Chebyshev polynomial [
25,
26] which is selected as activation function of the Chebyshev layer;
is the connective weight between hidden layer and Chebyshev layer in the
mth novel recurrent Chebyshev NN,
is the connective weight between the input layer and the Chebyshev layer in the
mth novel recurrent Chebyshev NN,
n is the number of neurons in the Chebyshev layer,
is the activation function, which is the Chebyshev polynomial function in the
mth novel recurrent Chebyshev NN,
is the
ith output node of input layer in the
mth novel recurrent Chebyshev NN,
is the
kth output to the node of hidden layer in the
mth novel recurrent Chebyshev NN, and
is the
jth output nod of Chebshev layer in the
mth novel recurrent Chebyshev NN. The first few Chebyshev polynomials are given by
,
and
. The higher order Chebyshev polynomials may be generated by the recursive formula given by
.
4.1.3. Third Layer: Function Layer k
In the third layer, the input signals and the output signals for each node
kth in the
mth novel recurrent Chebyshev NN can be expressed as:
where
is the
jth output node of Chebyshev layer in the
mth novel recurrent Chebyshev NN,
is the activation function, which is the linear function in the
mth novel recurrent Chebyshev NN,
is the
kth output to the node of hidden layer in the
mth novel recurrent Chebyshev NN,
is the number of neurons in the hidden layer, and
is the self-connecting feedback gain of function layer.
4.1.4. Fourth Layer: output Layer o
In the fourth layer, the input signals and the output signals for node
oth in the
mth novel recurrent Chebyshev NN are expressed as:
where
is the connective weights between the function layer and the output layer in the
mth novel recurrent Chebyshev NN (
i.e., the output action intensity of the
oth output associated with the
jth node in the
mth novel recurrent Chebyshev NN), and
is the
jth output node of Chebyshev layer in the
mth novel recurrent Chebyshev NN. The single node
oth in this layer is indicated as summation
. The output in the
mth novel recurrent Chebyshev NN can be can be expressed as:
The output values of the two sets of four-layer novel recurrent Chebyshev NNs can be rewritten as for the AC-DC converter and for the DC-AC converter. Two sets of vectors and are the adjustable parameters between the function layer and the output layer in the two sets of four-layer novel recurrent Chebyshev NNs. Two sets of vectors and are the inputs vectors of the output layer in the two sets of four-layer novel recurrent Chebyshev NNs, in which is determined by the selected Chebyshev polynominal function and .
4.2. Controller Design
The novel recurrent Chebyshev NN controller is designed to estimate the ideal controller in Equation (16). By the universal approximation theorem [
36], there exists the ideal neural controller
such that
where
is a minimum approximation error and
is the ideal parameter vector of
. The approximation error
is assumed to be bounded by a positive constant
(
i.e.,
). This approximation error bound
is generally unobtainable in practical applications, so that it will be estimated in the following derivations. Moreover, the ideal recurrent Chebyshev NN controller cannot be obtained, so that an on-line estimation novel recurrent Chebyshev NN controller is defined as:
where
is an estimate of the ideal parameter vector
. Define the estimation error
as:
where
. Define the error tracking index as:
Differentiating both sides of Equation (23) with respect to time yields
Then, the error (19) can be rewritten as:
To relax the requirement of the uncertain bound
, the bound estimation mechanism is developed to observe the bound of the approximation error. Define the estimation error of the bound:
where
is the estimation of uncertain bound. To guarantee the stability of the adaptive novel recurrent Chebyshev NN control scheme, the Lyapunov function candidate is defined as:
where
is a constant learning rate, and
is a variable learning rate, which will be discussed in the following subsection to speed up the convergence of novel recurrent Chebyshev NN controller parameter. Differentiating Equation (32) with respect to time and using Equation (30), we get:
For achieving
, the adaptive laws and the compensated controller are chosen as:
where
is the sign function. Substituting Equations (34)–(36) into (33), then Equation (33) can be rewritten as:
Since
is the negative semidefinite, that is
, it implies that
,
and
are bounded. Let function
, and integrate
with respect to time, then it is obtained that:
Because
is bounded, and
is nonincreasing and bounded, the following result can be obtained:
Moreover, since
is bounded, by Barbalat’s Lemma [
37]
. That is,
as
. As a result, the stability of the proposed recurrent Chebyshev NN control system can be guaranteed.
4.3. Convergence Analyses
The adaptive law shown in Equation (35) calls for a proper choice of the learning rate. In order to train the novel recurrent Chebyshev NN efficiently, an ideal learning rate will be derived to achieve the fast convergence of output tracking error. First, the adaptive law shown in Equation (35) can be rewritten as:
The central part of the training algorithm for the novel recurrent Chebyshev NN concerns how to obtain recursively a gradient vector in which each element in the training algorithm is defined as the derivative of an energy function with respect to a parameter of the network. In order to describe the online training algorithm of the novel recurrent Chebyshev NN, a cost function is defined as:
According to the gradient descent method, the adaptive law of the weight also can be represented as:
Comparing Equation (40) with (42), yields
. The propagated error term can be calculation as:
The connective weight
between context layer and hidden layer can be updated as:
where
can be calculate from Equation (21).
The connective weight
between hidden layer and input layer can be updated as:
where
can be calculate from Equation (21).
The recurrent weight
between output layer and input layer can be updated as:
where
can be calculate from Equation (20). Then, the convergence analysis in the following theorem is to derive specific learning rate to assure convergence of the output tracking error.
Theorem 1. Let be the learning rate of the recurrent Chebyshev NN weight, and let be defined as , where and is the Euclidean norm in . Then, the convergence of the output tracking error is guaranteed if the learning rate is chosen as: Moreover, the ideal learning rate which achieves the fast convergence can be obtained as: Proof. Since
then, a discrete-type Lyapunov function is selected as:
the change in the Lyapunov function is obtained by:
the error difference can be represented by [
18].
where
is the output error change and
represents change of the weight. Using Equations (40)–(42) and (49), then Equation (52) can be obtained:
Thus
from Equation (51) to (55),
can be rewritten as:
If
is chosen as
, then the Lyapunov stability of
and
is guaranteed so that the output tracking error will converge to zero as
. This completes the proof of the theorem. Moreover, the ideal learning rate which achieves the fast convergence is corresponding to
,
i.e.,
which comes from the derivative of Equation (56) with respect to
and equals to zero. This shows an interesting result for the ideal learning rate which can be online tuned at each instant. In summary, the on-line learning algorithm of the novel recurrent Chebyshev NN controller is based on the adaptive law Equation (35) for the weight adjustment with the ideal learning rate in Equation (48).
5. Experimental Results
The configure of the PM synchronous generator system shown in
Figure 3 consists of two sets of field-oriented institutions, two sets of current control loops, two sets of SPWM control circuits, two sets of interlock and isolated circuits, two sets of isolated-gate bipolar transistor (IGBT) power modules (
i.e., the AC-DC converter and the DC-AC converter), and two sets of recurrent Chebyshev NN control systems. The output DC voltage of the AC-DC converter, which is provided by WT driving PM synchronous generator system, is controlled by the novel recurrent Chebyshev NN control system # 1. Then, the output AC 60 Hz line voltage of the DC-AC conveter controlled by the novel recurrent Chebyshev NN control system #2 is provided to smart grid power system. The specification of PM synchronous generator is a three-phase four-pole 1.5 kW 220 V 10 A 2000 rpm type for experimental test in this paper. The electric parameters of the drive model at the nominal condition are
,
,
. Both output voltages of the AC-DC converter and the DC-AC converter, which are controlled by two sets of novel recurrent Chebyshev NN control systems, are implemented by using two sets of TMS320C32 DSP (Spinel Tech. Co., Taipei, Taiwan) control boards and interface cards.
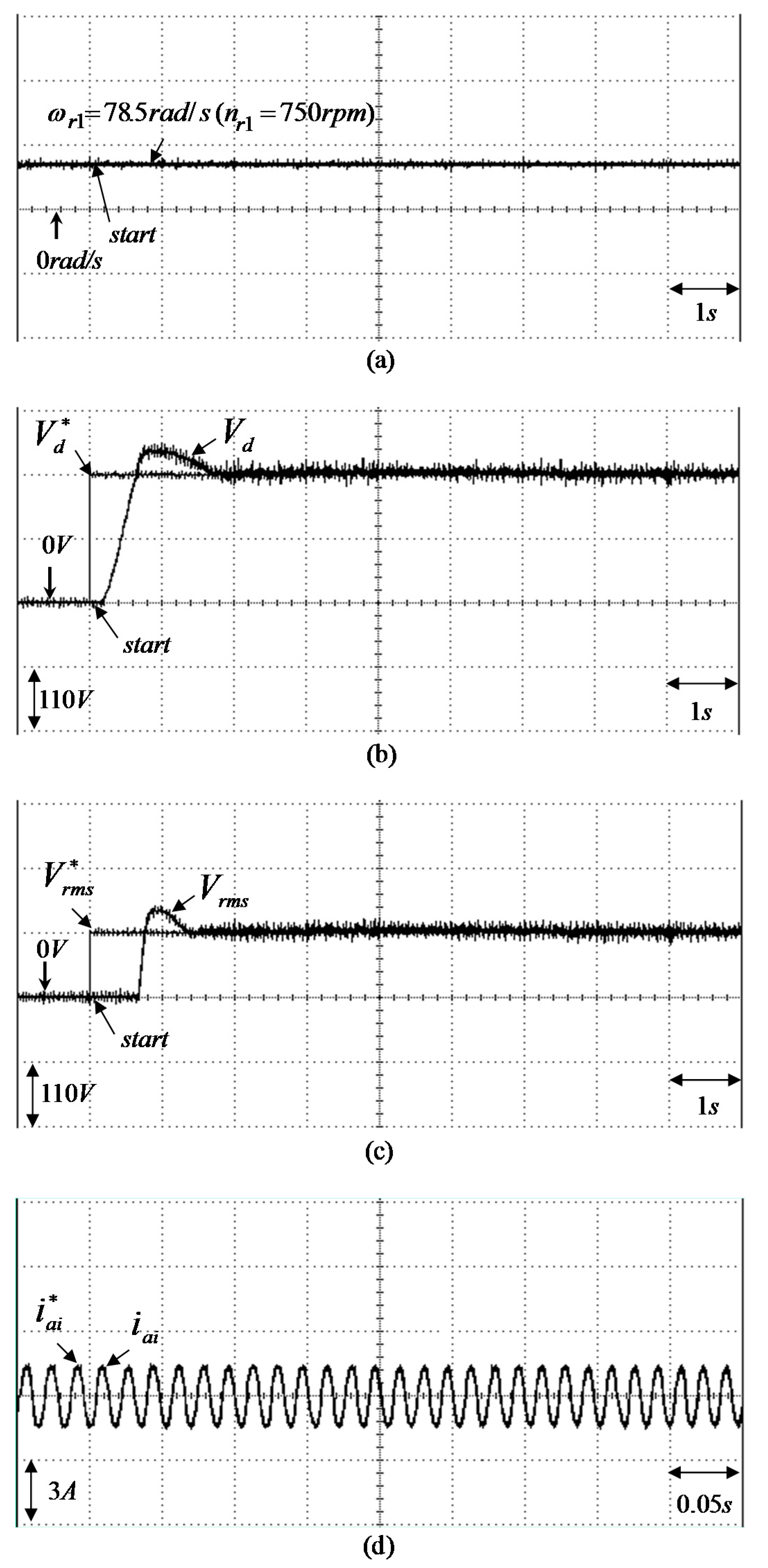
The voltage and power control of the PM synchronous generator system, which controlled by using two sets of novel recurrent Chebyshev NN control systems, are realized by two sets of TMS320C32 DSP control systems. For implementing two sets of current-controlled PWM AC-DC converter and DC-AC converter, two sets of IGBT power modules are adopted six pices of GBSM 100GB-120DLC manufactured by Eupec Co. (Warstein, Germany). The switching frequency of IGBT power modules is 15 kHz. The recurrent Chebyshev NN has 2, 3, 3, 1 nodes in the input layer, the Chebyshev layer, the function layer and the output layer, respectively. The parameters in the novel recurrent Chebyshev NN control system are chosen to achieve the best transient control performance in experimentation considering the requirement of stability. Usually, some heuristics can be used to roughly initialize the parameters of the novel recurrent Chebyshev NN for practical application. The effect due to the inaccurate selection of the initialized parameters can be retrieved by the online parameter training methodology. For simplicity, the all recurrent weights between the output layer and the input layer in the two sets of novel recurrent Chebyshev NNs are to set 1. Moreover, the connective weights between the hidden layer and the Chebyshev layer, the connective weights between the input layer and the Chebyshev layer, and the connective weights between the Chebyshev layer and the output layer in the two sets of novel recurrent Chebyshev NNs are initialized with random numbers. Furthermore, the normalized inputs and references have zero and unity, respectively. In addition, the network outputs should be converted back to the original units of the references. The parameters adjustment process remains continually active for the duration of the experimentation. To satisfy specification of the grid load and regulate of output voltage in the DC-AC converter controlled by the novel recurrent Chebyshev NN control system, the reference of DC bus voltage is selected as twice of the reference of output AC line voltage in the output end of the inverter. Since the maximum voltage of the output AC line voltage is 110 = 155 V. Consider the line voltage drop and switching devices (IGBT) of the inverter, the reference for is selected as 220 V. Therefore, the output voltage of the inverter controlled by the novel recurrent Chebyshev NN control system can be regulated as 110 V root-mean-square (RMS) voltage to satisfy specification of the three-phase load. Firstly, the rotor speed , the step desired DC bus voltage , the step desired root-mean-square AC 60 Hz line voltage under light load are set as 78.5 rad/s (750 rpm), 220 V and 110 V, respectively, Secondly, the rotor speed , the step desired DC bus voltage , the step desired root-mean-square AC 60 Hz line voltage under heavy load are set as 157 rad/s (), 220 V and 110 V, respectively. Both light load and heavy load patch powers as 121W and 242W, respectively. Some experimental results of the WT driving PM synchronous generator system using the two sets of PI controllers are demonstrated for the comparison of the control performance. Since the PM synchronous generator system is a nonlinear and time-varying system, the gains of the two sets of PI controllers for both the DC bus voltage adjustment and AC 60 Hz line voltage adjustment are obtained by trial and error to achieve steady state control performance. The control gains of the two sets of PI controllers are for the DC bus voltage adjustment and for the AC 60 Hz line voltage adjustment.
The experimental results of the WT driving PM synchronous generator system using two sets of PI controllers under light load (
i.e., Δ connection three-phase load of 100 Ω) for
=
(
=
) are shown in
Figure 6. The responses of the rotor speed
, the step desired DC bus voltage
and the measured DC bus voltage
in output end of the rectifier, the step desired root-mean-square AC 60 Hz line voltage
and the measured root-mean-square AC 60 Hz line voltage
in output end of the inverter, the steady-state desired phase current
and the measured phase current
in phase
ai of the DC-AC converter are shown in
Figure 6a–d, respectively.
The experimental results of the WT driving PM synchronous generator system using two sets of PI controllers under middle load (
i.e., Δ connection three-phase load of
) for
=
(
=
) are shown in
Figure 7. The responses of the rotor speed
, the step desired DC bus voltage
and the measured DC bus voltage
in output end of the rectifier, the step desired root-mean-square AC 60 Hz line voltage
and the measured root-mean-square AC 60 Hz line voltage
in output end of the inverter, the steady-state desired phase current
and the measured phase current
in phase
ai of the inverter are shown in
Figure 7a–d, respectively.
The experimental results of the WT driving PM synchronous generator system using two sets of PI controllers under heavy load (
i.e., Δ connection three-phase load of
) for
=
(
=
) are shown in
Figure 8. The responses of the rotor speed
, the step desired DC bus voltage
and the measured DC bus voltage
in output end of the rectifier, the step desired root-mean-square AC 60 Hz line voltage
and the measured root-mean-square AC 60 Hz line voltage
in output end of the inverter, the steady-state desired phase current
and the measured phase current
in phase
ai of the inverter are shown in
Figure 8a–d, respectively.
From the experimental results, sluggish DC bus voltage and AC 60 Hz line voltage tracking are obtained for the PI controlled WT driving PM synchronous generator system due to the weak robustness of the linear controller.
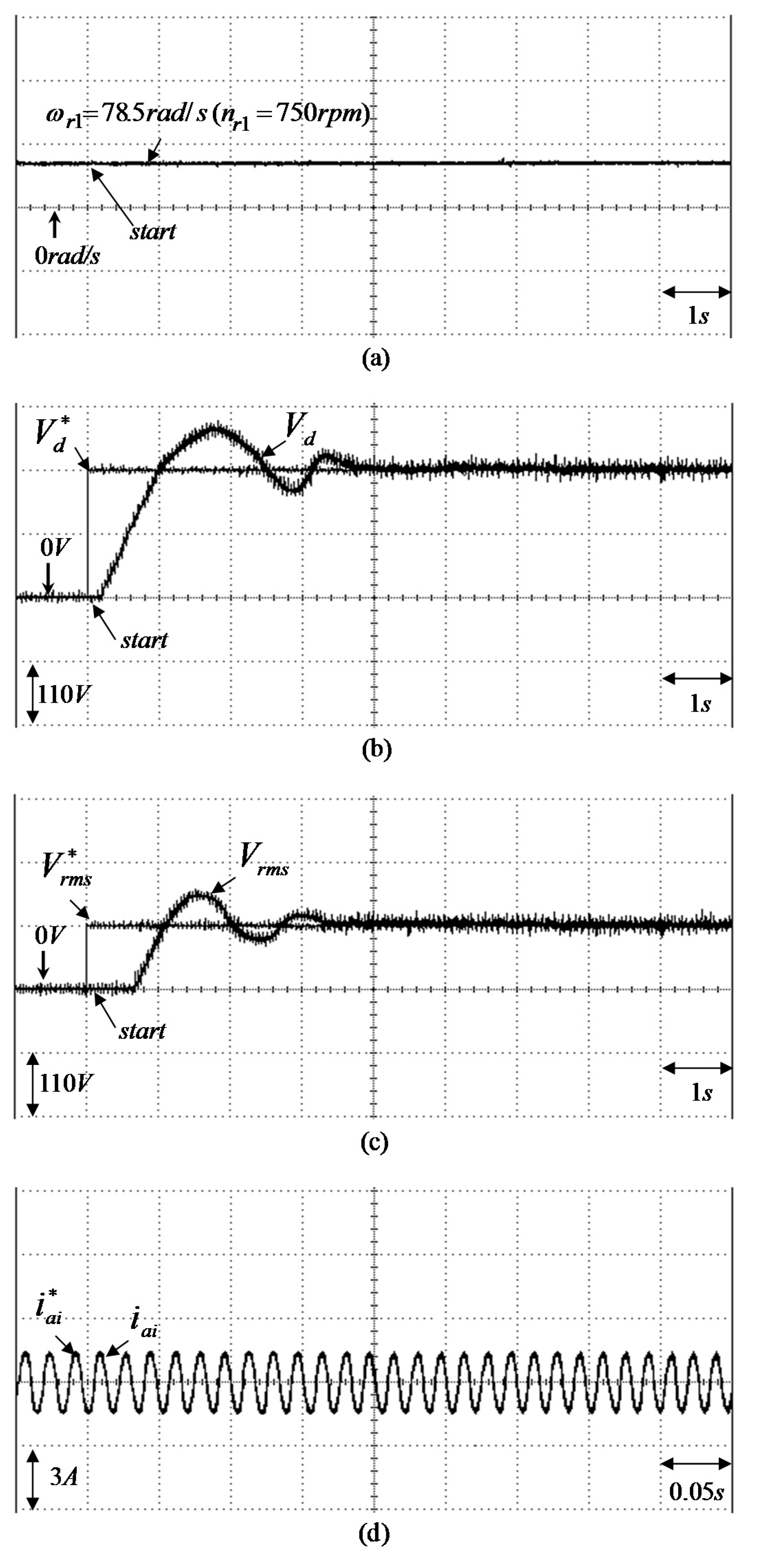
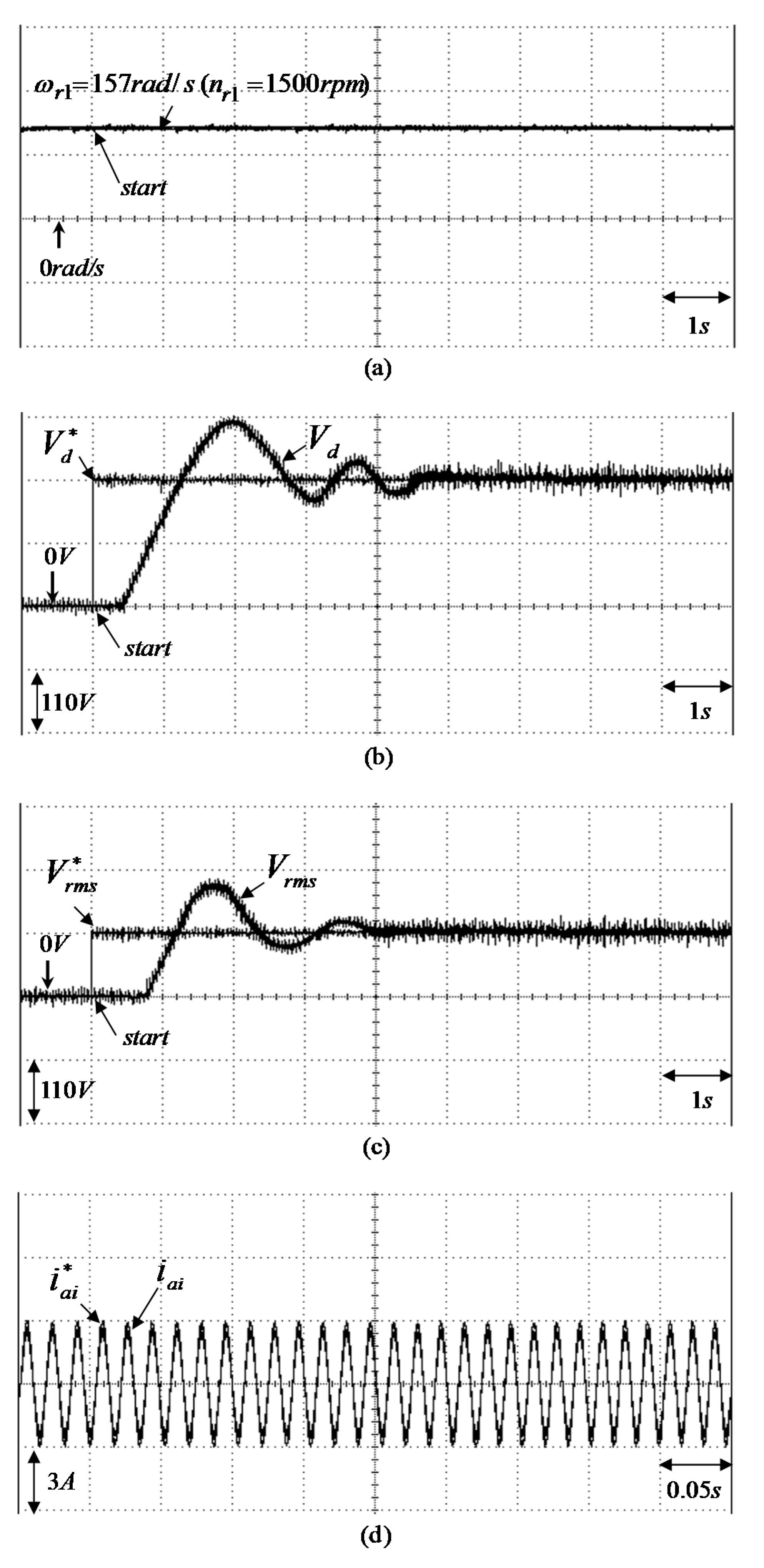
Some experimental results of the WT driving PM synchronous generator system using the two sets of novel recurrent Chebyshev NN control systems are discussed. The experimental results of the WT driving PM synchronous generator system using the novel recurrent Chebyshev NN control system under light load
(i.e., Δ connection three-phase load of
) for
=
(
=
) are shown in
Figure 9. The responses of the rotor speed
, the step desired DC bus voltage
and the measured DC bus voltage
in output end of the rectifier, the step desired root-mean-square AC 60 Hz line voltage
and the measured root-mean-square AC 60 Hz line voltage
in output end of the inverter, the steady-state desired phase current
and the measured phase current
in phase
ai of the inverter are shown in
Figure 9a–d, respectively.
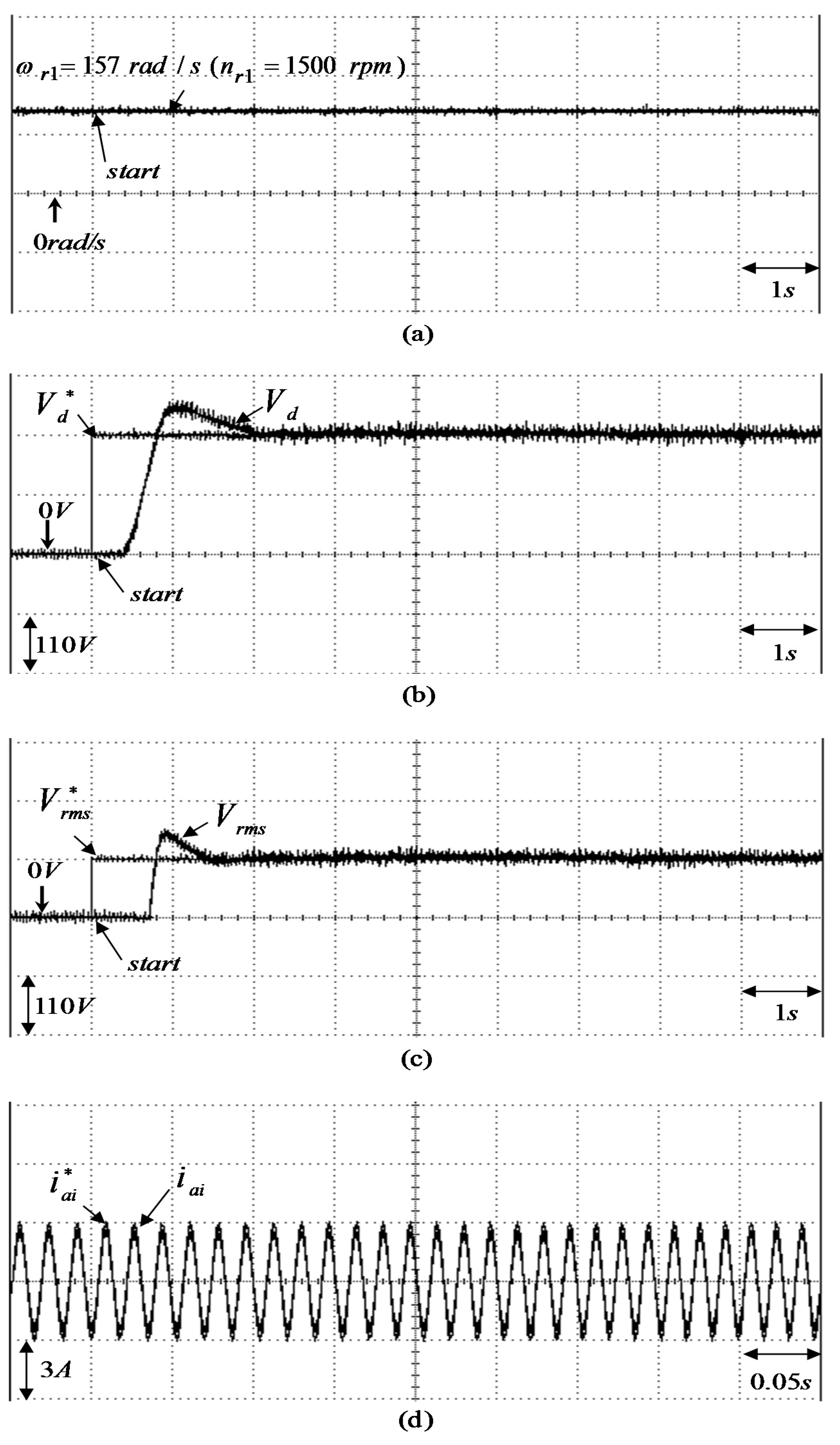
The experimental results of the WT driving PM synchronous generator system using the two sets of novel recurrent Chebyshev NN control system under middle load (
i.e., Δ connection three-phase load of
) for
=
(
=
) are shown in
Figure 10. The responses of the rotor speed
, the step desired DC bus voltage
and the measured DC bus voltage
in output end of the rectifier, the step desired root-mean-square AC 60 Hz line voltage
and the measured root-mean-square AC 60 Hz line voltage
in output end of the inverter, the steady-state desired phase current
and the measured phase current
in phase
ai of the DC-AC converter are shown in
Figure 10a–d, respectively.
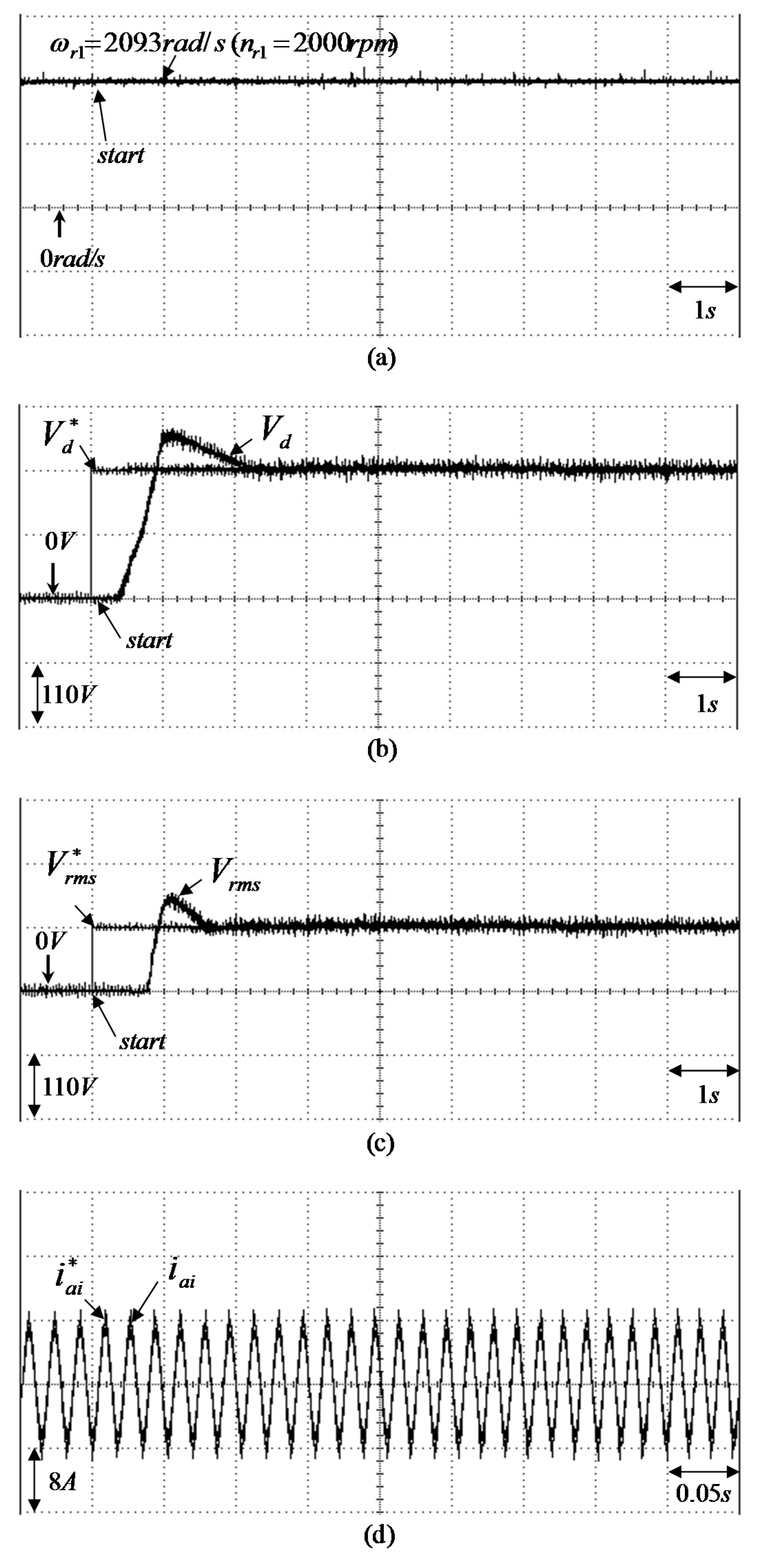
The experimental results of the WT driving PM synchronous generator system using the two sets of novel recurrent Chebyshev NN control system under heavy load (
i.e., Δ connection three-phase load of
) for
=
(
=
) are shown in
Figure 11. The responses of the rotor speed
, the step desired DC bus voltage
and the measured DC bus voltage
in output end of the rectifier, the step desired root-mean-square AC 60 Hz line voltage
and the measured root-mean-square AC 60 Hz line voltage
in output end of the inverter, the steady-state desired phase current
and the measured phase current
in phase
ai of the DC-AC converter are shown in
Figure 11a–d, respectively.
Moreover, compared with the PI control method, the proposed novel recurrent Chebyshev NN control method has a superior tracking and a good improvement owing to on-line training of the novel recurrent Chebyshev NN.
Since this study is dealing with an isolated system with maximum power control, the block diagram of the DC bus power with maximum power control is also the same as
Figure 3 except
is replaced by
and
is replaced by
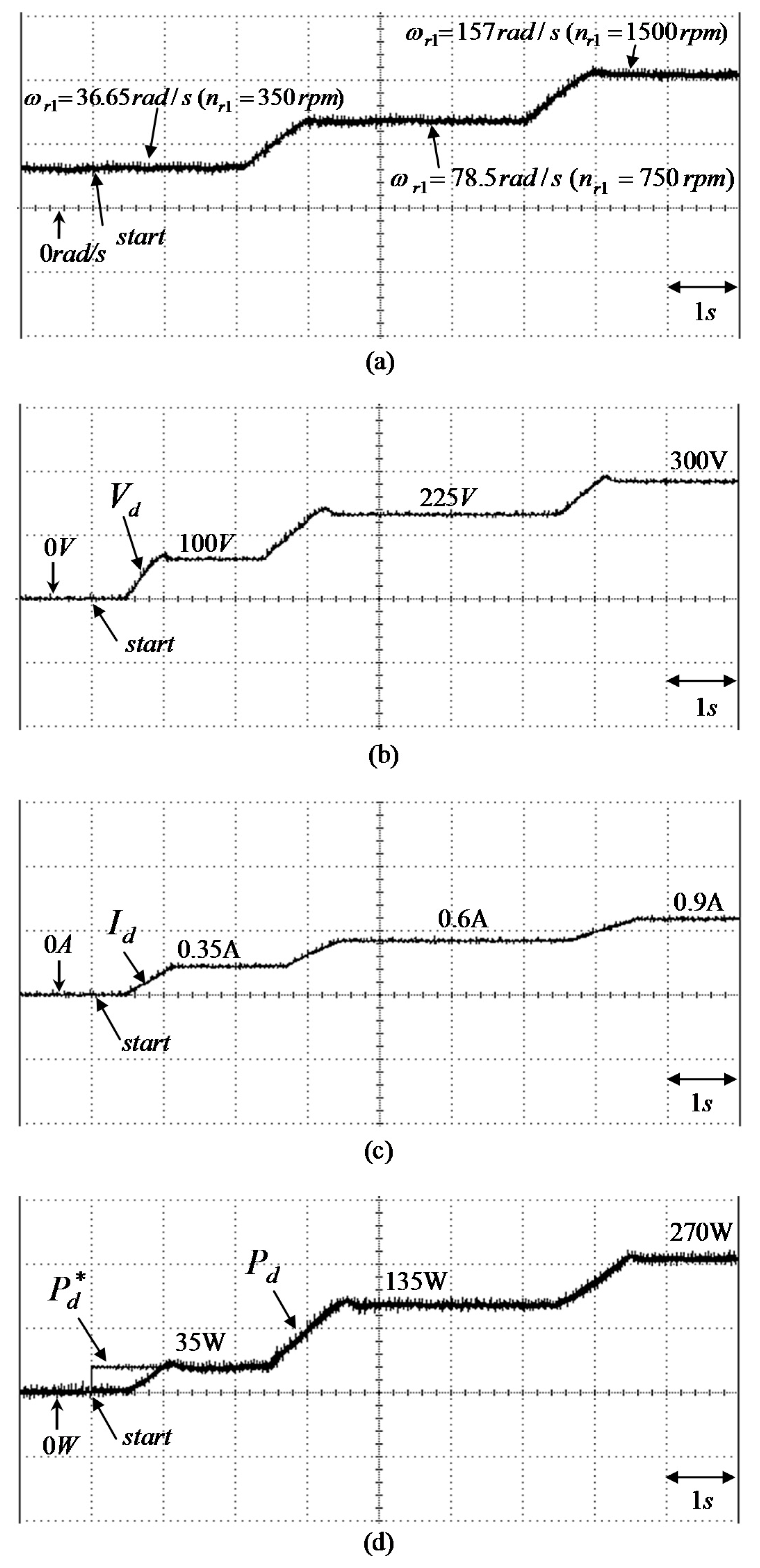
. The experimental results for the varying wind turbine speed with maximum DC bus power of the PM synchronous generator system are provided. The experimental results of the novel recurrent Chebyshev NN control system controlled PM synchronous generator system at the condition of step changes of rotor speed,
i.e., 350, 750 and 1500 rpm, for the command tracking of are shown in
Figure 12. The responses of the rotor speed
(
), the measured DC bus voltage
, the measured DC bus current
, the reference DC bus power
and DC bus power
are shown in
Figure 12a–d, respectively. From the experimental results, favorable DC bus power tracking response can be achieved by using the novel recurrent Chebyshev NN control system.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











