
New Scheme for Seamless Operation for Stand-Alone Power Systems


Abstract
:1. Introduction
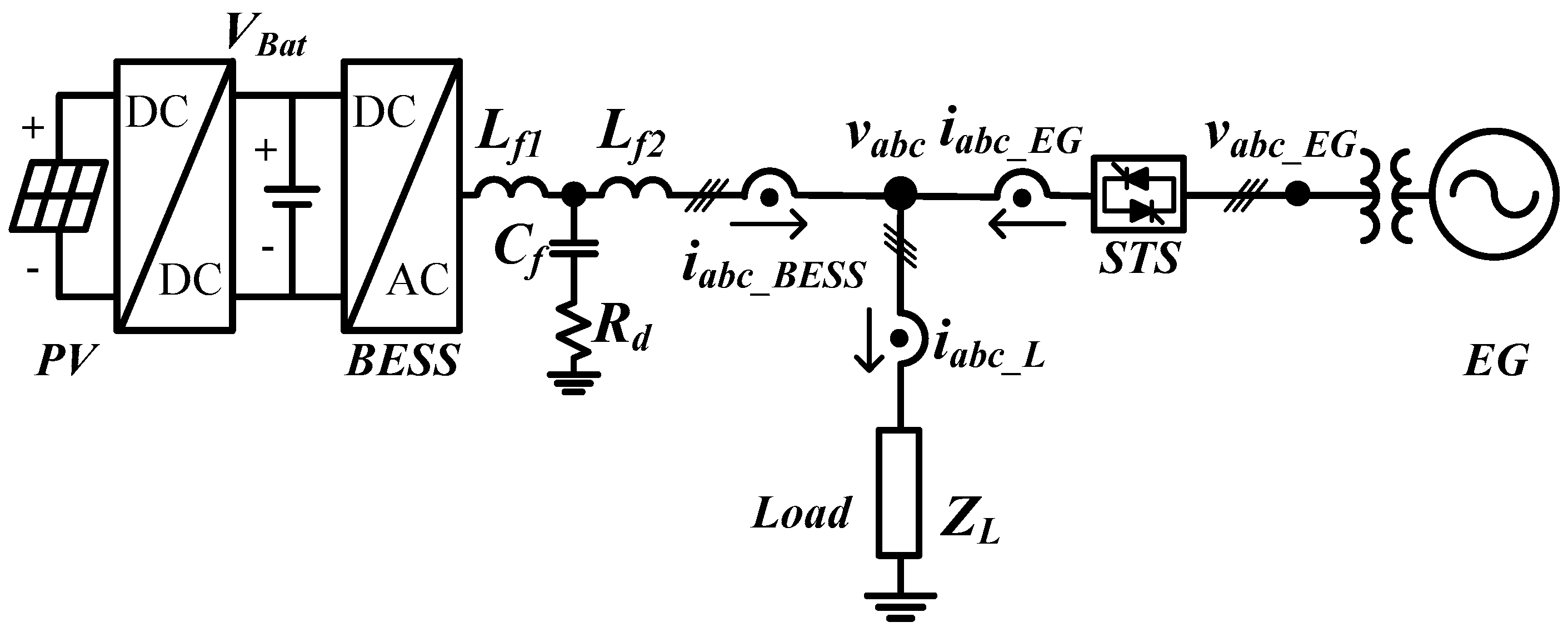
2. System Configuration and Control Scheme
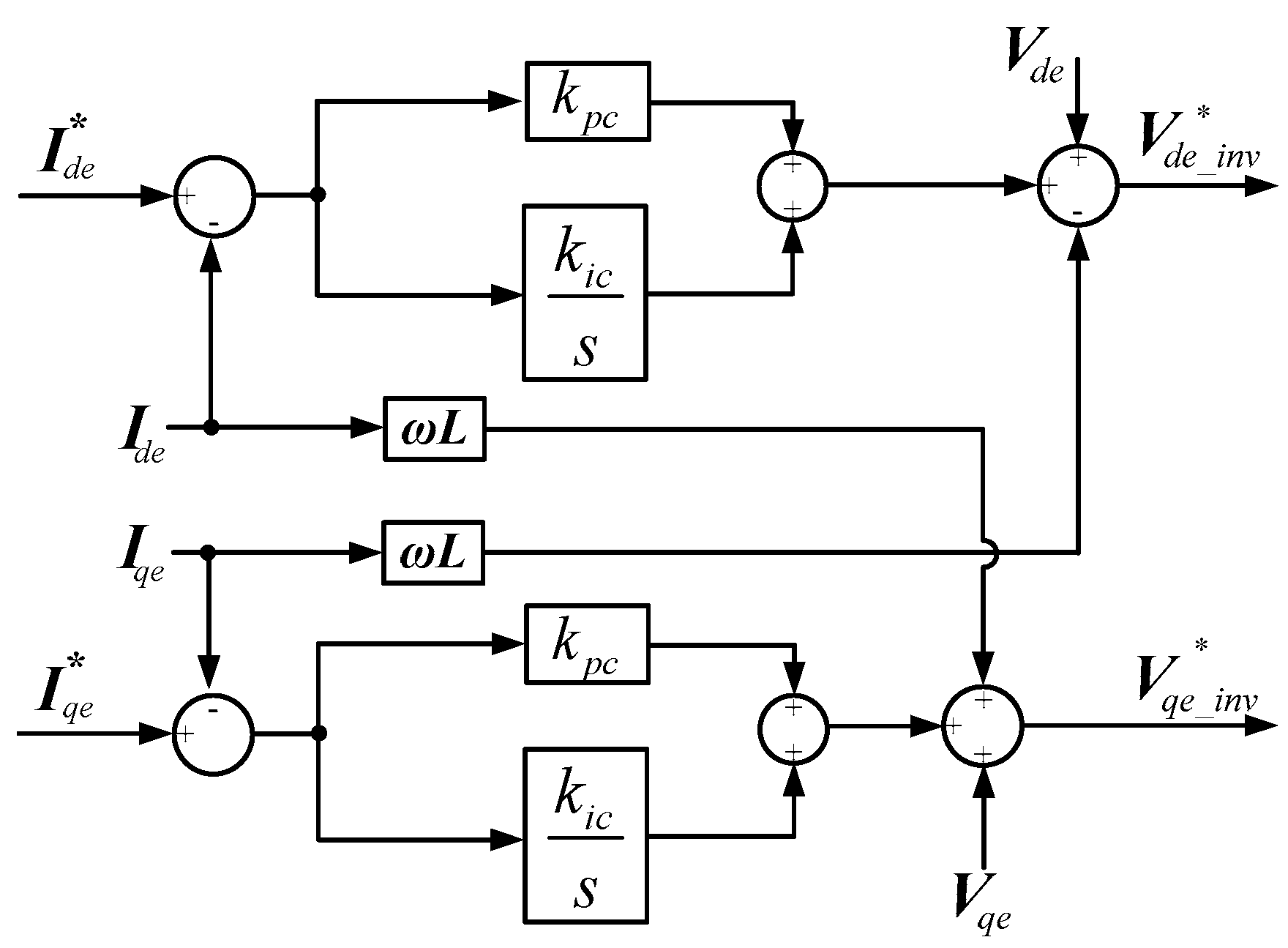
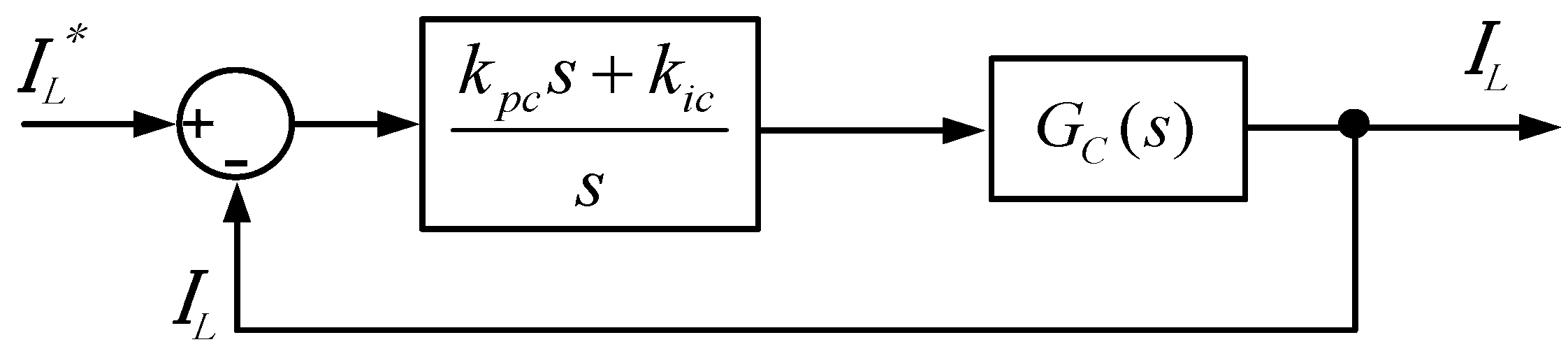
2.1. Current Control during Parallel Operation
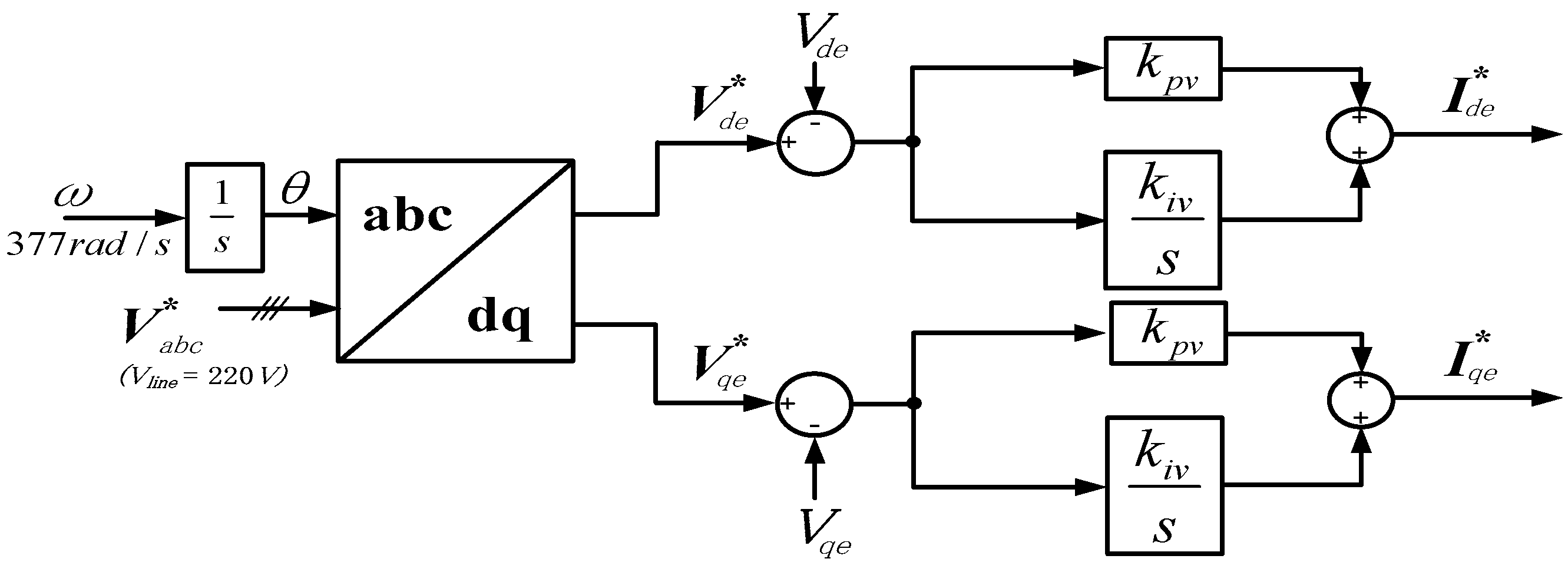
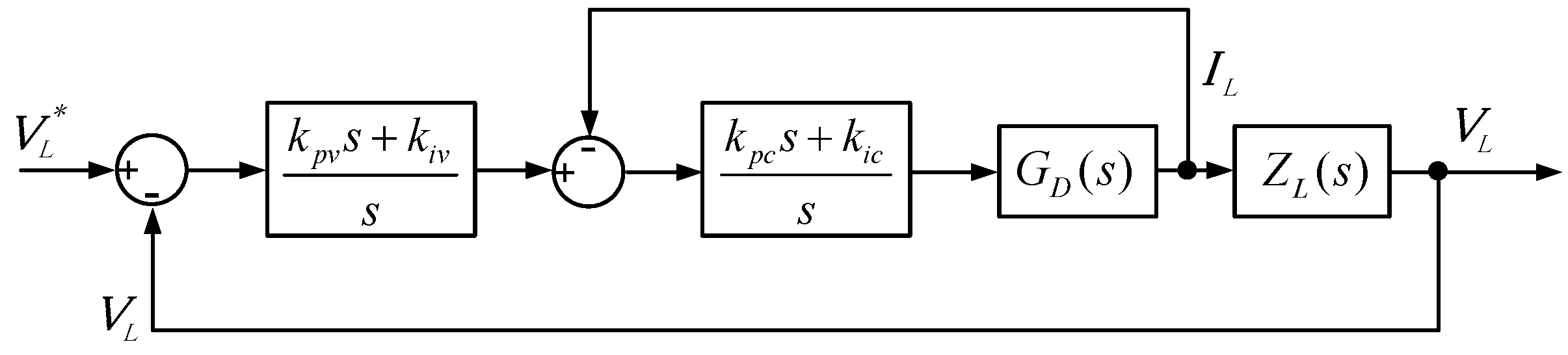
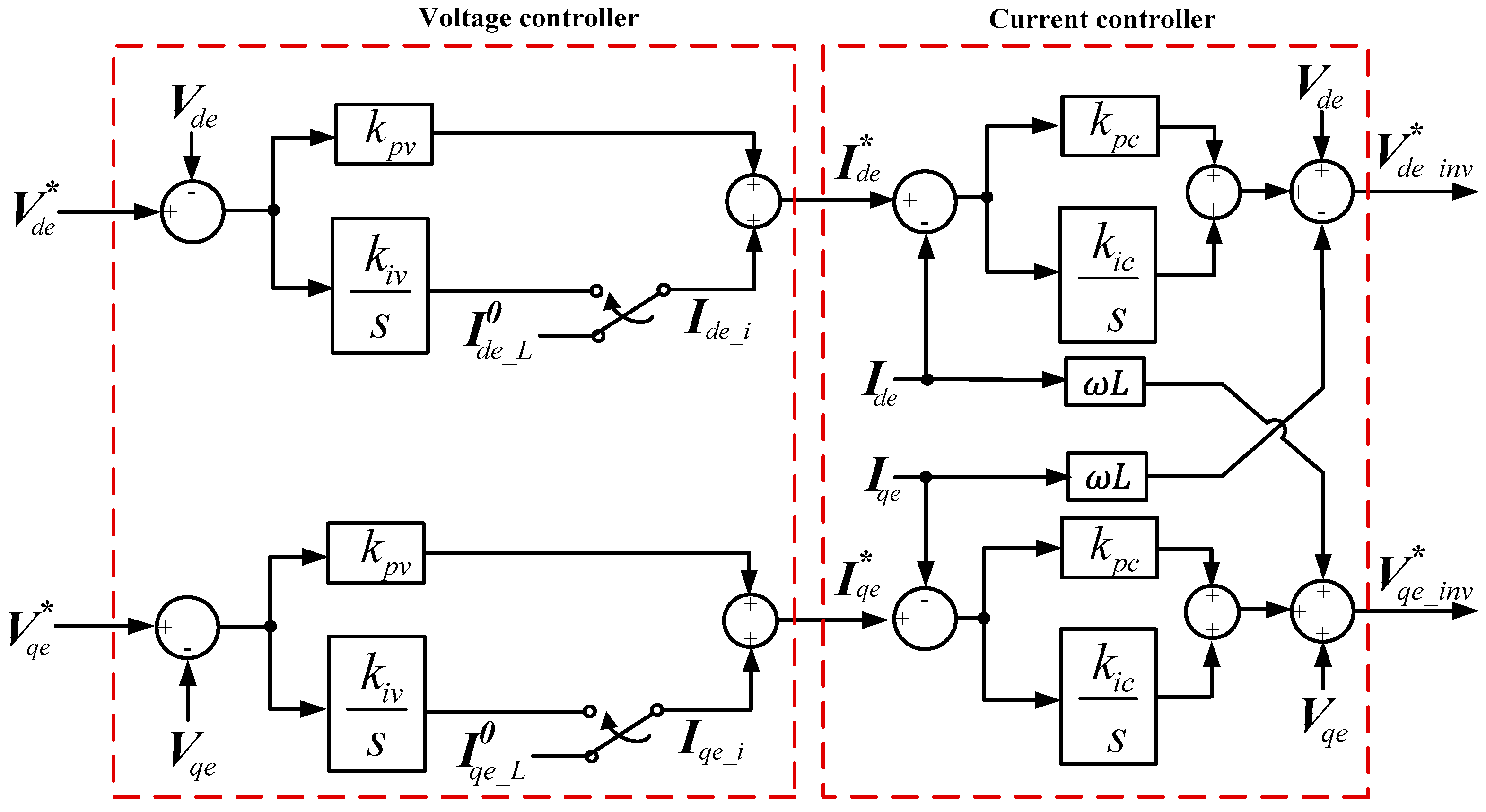
2.2. Voltage Control during Separate Operation
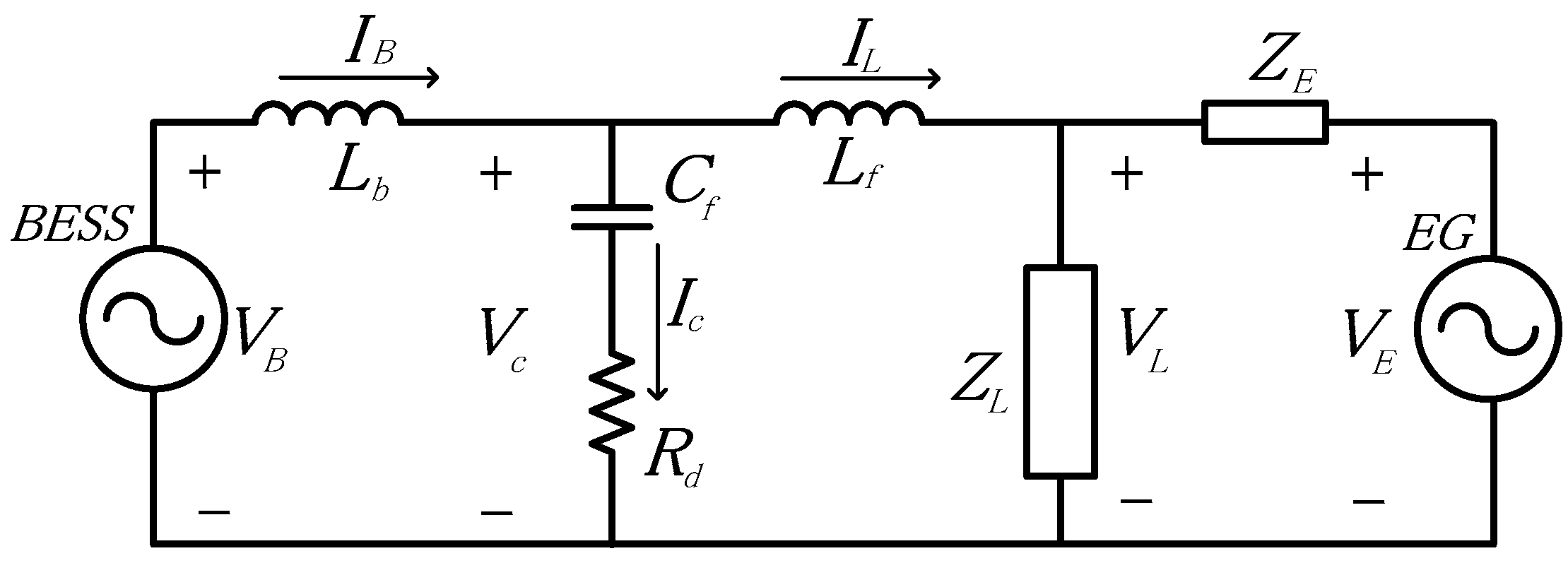
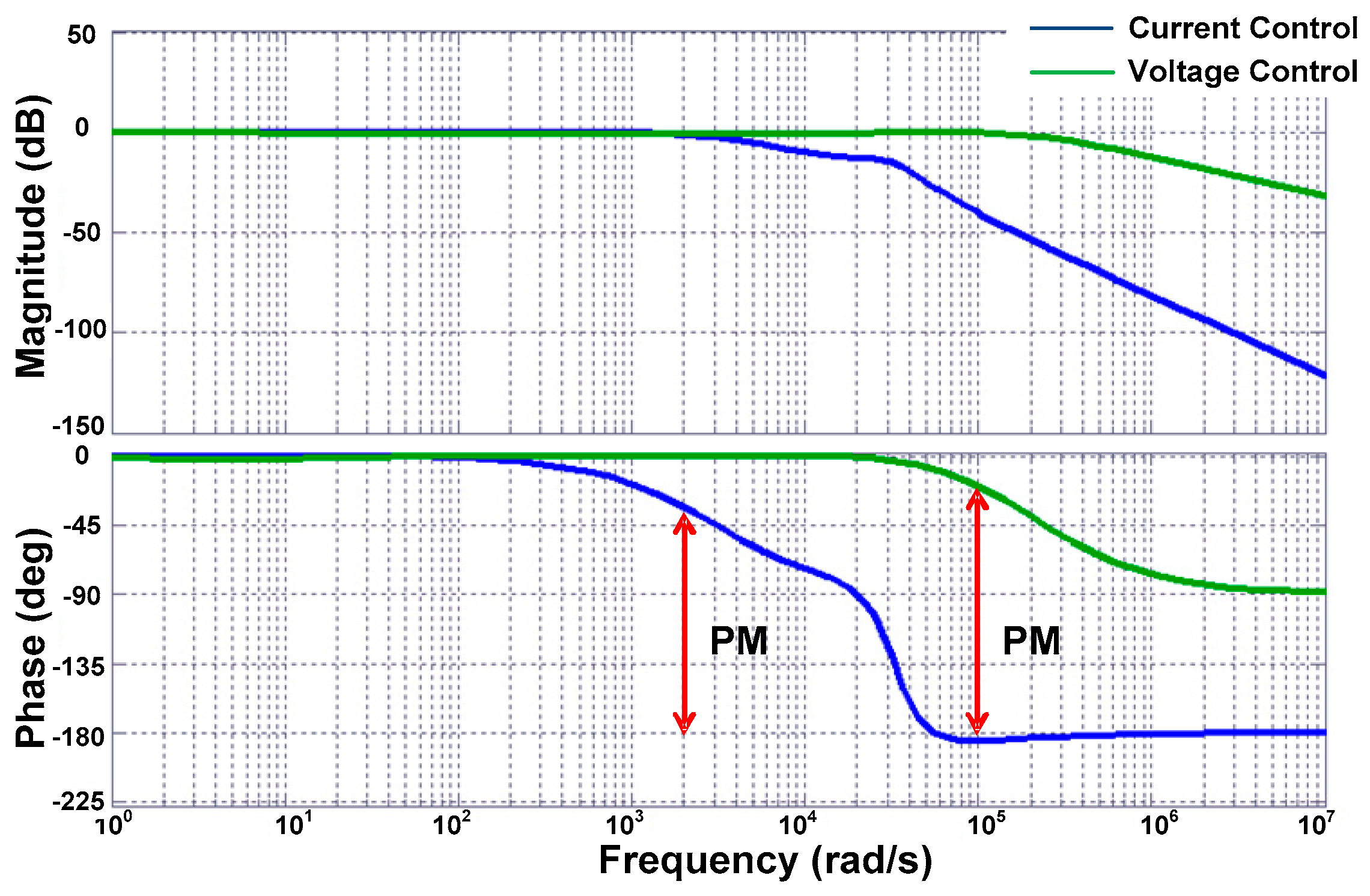
3. Operation Stability Analysis
- , BESS output voltage; , BESS output current; , BESS inverter reactor; , Filter capacitor voltage; , Filter capacitor current; , Filter capacitor; , Damping resistor; , Filter reactor; , Load voltage; , Load current; , Load impedance; , Engine generator voltage; , Engine generator impedance.
4. Proposed Seamless Operation
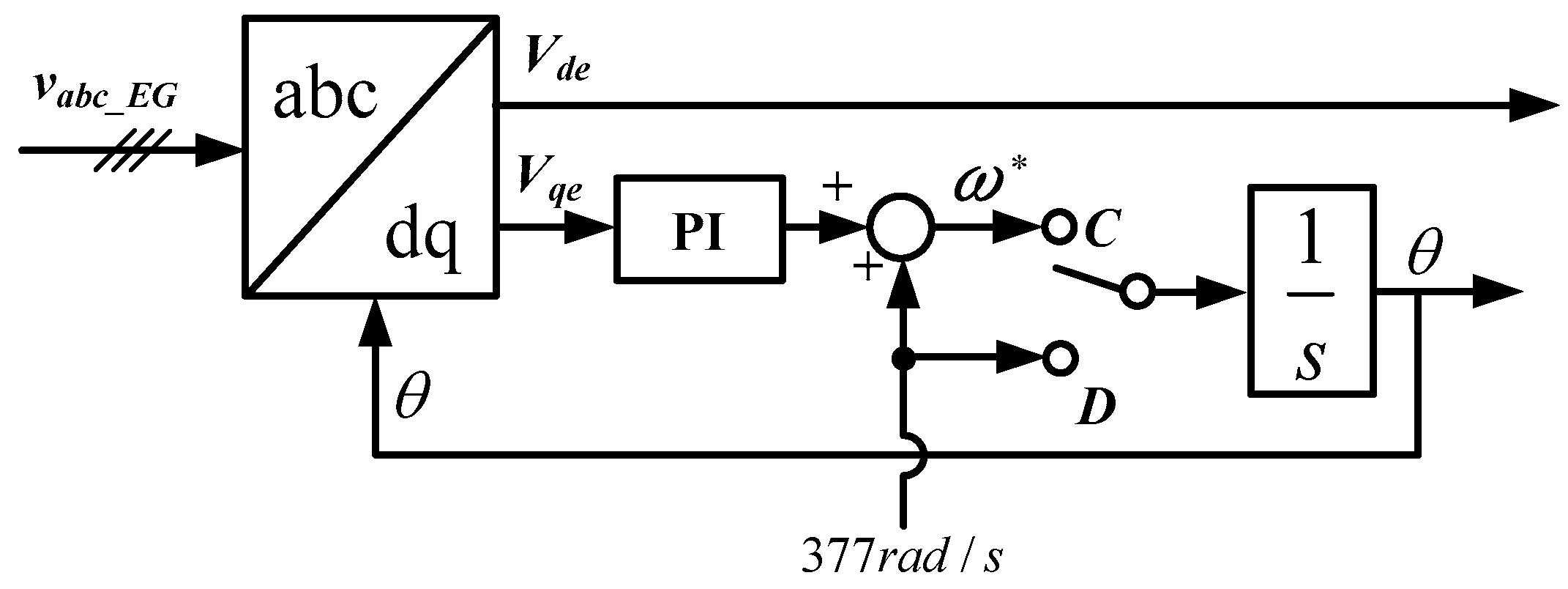
4.1. Mode Change into Separate Operation
4.2. Mode Change into Connected Operation
5. Simulation and Analysis
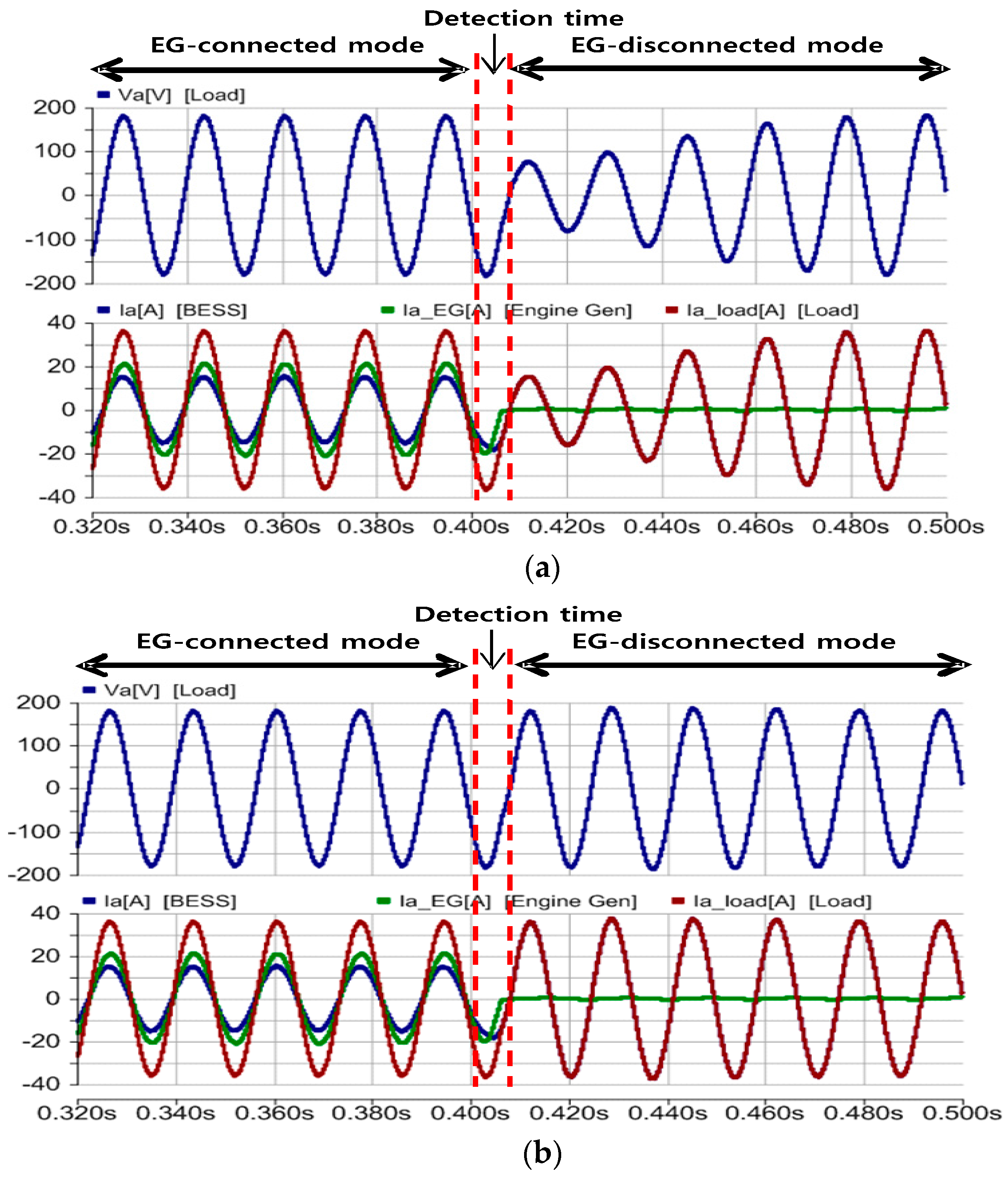
5.1. Mode Change into Separate Operation
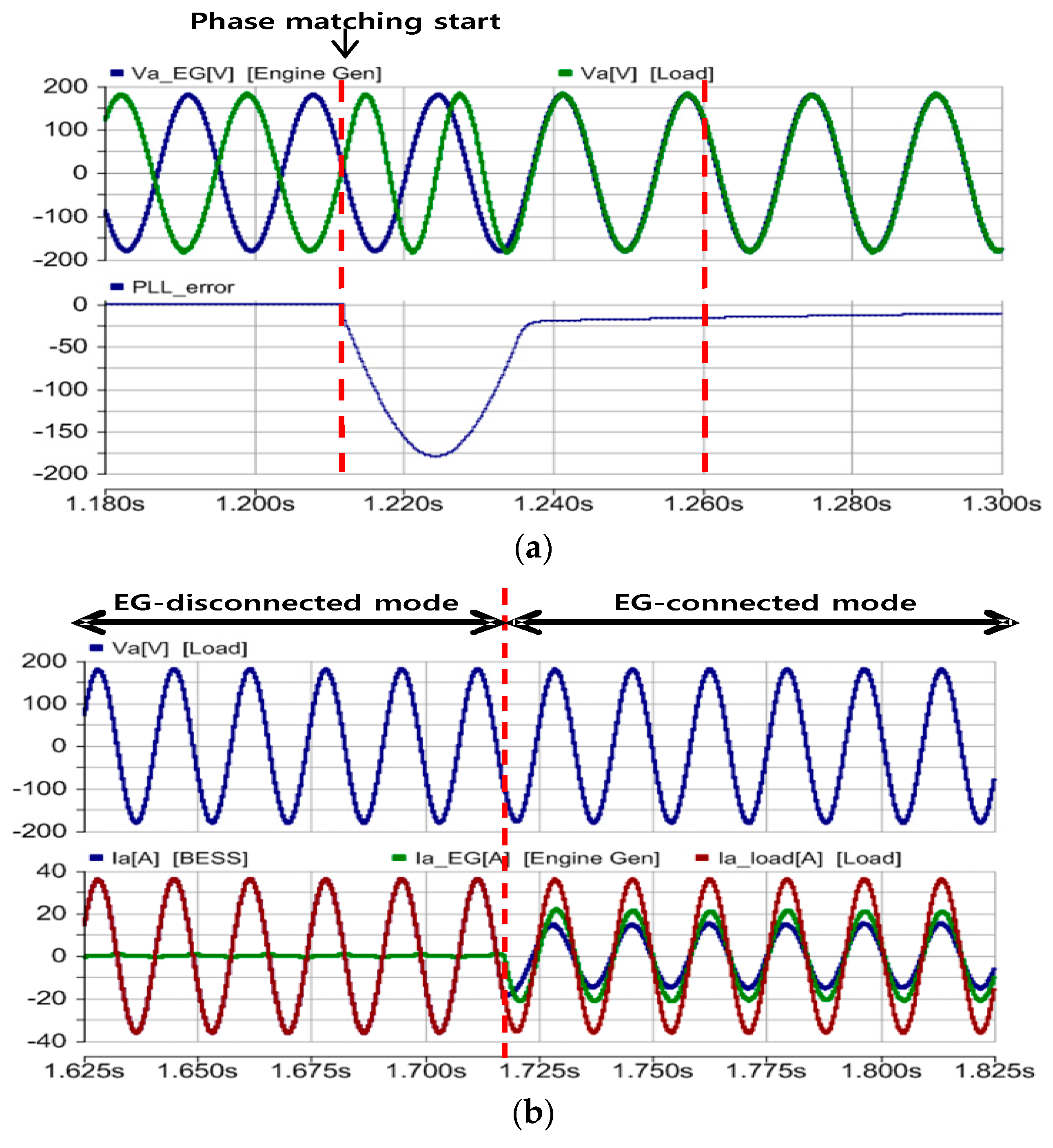
5.2. Mode Change into Reconnected Operation
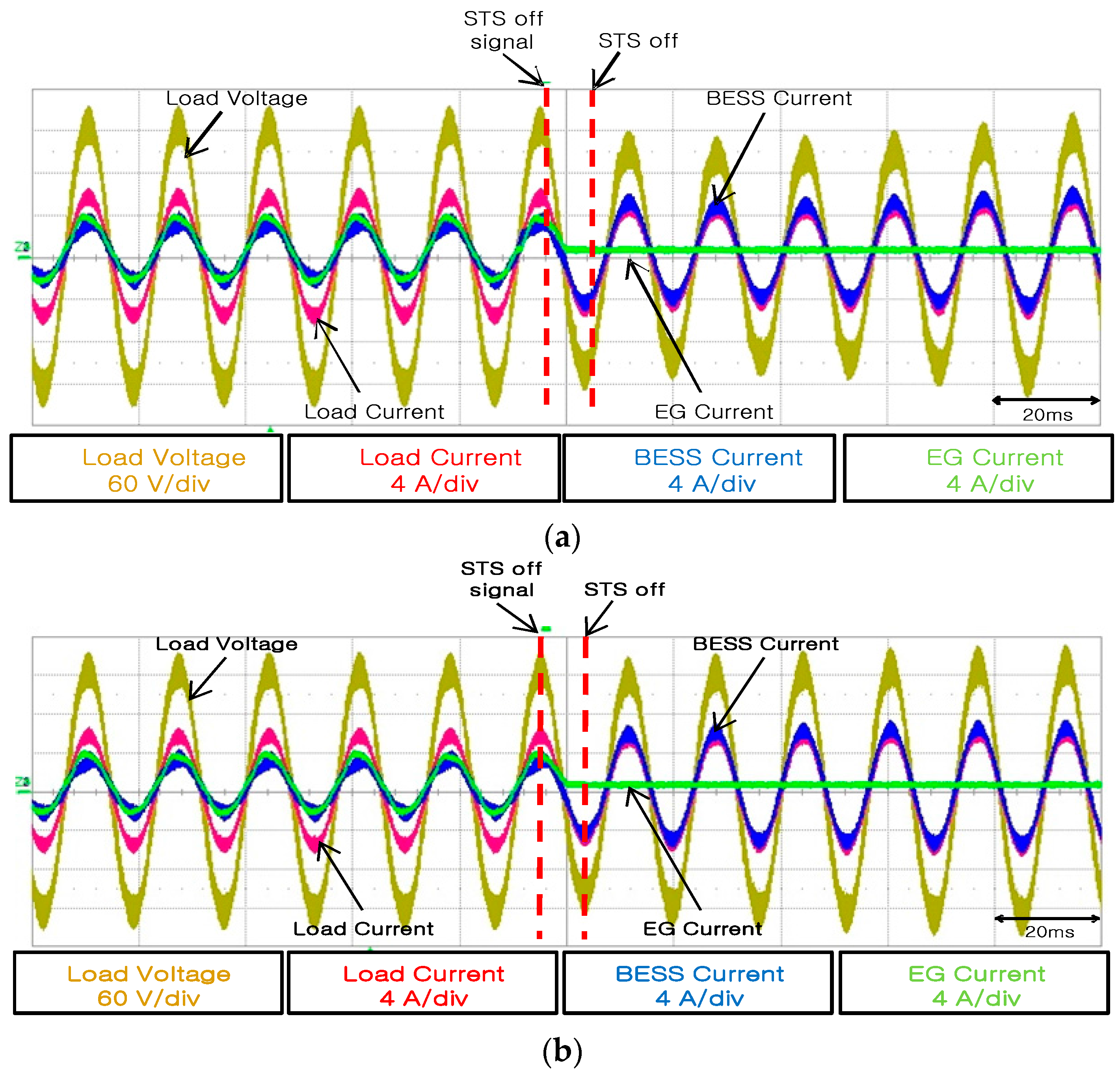
6. Hardware Experiment
6.1. Mode Change into Separate Operation
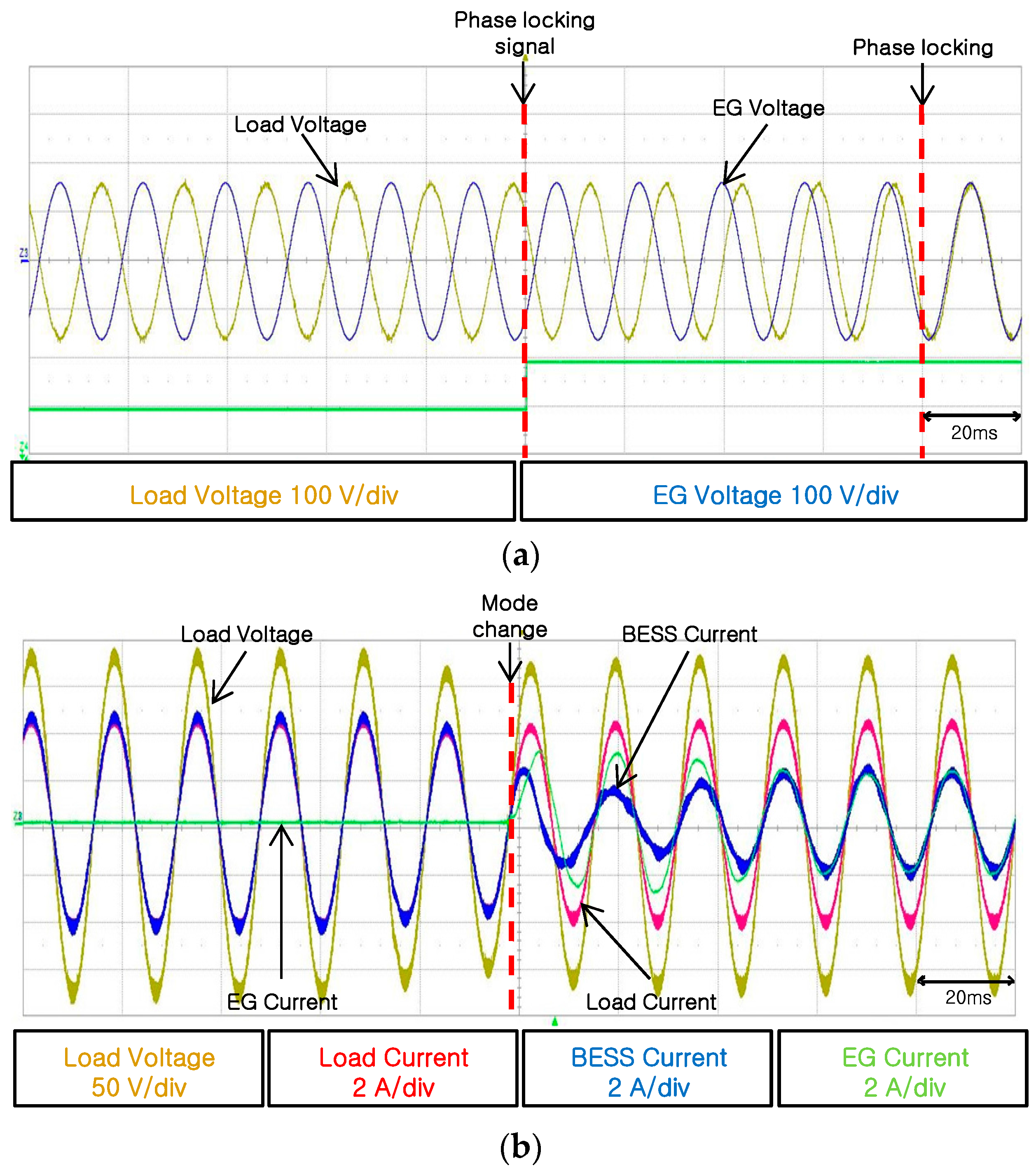
6.2. Mode Change into Connected Operation
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Parlak, K.S.; Ozdemir, M.; Aydemir, M.T. Active and reactive power sharing and frequency restoration in a distributed power system consisting of two UPS units. Electr. Power Energy Syst. 2009, 31, 220–226. [Google Scholar] [CrossRef]
- Meegahapola, L.; Robinson, D.; Agalgaonkar, A.; Perera, S.; Ciufo, P. Microgrids of commercial buildings: Strategies to manage mode transfer from grid connected to islanded mode. IEEE Trans. Smart Grid 2014, 5, 1337–1347. [Google Scholar] [CrossRef]
- Tran, T.V.; Chun, T.W.; Lee, H.H.; Kim, H.G.; Nho, E.C. PLL-Based Seamless Transfer Control between Grid-Connected and Islanding Modes in Grid-Connected Inverters. IEEE Trans. Power Electron. 2014, 29, 5218–5228. [Google Scholar] [CrossRef]
- Lin, M.C.; Lu, L.Y.; Chu, C.C. Implementations of seamless transfer and active islanding detections for microgrid applications. In Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), Taipei, Taiwan, 28–31 May 2013; pp. 1–6.
- Balaguer, I.J.; Lei, Q.; Yang, S.; Supatti, U.; Peng, F.Z. Control for Grid-Connected and Intentional Islanding Operations of Distributed Power Generation. IEEE Trans. Ind. Electron. 2011, 58, 147–157. [Google Scholar] [CrossRef]
- Kim, H.; Yu, T.; Choi, S. Indirect Current Control Algorithm for Utility Interactive Inverters in Distributed Generation Systems. IEEE Trans. Power Electron. 2008, 23, 1342–1347. [Google Scholar]
- Yoon, S.; Kwon, J.; Park, J.; Choi, S. Indirect current control for seamless transfer of three-phase utility interactive inverters. In Proceedings of the Twenty-Sixth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 6–11 March 2011; pp. 625–632.
- Yoon, S.; Oh, H.; Choi, S. Controller Design and Implementation of Indirect Current Control Based Utility-Interactive Inverter System. IEEE Trans. Power Electron. 2013, 28, 26–30. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, J. Indirect current control based seamless transfer of three-phase inverter in distributed generation. IEEE Trans. Smart Grid 2014, 29, 3368–3383. [Google Scholar] [CrossRef]
- Yao, Z.; Xiao, L.; Yan, Y. Seamless Transfer of Single-Phase Grid-Interactive Inverters between Grid-Connected and Stand-Alone Modes. IEEE Trans. Power Electron. 2010, 25, 1597–1603. [Google Scholar]
- Tirumala, R.; Mohan, N.; Henze, C. Seamless transfer of grid-connected PWM inverters between utility-interactive and stand-alone modes. In Proceedings of the Seventeenth Annual IEEE Applied Power Electronics Conference and Exposition, Dallas, TX, USA, 10–14 March 2002; Volume 2, pp. 1081–1086.
- Jung, S.; Bae, Y.; Choi, S.; Kim, H. A Low Cost Utility Interactive Inverter for Residential Fuel Cell Generation. IEEE Trans. Power Electron. 2007, 22, 2293–2298. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Hornik, T. Cascaded Current-Voltage Control to Improve the Power Quality for a Grid-Connected Inverter with a Local Load. IEEE Trans. Ind. Electron. 2013, 60, 1344–1355. [Google Scholar] [CrossRef]
- Mohamed, Y.A.R.I.; Radwan, A.A. Hierarchical Control System for Robust Microgrid Operation and Seamless Mode Transfer in Active Distribution Systems. IEEE Trans. Smart Grid 2011, 2, 352–362. [Google Scholar] [CrossRef]
- De Brabandere, K.; Bolsens, B.; van den Keybus, J.; Woyte, A.; Driesen, J.; Belmans, R. A Voltage and Frequency Droop Control Method for Parallel Inverters. IEEE Trans. Power Electron. 2007, 22, 1107–1115. [Google Scholar] [CrossRef]
- Lei, Q.; Yang, S.; Peng, F.Z. Multi-loop control algorithms for seamless transition of grid-connected inverter. In Proceedings of the Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 844–848.
- Hwang, T.S.; Park, S.Y. A seamless control strategy of a distributed generation inverter for the critical load safety under strict grid disturbances. IEEE Trans. Power Electron. 2013, 28, 4780–4790. [Google Scholar] [CrossRef]
- Ochs, D.S.; Mirafzal, B.; Sotoodeh, P. A Method of Seamless Transitions between Grid-Tied and Stand-Alone Modes of Operation for Utility-Interactive Three-Phase Inverters. IEEE Trans. Ind. Appl. 2014, 50, 1934–1941. [Google Scholar] [CrossRef]
- Liserre, M.; Blaabjerg, F.; Hansen, S. Design and control of an LCL-filter-based three-phase active rectifier. IEEE Trans. Ind. Appl. 2005, 41, 1281–1291. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Line-to-line voltage | 220 V |
| Battery voltage | 450 V |
| Switching frequency | 10 kHz |
| Filter inductor Lf1 | 3 mH |
| Filter inductor Lf2 | 0.2 mH |
| Filter capacitor Cf | 5 uF |
| Filter damping resistor Rd | 1 Ω |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.-J.; Lee, Y.-S.; Han, B.-M.; Yoon, Y.-D. New Scheme for Seamless Operation for Stand-Alone Power Systems. Energies 2016, 9, 457. https://doi.org/10.3390/en9060457
Kim H-J, Lee Y-S, Han B-M, Yoon Y-D. New Scheme for Seamless Operation for Stand-Alone Power Systems. Energies. 2016; 9(6):457. https://doi.org/10.3390/en9060457
Chicago/Turabian StyleKim, Hyun-Jun, Yoon-Seok Lee, Byung-Moon Han, and Young-Doo Yoon. 2016. "New Scheme for Seamless Operation for Stand-Alone Power Systems" Energies 9, no. 6: 457. https://doi.org/10.3390/en9060457
APA StyleKim, H. -J., Lee, Y. -S., Han, B. -M., & Yoon, Y. -D. (2016). New Scheme for Seamless Operation for Stand-Alone Power Systems. Energies, 9(6), 457. https://doi.org/10.3390/en9060457