1. Introduction
Recently, the magnetic coupling resonant WPT has found widespread applications, such as wireless sensors, electrical vehicles, and wireless household appliances [
1,
2,
3,
4]. This type of WPT system is non-radiative with ignorable radiative loss [
5], and often operates in the close-coupling condition where the transfer range is approximately equal to the diameter of the coils. Therefore, the transfer efficiency is not only high, but also remains nearly unchanged in a certain range even when the gap and misalignment varies [
1,
3,
6]. In order to satisfy the condition of close-coupling, the operating frequency is often set to several kHz–several MHz, and the quality-factor (
Q) should be as high as 200–2000 [
3,
5,
7,
8]. However, many factors, e.g., environmental changes, aging of the resonant tanks, and errors of individual components of mass production, may lead to variations of the operating frequency or circuit parameters including the inductances and the capacitances, which result in severe detuning in the high-
Q resonant tanks [
8,
9,
10]. To solve these problems, the automatic synchronous tuning method considering the frequency tuning and circuit parameter tuning, i.e., the tuning of the circuit parameters such as capacitances and inductances, should be investigated. The former makes the inverter operate in zero-current switching, and the latter ensures the resonant frequency of the transmitter (TX) and receiver (RX) is the same.
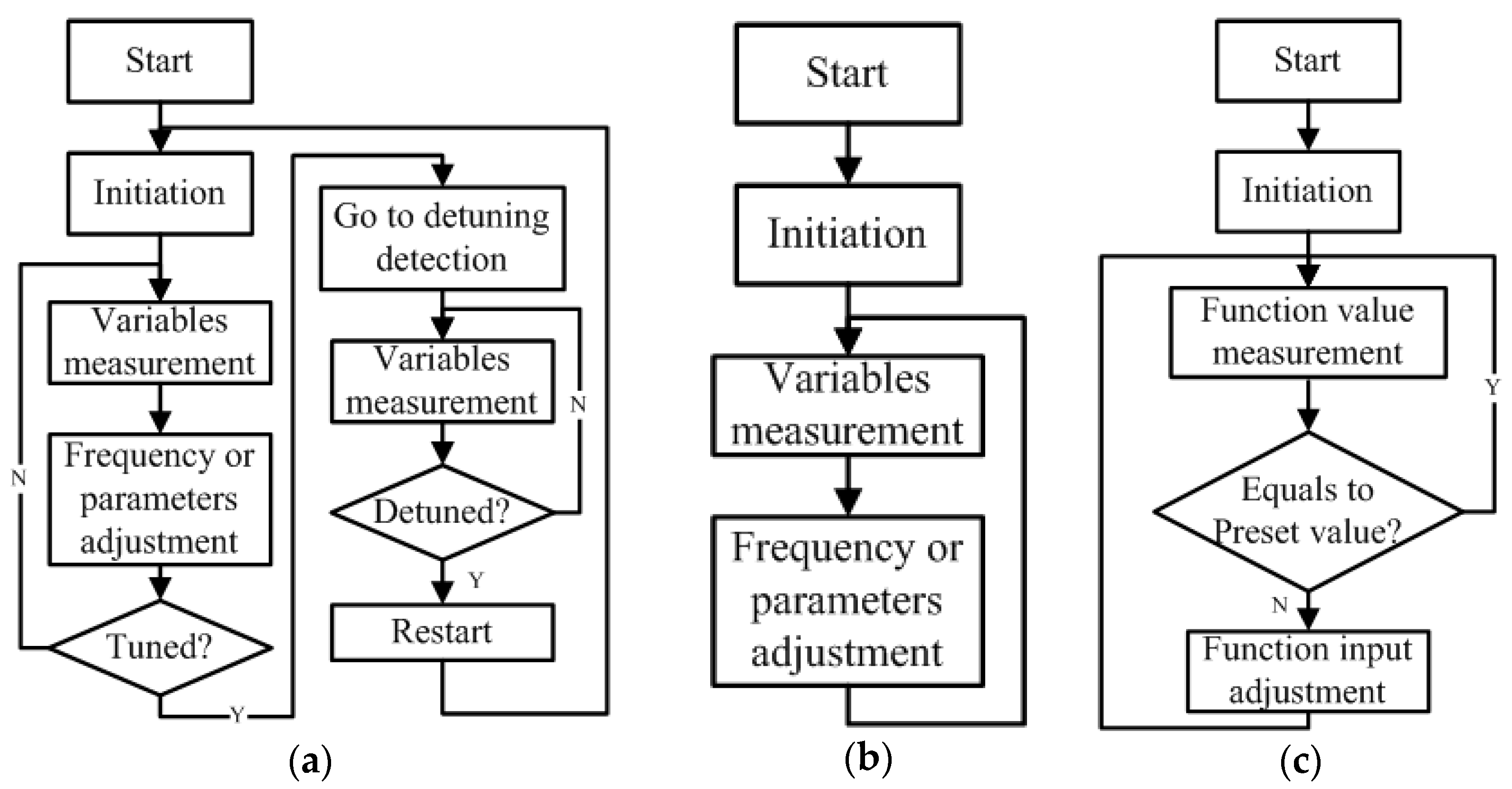
Much of the previous research in this area of WPT focuses on the one-off tuning methods rather than the fully-automatic tuning which keeps the system resonant all the time, shown in
Figure 1a,b, respectively. For the frequency tuning, the methods based on frequency-scanning are often used [
1,
2,
6]. The tuning stops when the resonant frequency is found, so the detuning detection and restart control are needed when the tuning stops. In addition, power is not normally transferred in the tuning process. Many of the circuit parameter tuning methods are also one-off tuning or dynamically-stable tuning, such as the disturbance observation method and the intelligent circuit parameter searching method coming from the automatic impedance matching [
6,
8,
11,
12].
The fully automatic frequency or circuit parameter tuning is also studied before. The frequency control by detecting the detuning loop current in inverter [
9,
13] is complex, and cannot be used in high-power applications for long. The circuit parameters setting, based on the function between the measurement and the control variable, is precise and easily conducted, as shown in
Figure 1c, but some of these methods are based on table or online circuit parameter calculations [
6,
14,
15], and the precise measurement of the circuit parameter values, which must be obtained in advance, are uncertain or changeable in applications. In addition, the previous circuit parameter tuning is not always effective for the variable frequency caused by automatic frequency tuning.
The self-oscillating control method makes the inverter flip at the moment when the TX current crosses zero, so the operating frequency of the inverter, i.e., the self-oscillating frequency, equals to the resonant frequency even if circuit parameters change [
13,
16,
17], which is suitable for automatic frequency tuning. However, due to the frequency-splitting in close coupling condition, there may be multiple resonant points, such as the middle resonant point, odd, and even splitting points. The previous self-oscillating methods make the system operate at one of the splitting points, but not always with maximum efficiency [
18,
19,
20], and some studies indicate that the self-oscillating system becomes unstable under disturbance because it will hop from one splitting point to another when the circuit parameters change [
17].
Furthermore, the self-oscillating control cannot always keep the system resonant since the intrinsic delay in the components of the feedback loop can be added up to several hundred ns and makes the TX current lag behind the output voltage of the inverter, not only detuning the system, but also doing harm to the voltage source inverter, especially at high frequency [
9,
17,
21,
22]. Though the constant delay could be compensated by the negative hysteresis link [
21] and linear network [
22], these methods are only useful for the fixed frequency operation rather than the variable frequency operation caused by frequency tuning. The method in [
23] achieves self-adaptive delay compensation, but it is only verified in loose coupling and needs deeper research.
To solve the problems mentioned above, in this paper, the self-oscillating frequency and its variation trend with circuit parameter changes are analyzed with different feedback variables. The WPT system is modeled as a non-linear switched system, and the Hamel locus is applied since it is precise and intuitive in the prediction of self-oscillating frequency and its variation trend, and is easy in modelling the delay link [
21,
24]. The series-series (SS) topology WPT system is chosen as an example because the resonant frequency in the SS topology is independent of the load and the coupling coefficient [
12,
18]. The TX current and RX current are treated as the self-oscillating feedback variables to analyze the self-oscillating characteristics, and the RX current is chosen for feedback because the system operates steadily in the middle resonant frequency with the maximum efficiency, regardless of the frequency splitting. On the basis of analysis of the variation trend between the self-oscillating frequency and the delay in the feedback loop, a novel automatic frequency tuning with automatic delay compensation is proposed, in which only frequency measurement and delay setting are needed. Furthermore, to realize the automatic frequency tuning, a function of the detuning and the phase difference between the currents in TX and RX is also investigated, and the circuit parameter tuning with the phase difference detection and capacitance adjustment is proposed to realize the synchronous tuning. The experiments verify the effectiveness and robustness of the synchronous tuning method.
2. Analysis of the Self-Oscillating Feedback Methods
The self-oscillating frequency characteristics, using the TX current
i1 or the RX current
i2 as the feedback variable, are analyzed respectively. The power circuit and its linear equivalent circuit of the WPT system are shown in
Figure 2a,b, respectively, and the block diagram for control is shown in
Figure 3.
The power circuit of the WPT system consists of the DC power source, inverter, resonant tanks, rectifier, filter, and load. The DC power source
U0 and the high-frequency inverter composed of MOSFETs
Q1–
Q4 are modeled as a square wave source in
Figure 2b. The resonant tanks contains the coils with the inductances
L1,
L2, the capacitors with the capacitances
C1,
C2, and the two equivalent resistors, whose resistance
R1 in the TX, is the sum of resistances of the source, inverter, and TX coil, and the resistance
R2 in the RX is the sum of resistances of the RX coil, rectifier, and filter. The rectifier, filter
Lf,
Cf, and load
RL can be equivalent to
RL’ in
Figure 2b, where
RL’ = (8/π
2)
RL [
12,
25].
M is the mutual inductance,
, and
k is the coefficient of mutual inductance.
In
Figure 3, the inverter is modeled as an ideal relay link because the dead time in SiC MOSFETs is only several ns and, therefore, ignorable. In order to analyze the frequency characteristics with the feedback variables
i1 or
i2, the Hamel locus functions
H1(
f) and
H2(
f) without the delay
are derived.
The transfer functions
G1(
s) and
G2(
s) can be obtained by solving the complex frequency domain Equation (1) describing the linear part. For the convenience, the circuit parameters of the system is set to symmetrical [
25], i.e.,
R =
R1 =
R2 +
RL’,
L =
L1 =
L2,
C =
C1 =
C2 in (2).
The step response of Equation (2) is:
where the sign “±” is “+” in
q1(
t) and “−” in
q2(
t), and:
It can be seen from Equation (4) that the step responses of i1 and i2 are the superposition of two exponentially-decayed sinusoidal functions.
The square wave responses
i1(
t) and
i2(
t) are the superposition of a series of positive and negative step responses
q1(
t) and
q2(
t), as shown in (5), and the derivatives d
i1(
t)/d
t and d
i2(
t)/d
t are given in (6):
Substituting the period fixed point
t =
T/2 = 1/2
f into (5) and (6) gives the frequency characteristics of
i1,
i2, i.e., the Hamel locus functions, and their derivatives:
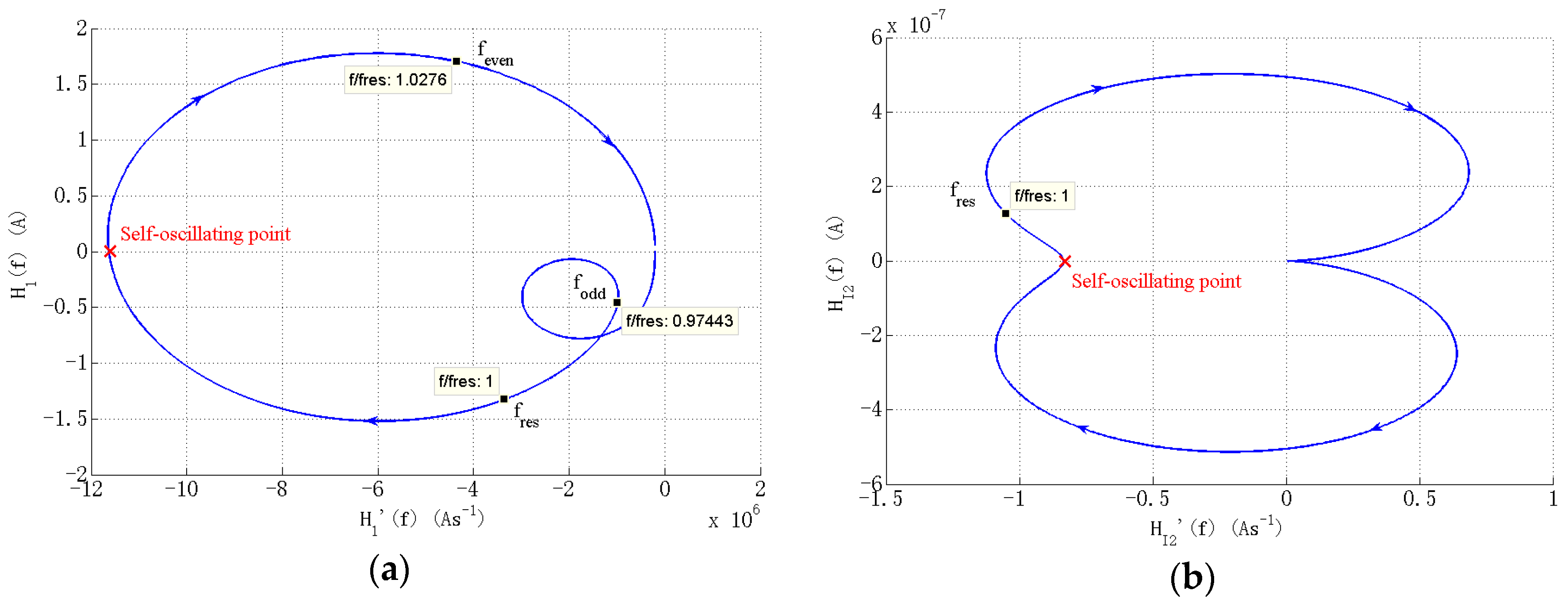
The Hamel loci with the feedback variables
i1 and
i2 are shown in
Figure 4a,b respectively, where
U0 = 20 V,
R = 3 Ω,
L = 50 μH,
C = 1750 pF,
k = 0.056, and the resonant frequency
fres = 538.04 kHz. The system under the chosen frequency is suitable for full bridge inverters, and the close coupling condition
k2Q2 = 17.857 > 1 is satisfied [
20,
25]. The frequency range in the loci is 0.5
fres–2
fres. The arrows in
Figure 4 indicate the direction of the frequency increase. The intersections of the negative
x-axis and the loci are self-oscillating points, and among them the ones crossing from the negative to positive are stable ones, while the others are unstable ones [
21,
24].
For the feedback variable
i1, the inverter flips when
i1 crosses zero, so the self-oscillating points are in coincidence with the middle resonant point or the splitting points, as shown in
Figure 4a. Unfortunately, the middle resonant point with the frequency
fres is unstable, and both of the odd and even splitting points [
26] with the splitting frequencies
fodd and
feven are stable. Studies in [
18,
19,
20] indicate that, in the close coupling 2-coil WPT systems, though the power at
fres is smaller than the one at
fodd or
feven, the efficiency is higher at
fres. The reason why the efficiency is more important than power is that the high power can be easily obtained by high voltage source.
For the feedback variable
i2, the inverter flips when
i2 crosses zero, so the self-oscillating point is not equal to the middle resonant point or the splitting points because of the phase difference between
i1 and
i2, as shown in
Figure 4b. The middle resonant point, however, is located at the intersection between the loci and the negative
y-axis, and can be shifted to the negative
x-axis by adding an integrator in
G2(
s) to yield 90° phase shift, as shown in
Figure 4c.
The circuit parameters disturbance occurs when the inductances and the capacitances of the resonant tanks change in the varying environment. The self-oscillating characteristics under parameters disturbance are analyzed by plotting the Hamel loci of the system with asymmetric parameters. Without loss of generality, the variation in
C2 represents the detuning. The explicit Hamel locus functions are difficult to derive, so the Symbolic Math Toolbox of the MATLAB is used.
Figure 5a,b shows the Hamel loci for the feedback variables
i1 and
i2, respectively, with the
C2 increased to 1900 pF. An integrator is added in
Figure 5b to produce a 90° phase shift. In
Figure 5a, there is only one stable self-oscillating point rather than two, as in
Figure 4a, and this point is in the vicinity of the even splitting point. Thus, if the system operates at the odd splitting point originally, this circuit parameter disturbance will make the system go into the even splitting point after being retuned, which means the robustness for the feedback variable
i1 is low. While in
Figure 5b, there is only one stable self-oscillating point when detuning, so the system goes back to the middle resonant point after being retuned. As a result,
i2 is more suitable for feedback.
3. Automatic Delay Compensation in Self-Oscillating WPT System
The frequency characteristics and delay compensation of the self-oscillating WPT system with the delay
are analyzed in this section. The transfer functions of
i1 and
i2 with the delay are:
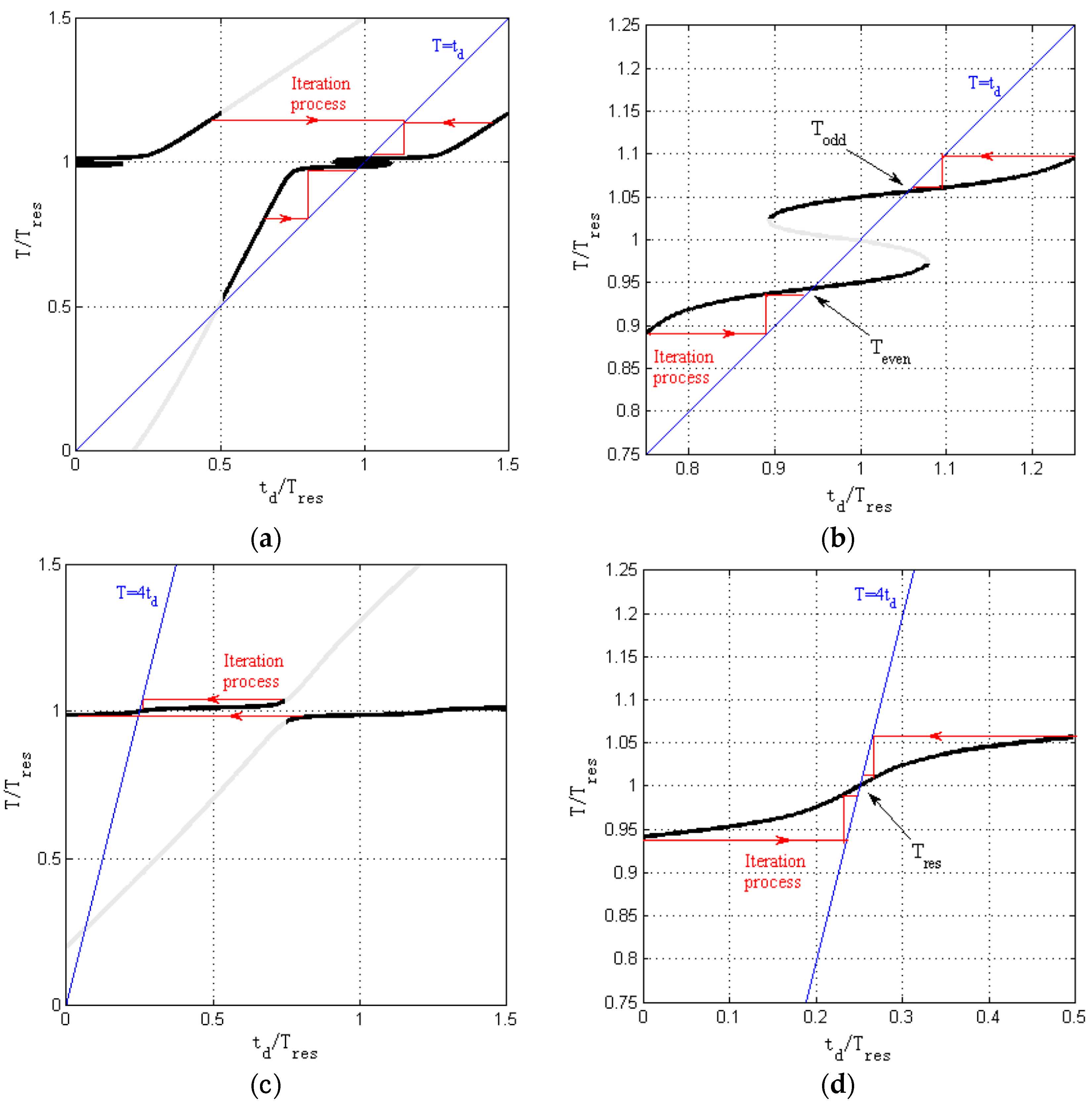
The Hamel locus function
Hd1,2(
f) with the delay are obtained by derivation similar to Equations (3)–(7). The implicit function (Equation (10)) of the delay
td and the self-oscillating period
T is obtained by letting
Hd1,2(
f) = 0, and the function is plotted in
Figure 6 in the different range of
td.
For the feedback variable
i1 shown in
Figure 6a,b, all of the deep-colored points in the curve represent the stable self-oscillating points, and the light-colored ones represent the unstable self-oscillating points. In
Figure 6b, the upper intersection between the line
T =
td and the stable part of the curve is the odd splitting point, and the lower is the even splitting point, the
U0 lags
i1 by exactly one period at these two points. So the splitting points can be reached by setting
td =
T repeatedly, as in the iteration process shown by the red arrows. The system stabilizes at the odd splitting point with a longer initial delay, and at the even mode point with a shorter initial delay. Similarly, when using
i2 as the feedback variable in
Figure 6c,d, the middle resonant point locates at the unique intersection between the line
T = 4
td and the stable part of the curve. Thus, it can be reached by setting
td =
T/4 repeatedly, which is equivalent to a 90° phase shift in the feedback loop just like an integrator in
Figure 4c. Only 2–3 iterations are needed if the initial delay is in the vicinity of the estimated target values, such as in
Figure 6b,d, while more iterations are needed for a large deviated initial delay.
The resonant points can be found in a large frequency range even if the circuit parameters are unknown, so new resonant points can be reached when the parameters varies because the iteration is always in progress. Moreover, the error of the frequency measurement can be limited to the level of 0.002% easily (about 10 Hz, for two decimals in kHz), which is precise enough for the delay setting using controllable delay lines such as the DS1023-500. The precision of the frequency measurement is higher than that of the measurement of the voltage, current or reflected impedance amplitude, and the random error, due to the voltage fluctuation in the amplitude measurement, does not occur in the frequency measurement. This method can also be used on the occasion where the input voltage is unstable because no amplitude is measured, and the measurement and actuator are easy to realize, so the practicability is fairly high.
4. Synchronous Tuning
The purpose of circuit parameter tuning is to keep the resonant frequency of the TX equal to that of the RX all the time, i.e.,
fres =
fres1 =
fres2:
The frequency tuning here is automatic and affected by the circuit parameter variation during the circuit parameter tuning according to the analysis in
Figure 5b. Thus, the function between the detuning and the phase difference of
i1 and
i2 is studied below, and an automatic circuit parameter tuning method with phase difference measurement and capacitance adjustment is proposed based on the function. The capacitor
C1 is chosen for adjustment because powering the actuator in the TX is easier than that in the RX.
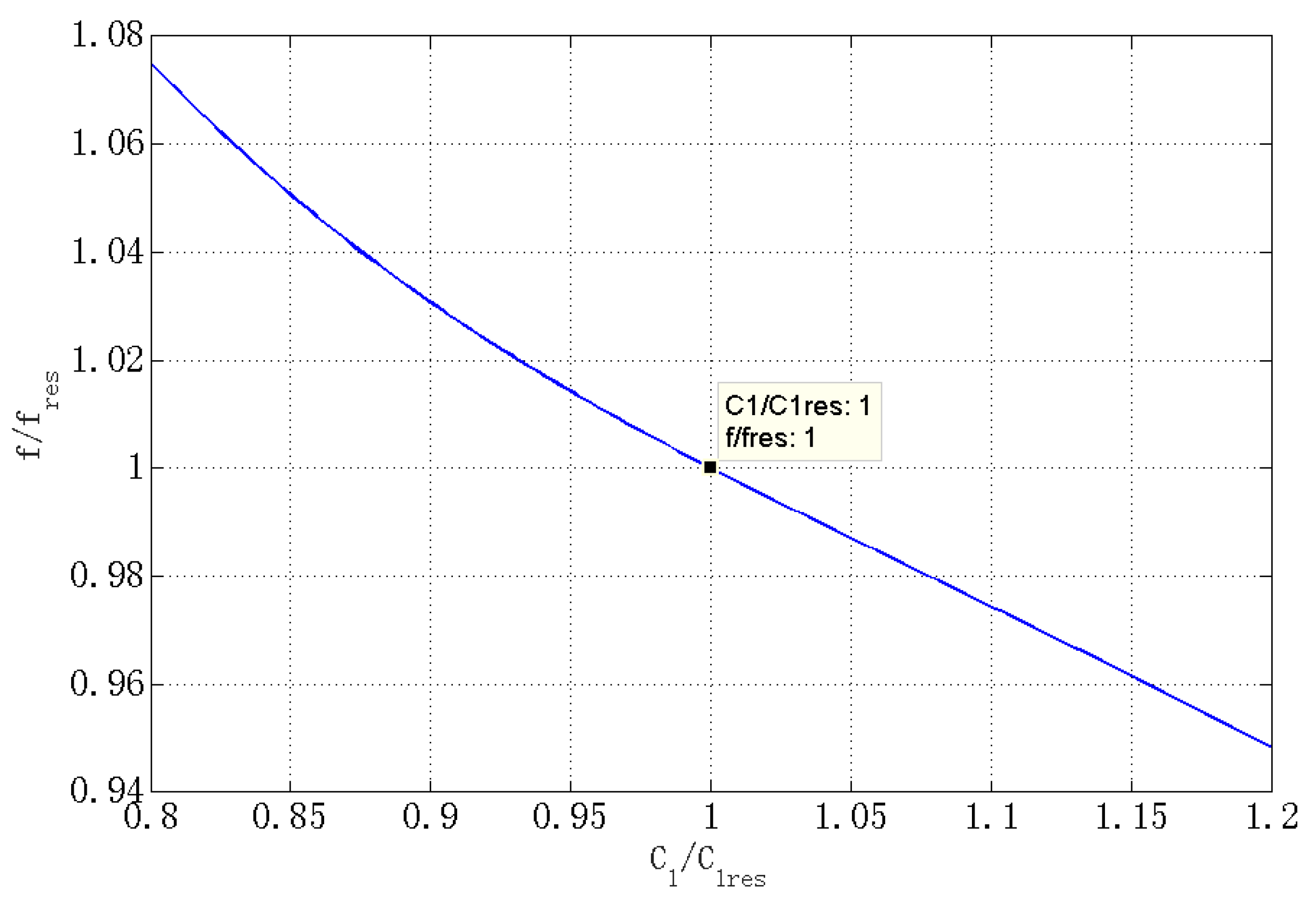
Firstly, the frequency characteristic function for the automatic frequency tuning is obtained by setting the delay in the Hamel locus function
Hd2(
f) to
td =
T/4 = 1/4
f. The capacitance
C1 is treated as an independent variable to derive the relation of
C1 and self-oscillating frequency
f as:
and the function
f(C1) is obtained by solving (12) and plotted in
Figure 7. Substituting
s =
jω in Equation (1) to obtain the Equation (13), and the
i1 and
i2 in the frequency domain can be obtained by solving Equation (13):
where
C1 and ω are independent variables, and
I1 and
I2 are the current phasors.
Secondly, substituting the value of
C1 and its corresponding angular frequency ω = 2π
f in the
f(C1) in the
i1(
C1,ω) and
i2(
C1,ω) to obtain the functions of
C1 and the phase of
i1 and
i2, i.e.,
1(
C1), and
2(
C1), and then the phase difference function
Δ(C1)
= 2(
C1) −
1(
C1), as shown in
Figure 8.
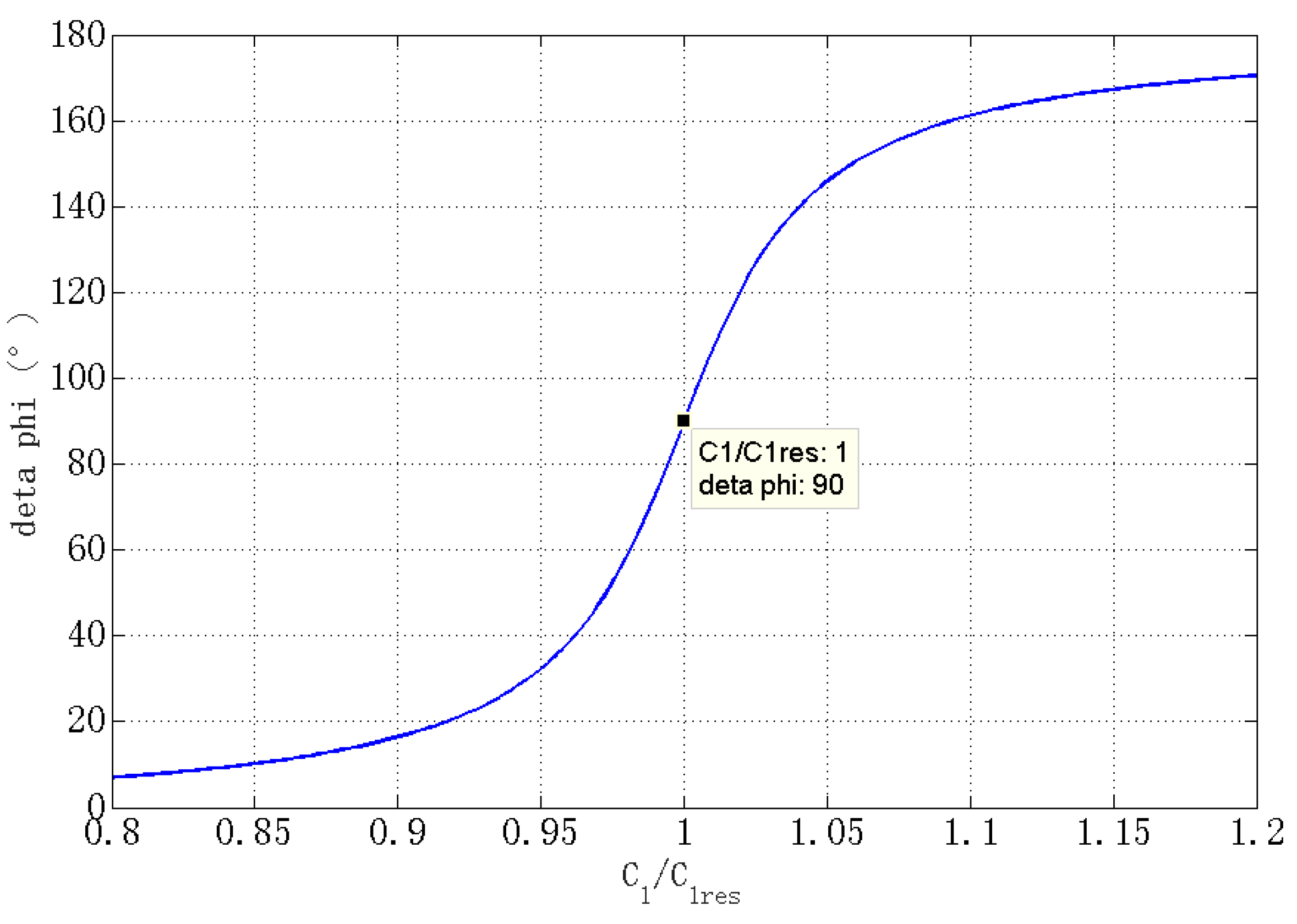
Above all, it is clear that this function is monotonic, and the circuit parameters are tuned only when Δ = 90°. Therefore, the circuit parameter tuning can be realized by the inspection of the Δ and the adjustment of the C1 to keep Δ = 90° within the margin of error.
5. Experimental Verification
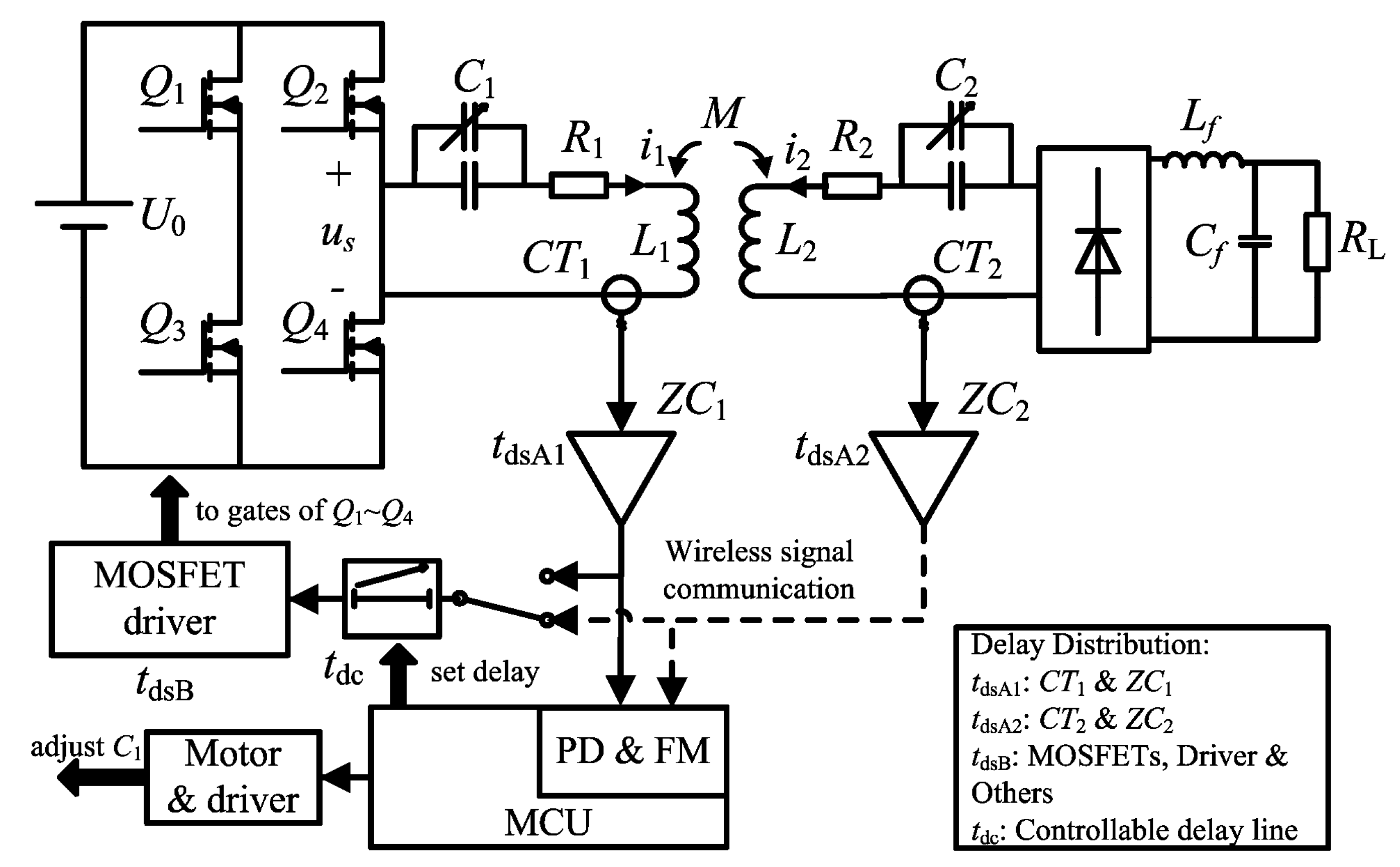
The system block diagram and experimental platform are shown in
Figure 9 and
Figure 10, respectively. The synchronous tuning circuit includes the self-oscillating feedback loop, delay adjustment circuit, and capacitance adjustment circuit. The feedback loops for the feedback variable
i1 and
i2 include the current transformer
CT1,
CT2, zero-crossing comparator
ZC1,
ZC2, controllable delay line, and MOSFET driver. A wireless signal transfer module is needed to meet the demand of the transfer distance and rate in the feedback loop for
i2, such as the fast infrared module HSDL-3602 with the link distance 1.5 m and signal rate 4 Mb/s, or radio frequency module [
18] for further transfer distance and with a block between the TX and the RX. The delay adjustment includes the frequency measurement (FM) in the microcontroller unit (MCU) and the controllable delay line. The circuit parameter tuning circuit includes phase detector (PD) in the MCU and a variable capacitor adjusted by a stepper motor. Capacitor arrays or varicap diodes can also be used on different occasions [
6,
11,
12,
25]. The components and circuit parameters are listed in
Table 1 and
Table 2, respectively. The high-
Q resonant tanks are comprised of copper pipes with large diameter and ceramic plate capacitors with low dielectric loss. The inductances and capacitances are measured by an inductance (L), capacitance (C) and resistance (R) meter (LCR meter) (TH2828, Tonghui Electronic Co. Ltd., Changzhou, Jiangsu, China), the equivalent resistances are measured by dividing the resonant voltage by the resonant current, and the middle resonant frequency, splitting frequency and the intrinsic delay are observed with an oscilloscope (TDS2024B, Tektronix Electronic Co. Ltd., Beaverton, OR, USA). The calculated values of these resonant frequencies are acquired using the measurement values of the components. The delay for the feedback variable
i1,2 includes the controllable delay
tdc and the intrinsic delay
tds1,2, i.e.,
td =
tds1,2 +
tdc, and
tds1,2 =
tdsA1,2 +
tdsB, marked in detail in
Figure 9. The required
td can be acquired by setting
tdc =
td −
tds1,2 using the controllable delay line made of two DS1023-500 in cascade, with the delay step of 5 ns. The delays of the
CT1,2 are far shorter than 5 ns and can be included within the
tds1,2 as a constant.
The flow chart of the automatic delay compensation is shown in
Figure 11 according to the analysis in
Section 3. The estimated value of the initial delay
td(0) is set to the vicinity of
Tres for the feedback variable
i1, and to the vicinity of
Tres/4 for the feedback variable
i2 in order to achieve a short stabilization time. The iteration process is shown in
Figure 12, and the range of delay, period, and frequency are measured and listed in
Table 3. It can be seen that for the feedback variable
i1, the system stabilizes at the odd splitting point under a long initial delay, and at the even splitting point under a short initial delay; and for
i2, the system stabilizes at the middle resonant point regardless of the initial delay. The tuning process is not only fully automatic with the repetitive loop, just as is shown in
Figure 1b, but also fast because only 2–3 iterations are needed for
i1, and 1–2 iterations for
i2.
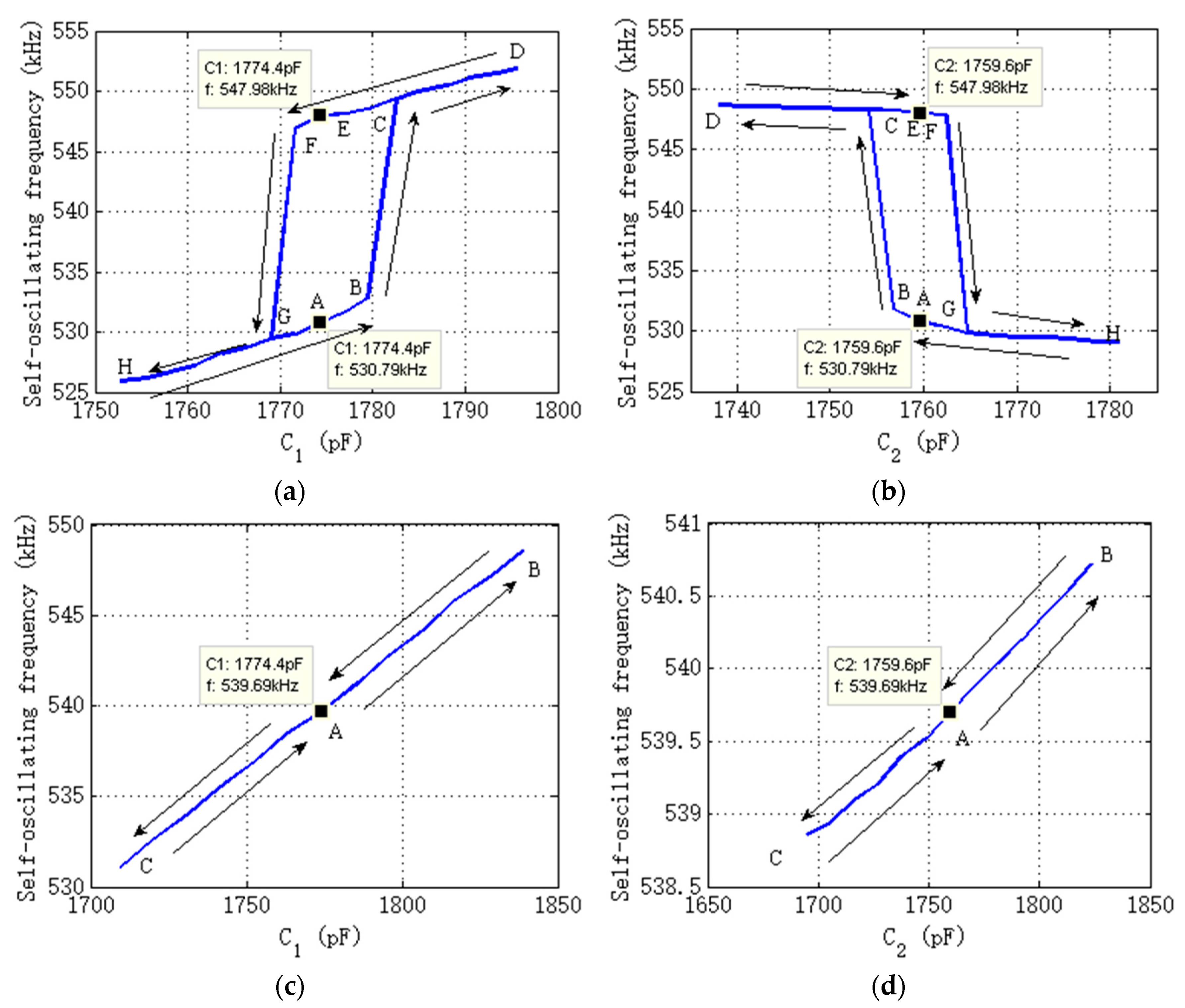
The
Figure 13 shows the variation tendency of the self-oscillating frequency with
C1 or
C2, for the feedback variable
i1 or
i2, respectively. In
Figure 13a, for the feedback variable
i1, the system is initially tuned in the odd splitting point. When
C1 increases from the tuned value
C1res to a certain amount, the frequency will hop to the vicinity of the even mode, and the frequency is tuned to the even mode when
C1 decreases to
C1res again, as shown in the track ABCDE. The track EFGHA shows the frequency hopping from the even to odd splitting point. The similar frequency variation process with the change of
C2 is shown in
Figure 13b, while in
Figure 13c,d, for the feedback variable
i2, the system always goes back to the middle resonant point after the
C1 or
C2 is retuned, so the robustness for
i2 is stronger. The variation trends of the self-oscillating frequency in the experiments are in good agreement with the analysis in
Section 2, and the transfer power and efficiency shown in
Table 4 indicate that though the power is lower, the efficiency is higher at the middle resonant point.
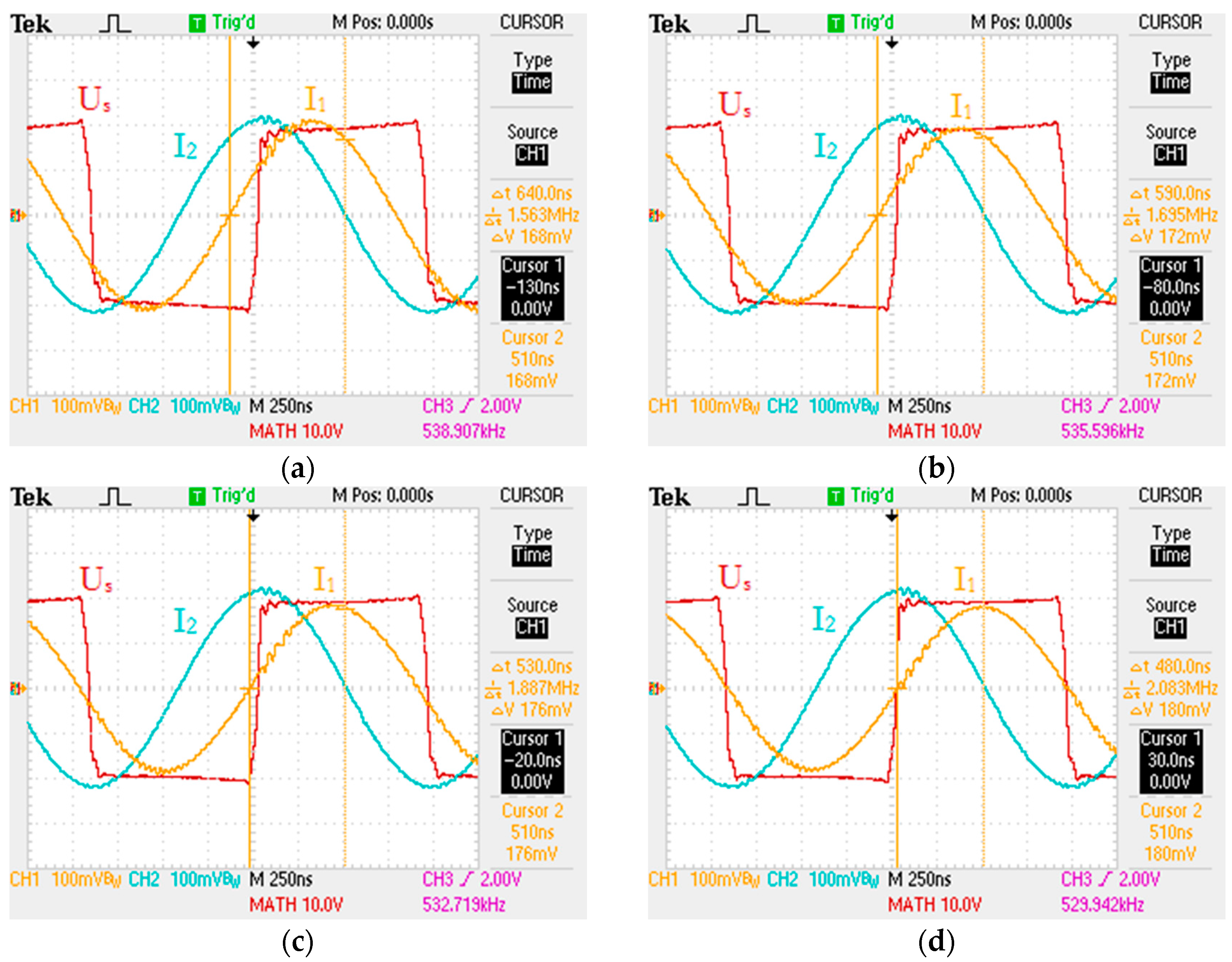
The waveforms of
us,
i1, and
i2 for the automatic circuit parameter tuning are shown in
Figure 14. The current values are obtained by measuring the voltage across the sampling resistor in the current transformer and displayed as the voltage value in the oscilloscope. In
Figure 14a,
C2 is set to 1823.6 pF, which is 64.0 pF larger than that of the original resonant value to represent the circuit parameter tuning, and the phase different of
i1 and
i2 is far less than 90°. Thus, the new resonant value of
C1 needs to be increased according to the analysis in
Figure 8. In
Figure 14b–d, the phase difference approaches to 90° gradually, and finally comes into the range of 90° ± 1°. The frequency detuning exists for a short time, but disappears after the automatic circuit parameter tuning. The amplitude of
i2 almost remains constant in the process, indicating that the received power is stable in a certain range of detuning during the tuning process.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}