The variable wind directions under typhoon activity may lead to large areas of blades being affected by the violent wind, which can cause large increments of wind loads to act on the blades. The strong wind loads on blades can bring huge impacts on the regulating mechanism and the yaw control system, resulting in failures of wind turbine structures. Additionally, in the case of large angle of attack, the wind loads on blades are evidently unsteady, which will have an important influence on the fatigue of the wind turbine.
4.1. Total Aerodynamic Forces Acting on the Wind Rotor
The aerodynamic force is one of the major loads for the wind turbine. The total aerodynamic force acting on the wind rotor can be passed to the tower and foundation through the transmission shaft, which will significantly affect the loading on the tower and foundation.
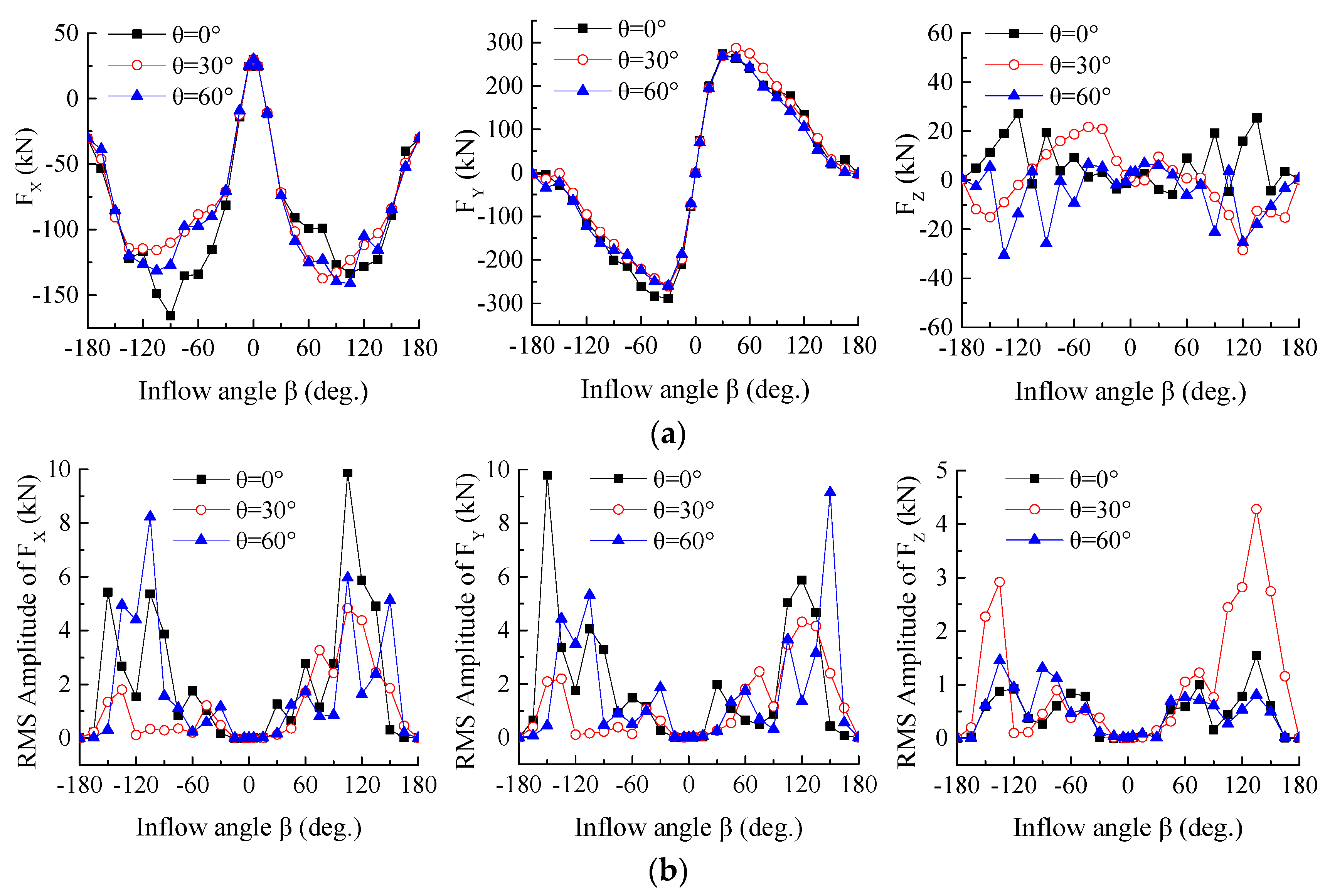
Figure 6 shows the relationship between the total aerodynamic forces of wind rotor and the wind directions, among which
FX,
FY and
FZ are the three-dimensional total forces in the wind rotor coordinate system, and the plus and minus signs here just indicate the loading direction.
Figure 6a provides the average values of the total aerodynamic forces as the wind direction β varies in the interval (−180°, 180°). It is clear that the horizontal force
FY is the greatest, followed by the axial force
FX and the vertical force
FZ. Overall, the axial force
FX and the horizontal force
FY approximately experienced a process of increasing first and then decreasing, with sharp variance in the range of |β| = 0°–30°. The maximum of
FX occurred in the range |β| = 75°–105°, and the maximum of
FY occurred in the range |β| = 30°–45°. However, the vertical force
FZ fluctuated with wind direction, and
FZ on the wind rotors in the θ = 0° and θ = 60° parking positions had a similar magnitude but acted in the opposite direction. It is worth mentioning that the average values of
FY and
FZ are almost equal to zero at the favorable wind direction β = 0°; in contrast, the axial force
FX is greater at this time, and acts in the positive direction only when β = −5°–5° because of the special aerodynamic form of the blade.
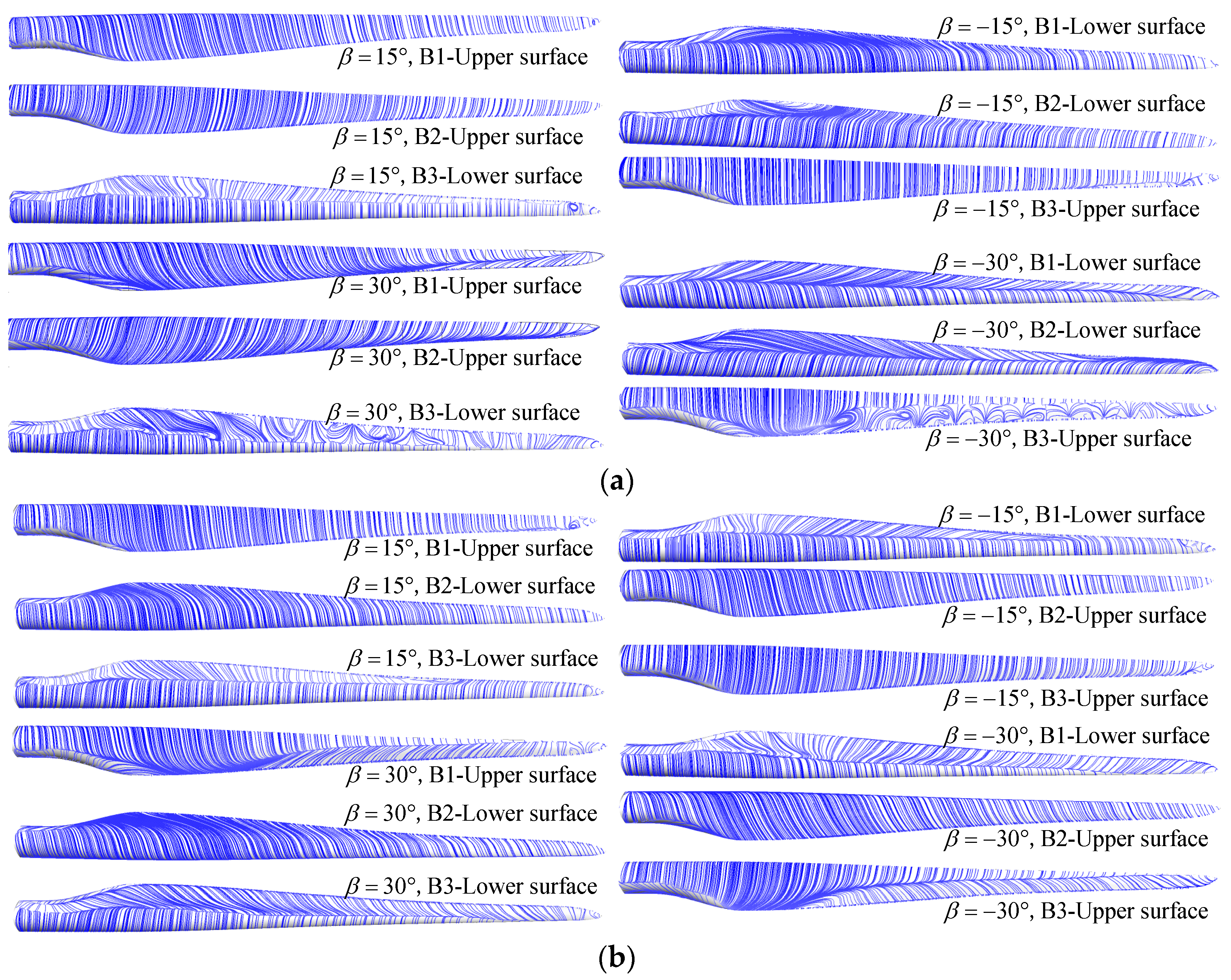
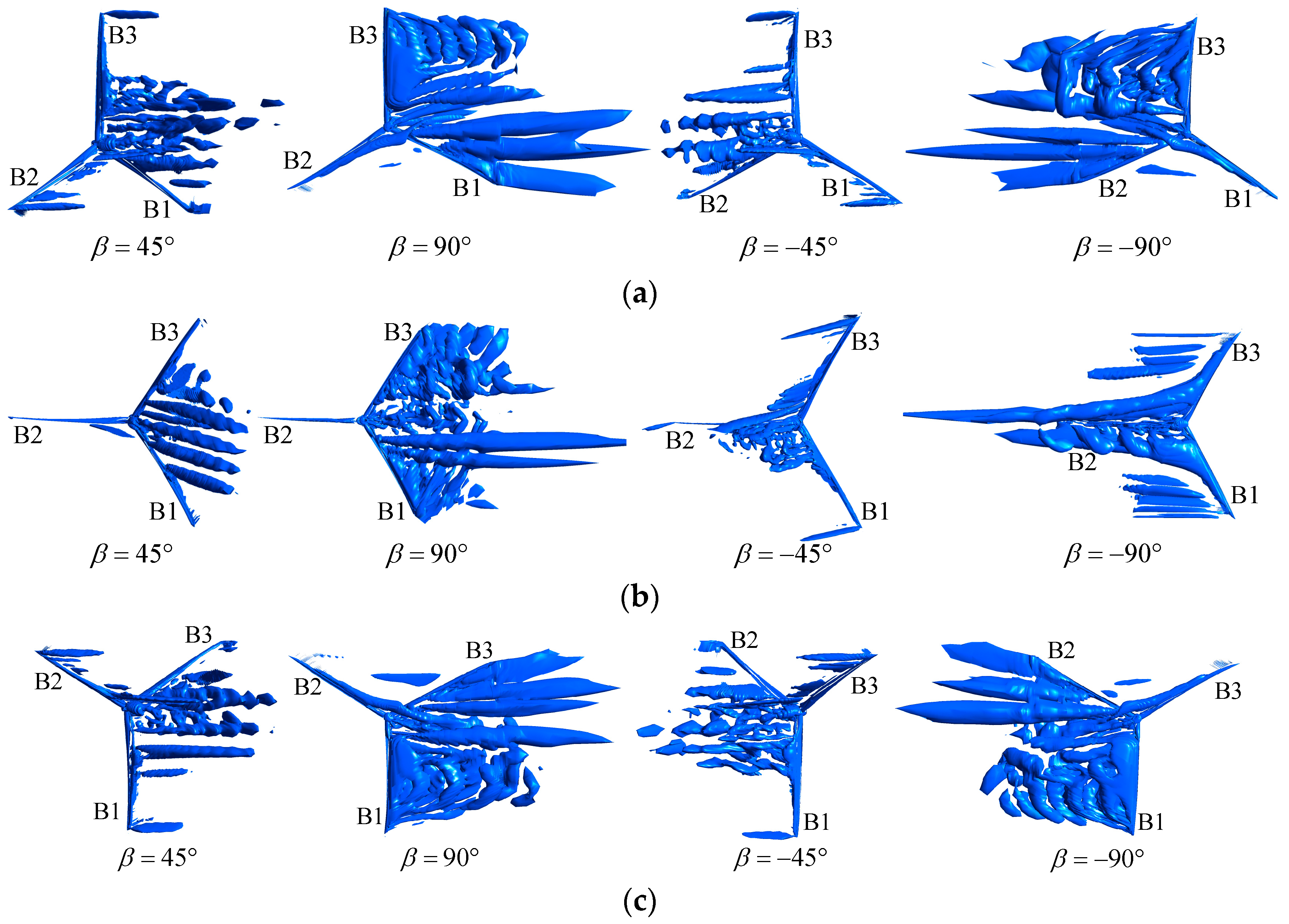
Figure 6b gives the root-mean-square (RMS) amplitude of the total aerodynamic forces, in which the RMS amplitude is the root mean square of the fluctuating load that equals the aerodynamic load minus its average value. It is shown that the RMS amplitudes of the total aerodynamic forces increase quickly when the wind direction |β| rises above 30°, which agrees with the flow field characteristics shown in
Figure 4. A large vortex started to appear on the leeward side of the blade when the wind direction rose to |β| ≥ 30°, as a result, the fluctuating load rapidly increased. Moreover,
Figure 6b also shows that the peak RMS amplitudes of the total aerodynamic forces occurred in the range of |β| = 105°–150°, in these cases, the fluctuating load can be much greater than that produced by the turbulence of typhoon [
34,
38,
39,
40], and it may have a large effect on the fatigue properties of the tower and foundation, potentially causing devastating damage to them.
Furthermore, for wind rotors in different parking positions, there was little difference in the average values of the total aerodynamic forces except
FZ, but a great difference in the fluctuation characteristic of the total aerodynamic force. The RMS amplitudes of
FX and
FY acting on the wind rotor in the θ = 30° parking position were significantly smaller than that of
FX and
FY acting on the wind rotors in the other two parking positions, but the RMS amplitude of the vertical force
FZ on the wind rotor in the θ = 30° parking position was larger. The RMS amplitude of
FX reached its maximum value of 9.89 kN at the θ = 0° parking position, which was 2.04 and 1.20 times that of the θ = 30° and θ = 60° parking positions; the RMS amplitude of
FY reached its maximum value of 9.80 kN also at the θ = 0° parking position, which was 2.27 and 1.07 times that of the θ = 30° and θ = 60° parking positions; the RMS amplitude of
FZ reached its maximum value of 4.28 kN at the θ = 30° parking position, which was 2.77 and 2.94 times that of the θ = 0° and θ = 60° parking positions.
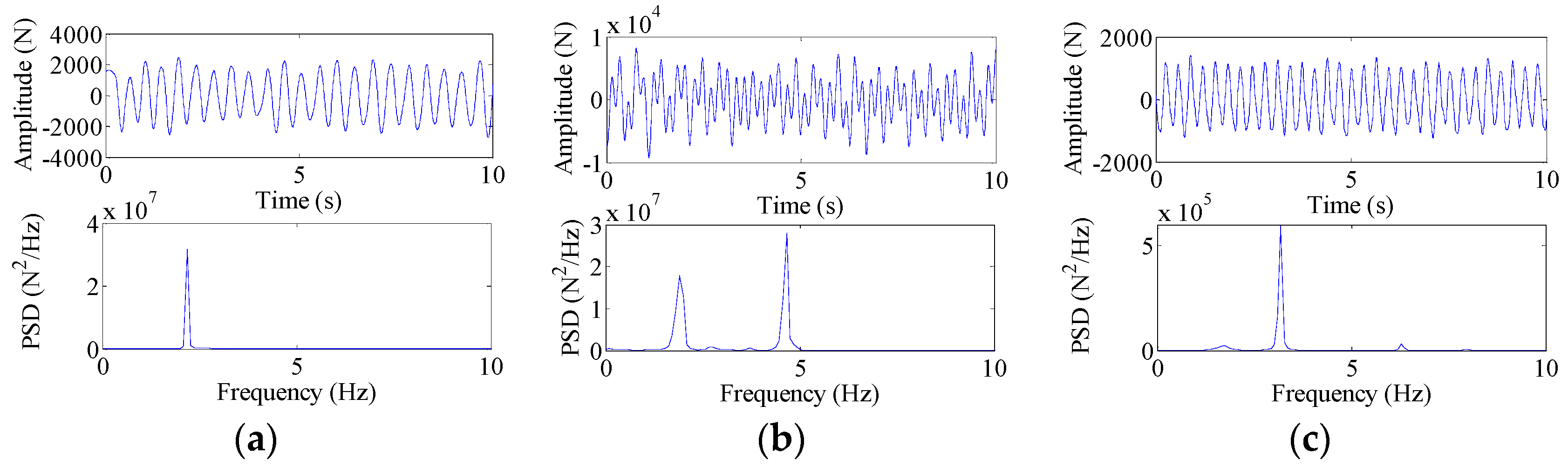
Figure 7,
Figure 8 and
Figure 9 provide the time-domain waveforms and the frequency spectrograms of the total aerodynamic forces acting on the wind rotor at several typical wind directions. Based on the figures, under the same wind flow direction, for the three parking positions of the wind rotor, there is obviously difference in the magnitude and dominant frequency of the fluctuating load in the
X-axis direction, from which we can observe that the parking position significantly influence the fluctuation characteristic of the total aerodynamic force.
Table 2 gives the range of the dominant frequency of the total aerodynamic force; the result data indicates that the dominant frequency of the total aerodynamic force is not only related to wind direction but also rotor parking position. Those feathering wind directions of −5°–5° or 180° are ignored here to observe clearly the effects of wind direction and rotor parking position on the wind load dominant frequency. It shows that the ranges of the dominant frequency of the three-dimensional total forces acting on the wind rotor are nearly the same size, and the dominant frequency of the total aerodynamic force changes within a large scale from low frequency to high frequency. Most forces with high frequency appeared in the range of |β| = 15°–30° or 150°–165°, and forces with low frequency appeared in the range of |β| = 60°–120°. For the wind rotor in the θ = 0° parking position, the range of the dominant frequency was larger than that of the other two parking positions; for the wind rotor in the θ = 60° parking position, the dominant frequency of the total force was more significantly affected by wind direction, and there existed no dominant frequency greater than 7 Hz when the wind direction β > 0°; for the wind rotor in the θ = 30° parking position, the range of the dominant frequency was the minimum, except that of the dominant frequency of
FZ.
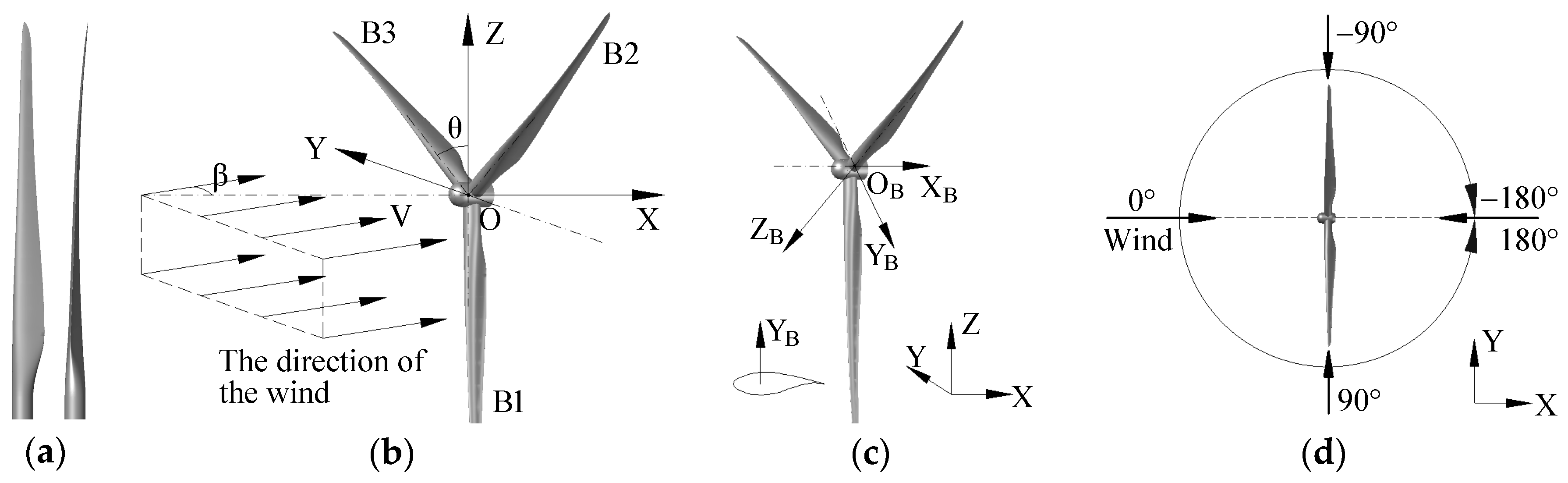
The coordinate system {
XG, YG, ZG} was built in the center of the foundation, whose coordinate axes were the same as the rotor coordinate system {
X,
Y,
Z}; based on that, we could calculate the aerodynamic loads acting on the foundation passed from the wind rotor. As shown in
Figure 10,
MZG is the torsional moment passed from the wind rotor, and
MXYG is the overturning moment passed from the wind rotor, which can be expressed as:
Similar to the total aerodynamic force, the average values of MXYG and MZG also increased first and then decreased gradually, reached their maximum in the range of |β| = 30°–45°. For wind rotors in different parking positions, the averages of MXYG were similar, the maxima of which were 28.52, 28.11 and 27.01 MN·m in the θ = 0°, θ = 30° and θ = 60° parking positions, respectively; however, the averages of the torsional moment MZG had great changes with the parking positions, and the curve of MZG varied with wind direction in the θ = 30° parking position was similar to the curve which was obtained by translating the curve of MZG in the θ = 0° or θ = 60° parking position 1 MN·m upwards. Then, the torsional moment MZG of the θ = 30° parking position was greater than that of the other two parking positions when the wind direction β < 0°, and it became smaller when the wind direction β > 0°.
4.2. Total Aerodynamic Moments of the Wind Rotor
In the rotor coordinate system {
X,
Y,
Z}, the total aerodynamic moments of the wind rotor can be divided into the wind torque
MX, pitching moment
MY and yawing moment
MZ.
Figure 11,
Figure 12,
Figure 13,
Figure 14,
Figure 15 and
Figure 16 show the curves of variation of the average total aerodynamic moments with wind direction, and
Figure 17 shows the fluctuation characteristic of the total aerodynamic moment. Unlike the total aerodynamic force, the total aerodynamic moments are significantly affected by the parking positions, in both average values and fluctuation characteristics.
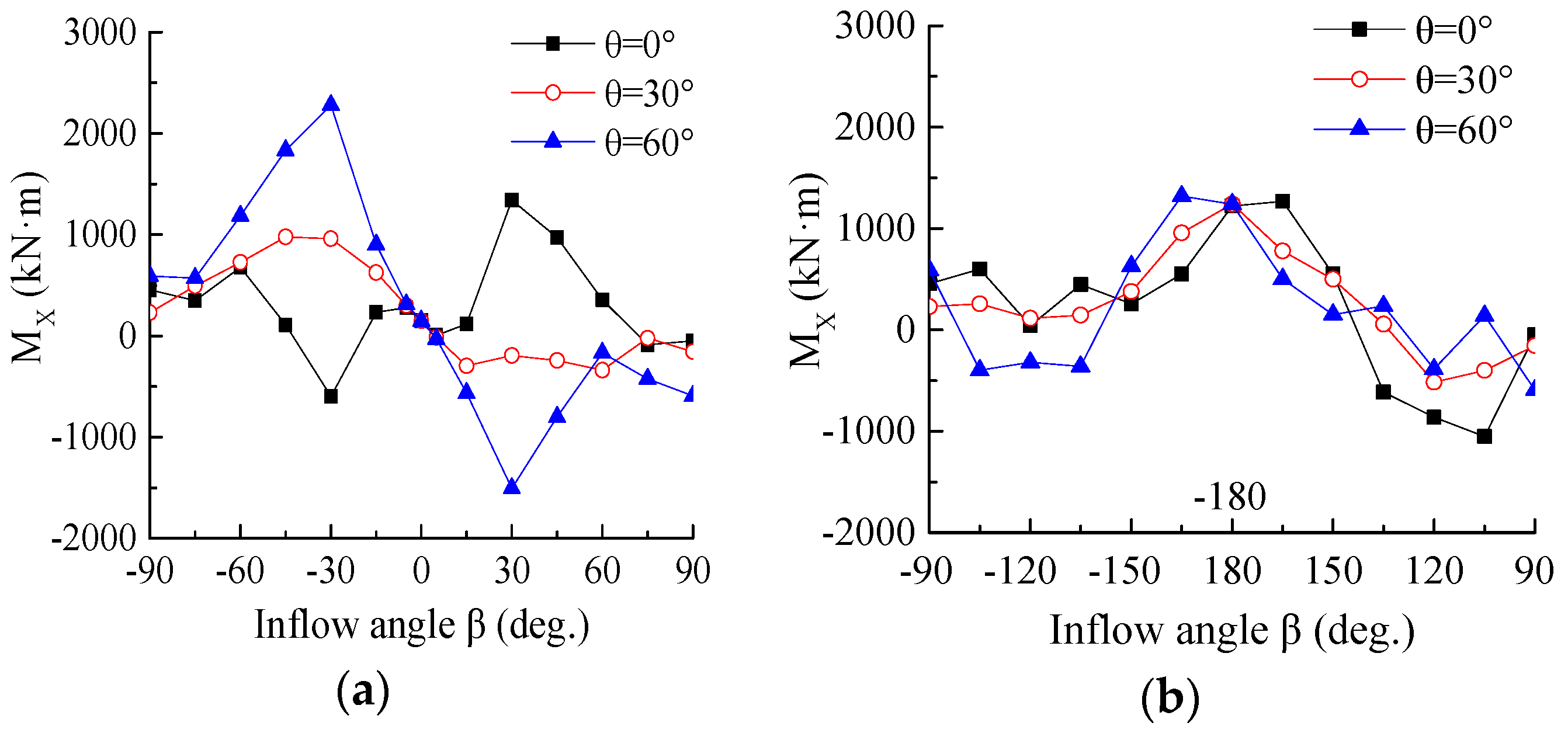
Figure 11 shows the curves of the average wind torque
MX varied with wind direction. To show the variation clearly, we divided the wind direction interval into two sections. In the wind direction interval (−90°, 90°), the average wind torque
MX increased first and then decreased approximately, reaching its maximum when the wind direction |β| = 30°–45°; the wind torque
MX of wind rotors in the θ = 0° and θ = 60° parking positions were opposite for most wind directions, and they were all greater than that of the rotor in the θ = 30° parking position. In the wind direction intervals (−180°, −90°) and (90°, 180°), there were little differences in the average wind torque
MX among the three parking positions, and the peak values appeared at |β| = 165°–180°. In full wind direction, the average wind torque
MX of the rotor in the θ = 0° parking position reached the maximum value of 1341.66 kN·m at the wind direction of β = 30°; the average wind torque
MX of the rotor in the θ = 30° parking position reached the maximum value of 1240.91 kN·m at the wind direction of β = ±180°; and the average wind torque
MX of the rotor in the θ = 60° parking position reached the maximum value of 2279.74 kN·m at the wind direction of β = −30°, which was 1.37 times that of the rated operating state.
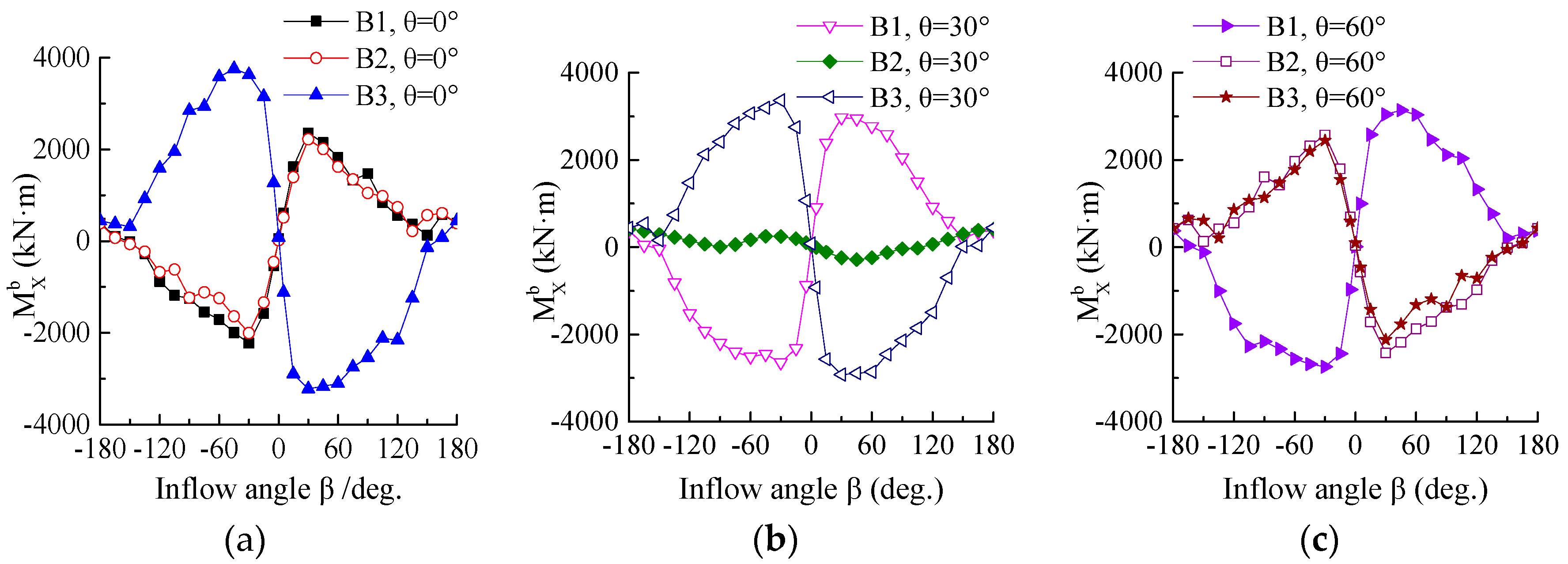
To better understand the variation of the wind torque
MX with wind direction,
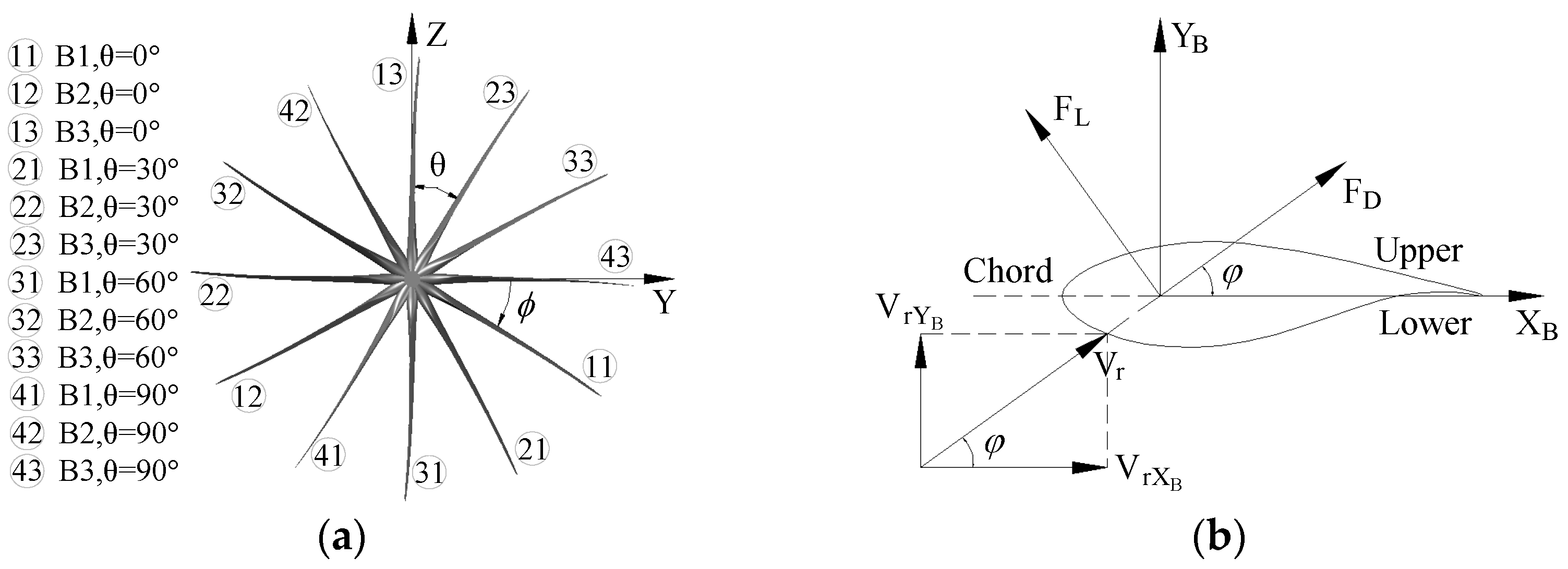
Figure 12 shows the contribution of each blade to the wind torque. We use
,
and
here to represent the moments of a single blade in the rotor coordinate system, in order to distinguish them from the total aerodynamic moments of the wind rotor. It is clear that the moment
of each blade is subject to a sinusoidal distribution, which directly relates to the attack angle of blade as shown in Equation (4). The plus-minus of the attack angle determines the direction of the blade moment
, and the size of the attack angle also approximately determines the size of the blade moment
. With little effect of the hub, the wind torque
MX is approximately equal to the sum of the moments
of the three blades of the wind rotor. Therefore, the wind torques of the rotors in the θ = 0° and θ = 60° parking positions were opposite for most wind directions because of the different windward sides (opposite algebraic signs of the attack angle); for the wind rotor in the θ = 30° parking position, the moments
of blades B1 and B3 were nearly the same in size and opposite in direction, thus making the wind torque smallest. Moreover, as the moments
of the three blades of the wind rotor had the same direction when the wind direction |β| = 150°–180°, a peak of the wind torque appeared at the wind direction angle of ±180° nearby.
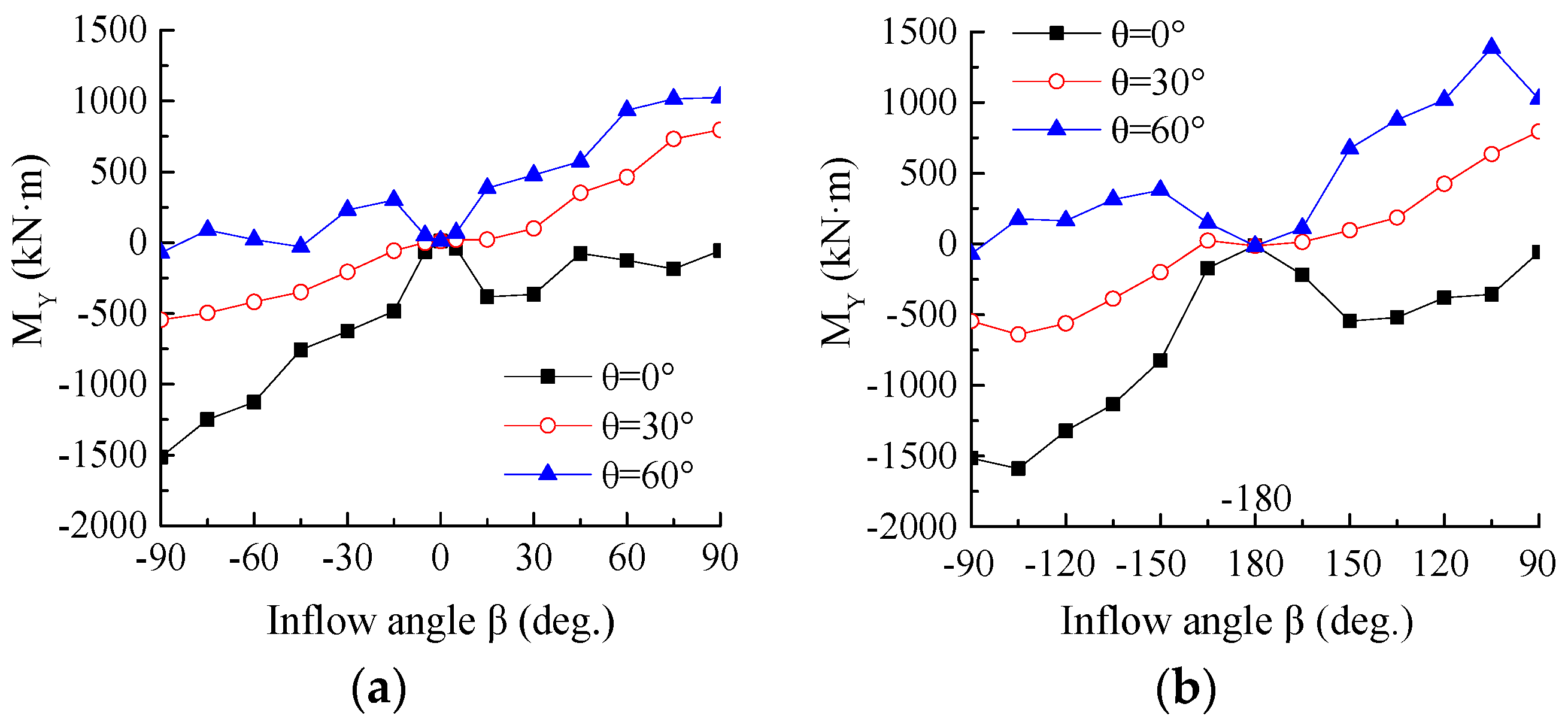
Figure 13 shows the curves of the average pitching moment
MY varied with wind direction. The average pitching moment
MY shows approximately a linear relationship with the wind direction β in the two sections of the wind direction interval. In the range of small wind direction angles (−15° < β < 15° and 150° < |β| < 180°), the pitching moments
MY of rotors in the θ = 0° and θ = 60° parking positions are very sensitive to the changes in wind direction, which dropped to zero quietly at the favorable wind direction (β = 0° or ±180°). The influence of rotor parking positions on the pitching moment
MY was also obvious: the pitching moment
MY of the rotor in the θ = 0° parking position was almost in the negative direction, the pitching moment
MY of the rotor in the θ = 60° parking position was almost in the positive direction, and the pitching moment
MY of the rotor in the θ = 30° parking position fell in between the above two. In full wind direction, the average pitching moment
MY of the rotor in the θ = 30° parking position reached the maximum value of 795.95 kN·m at the wind direction of β = 90°; the average pitching moment
MY of the rotor in the θ = 60° parking position reached the maximum value of 1388.66 kN·m at the wind direction of β = 105°; the average pitching moment
MY of the rotor in the θ = 0° parking position reached the maximum value of 1587.76 kN·m at the wind direction of β = −105°, which was 7.63 times that of the rated operating state, even close to the value of the wind torque in the rated operating state, that would pose a great threat to the regulating mechanism.
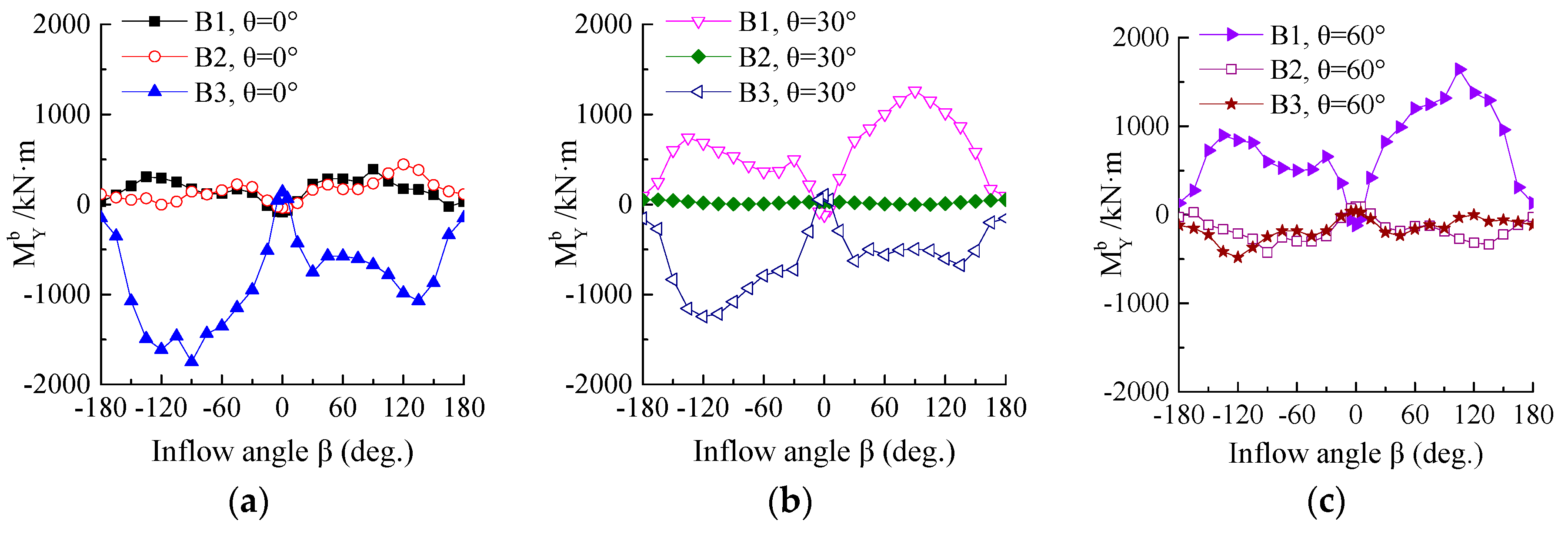
Figure 14 shows the contribution of each blade to the pitching moment. Unlike operating states, the pitching moment has almost nothing to do with the wind shear, but directly relates to the blade position. The pitching moment of the rotor in the θ = 0° parking position was dominated by blade B3, the pitching moment of the rotor in the θ = 60° parking position was dominated by blade B1, and the moments
of the above two blades were opposite because of the different windward sides, so the pitching moments of the rotors in these two parking positions were also opposite; moreover, the moment
of each blade changed sharply in the range of small attack angles due to the aerofoil lift-drag force characteristic, and then the pitching moment became very sensitive to the wind direction changes in the range of small wind direction angles. Alternately, the pitching moment of the rotor in the θ = 30° parking position was dominated by blades B1 and B3 jointly, among which the moment
of blade B1 was similar to that of blade B1 of the rotor in the θ = 60° parking position, and the moment
of blade B3 was similar to that of blade B3 of the rotor in the θ = 0° parking position, it was the reason why the pitching moment of the rotor in the θ = 30° parking position fall in between that of the other two parking positions, with a smooth variation and no large gradient.
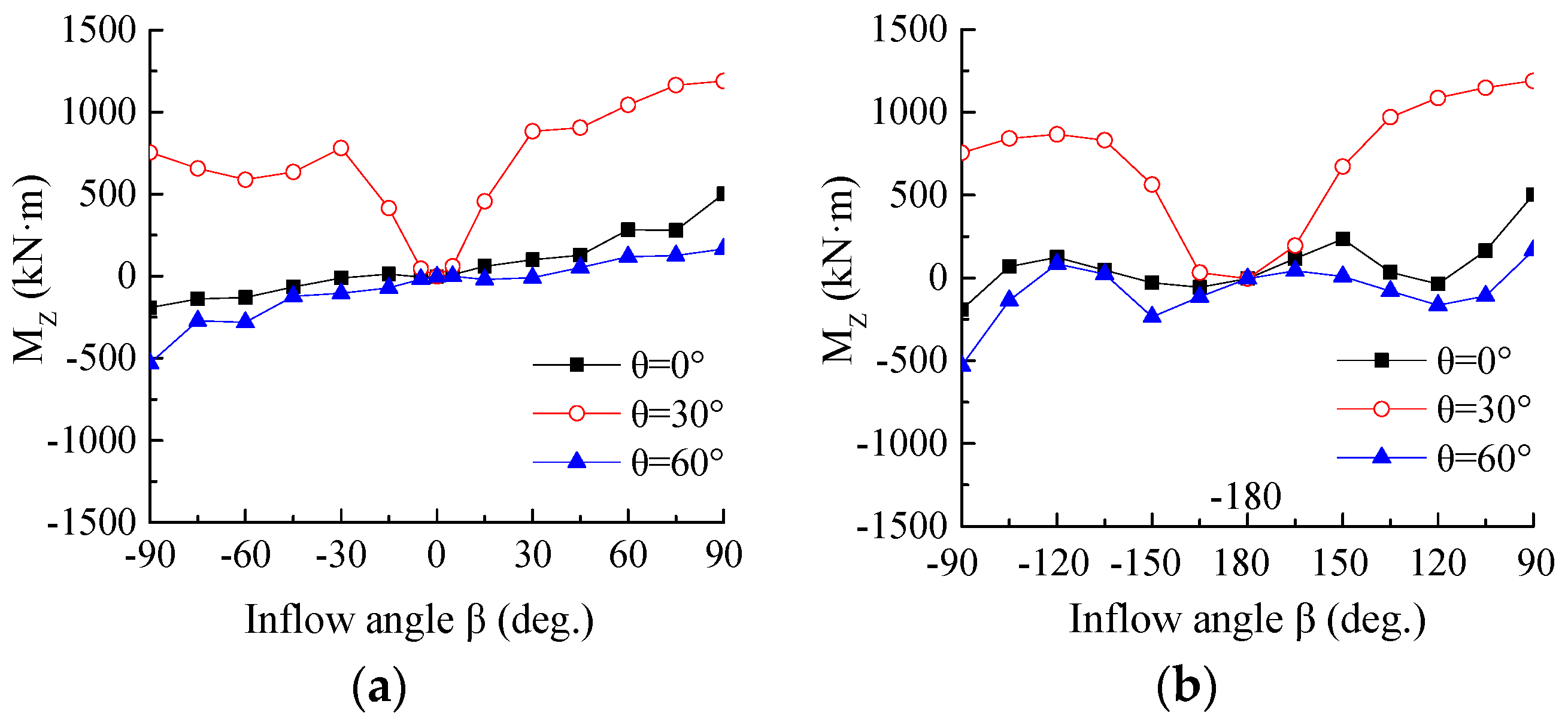
Figure 15 provides the curves of the average yawing moment
MZ varied with wind direction. Different from the wind torque or pitching moment, the yawing moment
MZ of the rotor in the θ = 30° parking position is much greater than that of the other two parking positions and surpasses 600 kN·m for almost all wind directions, reaching its maximum value of 1189.68 kN·m at the wind direction of β = 90°. This maximum was 2.38 and 2.24 times that of the other two parking positions, and reached approximately 53 times that of the rated operating state, which would make a large impact on the yaw control system, possibly resulting in damage. Moreover, in the range of small wind direction angles (−30° < β < 30° and 135°< |β| < 180°), the yawing moment
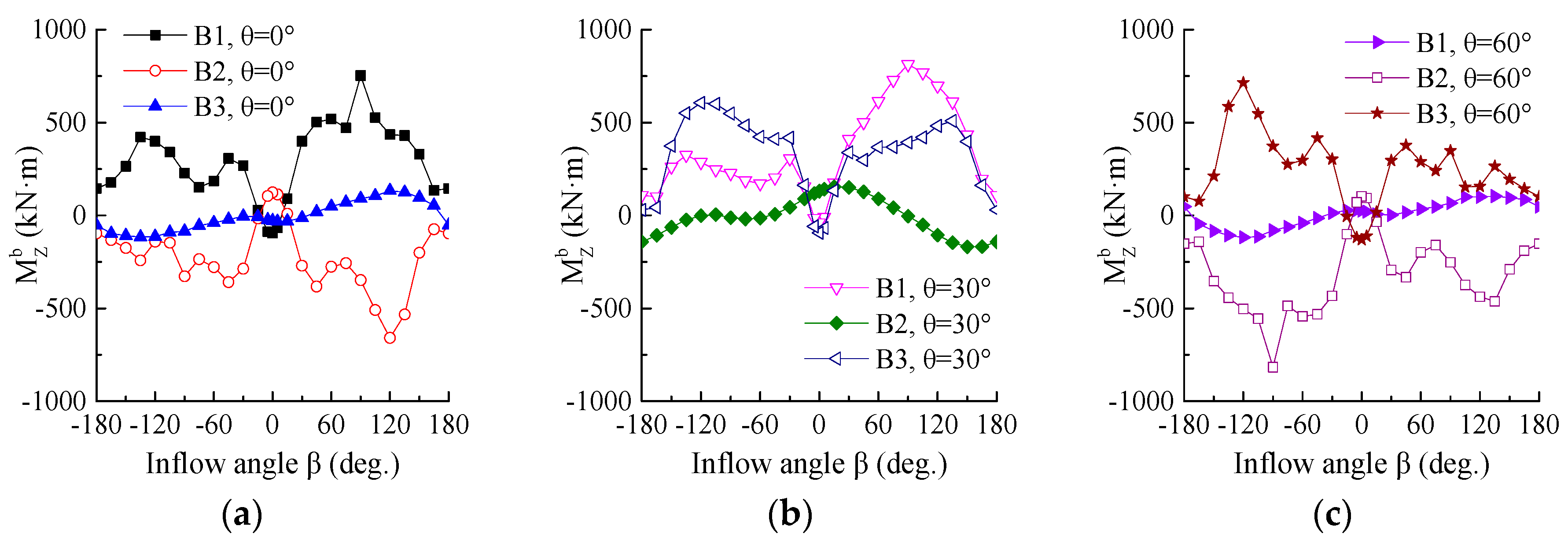
MZ of the rotor in the θ = 30° parking position was very sensitive to the wind direction changes, which dropped to zero quietly at the favorable wind direction (β = 0° or ±180°). The variation of the yawing moment can be further described in
Figure 16, which gives the contribution of each blade to the yawing moment. For wind rotors in the θ = 0° and θ = 60° parking positions, the moment
of the blade in the vertical position was approximately zero, and the moments
of the other two blades of the same rotor were similarly equal and opposite, therefore, the yawing moments of the rotors in these two parking positions were very small. In contrast, for the wind rotor in the θ = 30° parking position, the moments
of the three blades of the same rotor were almost in the same direction, resulting in the enormous yawing moment.
Based on the above characteristics of the yawing moment, it can be worthwhile to adopt the typhoon resistance strategy without electrical power, in order to avoid the yaw control system becoming inactive when the electric power network fails or the wind-measuring device breaks down under typhoon activity, i.e., starting the typhoon resistance strategy after the forecast of a typhoon, setting the blades in the feathering position, and loosening the yaw brake device to make the wind rotor act as a tail vane to achieve the free yawing. Comparing the different parking positions, the yawing moment of the rotor in the θ = 30° parking position was the greatest and very sensitive to wind direction changes, the intensity of which was enough to conquer the friction moment at the top of the tower, assuring the free yawing of the wind turbine with wind direction changes. Accordingly, these results suggest turning the wind rotor to the θ = 30° parking position, loosening the yaw brake, and the wind rotor will finally be adjusted to the favorable wind direction conditions (β = 0° or ±180°) under the function of the great yawing moment MZ. At this moment, it can significantly reduce the typhoon wind loadings on the wind rotor, and protect the safety of wind turbine structures.
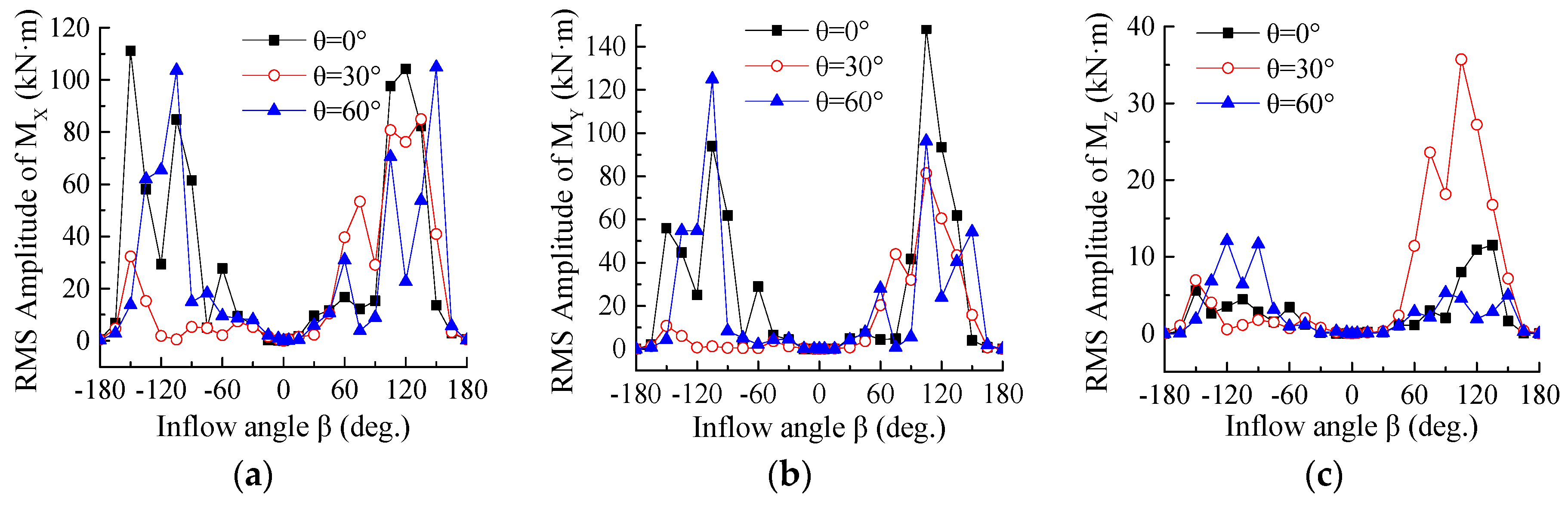
Figure 17 provides the RMS amplitude of the total aerodynamic moment. Similar to the total aerodynamic force, the peak RMS amplitudes of the wind torque and pitching moment also occurred in the range of |β| = 105°–150°, but the peak RMS amplitudes of the yawing moment occurred in the ranges of β = 75°–135° and −90°–−120°. Of those, the maximum of the RMS amplitude of the wind torque appeared in the θ = 0° parking position, which was 111.16 kN·m at the wind direction of β = −150°, 30.89% and 6.01% greater than that of the θ = 30° and θ = 60° parking positions, respectively; the maximum of the RMS amplitude of the pitching moment also appeared in the θ = 0° parking position, which was 148.29 kN·m at the wind direction of β = 105°, 82.17% and 18.57% greater than that of the θ = 30° and θ = 60° parking positions, respectively; the maximum of the RMS amplitude of the yawing moment appeared in the θ = 30° parking position, which was 35.74 kN·m at the wind direction of β = 105°, 3.11 and 2.95 times that of the θ = 0° and θ = 60° parking positions respectively. According to these results, under typhoon side wind, not only do the averages of the total aerodynamic moments increase by a large amount, the fluctuation intensity is also greatly augmented, which may cause accumulated damage of wind turbine structures under low-cycle fatigue.
For the wind rotor in the θ = 30° parking position, the average value and RMS amplitude of the wind torque and pitching moment were all smaller, but the average value and RMS amplitude of the yawing moment were far greater than that of the other two parking positions. Moreover, as shown in
Figure 17, it is clear that the effect of the interactions among the three blades of the wind rotor on the total loads is more significant in the θ = 30° parking position, which causes the RMS amplitudes of the total aerodynamic moments in the wind direction interval (−180°, 0°) to be much less than that in the wind direction interval (0°, 180°). In agreement with
Figure 5, for the wind rotor in the θ = 30° parking position, when the wind direction β < 0°, the downwind blade B2 has an obviously contraction effect on the trailing vortex of the upwind blades B1 and B3, which greatly improves the flow state around blades B1 and B3, obviously decreasing the fluctuating wind load. What is more, the RMS amplitude of the total aerodynamic forces of the rotor in the θ = 30° parking position had a similar variation characteristic, but it was not as significant as that of the total aerodynamic moments. Therefore, the θ = 30° parking position is the optimum for wind turbines that adopt free yawing strategy, especially when the wind direction β < 0°. However, the fluctuation amplitude of the yawing moment of the rotor in the θ = 30° parking position increases rapidly in the wind direction interval (0°, 180°), which will add great difficulties to the implementation of the free yawing strategy; meanwhile, the fast changing wind directions also increase the frequency of yawing, which will also produce fatigue loads on the wind turbine. Thus, it is very necessary to elaborately match the yaw dampers in the nacelle.
Table 3 gives the range of the dominant frequency of the total aerodynamic moment, which is basically the same as that of the total aerodynamic force. It requires that the natural frequency of the wind rotor be outside these ranges in design to avoid resonance failures.
4.3. Aerodynamic Loads of the Blade
The blade vibration characteristics are directly related to the blade root bending moments [
41], which are measured in the blade coordinate system {
XB,
YB,
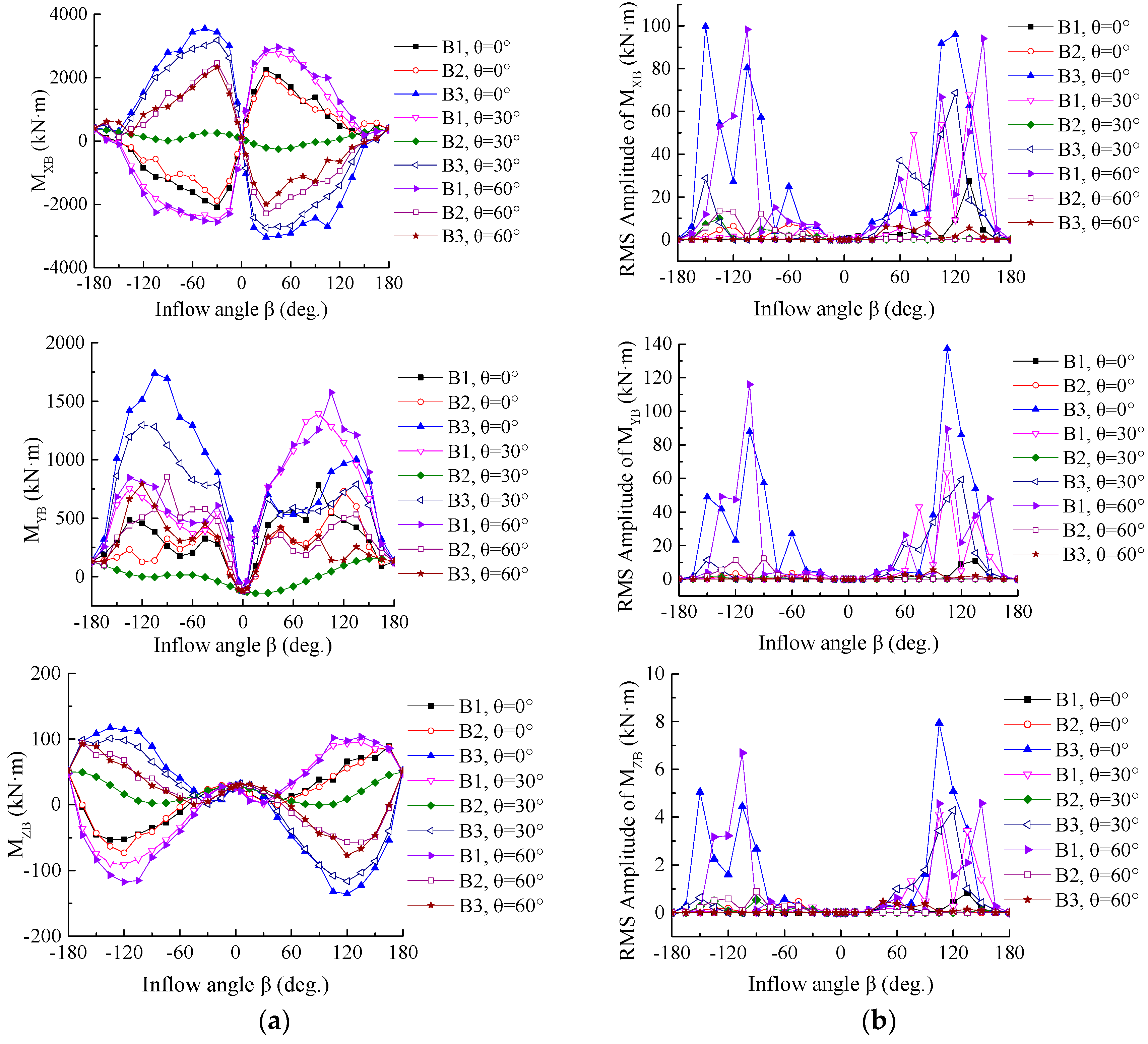
ZB}, as shown in
Figure 18. The blade root bending moments can be divided into the flap-wise moment
MXB, edge-wise moment
MYB and twisting moment
MZB. The flap-wise moment
MXB causes the flexural vibrations of blades in the direction perpendicular to the airfoil chord; the edge-wise moment
MYB causes the flexural vibrations of blades in the direction of the airfoil chord; and the twisting moment
MZB causes the twisting vibrations of blades around the longitudinal central shaft, which can be seen as the pitch moment.
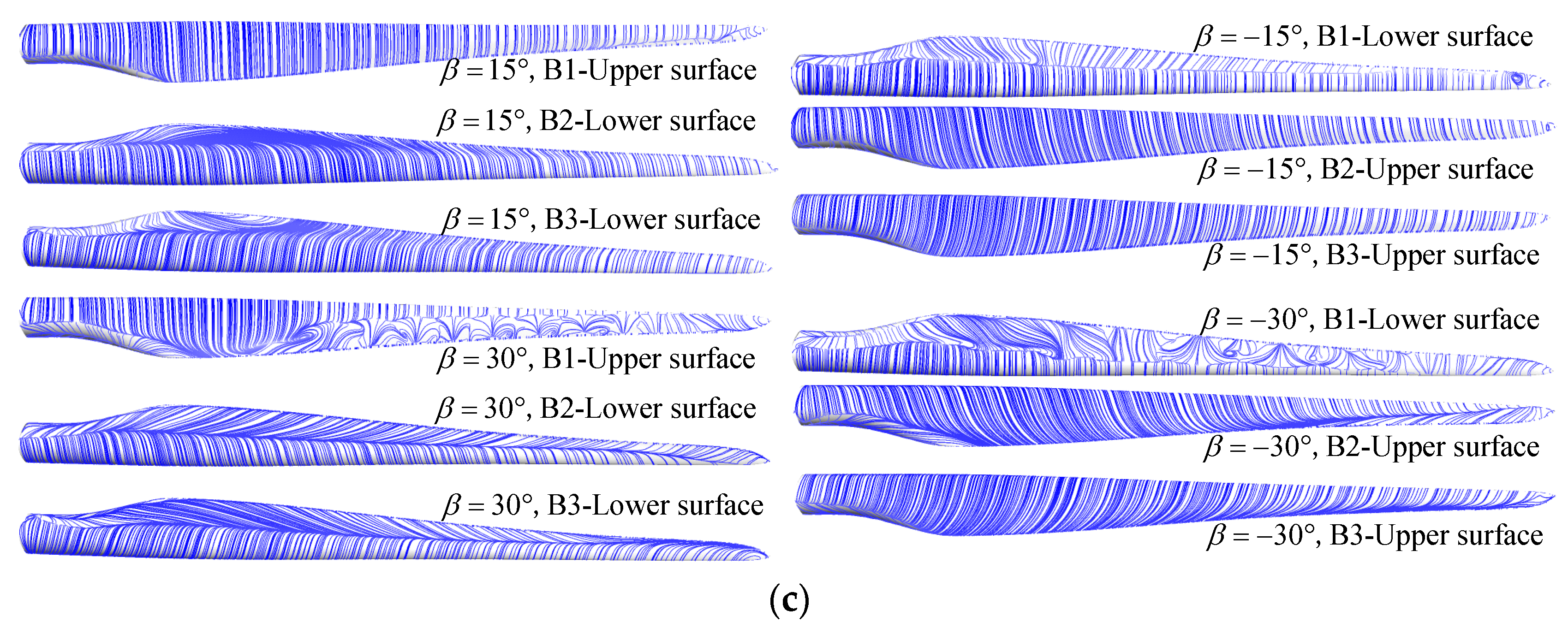
The variation of the average value of the flap-wise moment MXB with wind direction is similar to a sinusoidal distribution. In the range of small wind direction angles, there is no stall on the blade, so the flap-wise moment MXB rapidly increases with the increasing of the wind direction |β|; when |β| increases to a certain degree (30°–45°), a stall occurs, and then the flap-wise moment MXB begins to decrease with the increasing of the wind direction |β|. The RMS amplitude of the flap-wise moment MXB reached its maximum at the wind directions β = 60°–150° and −90°–−150°. For the wind rotor in the θ = 0° parking position, the average and RMS amplitude of the flap-wise moment MXB on blade B3 were greater, the maximum average of 3545.43 kN·m appeared at the wind direction of β = −45°, and the maximum RMS amplitude of 99.70 kN·m appeared at the wind direction of β = −150°; for the wind rotor in the θ = 30° parking position, the average and RMS amplitude of the flap-wise moment MXB on blade B3 were also greater, the maximum average of 3179.68 kN·m appeared at the wind direction of β = −30°, and the maximum RMS amplitude of 68.69 kN·m appeared at the wind direction of β = 120°; for the wind rotor in the θ = 60° parking position, the average and RMS amplitude of the flap-wise moment MXB on blade B1 were greater, the maximum average of 2960.10 kN·m appeared at the wind direction of β = 45°, and the maximum RMS amplitude of 98.32 kN·m appeared at the wind direction of β = −105°.
The average of the edge-wise moment MYB is significantly affected by the windward side of the blade. When the lower surface of the blade was facing the wind, the average edge-wise moment MYB was greater than that when the upper surface of the blade facing the wind. Moreover, similar to the total aerodynamic force FX, the edge-wise moment MYB acted in the negative direction only when β = −5°–5° because of the special aerodynamic form of the blade. For the wind rotor in the θ = 0° parking position, the average and RMS amplitude of the edge-wise moment MYB on blade B3 were greater, the maximum average of 1740.43 kN·m appeared at the wind direction of β = −105°, and the maximum RMS amplitude of 137.27 kN·m appeared at the wind direction of β = 105°; for the wind rotor in the θ = 30° parking position, the average and RMS amplitude of the edge-wise moment MYB on blade B1 were greater, the maximum average of 1393.16 kN·m appeared at the wind direction of , and the maximum RMS amplitude of 63.30 kN·m appeared at the wind direction of β = 105°; for the wind rotor in the θ = 60° parking position, the average and RMS amplitude of the edge-wise moment MYB on blade B1 were greater, the maximum average of 1576.00 kN·m appeared at the wind direction of β = 105°, and the maximum RMS amplitude of 116.07 kN·m appeared at the wind direction of β = −105°.
The plus or minus sign of the twisting moment
MZB that is used to indicate the direction is approximately identical to that of the flap-wise moment, as shown in
Figure 18. With the increasing of |β|, the twisting moment
MZB also increased first and then decreased, and the average value of the twisting moment
MZB at the wind direction of β = ±180° was more than double that at the wind direction of β = 0°. For the wind rotor in the θ = 0° parking position, the average and RMS amplitude of the twisting moment
MZB on blade B3 were greater, the maximum average of 135.40 kN·m appeared at the wind direction of β = 120°, which was 19.48 times that of the rated operating state, and the maximum RMS amplitude of 7.94 kN·m appeared at the wind direction of β = 105°; for the wind rotor in the θ = 30° parking position, the average and RMS amplitude of the twisting moment
MZB on blade B3 were greater, the maximum average of 116.17 kN·m appeared at the wind direction of β = 120°, which was 16.71 times that of the rated operating state, and the maximum RMS amplitude of 4.28 kN·m appeared at the wind direction of β = 120° as well; for the wind rotor in the θ = 60° parking position, the average and RMS amplitude of the twisting moment
MZB on blade B1 were greater, the maximum average of 117.32 kN·m appeared at the wind direction of β = −120°, which was 16.88 times that of the rated operating state, and the maximum RMS amplitude of 6.69 kN·m appeared at the wind direction of β = −105°. Thus, the design process of the pitch control system must consider not only the requirement of normal pitch control but also resistance to the twisting moment in side wind of typhoon, in order to prevent blades from being rotated into an operation position with a small pitch angle under the huge twisting moment, in that case, wind turbines may be running at high speed even if they are in braking status, which will result in the brake disks shattering, even causing the disintegration of the wind turbine. Moreover, it also should try to improve the torsional rigidity of the blades to avoid the torsional divergence in large attack angle conditions.
As stated above, the blade root bending moment is different in different positions. The blades in the vertical position are the most risky under typhoon activity, and the average values and RMS amplitudes of the flap-wise moment, edge-wise moment and twisting moment on them are all greater than the other blades. In addition,
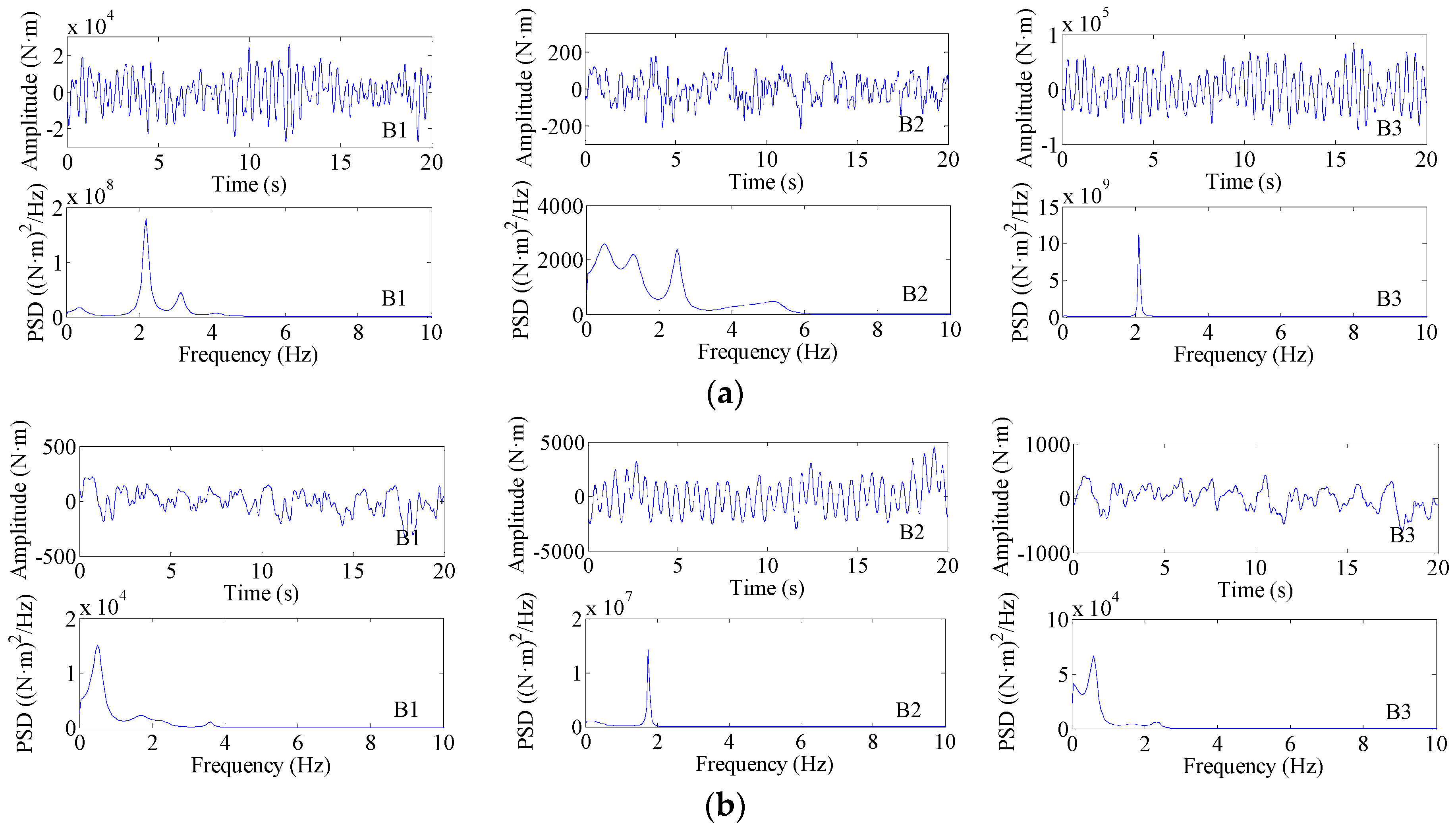
Figure 18 also shows the interactions among the three blades of the wind rotor, and it is mainly embodied in the RMS amplitude of the blade root bending moment, among which the most significant are blades of the rotor in the θ = 30° parking position. When the wind direction was in the range of β < 0°, the downwind blade B2 had an contraction effect on the trailing vortex of the upwind blades B1 and B3, making the fluctuating wind loads of the two blades obviously decrease, while the fluctuating wind load of blade B2 was always a small value because of its favorable horizontal position, thereby lowering the fluctuating wind loads acting on the whole wind rotor.
Figure 19 provides the time-domain waveforms and the frequency spectrograms of the edge-wise moment of the wind rotor in the θ = 30° parking position, from which we can observe clearly the improvement of the load state on blades B1 and B3 by blade B2.
Table 4 gives the range of the dominant frequency of the blade root bending moment, and it requires that the natural frequency of the blade be outside these ranges in design to avoid resonance failures. It also shows that the interactions among the three blades of the wind rotor have an effect on the dominant frequency of the blade wind loads as well, which can cause high dominant frequency to occur on the upwind blade.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}