1. Introduction
Recently, distributed generation (DG) has attracted more attention due to the perceived advantages of easy integration of resources, high energy utilization efficiency, flexible installation location, and low power transmission losses [
1,
2]. Therefore, DG penetration in the main grid has gradually increased, and may potentially be a future trend in electric power system development [
3].
As an effective carrier of distributed energy, a microgrid consists of various DG units, energy storage (ES) devices, energy conversion devices, protections, and load monitoring devices. These DG units always possess a higher degree of controllability and operability compared to conventional generators [
4,
5,
6]. Resulting from these features, a microgrid could play a critical role in maintaining the stability of the electrical networks [
7,
8,
9]. Among various DGs, photovoltaic (PV) generator has emerged as major DG source in power grids [
10].
The power supply quality of an alternating current (AC) microgrid is significantly influenced by intermittence and fluctuation of the distributed power. Moreover, a number of AC-distributed resources are connected to the microgrid through a multi-stage conversion controller, which lowers the system efficiency to some extent [
11,
12,
13,
14,
15]. As an alternative to an AC microgrid, a direct current (DC) distribution microgrid has several attractive features and is developed in [
16,
17]. First, the DC microgrid allows easier integration of DGs, requiring lower conversion stages. Second, the power quality is enhanced as the harmonic distortion and synchronization issues are inherently eliminated. Especially, the complexity of its control system is greatly reduced when compared with the AC system. The DC microgrid has a low installation and operation cost. However, DC microgrid has a potential disadvantage in that it is not suitable for the rural low voltage networks due to their large line resistance.
For a DC microgrid powered by PV generator and battery, the AC adaptors of common portable electronic devices could work properly through reasonable selection of control parameters. However, for a single AC or DC microgrid, a multistage conversion is needed due to the different AC/DC types of DGs and loads. The complexity is increased and the efficiency is reduced. To facilitate the integration of AC- and DC-type loads, hybrid AC/DC microgrid architecture has been extensively investigated [
18,
19,
20,
21,
22,
23]. On one hand, the DC and AC type loads are directly fed by the DC- and AC-side microgrid, respectively. On the other hand, the interlinking converter (IC) provides bidirectional energy transfer between the DC and AC subgrids, depending on their individual supply demand conditions. Meanwhile, the plug-and-play function is realized by controlling the power electronic converters.
This paper focuses on power control strategies of a hybrid microgrid in islanded mode. In a previous study, the master-slave control method is adopted in [
24], which requires the communication between the master and slave controller. The master node is still a single point-of-failure. There have been some other power flow management methods based on communication [
25,
26]. In [
25], a centralized controller is proposed to generate a compensation signal of primary layer. Thus, an accurate and optimized power exchange between two subgrids is provided. In [
26], a three-level hierarchical control for parallel ICs between AC bus and DC bus in a hybrid microgrid is presented. The bus voltage deviation caused by the droop control in the primary control level is restored, and proportional current sharing is accomplished. However, the external communication would increase the investment cost and reduce reliability and expandability of the system.
To overcome this drawback, decentralized control strategies without communication are preferable. Autonomous operation of a hybrid microgrid is investigated in [
15] and extended in [
20,
27]. Firstly, reference [
15] proposes a droop control strategy for controlling the ICs by a normalized bidirectional droop scheme. Proportional active power sharing can be enforced based on ratings. However, the principle proposed in [
15] causes the continuous action of IC during any slip DG or load power variations, leading to more power loss. In [
27], an ES system is linked to the DC terminal of the IC, and proper charging and discharging of ES is demonstrated. In [
20], an efficient power flow control scheme is presented for hybrid microgrid with progressive energy flow tuning. It allows energy flow across the IC only when one subgrid is over-loaded and the other subgrid is light-loaded. Moreover, reference [
28] proposes a fully decentralized control to achieve local power sharing (LPS) in an individual AC or DC network, global power sharing (GPS) throughout AC/DC networks and storage power sharing (SPS). The intended outcome is to activate as few power converters as possible, in order to avoid their operating losses. Although the various conditions are well designed, the associated mode switching among LPS, GPS, and SPS is slightly complex and easy to lose stability. Moreover, it should not be ignored that both the AC- and DC-distributed generators are treated as ideal power source, which does not consider the characteristics of DGs in [
15,
20,
27,
28].
There are also some models and control methods that involve integrating the actual distributed resources. Typically, a model of a hybrid microgrid is studied in [
29] based on the Wind-PV-ES units. The equivalent circuit of the whole system is developed in both isolated and grid tied modes. However, the operating principle of an IC is not practical to coordinate both of the subgrids. References [
30,
31,
32] propose a control strategy of
Vg/
VDC droop and
P/
VDC anti-droop control strategy for PV panels. It avoids frequent energy fluctuation and improves the quality of output voltage, but does not take into account the coordination control of multiple DG units. For the optimal operation of hybrid microgrid [
33,
34], a simple algorithm is developed to determine the required sizing of generating units and the associated storage capacity in [
33]. However, it requires the state of charge information of the battery in real-time.
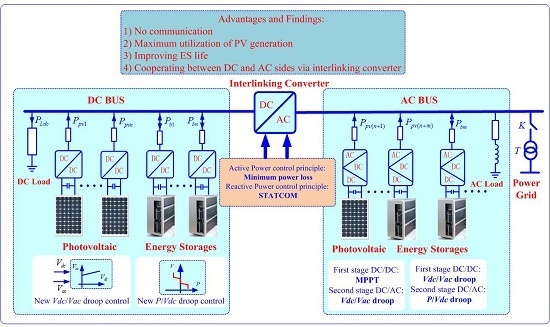
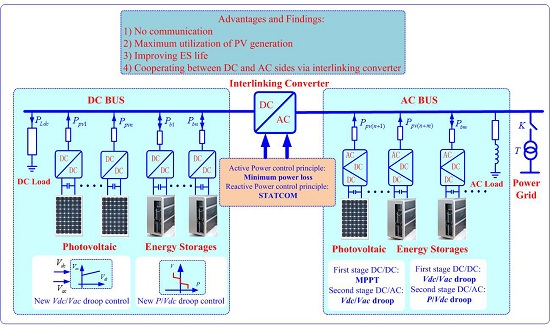
In this paper, a coordinated power control paradigm is proposed in a hybrid microgrid by considering the characteristics of DG units and designing the effective principle of an IC. The potential advantages are summarized below:
- (1)
Power flow control is realized in a fully decentralized manner.
- (2)
To harness the maximum power of PV units, a modified droop control is proposed.
- (3)
To prolong the lifetime of ES, a novel droop control incorporating a constant power band is presented.
- (4)
To improve the system efficiency, an effective principle of an IC is developed to coordinate both AC and DC subgrid microgrids.
This paper is organized as follows: in
Section 2, this work starts with a hybrid microgrid architecture based on PV and ES. In
Section 3, the
VDC/
VAC droop control strategy and its combination with
P/
VDC droop control are presented, as well as their characteristics. Then, the strategy of the IC is introduced in
Section 4. Simulation results with these control principles are shown and discussed in
Section 5. Finally,
Section 6 presents the conclusions.
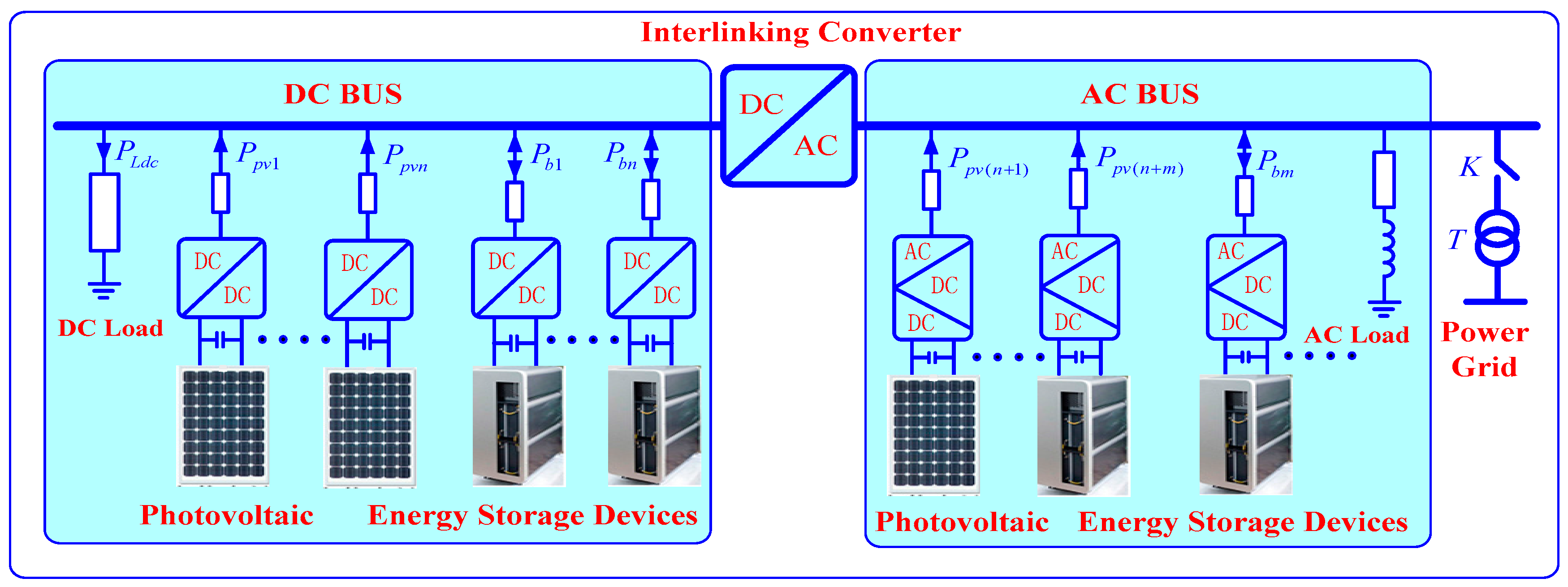
2. System Structure
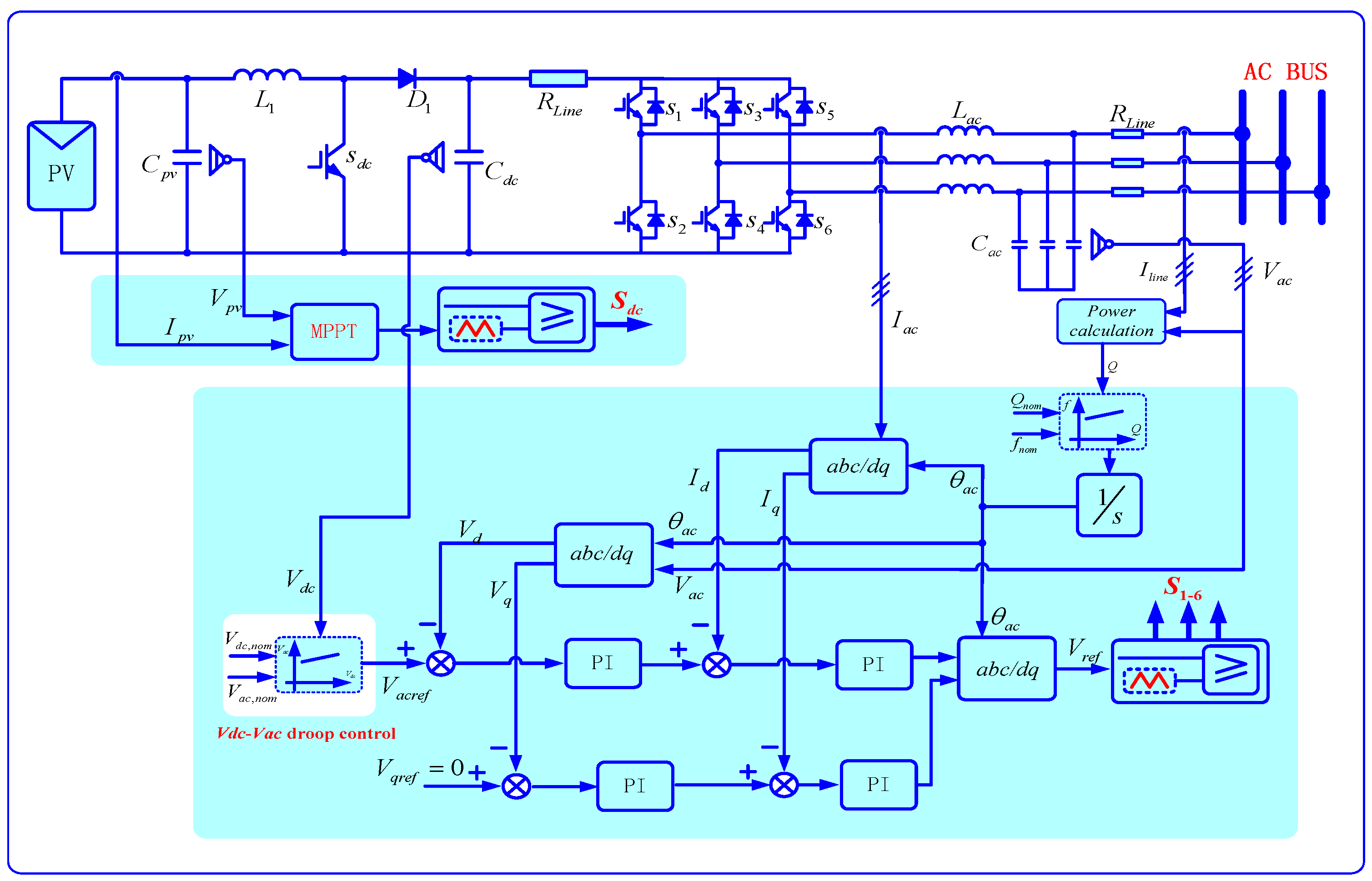
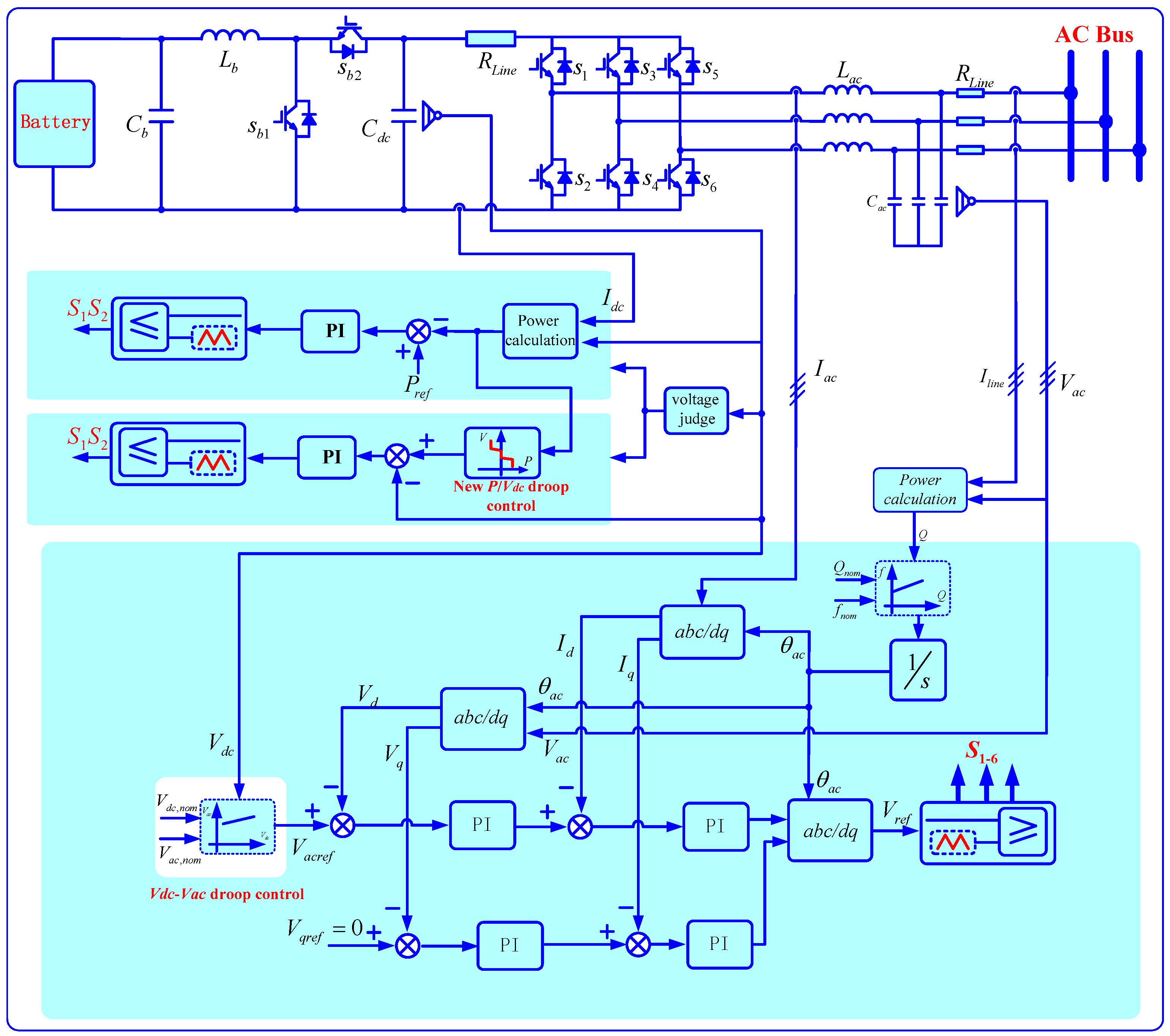
Figure 1 shows a hybrid microgrid formed by an AC microgrid and a DC microgrid. Each microgrid has its own PV sources, storages, and the same of type loads grouped together in order to minimize the amount of power conversion. PV sources of DC system are connected to a DC bus through a DC/DC boost converter, while the storage device is linked by a DC/DC buck-boost converter [
11]. On the other hand, the PV and storage generation of AC system are connected to AC bus through a cascaded DC/DC/AC converter [
34,
35,
36].
Regardless of the number of ICs, their role is to provide bidirectional energy transfer between two sides, depending on their prevailing internal supply-demand conditions [
15]. Furthermore, a hybrid microgrid can be tied to the AC main grid through an intelligent transfer switch. This switch would stay on under a normal grid-connected mode. If the main grid is strong with sizable capacity, the supply-demand power balance of hybrid microgrid can be guaranteed by the main grid. When a fault is sensed in the main grid, the transfer switch would turn off, forming an autonomous hybrid microgrid [
27].
For the islanded mode of hybrid AC/DC microgrid, control strategies and power management schemes are the critically important tasks. The power management strategies determine the output active and reactive powers of DG and ES units, and control the voltage and frequency at the same time. Details of the strategies for the different types of DGs and ES units are explained in next section.
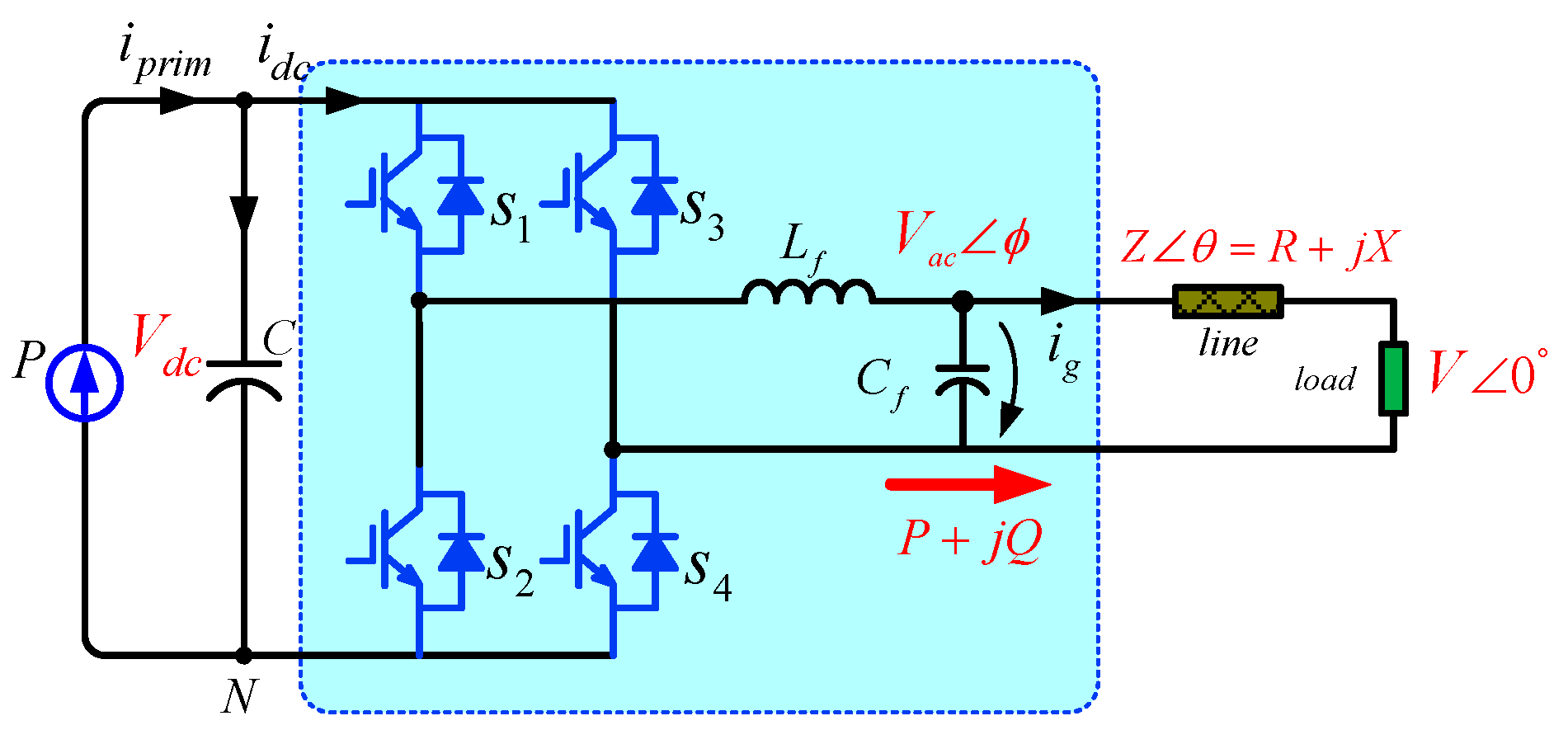
4. Proposed Power Control Strategy for the Interlinking Converter
As a common bridge of connecting AC/DC buses in a hybrid microgrid, ICs play an important role when the hybrid microgrid operates under varying generation and load conditions. Therefore, designing the control mechanism and timing of energy transmission is the key to controlling the IC. In this paper, the principle of minimizing power transfer between the sub-grids is designed to guarantee the overall system efficiency.
If one of the AC/DC sub-grids is capable of providing the load by itself while the other cannot provide the demanded load fully, the active power control of the IC is activated. On the other hand, another scenario is permissible whereby both sides are capable of individually charging the storages without a triggering energy transfer. Therefore, operating losses of the IC are avoided, resulting in a higher overall system efficiency. Regarding the reactive power, if the AC microgrid does not satisfy the reactive power demand, the reactive power control for IC can operate as a static synchronous compensator (STATCOM) to satisfy the demand. Thus, the
Q-
f droop control strategy can be applied in reactive power sharing [
37].
To realize the above scenarios physically in mathematical formulations, the appropriate amount of charging power is first determined. When the active power flow of the AC/DC bus exceeds 80% of the overall power capacity, the energy transmission indicator
G(AC) or
G(DC) is set as follows:
where
PAC and
PDC are the provided active powers by the AC-side and DC-side, respectively; and
PAC,max and
PDC,max are the maximum active power demand of the two sides, respectively. Equations (7) and (8) show that because one side has surplus energy, the energy transmission channel between the two sides can be opened by the controller setting. So, the energy transmission indicator is set as 1. Otherwise, when one side is not enough, the energy transmission channel is closed. The energy transmission indicator is set as 0.
When one side has surplus energy, the other side cannot provide the load demand fully, the control mechanism is just activated. Thus, the active power reference of the IC is described as:
where “×”means the logical operator “AND”,
λAC and
λDC are the AC/DC transmission coefficients, and (
PDC − 0.8
PDC,max) and (
PAC − 0.8
PAC,max) indicate the actual power demand shortfall of the DC- and AC-side microgrids, respectively. That is, Equation (9) shows that the IC needs to compare the energy transmission of both sides, and then the active power
Pic,ref can be fixed. In order to ensure that the active power demand is not more than the maximum output active power on the other side, the AC/DC transmission coefficients λ
AC and λ
DC should be chosen as follows:
According to Equation (10), if the AC-side is capable of providing the active power demand fully and has a great surplus, then the DC-side transmission coefficient λ
DC is given by:
Likewise, the AC-side transmission coefficient λ
AC is given by:
where “<<” is the mathematical operator “far less than”. The AC/DC transmission coefficients λ
AC and
λDC represent the transfer capability. A specific example is used here for further illustration. When the DC-side microgrid has 0.9 pu power flow of its maximum active power, the energy transmission indicator
G(DC) would be chosen as 1. Meanwhile, the AC-side microgrid has 0.2 pu power flow of the maximum active power (
G(AC) = 0). Then, active power control of the IC is activated, and the DC-side transmission coefficient λ
DC = 0.6
PAC,max/(0.1
PDC,max + 0.6
PAC,max) < 1. Thus, it guarantees that the IC power reference
Pic,ref = λ
DC × 0.1
PDC,max does not exceed the maximum available power 0.6
PAC,max from the AC-side microgrid.
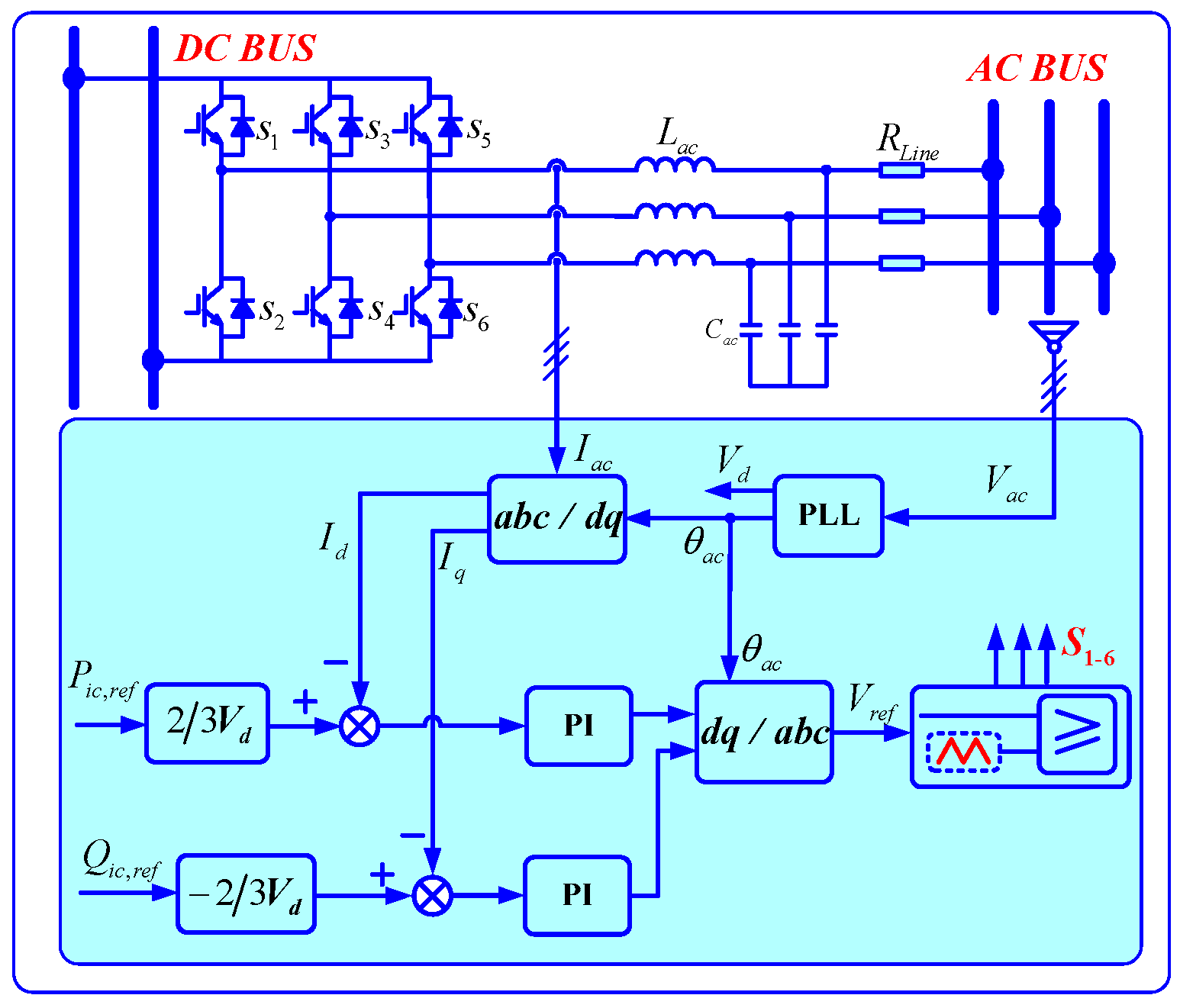
When the AC microgrid does not satisfy the reactive power demand, the IC can act as a STATCOM. Thus, the reactive power reference can be set by modified Equation (5) as follows:
where
Qic,ref is the reactive power demand of the AC-side in hybrid microgrid, and
Q* is the rated reactive power capacity of IC.
f is the operation frequency of AC-side microgrid, which is collected by a phase locked loop (PLL). The final control diagram of the IC is shown in
Figure 8.
5. Simulation Results
In order to verify the effectiveness of the proposed coordinated control strategy, the simulation model of the hybrid AC/DC system has been built in Matlab/Simulink, and the layout is shown in
Figure 1. The hybrid system includes two ES units, one PV generation, and some AC type variable loads in the AC-side microgrid, and has two PV generations, two ES units, and some DC type loads in the DC-side microgrid. The parameters of the hybrid microgrid in this study are given in
Table 1. The simulation conditions of the four cases are configured by mimicking the actual operation circumstances of the power system. Especially in the initial conditions, the microgrid operates at no-load to set up a fundamental voltage. After the system is up and running, the PV and ES are turned on. Various test conditions and associated results are presented and discussed below.
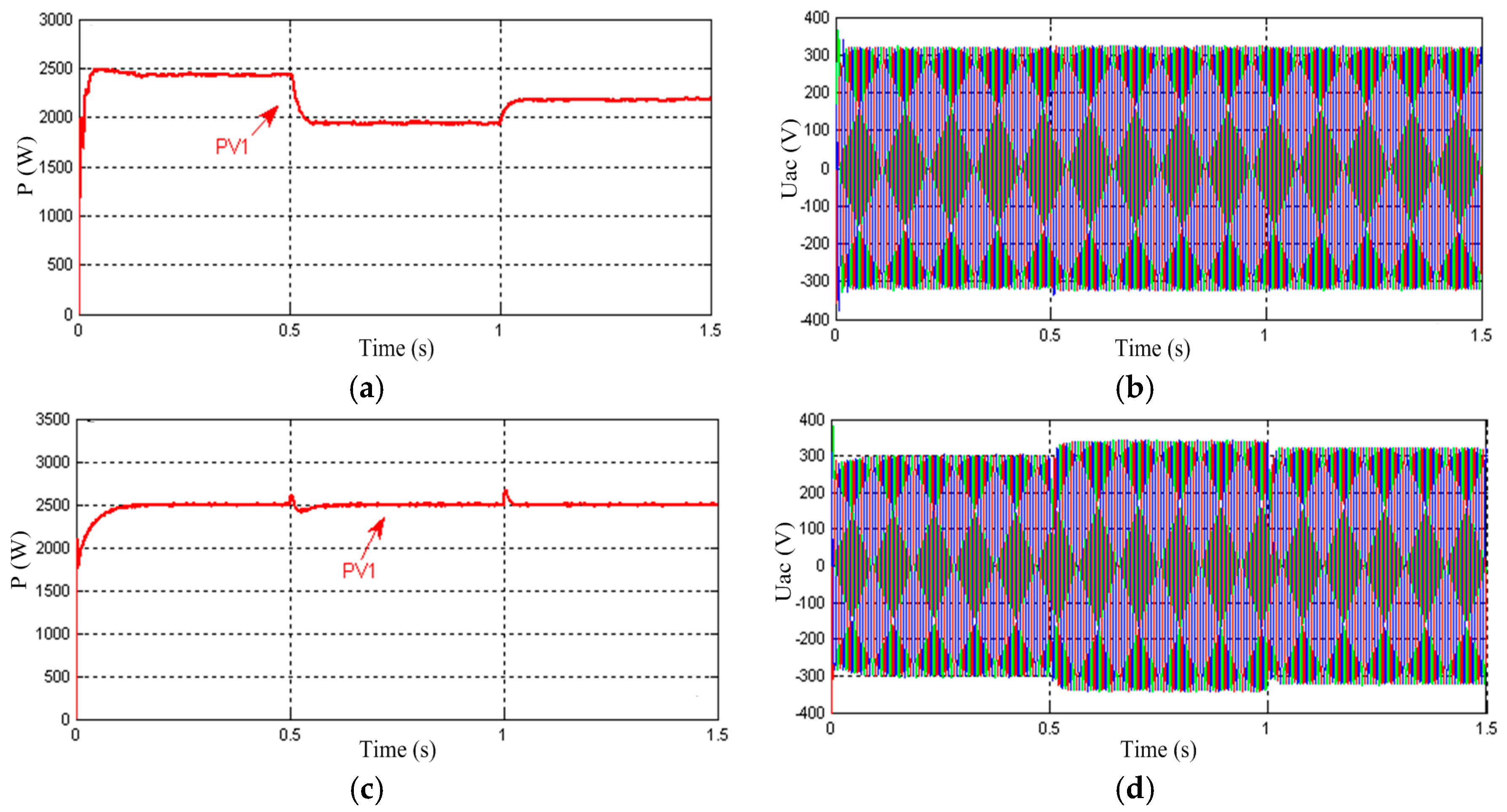
5.1. Case 1: Test of the Proposed Droop-1 Control Strategy for Photovoltaic
To verify the performance of the proposed Droop-1 control, the simulation model and control scheme are established as shown in
Figure 2 and
Figure 4. The AC load decreases by about 0.5 kW at
t = 0.5 s, and increases by about 0.2 kW at
t = 1.0 s.
Figure 9 shows the output active power and AC voltage waveforms of PV without Droop-1 control and with Droop-1 control, respectively.
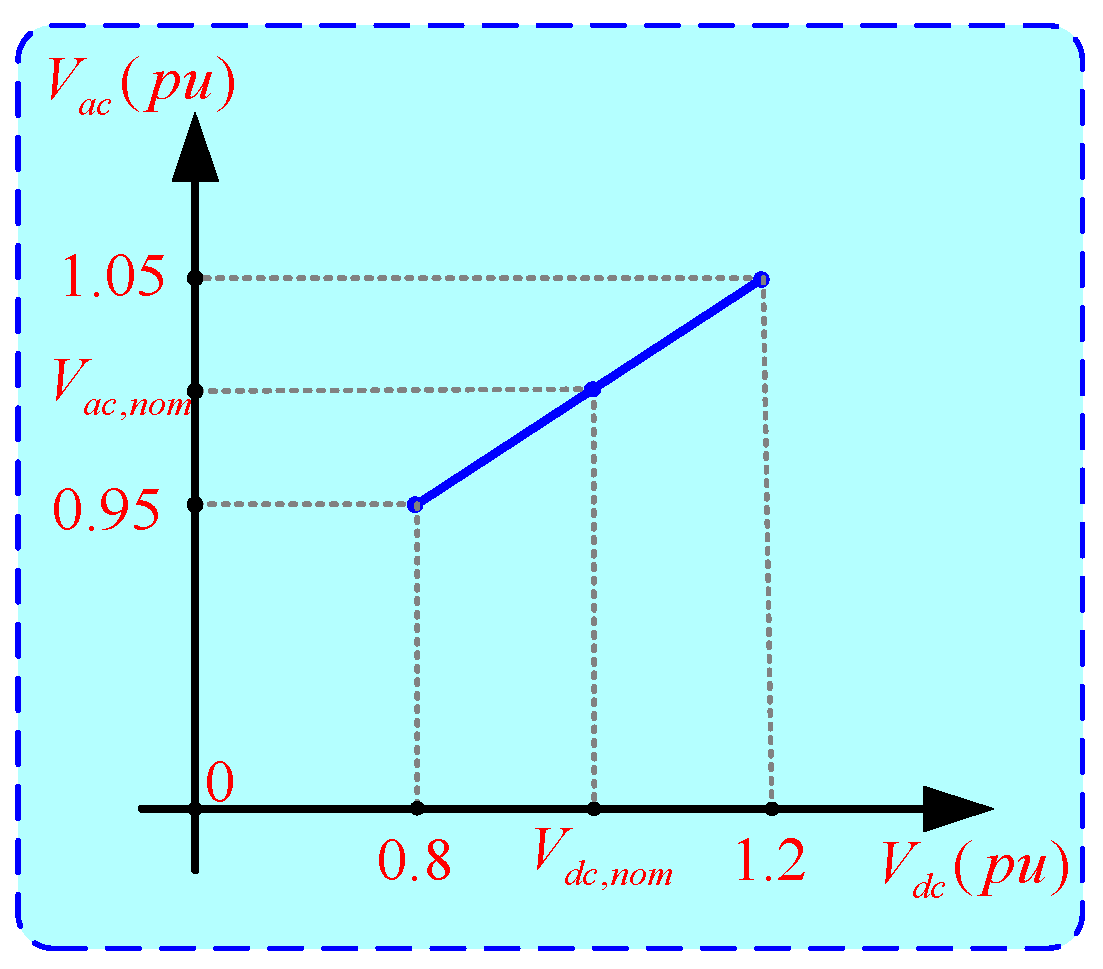
Figure 9a,b shows that the output power of PV varies with the load change, and that the voltage is almost same. When Droop-1 control is adopted, the acceptable voltage deviation (±5%) from its nominal value is highly utilized. From
Figure 9c,d, PV always works at the maximum power tracking point subject to the slip load change. Thus, frequent power regulation is avoided, and the characteristic of PV is fully considered.
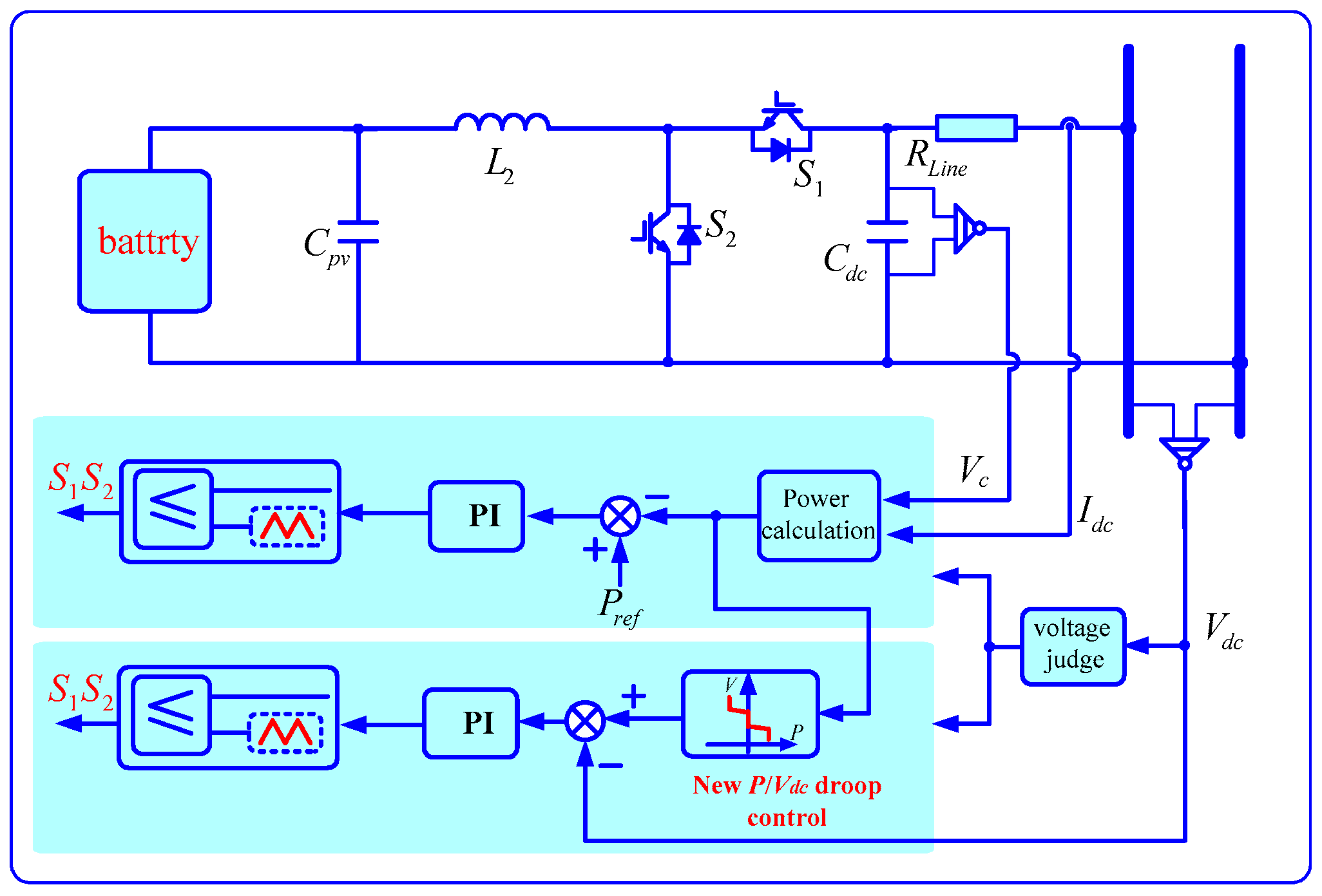
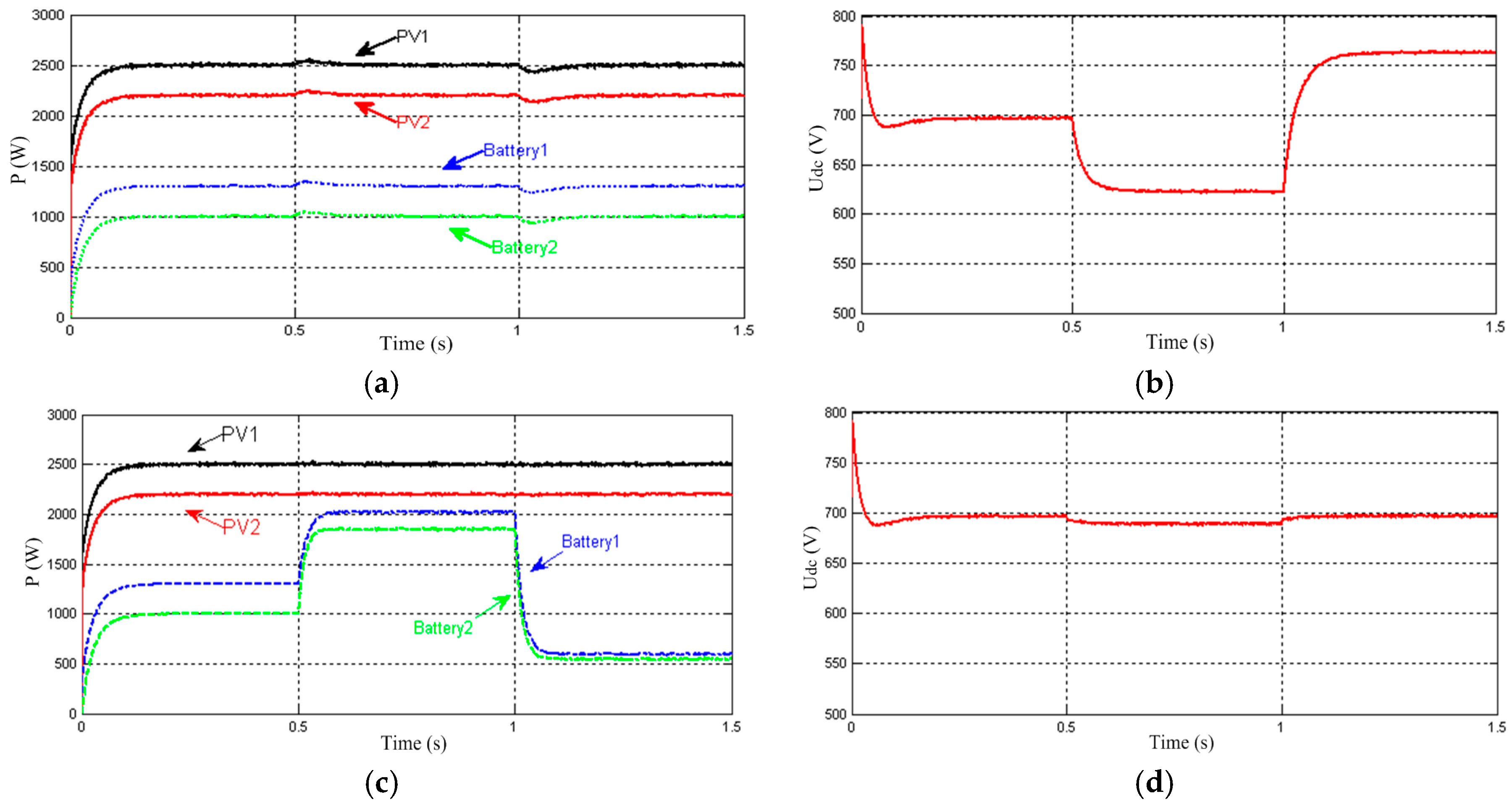
5.2. Case 2: Test of the Proposed Droop-2 Control Strategy for DC-Side Microgrid
In this case, in order to test the performance of the proposed Droop-2 control method, the DC load increases by about 1.5 kW at t = 0.5 s, and decreases by about 2.7 kW at t = 1.0 s. Two PV generations (PV1 and PV2) on the DC-side operate in parallel with the MPPT control, and the proposed Droop-2 control method is performed on two battery units.
Figure 10a,b shows the output active power and DC bus voltage waveforms with the conventional constant power control method. There is quite a large DC bus voltage deviation (±10.7%) when the DC loads change. The obtained voltages exceed the voltage limits since no power flexibility is incorporated in the control. Therefore, the proposed Droop-2 control controller is included in the next simulation.
From
Figure 10c,d, the Droop-2 controller forces the voltage closer to the nominal value of 0.7 kV. When the DC load increases at the time interval
t [0.5, 1.0], the proposed Droop-2 control strategy detects the bus voltage, and the battery switches to droop control strategy in order to share the load. The detailed results are shown with
VDC = 0.68 kV,
PPV1 = 2.5 kW,
PPV2 = 2.2 kW,
Pb1 = 2.0 kW, and
Pb2 = 1.8 kW. When the load decreases at the time interval
t [1.0, 1.5], the results are obtained with
VDC = 0.69 kV,
PPV1 = 2.5 kW,
PPV2 = 2.2 kW,
Pb1 = 0.6 kW, and
Pb2 = 0.5 kW, and the voltage limit violation is avoided. Therefore, the effectiveness of the proposed Droop-2 control method is verified.
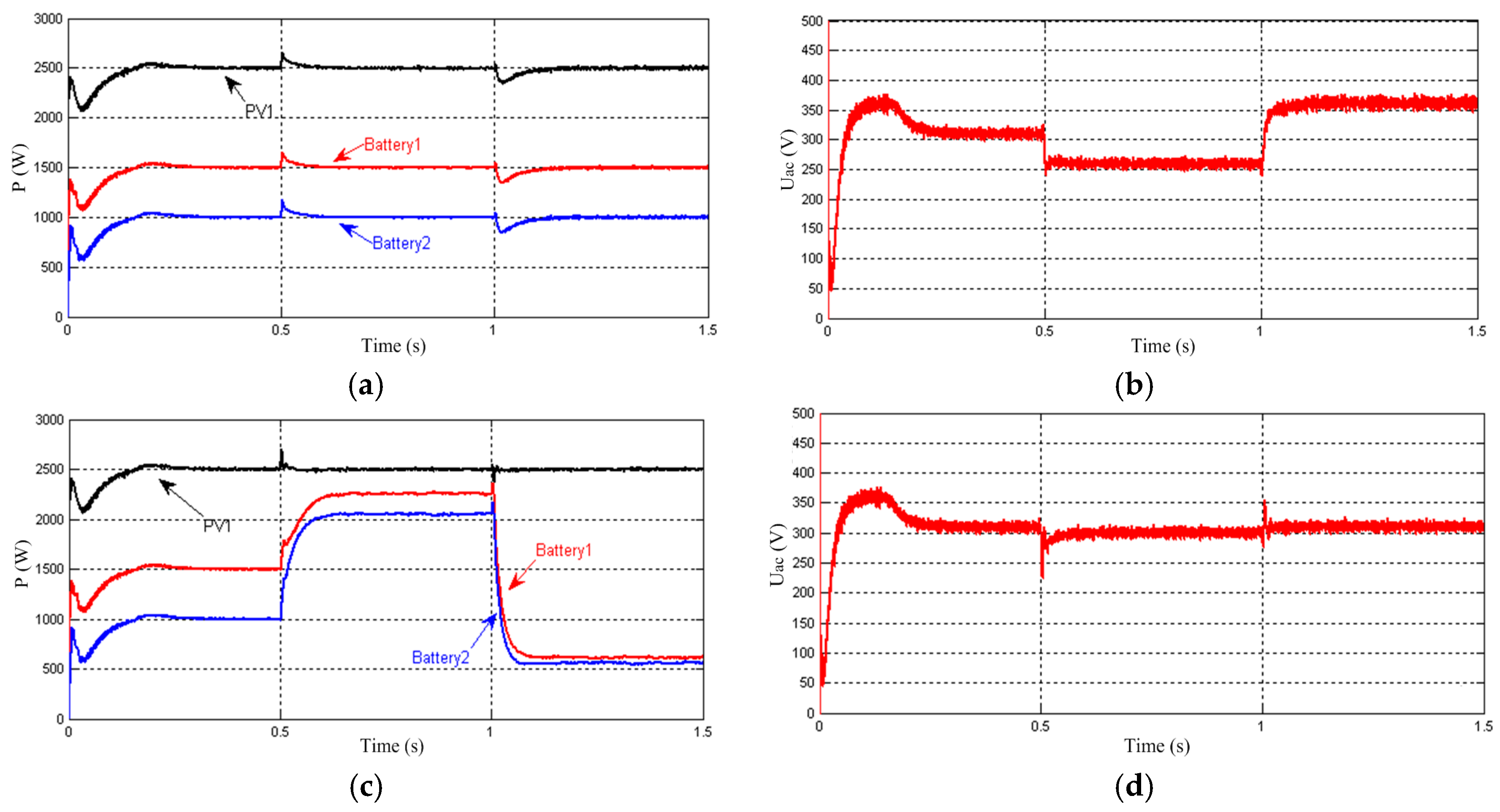
5.3. Case 3: Test of the Proposed Droop-1 Control Strategy and Droop-3 Control for AC-Side Microgrid
To test the performance of the proposed Droop-1 and Droop-3 control, the AC load increases by about 1.8 kW at t = 0.5 s, and decreases by about 2.2 kW at t = 1.0 s. The PV1 generation in AC-side adopts Droop-1 control, and the proposed Droop-3 control method is applied to two battery units in this case.
Figure 11a,c shows the output active power waveforms with the conventional constant power control method and the proposed Droop-1 and Droop-3 control strategies, respectively. Compared with
Figure 11a,c reveals that PV1 generation keeps the constant power mode, while Batteries 3 and 4 operate in parallel to match changing the AC load. As can be seen in
Figure 11d, the AC bus voltage nearly maintains its nominal value, while a great voltage deviation (±16%) occurs as shown in
Figure 11b. Therefore, it is concluded that in the case of over-voltage or under-voltage, regulating
P by the
P/
VDC droop control indeed benefits the microgrid control. It should be noted that when choosing a smaller constant-power band, the microgrid voltage would be closer to the nominal value.
From this case, it is concluded that the Droop-1 controller obtains a stable operation of the hybrid microgrid, avoids frequent power changes, and fully exploits the control capability of the power sources by setting the constant-power band. At the same time, Droop-3 control guarantees power sharing according to the ratings of the ES units and limits the voltage under no inter-unit communication.
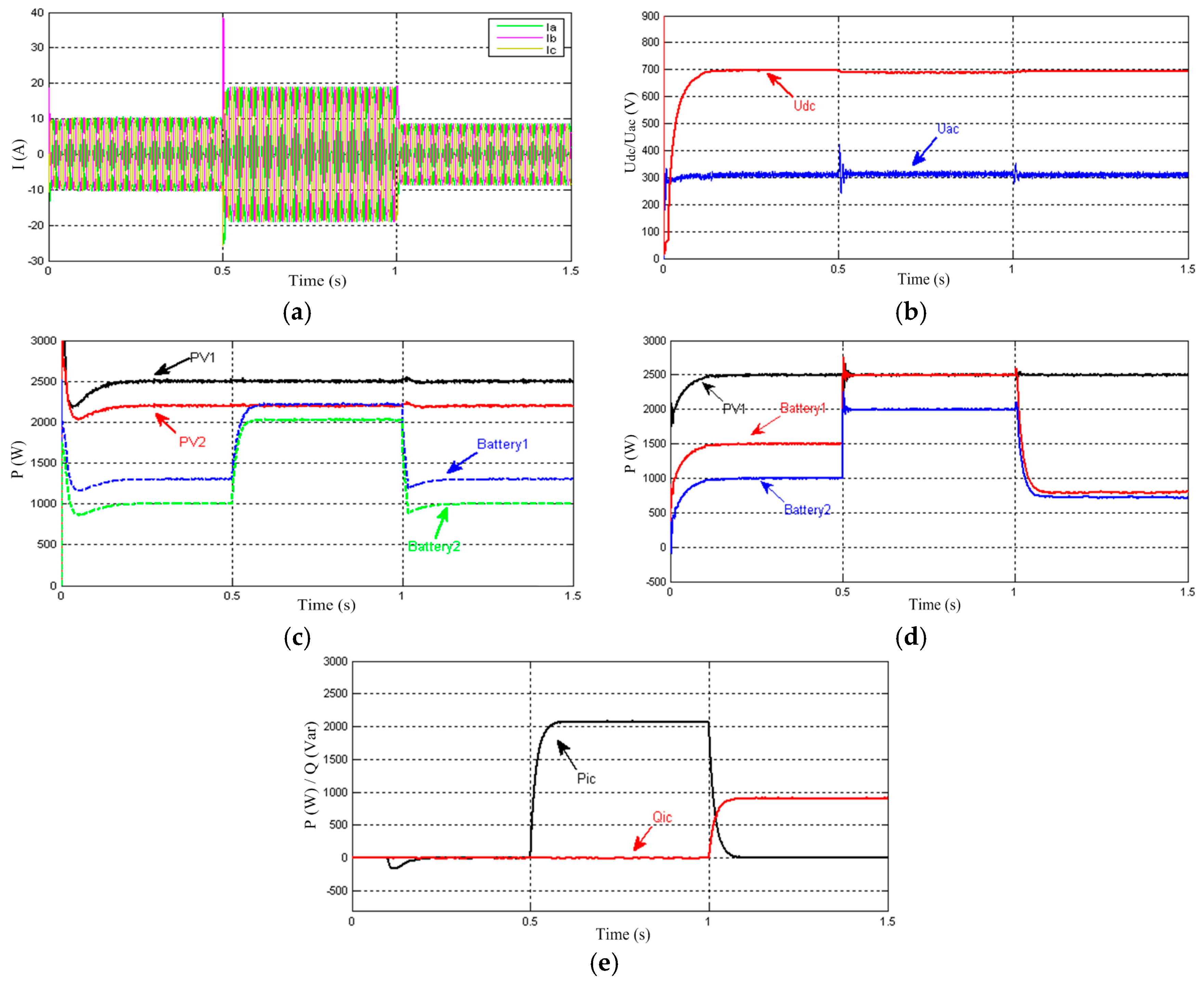
5.4. Case 4: Test of the Proposed Control Strategy for Interlinking Converter and Overall Hybrid Microgrid
To verify the overall system responses, the proposed control strategy of the IC is applied. The AC load increases by about 3.5 kW at t = 0.5 s, leading to an excess of the AC-side capacity. Furthermore, the active power on AC-side decreases about 4.5 kW, and reactive power increases by about 1.0 kVar at time t = 1.0 s. Notice that the DC load has remained constant.
Figure 12a,b shows the load current and the AC/DC bus voltage waveforms with the proposed control method. It can be seen that the bus voltages are close to the rated value. Then, the strong voltage regulation ability is obtained. The active power and reactive power of all units in hybrid system are shown in
Figure 12c,d. At the first stage
t [0, 0.5], all units operated with
PPV1 = 2.5 kW,
PPV2 = 2.2 kW,
Pb1 = 1.3 kW, and
Pb2 = 1.0 kW on the DC-side. The active power control mechanism of the IC is disabled, and thus operating losses are avoided. When the AC load changes at
t = 0.5 s, exceeding the AC bus capacity, and the DC-side has power remaining, the IC is activated with the power transmission
Pic = 2.0 kW,
Qic = 0 kVar,
PPV1 = 2.5 kW,
PPV2 = 2.2 kW,
Pb1 = 2.3 kW, and
Pb2 = 2.0 kW on the DC-side. However, the AC-side PV1 controlled with the MPPT mode keeps constant output power, and the Batteries 3 and 4 with Droop-3 controller have reached the capacity limit. The detailed results are shown with
PPV1 = 2.5 kW,
Pb3 = 2.5 kW,
Pb4 = 2.0 kW on the AC-side, as seen in
Figure 12c,d. After
t = 1.0 s, the active power is reduced to the capacity range of the AC-side so that the AC/DC sides can meet the load demand and the active power control of the IC is not enabled. As can be seen in
Figure 12e, the transmitted power
Pic is 0. However, as the AC microgrid cannot satisfy the reactive power demand, the reactive power control for the ICs is operated as STATCOM. So the transmitted reactive power
Qic from DC-side is 1.0 kVar.
It is concluded that the IC is a key element of the AC/DC hybrid for energy transmission, which not only can realize the transfer of active power and maintain the power balance of a hybrid microgrid system, but also provide reactive power compensation and other functions.
6. Conclusions
This paper proposes an autonomous power flow control to coordinate distributed components of a hybrid microgrid, consisting of ES units, PV generators, and interlink converters. The modified Droop-1 control is presented for PV generators, which considers the specific characteristics of generation units and avoids output power changes. No communication for the primary control is required, and the allowable voltage deviation from its nominal value is effectively used.
Furthermore, to avoid voltage limit violation, a novel Droop-2 control strategy is implemented to DC-side storage. Results show that proper power sharing and supply-demand balancing in islanded microgrids are achieved without communication. Moreover, the combination (Droop-3) of two control principles is introduced in order to obtain the advantages of both.
As a key element of a hybrid microgrid, an efficient control scheme of the IC is proposed with progressive energy flow tuning. Results show that the developed control can operate autonomously without fast communication links. It allows energy flow across the hybrid microgrid only when one of two sides is over-loaded, avoiding the operating losses. Furthermore, the IC can operate as a STATCOM to satisfy the reactive power demand. Finally, simulations results are provided to verify the effectiveness and performance of the proposed control strategy.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}