Robust Fuzzy Adaptive Sliding Mode Stabilization for Fractional-Order Chaos


Abstract
:1. Introduction
2. Preliminaries
2.1. Basic Definitions
2.1.1. Riemann–Liouville (R-L) Definition
2.1.2. Grünwald–Leitnikov (G-L) Definition
2.2. Implementation of Fractional Operator
Grünwald–Leitnikov (G-L) Approximation
2.3. General Fractional-Order Chaotic System Description
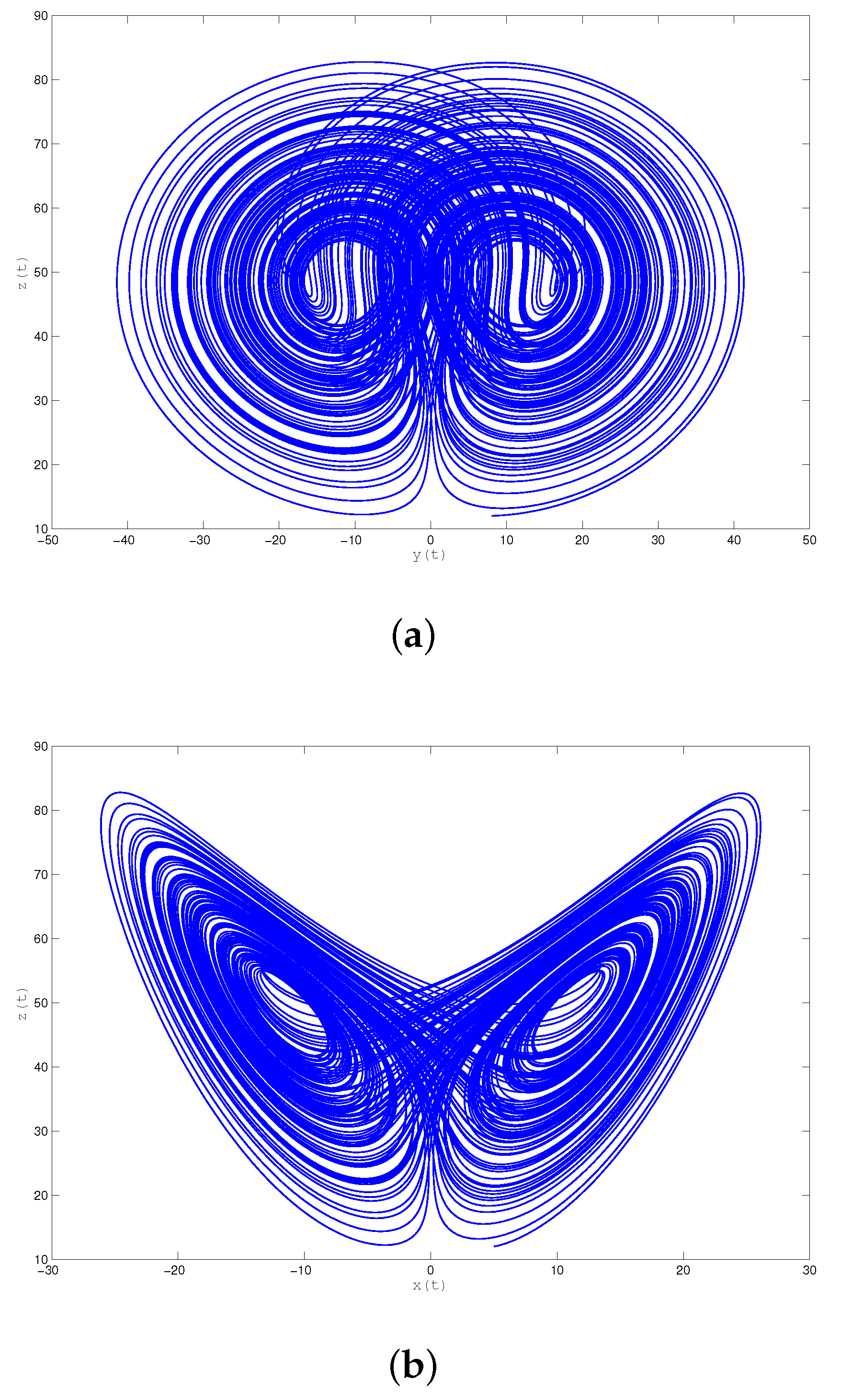
Fractional Order Chen System
3. Introduction to Fuzzy Systems
4. Sliding Mode Control Design for the General Fractional-Order Chaotic System
4.1. Sliding Mode Control Law
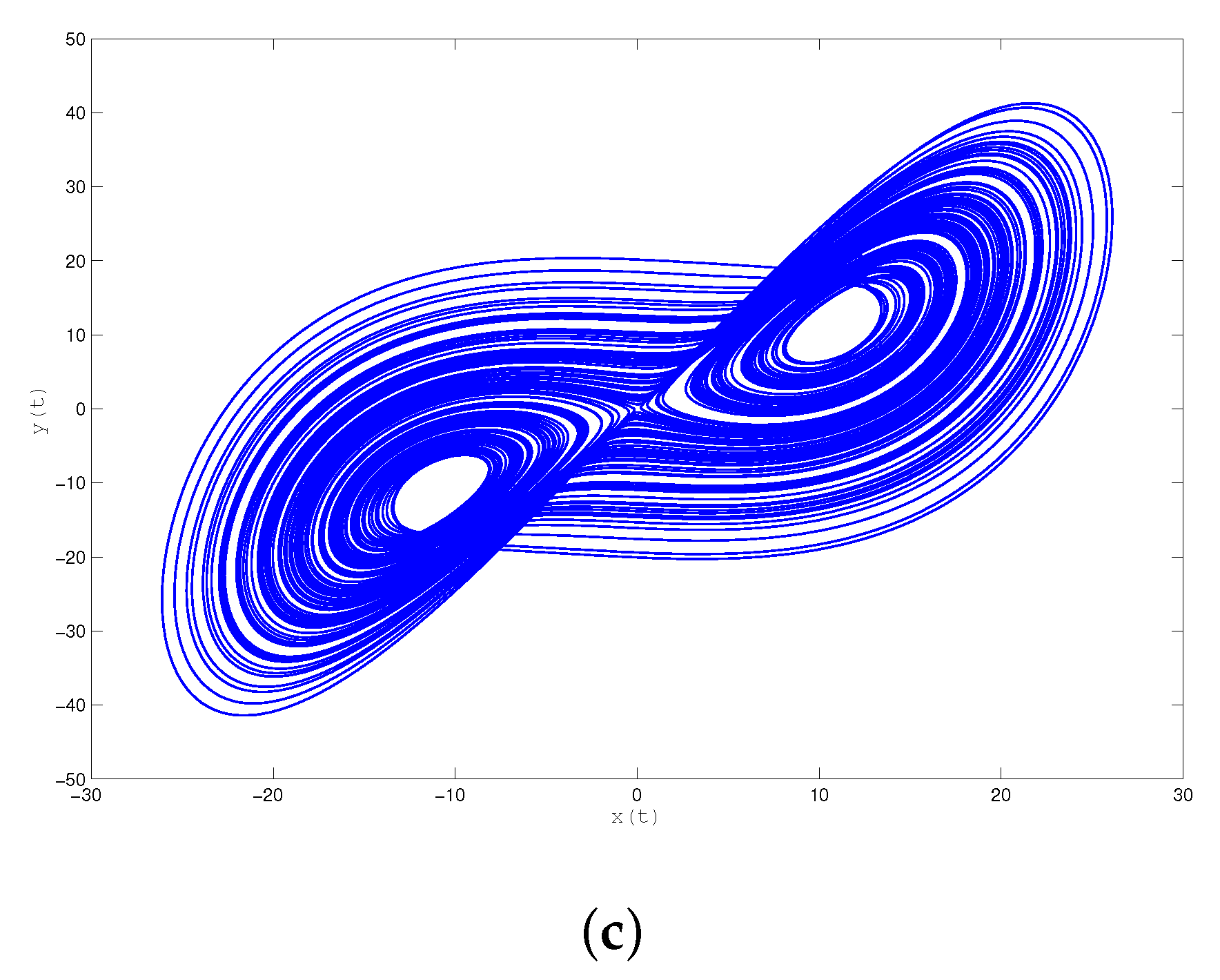
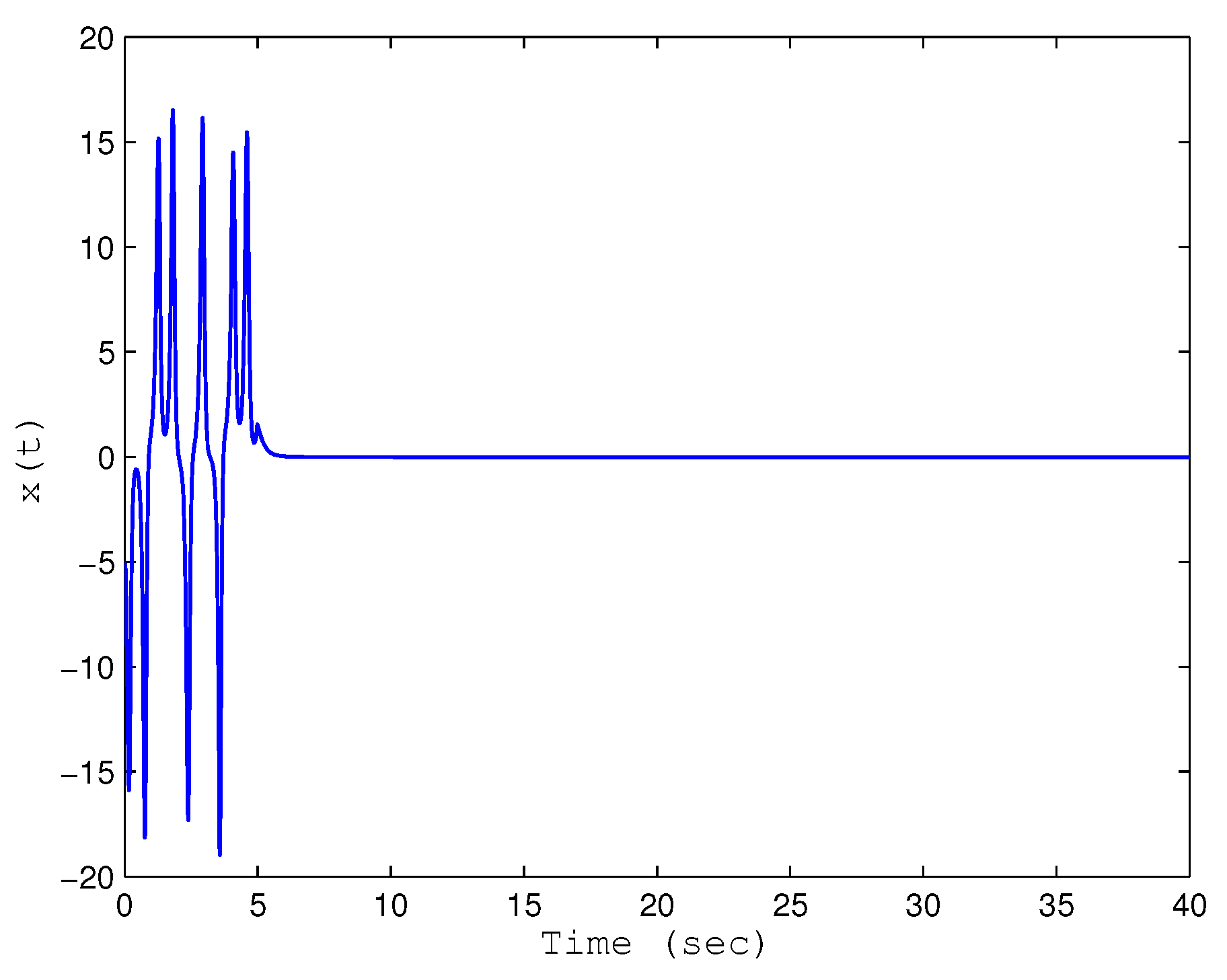
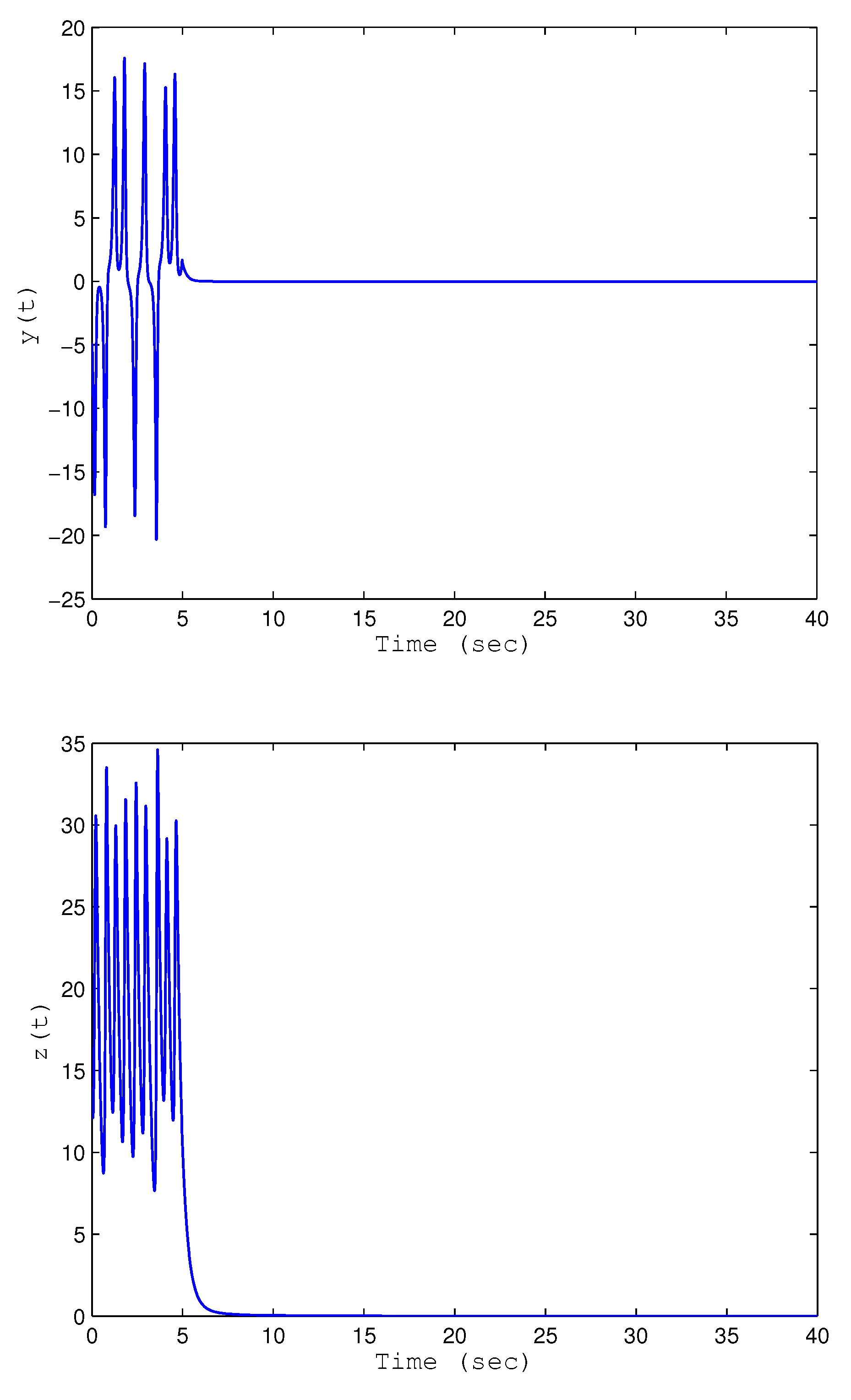
4.2. Application to Fractional-Order Chen System
5. Fuzzy Adaptive Sliding Mode Control of Uncertain Perturbed Fractional Order Chaotic System
Application to the Uncertain and Disturbed Fractional-Order Chen System
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ladaci, S.; Bensafia, Y. Indirect fractional order pole assignment based adaptive control. Eng. Sci. Technol. Int. J. 2016, 19, 518–530. [Google Scholar] [CrossRef]
- Ladaci, S.; Loiseau, J.J.; Charef, A. Adaptive internal model control with fractional order parameter. Int. J. Adapt. Control Signal Process. 2010, 24, 944–960. [Google Scholar] [CrossRef]
- Neçaibia, A.; Ladaci, S.; Charef, A.; Loiseau, J.J. Fractional order extremum seeking approach for maximum power point tracking of photovoltaic panels. Front. Energy 2015, 9, 43–53. [Google Scholar] [CrossRef] [Green Version]
- Bourouba, B.; Ladaci, S. Comparative performance analysis of AG, PSO, CA and ABC algorithm’s for fractional pid controller. In Proceedings of the International Conference on Modelling, Identification and Control (ICMIC 2016), Algiers, Algeria, 15–17 November 2016; Volume 8, pp. 960–965. [Google Scholar]
- Tsai, J.S.; Chien, T.H.; Guo, S.M.; Chang, Y.P.; Shieh, L.S. State-space self-tuning control for stochastic fractional-order chaotic systems. IEEE Trans. Circuits Syst. 2007, 54, 632–642. [Google Scholar] [CrossRef]
- Yang, L.; Jiang, J. Complex dynamical behavior and modified projective synchronization in fractional-order hyper-chaotic complex Lü system. Chaos Solitons Fractals 2015, 78, 267–276. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, H.; Li, Y.; Pei, B. Image encryption based on synchronization of fractional chaotic systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 3735–3744. [Google Scholar] [CrossRef]
- Danca, M.F.; Feckan, M.; Kuznetsov, N.V.; Chen, G. Complex dynamics, hidden attractors and continuous approximation of a fractional-order hyperchaotic PWC system. Nonlinear Dyn. 2018, 91, 2523–2540. [Google Scholar] [CrossRef]
- Danca, M.F.; Feckan, M.; Kuznetsov, N.V.; Chen, G. Fractional-order PWC systems without zero Lyapunov exponents. Nonlinear Dyn. 2018, 92, 1061–1078. [Google Scholar] [CrossRef]
- Tavazoei, M.S.; Haeri, M. Stabilization of unstable fixed points of fractional-order systems by fractional-order linear controllers and its applications in suppression of chaotic oscillations. J. Dyn. Syst. Meas. Control 2010, 132, 021008. [Google Scholar] [CrossRef]
- Rabah, K.; Ladaci, S.; Lashab, M. Bifurcation-based fractional-order piλdμ controller design approach for nonlinear chaotic systems. Front. Inf. Technol. Electron. Eng. 2017. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Delgado-Aguilera, E. Adaptive synchronization of fractional lorenz systems using a reduced number of control signals and parameters. Chaos Solitons Fractals 2016, 87, 1–11. [Google Scholar] [CrossRef]
- Lin, T.C.; Kuo, C.H. H∞ synchronization of uncertain fractional order chaotic systems: Adaptive fuzzy approach. ISA Trans. 2011, 50, 548–556. [Google Scholar] [CrossRef] [PubMed]
- Khettab, K.; Ladaci, S.; Bensafia, Y. Fuzzy adaptive control of fractional order chaotic systems with unknown control gain sign using a fractional order nussbaum gain. IEEE/CAA J. Autom. Sin. 2017, 1–8. [Google Scholar] [CrossRef]
- Shukla, M.K.; Sharma, B.B. Stabilization of a class of uncertain fractional order chaotic systems via adaptive backstepping control. In Proceedings of the Indian Control Conference (ICC), Guwahati, India, 4–6 January 2017; Volume 17, pp. 462–467. [Google Scholar]
- Chen, D.; Liu, Y.; Ma, X.; Zhang, R. Control of a class of fractional-order chaotic systems via sliding mode. Nonlinear Dyn. 2012, 67, 893–901. [Google Scholar] [CrossRef]
- Lin, T.C.; Lee, T.Y. Chaos synchronization of uncertain fractional-order chaotic systems with time delay based on adaptive fuzzy sliding mode control. IEEE Trans. Fuzzy Syst. 2011, 19, 623–635. [Google Scholar]
- Rabah, K.; Ladaci, S. Fractional adaptive sliding mode control laws for fractional-order chaotic systems synchronization. In Proceedings of the International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA’2016), Sousse, Tunisia, 19 December 2016; Volume 17, pp. 293–302. [Google Scholar]
- Huang, Y.J.; Kuo, T.C.; Chang, S.H. Adaptive sliding-mode control for nonlinear systems with uncertain parameters. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2008, 38, 534–539. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Wang, H.; Liu, D.; Huang, H. Sliding mode control of a class of fractional chaotic systems in the presence of parameter perturbations. J. Vib. Control 2015, 21, 435–448. [Google Scholar] [CrossRef]
- Morari, M.; Zafiriou, E. Robust Process Control; Prentice-Hall: Englewood Cliffs, NJ, USA, 1989. [Google Scholar]
- Hosseinnia, S.H.; Ghaderi, R.; Ranjbar, N.A.; Mahmoudiana, M.; Momani, S. Sliding mode synchronization of an uncertain fractional order chaotic system. Comput. Math. Appl. 2010, 59, 1637–1643. [Google Scholar] [CrossRef]
- Ho, H.F.; Wong, Y.K.; Rad, A.B. Adaptive fuzzy sliding mode control with chattering elimination for nonlinear siso systems. Simul. Model. Prac. Theory 2009, 17, 1199–1210. [Google Scholar] [CrossRef]
- Lin, T.C.; Lee, T.Y.; Balas, V.E. Adaptive fuzzy sliding mode control for synchronization of uncertain fractional order chaotic systems. Chaos Solitons Fractals 2011, 44, 791–801. [Google Scholar] [CrossRef]
- Sutha, S.; Lakshmi, P.; Sankaranarayanan, S. Fractional-order sliding mode controller design for a modified quadruple tank process via multi-level switching. Comput. Electr. Eng. 2015, 45, 10–21. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Bourouba, B.; Ladaci, S.; Chaabi, A. Reduced order model approximation of fractional order systems using differential evolution algorithm. J. Control Autom. Electr. Syst. 2018, 29, 32–43. [Google Scholar] [CrossRef]
- Ladaci, S.; Charef, A. On fractional adaptive control. Nonlinear Dyn. 2006, 43, 365–378. [Google Scholar] [CrossRef]
- Diethlem, K. Efficient solution of multi-term fractional differential equations using P(EC)mE methods. Computing 2003, 71, 305–319. [Google Scholar] [CrossRef]
- Yin, C.; Dadras, S.; Zhong, S.; Chen, Y.Q. Control of a novel class of fractional-order chaotic systems via adaptive sliding mode control approach. Appl. Math. Model. 2013, 37, 2469–2483. [Google Scholar] [CrossRef]
- Lu, J.G.; Chen, G. A note on the fractional-order chen system. Chaos Solitons Fractals 2006, 27, 685–688. [Google Scholar] [CrossRef]
- Gomez, J.F.; Jamshidi, M. Fuzzy adaptive control for a uav. J. Intell. Robot. Syst. 2011, 62, 271–293. [Google Scholar] [CrossRef]
- Ren, C.; Tong, S.; Li, Y. Fuzzy adaptive high-gain-based observer backstepping control for siso nonlinear systems with dynamical uncertainties. Nonlinear Dyn. 2012, 67, 941–955. [Google Scholar] [CrossRef]
- Chen, B.S.; Lee, C.H.; Chang, Y.C. H∞ tracking design of uncertain nonlinear siso systems: Adaptive fuzzy approach. IEEE Trans. Fuzzy Syst. 1996, 4, 32–43. [Google Scholar] [CrossRef]
- Yin, C.; Zhong, S.; Chen, W. Design of sliding mode controller for a class of fractional-order chaotic systems. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 356–366. [Google Scholar] [CrossRef]
- Leonov, G.A.; Kuznetsov, N.V. On differences and similarities in the analysis of Lorenz, Chen and Lu systems. Appl. Math. Comput. 2015, 256, 334–343. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Model | ||||
|---|---|---|---|---|---|
| Chen’s system | a | x | 0 | ||
| Lorenz system | a | x | 0 | ||
| Lu’s system | a | x | 0 | ||
| Liu system | x | 0 | |||
| Financial system | x | 0 | 1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bourouba, B.; Ladaci, S. Robust Fuzzy Adaptive Sliding Mode Stabilization for Fractional-Order Chaos. Algorithms 2018, 11, 101. https://doi.org/10.3390/a11070101
Bourouba B, Ladaci S. Robust Fuzzy Adaptive Sliding Mode Stabilization for Fractional-Order Chaos. Algorithms. 2018; 11(7):101. https://doi.org/10.3390/a11070101
Chicago/Turabian StyleBourouba, Bachir, and Samir Ladaci. 2018. "Robust Fuzzy Adaptive Sliding Mode Stabilization for Fractional-Order Chaos" Algorithms 11, no. 7: 101. https://doi.org/10.3390/a11070101
APA StyleBourouba, B., & Ladaci, S. (2018). Robust Fuzzy Adaptive Sliding Mode Stabilization for Fractional-Order Chaos. Algorithms, 11(7), 101. https://doi.org/10.3390/a11070101