1. Introduction
Maritime transportation is one of the most efficient (per cargo ton-mile) transportation modes to transport large volumes of cargo over long distances [
1,
2]. Over short distances, however, competing with road-based transportation is more challenging. Truck-based door-to-door deliveries are often less expensive compared to other shipping solutions and offer frequent and reliable departures [
3,
4].
The demand for cargo transportation in Norway is expected to grow by 40% (in tonne-kilometers) until 2030 [
5]. This predicted increase i is met by the political ambition to shift more goods from road to sea [
6]. Still, new and innovative solutions need to be developed to substantially improve the competitiveness of short-sea shipping and support the transition of cargo from road-based to waterborne transportation. The Short Sea Pioneer (SSP) logistics system is a new suggested solution to improve competitiveness, proposing a new transshipment mode for short-sea feeder networks [
7]. The proposed system is inspired by the ship-to-ship cargo transfer method currently used to transfer petroleum products and bulk cargo between seagoing vessels. In the SSP system, a mother (large) vessel can be connected to a daughter (small feeder) vessel at a suitable location at sea to transship containerized cargo using a specialized handling cargo system (see [
8] for an illustration). One advantage of this system is to reduce the number of port calls, which reduces the operational cost of the shipping system. Indeed, cargo-related port costs can account for up to 30% of the turnover of a smaller short-sea shipping company [
9]. Besides, it becomes possible to serve small ports that large vessels cannot visit, for example, due to physical limitations.
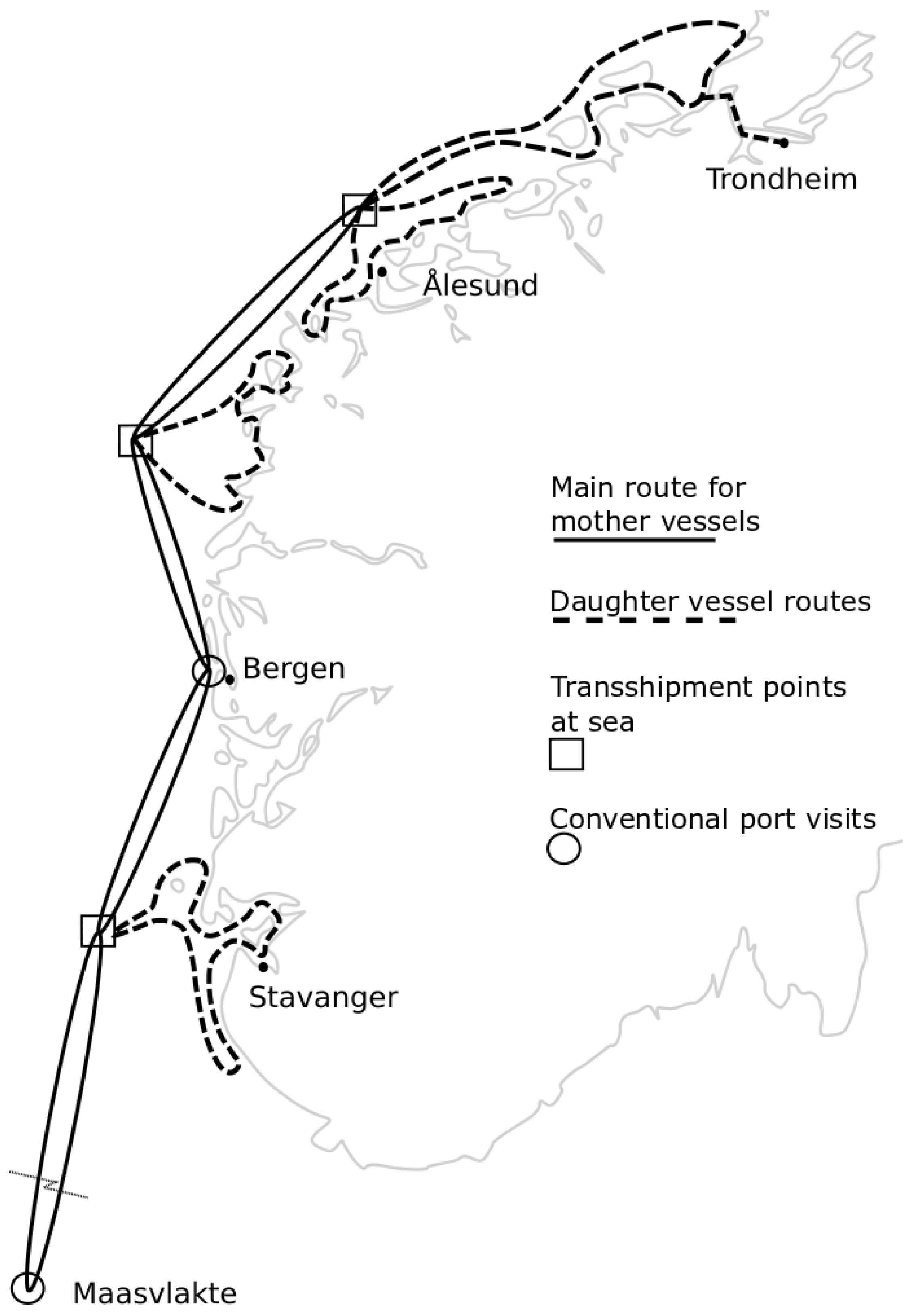
The SSP logistics system is composed of one main route sailed by mother vessels that transport cargo between the European continent and large ports located at the Norwegian west coast. Small daughter vessels operate feeder routes serving smaller Norwegian ports. Due to size or location, these ports may only be served by the smaller daughter vessels. Potential candidate transshipment locations will be in sheltered locations (e.g., inside a fjord or inshore) such that harsh weather does not affect the transshipment operation. An example is illustrated in
Figure 1.
While potentially having considerable economic benefits, transshipment at sea also raises many technical challenges. Among others, the system requires synchronizing the main route sailed by the mother vessel with all routes sailed by the daughter vessels. Conversely, Weather conditions are known to impact sailing times and can cause considerable delays [
2]. Thus, the synchronization operation can be subject to disruptions that may cause additional waiting times at the transshipment location and can propagate through the system for the subsequent periods. To function correctly, the routes for both mother and daughter vessels need to be robust to potential delays, i.e., they have to account for uncertainty in weather conditions.
Traditionally, the literature on liner shipping network design problems has been focusing on deterministic deep-sea (long-haul) shipping networks. These problems usually determine the optimal set of routes to be served by a heterogeneous fleet of vessels while satisfying demand, transshipment, and frequency requirements (see, e.g., Brouer et al. [
11] ). The following publications are recent examples, discussing different variants of the traditional liner network design problem. Meng and Wang [
12] include the repositioning of empty containers in the shipping operations when determining the optimal network design. Reinhardt and Pisinger [
13] consider more advanced route structures, such as butterfly routes, because they allow for better use of vessel resources. Brouer et al. [
11] study one of the largest networks operated by a major liner-shipping company, where cargo can be transshipped several times to take more than one route to be delivered. Karsten et al. [
14] extend this problem to include transit time restrictions. Balakrishnan and Karsten [
15] incorporate limitations on number of transshipments for the cargo. For the short-sea shipping, Msakni et al. [
16] study the impact of different network designs for a local liner shipping company. Fadda et al. [
17] address the problem of a roll-on roll-off liner service that operates using a hub-and-spoke network design. Akbar et al. [
18] provide an economic analysis of introducing autonomous vessels in short-sea shipping. For a more detailed overview of the literature on liner shipping network design, please also see the surveys by Meng et al. [
19], Brouer et al. [
1] and Christiansen et al. [
20].
Synchronization has received relatively little attention in the literature on maritime transportation. Cargo is usually transshipped in ports, often requiring a sequence of arrivals or specifying a time window. The work of Agarwal and Özlem Ergun [
21] is one of the fewest papers to address synchronization directly. The problem considers a combined vessel scheduling and cargo routing problem, where transshipment of cargo is only possible when two routes meet at the same port on the same day. In another work, Andersson et al. [
22] study a problem from project shipping where different cargoes may require a synchronized delivery. In land-based transportation, synchronization issues are more common. The reader is referred to Drexl [
23] for an overview of the literature on VRPs with multiple synchronization constraints.
The research on uncertainty in maritime service networks mainly distinguishes between two types of uncertainty. The first type is uncertainty in service times, usually port times or sailing times, whereas the second type considers uncertainty in demand. When considering uncertainty in operations, the research focuses on keeping a designed schedule, i.e., satisfy frequency requirements or pickup and delivery time windows. As an example of this work line, the problem examined by Wang and Meng [
24] of designing liner vessel routes with uncertainty in port operation times. The uncertainty is related to sailing times as a consequence of making up for the delays. In Song et al. [
25], a multi-objective liner shipping service problem with uncertain port times is studied. One of the objectives is to minimize schedule unreliability, which is the probability of the vessels arriving after the scheduled time windows. Conversely, Li et al. [
26] study how vessels can recover from delays caused by regular uncertainties and unexpected disruptions. In their work, regular uncertainties may happen both at sea and in port, and their characteristics can be estimated using historical data. When it comes to demand uncertainty, the research usually focuses on designing a maritime transportation system such that demand can be served. For example, Ng and Lin [
27] study the problem of fleet deployment under incomplete demand information. Lo et al. [
28] present a model for designing a ferry network given uncertain demand. An and Lo [
29] study the design of more general transit networks under uncertain demand. However, none of these studies consider uncertainty in service times.
One approach to deal with the uncertainty is to combine simulation and optimization models to provide robust solutions. Fischer et al. [
30] use simulation and optimization to evaluate the robustness of tactical fleet deployment plans for roll-on roll-off liner shipping with respect to random disruptions at the operational level. Castilla-Rodríguez et al. [
31] study the quay crane scheduling problem in a port terminal and consider the uncertainty from the availability of some delivery vehicles and disruptions in quay crane operations. The authors use simulation-optimization to produce robust quay crane schedules. Layeb et al. [
32] develop a simulation-optimization method for multimodal freight transportation systems where the uncertainty is related to demand and travel times. Poeting et al. [
33] combine a metaheuristic with a discrete-event simulation to provide robust solutions at the operational level in parcel transshipment terminals.
This paper considers the first type of uncertainty, more specifically uncertain sailing times due to harsh weather conditions. However, in contrast to the papers mentioned above, it studies a short-sea liner network instead of a deep-sea network. A common assumption in papers on deep-sea liner network design with uncertain port times is that vessels can make up for delays by increasing their speed between ports (see, e.g., Wang and Meng [
24]). This can be reasonable when legs between ports are long. However, for short-sea networks, the sailing legs are short, and weather conditions may prevent the vessel from reducing or even eliminating a delay.
The problem presented in this paper is an extension to the deterministic Short-sea Liner Network Design Problem with Transshipment at Sea (SLNDP-TS) introduced by Holm et al. [
10]. It contributes to the research literature on liner shipping network design in three ways. Firstly, we take into account uncertain sailing times due to harsh weather in the network design problem. Secondly, we consider transshipments at sea, which requires that the synchronization of routes to ensure that mother and daughter vessels are at the same location at the same time. Thirdly, we apply an iterative solution approach combining optimization with discrete event simulation to handle both uncertainties in sailing times and synchronization requirements.
Our solution method is based on the hybrid optimization-simulation method proposed by Acar et al. [
34] with the difference of using a discrete-event model instead of an optimization model for the simulations. Unlike commonly used probabilistic models, we use wave height from historical weather data to adequately capture the effect of harsh weather conditions on sailing speed. The simulation model links wave height to vessel speed and evaluates the impact on the synchronization operations. The simulation results are returned to the optimization model to select routes that are less likely to generate delays. Additionally, we develop and test different performance-improving strategies to enhance the solutions’ robustness to possible delays. The computational study results show that our approach provides more robust solutions than deterministic ones without a significant increase in costs.
The remainder of this paper is structured as follows. In
Section 2, the problem is described in more detail.
Section 3 outlines the solution approach. The optimization and simulation models are presented in more detail in
Section 4. Results from the computational study are presented in
Section 5. We conclude in
Section 6.
2. Problem Description
The problem of designing a short-sea liner network with transshipment at sea has been introduced by Holm et al. [
10]. The authors provide a deterministic problem formulation as well as a solution method based on a priori route generation. In this section, we first present the problem before discussing the impact of weather conditions on shipping operations in such a network.
2.1. Network Design Problem
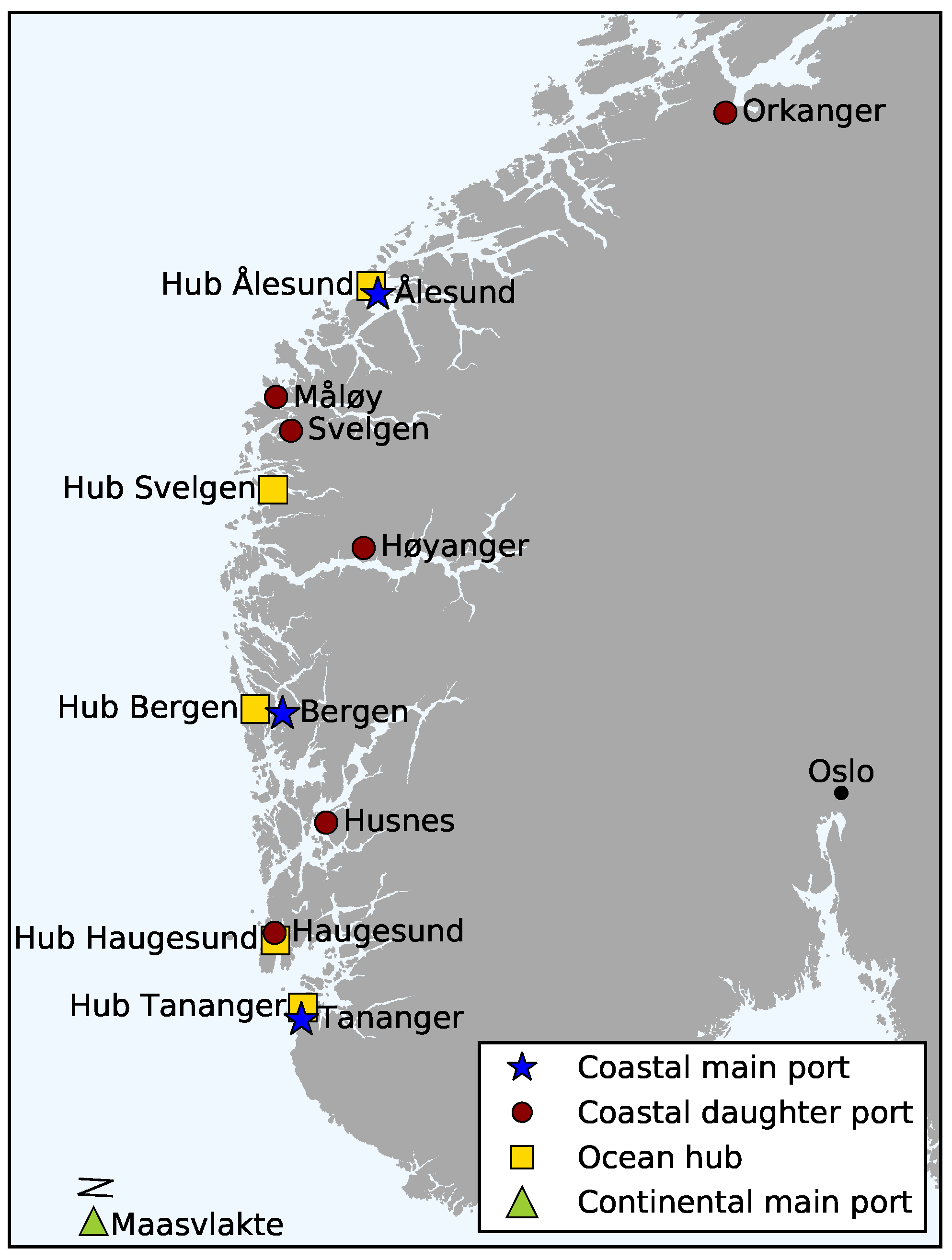
The shipping company serves each port on a weekly basis. The Norwegian ports are classified according to their size. Small ports are only served by daughter vessels, whereas large ports can be visited by either a mother or a daughter vessel. All mother vessels start their voyage at a European continental main port. Transshipment of cargo between mother and daughter vessels occurs at the so-called ocean hubs, which are suitable locations along the Norwegian coast and offer enough stability for vessels to perform transshipment at sea. For presentation and modeling purposes, each ocean hub is artificially split into a north-going and a south-going ocean hub. A mother vessel serves a north-going ocean hub during its northbound journey and a south-going ocean hub on its southbound journey.
The feeder routes taken by daughter vessels are referred to as daughter routes. Each daughter route is served by one daughter vessel. These routes have a maximum duration of one week to ensure weekly port visits. The route served by the mother vessel is referred to as main route. Since the duration of the main route is typically more than one week, the number of deployed mother vessels is equal to the number of weeks rounded up to the nearest integer, thus ensuring weekly service.
The major activity of the shipping company case is to transport cargo between the main continental port and Norwegian ports. There is also some local demand between Norwegian ports, but can be considered as negligible in this study. The aim is to determine the optimal main and daughter routes and the optimal fleet of mother and daughter vessels to be deployed. This problem is at a tactical level, where the established routes last for typically four to 12 months, and, therefore, the weekly demand is assumed to be known and constant.
Transshipment of cargo between mother and daughter vessels is only possible at ocean hubs. During its northbound journey, mother and daughter vessels meet at a north-going ocean hub where cargo is delivered to the daughter vessel. The same mother and daughter vessels meet again at the corresponding south-going ocean hub during the southbound journey of the mother vessel to transship cargo from the daughter vessel. In the case an ocean hub is the northernmost point of the main route, there is no artificial distinction between north- and south-going ocean hub, and the ocean hub is therefore only visited once.
A solution to the problem consists of a set of main and daughter routes serving the ports and an allocation of vessels to routes (as illustrated in
Figure 1). This also includes determining the number of deployed mother and daughter vessels. The mother vessels are considered to have enough capacity to transport all cargo. The size of the daughter vessels can be selected from a given set of available capacities. The problem is separable in the size of the daughter vessel because all daughter vessels must have the same capacity due to the technical requirements of the SSP design. The objective is to minimize the weekly operating costs, including weekly time charter costs for each vessel in the selected fleet, bunker, port, and cargo handling costs.
2.2. Impact of Harsh Weather
A transshipment in an ocean hub requires that both the mother vessel and the daughter vessel have to be present at the same location at the same time. The meeting point is selected in a sheltered location, such that harsh weather will not affect the transshipment operation. However, harsh weather conditions will affect sailing operations as they may force vessels to slow down, causing delays in the vessels’ schedules. We refer to the situation of a mother vessel waiting for a daughter vessel in an ocean hub as a synchronization violation. Synchronization violations delay the waiting vessel, potentially delaying later synchronizations and affecting other vessels in the system.
If a vessel is delayed by too much, it might be unable to complete its route within the maximum allowed duration. This is called a duration violation. Duration violations prevent a weekly port visit frequency because the delay is transferred into the next week. For a logistics system with transshipment at sea to be viable in practice, duration violations must be kept at a minimum.
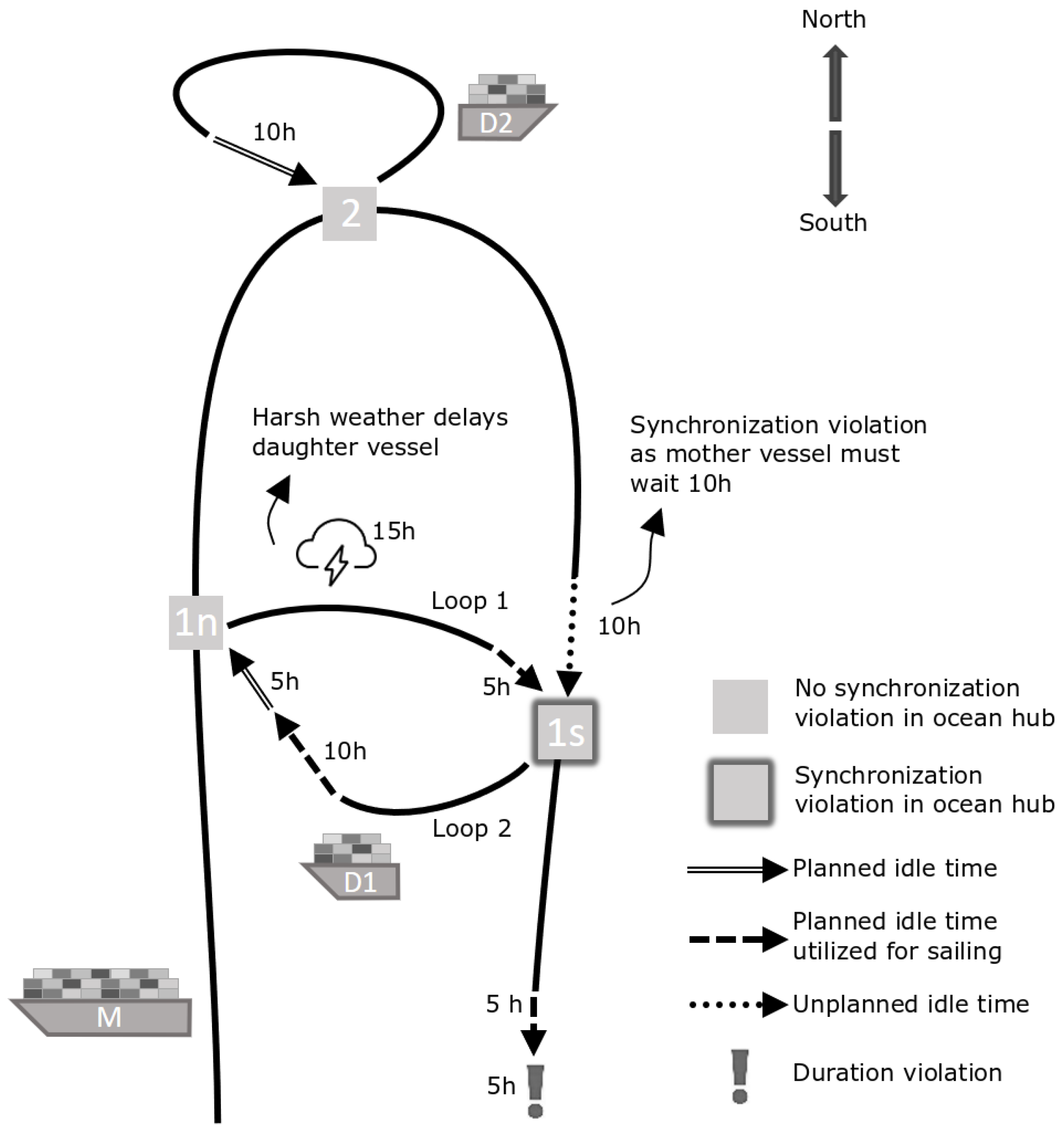
Figure 2 illustrates synchronization and duration violations. Consider a logistics system consisting of a mother vessel, M, and two daughter vessels, D1 and D2. Daughter vessel D1 visits the north- and south-going ocean hubs, 1n and 1s, respectively. The mother vessel and Daughter vessel D2 meet at ocean hub 2 for picking-up and delivering cargo because ocean hub 2 is the northernmost point. For simplicity, Norwegian ports and the continental main ports are not shown.
In the example, the mother vessel is sailing north from the continental main port. In ocean hub 1n, she meets with daughter vessel D1, and after the transshipment, both vessels depart as scheduled. Neither of the vessels is delayed at this point. The mother vessel continues north to ocean hub 2 without any delay. Daughter vessel D2 is not delayed either, and thus both vessels can synchronize as planned in ocean hub 2. In this example, daughter vessel D2 has 10 h of planned idle time before the arrival of the mother vessel. It could, therefore, be up to 10 h delayed and still synchronize with the arriving mother vessel as scheduled.
After leaving ocean hub 2, the mother vessel starts its southbound journey and sails towards ocean hub 1s to synchronize again with daughter vessel D1. However, harsh weather has caused a delay for daughter vessel D1 after departing from ocean hub 1n. Despite arriving on time in ocean hub 1s, the mother vessel has to wait for daughter vessel D1 and experiences a synchronization violation.
The schedule for daughter vessel D1 has planned idle time of five hours in ocean hub 1s before the arrival of the mother vessel. As the vessel is delayed by as much as 15 h, the mother vessel has to wait for 10 h. As the mother vessel only has five hours of planned idle time in its schedule, the next departure from the continental main port is five hours of delay. The synchronization violation in ocean hub 1s has caused a duration violation of five hours for the mother vessel.
Note that daughter vessel D1 does not incur a duration violation, even though it is 10 h delayed when leaving ocean hub 1s. This is because there is enough planned idle time when sailing between ocean hub to 1s and ocean hub 1n to make up for the delay.
3. Solution Approach
Our iterative solution method is based on the hybrid optimization simulation framework proposed by Acar et al. [
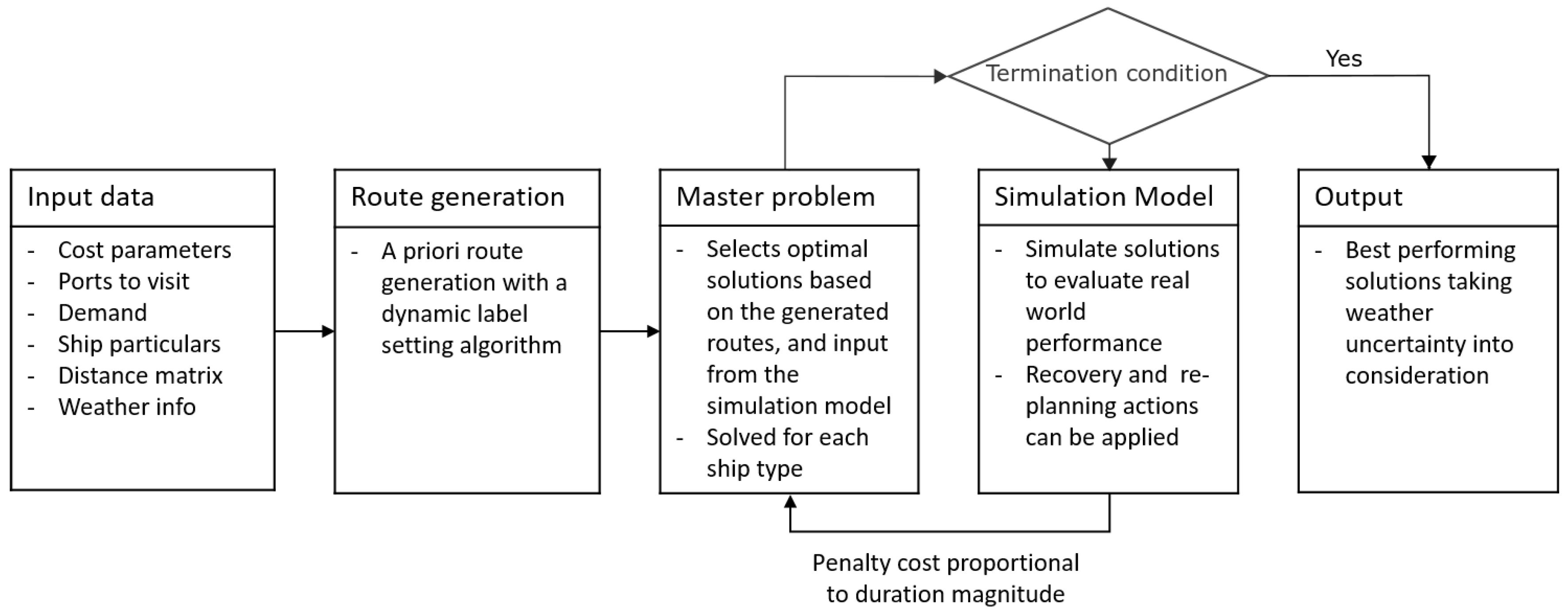
34]. The solution method combines an optimization model (also referred to as the master problem) and a simulation model. The role of the optimization model is to select routes for mother and daughter vessels from a set of a priori generated routes, while the simulation is a discrete event simulation model that evaluates the robustness of solutions (a solution is a combination of routes) with respect to uncertain weather conditions. The simulation model results are used to update the costs of the simulated solutions and then faded back to the optimization model. Alternating between optimization and simulation models is repeated until no new improved solution is found. The proposed solution method is illustrated in
Figure 3. According to the classification of Crainic et al. [
35], the proposed approach is within the alternate simulation-optimization category.
A static set of routes for the mother and daughter vessels is generated using the provided input data. For each of the daughter vessel types, the master problem then selects the cost-minimizing routes from this set by solving an integer programming model (described in more detail in
Section 4.1). Afterwards, the combination of routes chosen by the master problem is simulated using historical weather data to estimate the solution’s real-world performance (described in more detail in
Section 4.2).
As explained in
Section 2.2, a duration violation is caused by harsh weather conditions that lead to a delay long enough to prevent the vessel from completing its round trip within its scheduled duration. Synchronization violations can amplify delays as they may transfer the delay of one vessel to another. A duration violation will automatically lead to an initial disruption when starting the next round trip. The magnitude of a duration violation is defined as the number of hours by which a vessel is late compared to the allowed duration of one round trip.
We add a penalty cost based on the magnitude of duration violations from the simulation to the costs of the selected combination of routes. This additional penalty cost makes solutions (or route combinations) prone to duration violations less attractive in subsequent iterations of solving the master problem. When the master problem is solved again with updated route costs, it might choose a new solution with lower costs. The iterations between the master problem and the simulation model continue until all of the selected solutions have been simulated, and no new improving solutions are found. This feedback approach between the master problem and the simulation model allows generating good solutions based on the trade-off between operational costs and robustness (i.e., penalty costs).
Different strategies to provide robustness against disruptions due to harsh weather and/or synchronization violations can be included in the optimization and/or simulation model (discussed more in
Section 4.3). Thus, the framework can also be used to evaluate the potential benefit of introducing performance-improving strategies, for example, permitting speed-ups in case of a delay (see, e.g., Fischer et al. [
30], Brouer et al. [
36]).
4. Optimization and Simulation Model
This section provides a more detailed description of the optimization and the simulation models used in the proposed solution method. The optimization model is described in
Section 4.1, while the simulation model is presented in
Section 4.2. Possible performance-improving strategies that can be evaluated using our solution methods are described in
Section 4.3.
4.1. Optimization Model
The optimization model is based on the approach developed by Holm et al. [
10] and consists of a route generation procedure and a master problem. The difference is that, in this study, the optimization model incorporates updated costs from the simulation model. For an efficient route generation, a label-setting algorithm (see, e.g., Irnich [
37]) is used to generate a priori the routes for mother and daughter vessels. After the routes are generated, the daughter routes are grouped in subsets according to which main route they can be synchronized with.
The label setting algorithm is used to limit the set of routes introduced to the optimization model. Only non-dominated routes are retained, which means that similar routes composed of the same ports but in a different order and with higher operational costs are eliminated. The route generation assumes that vessels sail at their design sailing speed, i.e., no speed-up is allowed. Here, it should be pointed out that some of the deterministically dominated routes might perform better in our setting with uncertain travel time, e.g., due to a sequence of port visits that allows avoiding harsh weather conditions. However, identifying these routes during the route generation procedure is, in general, too computationally expensive.
Before formulating the optimization model, let us first introduce the following notation:
Sets
set of ocean hubs,
set of Norwegian small ports,
set of Norwegian main ports,
set of all non-dominated main routes,
set of all non-dominated daughter routes,
subset of main routes, for which port p is served, ,
subset of daughter routes, for which port p is served, ,
subset of daughter routes that can be synchronized to a main route m at ocean hub p, ,
set of simulated solutions. If the set is empty, no solutions have been simulated. The size of the set increases for every new solution that is simulated.
Parameters
total operational cost of main route m, which includes the weekly time charter cost of mother vessels sailing m, bunker costs and port costs,
operational cost of daughter route d, which includes the weekly time charter cost of daughter vessel sailing d, bunker costs and port costs,
penalty cost of simulated solution s,
upper limit on the number of daughter vessels that can perform transshipment at an ocean hub,
a value that is marginally larger than ,
is equal to 1 if daughter route d belongs to simulated solution s, and 0 otherwise,
is equal to 1 if main route m belongs to simulated solution s, and 0 otherwise,
number of routes which belong to solution s. This can be expressed as follows: , for each simulated solution s,
auxiliary parameter used to express a less than relation as a less than or equal relation. The value can be as small as possible as long as .
Binary decision variables
equals to 1 if main route m is selected, and 0 otherwise,
equals to 1 if daughter route d is selected, and 0 otherwise,
takes value 1 if a simulated solution is included in the optimal solution, and 0 otherwise.
The deterministic optimization problem can be formulated as follows:
subject to
The objective function (
1) minimizes the total weekly cost of the shipping system. The first and second terms of (
1) are related to the costs of mother and daughter vessels deployed in the system. The last term represents the penalty cost of a solution.
Equation (2) forces the optimal solution to select only one main route. Constraints (3) to (5) are the synchronization constraints, ensuring that selected daughter routes can synchronize with the main route at an ocean hub visited by both routes. The reader is referred to Holm et al. [
10] for a more detailed description of how synchronization is taken care of through these constraints. Further, Equation (6) ensure that a main port is visited by either a mother or a daughter vessel. Equations (7) ensure that each small Norwegian port is served by a daughter route. Constraints (8) set the indicator variable
. If the master problem selects a route combination that constitutes a previously simulated solution,
and the penalty cost is added to the objective. Lastly, Constraints (9)–(11) restrict the variables to take binary values.
4.2. Simulation Model
The optimal solution of the master problem assumes that the shipping system runs under perfect weather conditions, and both mother and daughter vessels sail at design speed. The simulation model evaluates the proposed solution under real-world operating conditions. Harsh weather conditions may force vessels to slow down, affecting the sailing times. In such a situation, synchronization and duration violations can occur.
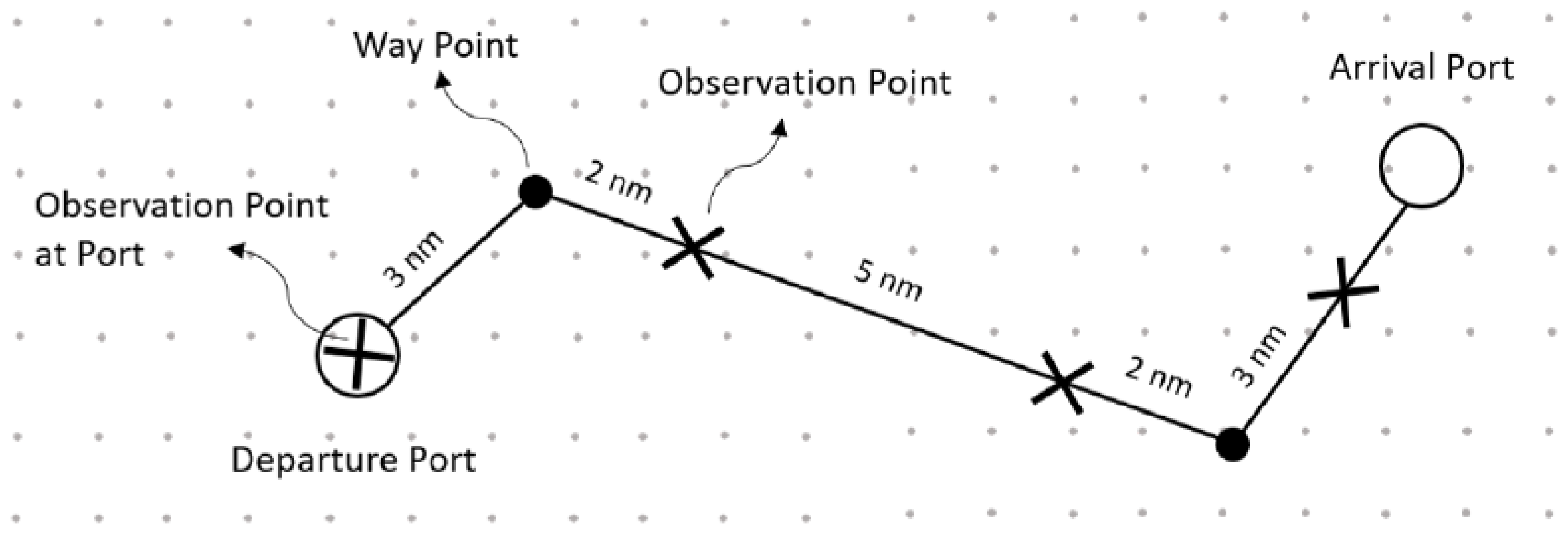
The simulation model adjusts the sailing speed based on wave height. To this end, we divide a route into legs connecting two consecutive ports. For a given leg, waypoints are defined and mark a change in the vessel’s travel direction. The segment between two successive waypoints is defined as a sub-leg. The simulation model updates the sailing speed of a vessel at specific points of a leg. Such a point is called an observation point and is defined (i) at a departure port and (ii) after sailing a certain distance, called step distance.
Figure 4 shows an example of a route between two ports. There are three sub-legs defined by the ports and waypoints. The observation points are equally separated by the step distance, which is set to be five nautical miles in this example. The background of
Figure 4 shows the gridded weather data points.
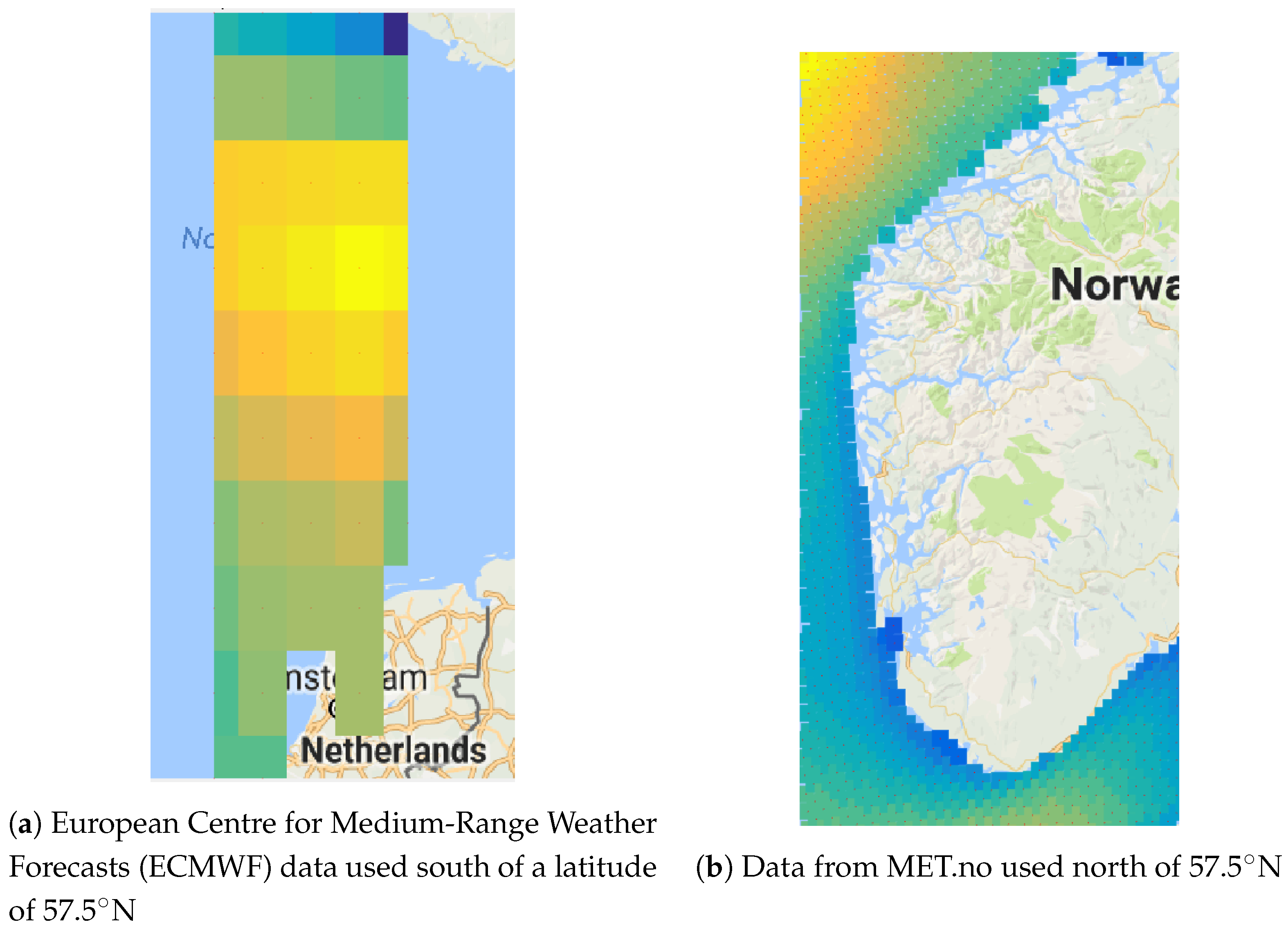
To determine the speed of a vessel, we use historical weather data composed of a grid of data points that contain significant wave height. The parameter ‘significant wave height’ is often used to describe the weather in maritime navigation and is defined as the average height of the highest one-third waves [
38]. At each observation point, we extract the significant wave height from the closest data point.
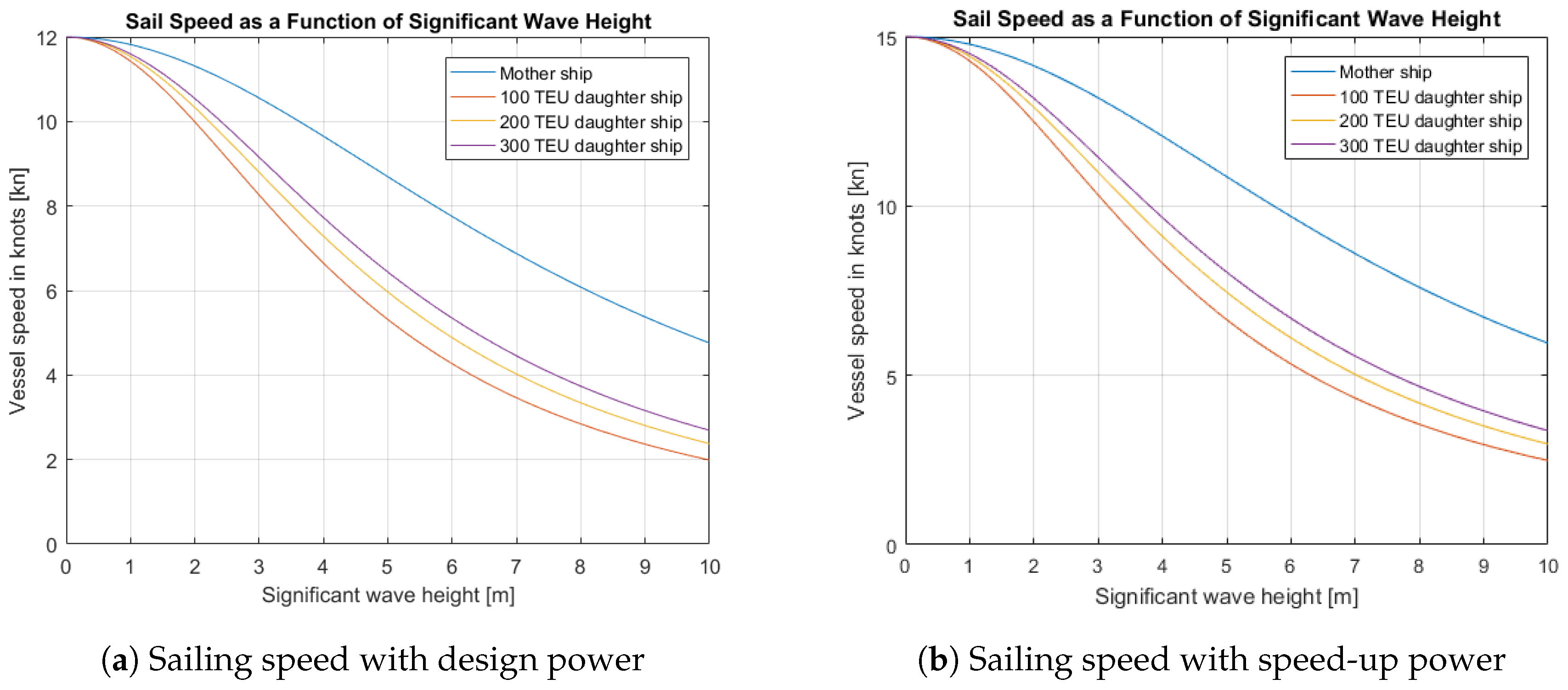
Estimating the vessel speed in open water requires detailed information about the vessel, e.g., regarding hull design and loading conditions, to carry out accurate hydrodynamic calculations. Such information is often not available at an early stage of designing feeder networks. Therefore, we use a simplified approximation of the hydrodynamic relationship between wave height and vessel speed in our simulation model. We assume that vessels are often designed to be operated at a particular propulsion power for which the engines run efficiently, and they sail with constant design power that is maintained throughout the route. Since the vessel speed is a function of propulsion power and total resistance, and given that the propulsion power is assumed to be constant, higher waves and winds due to harsh weather cause an increase in total resistance, which results in a decrease of vessel speed. In our model, resistance from waves is calculated according to the STAwave-1 method [
39].
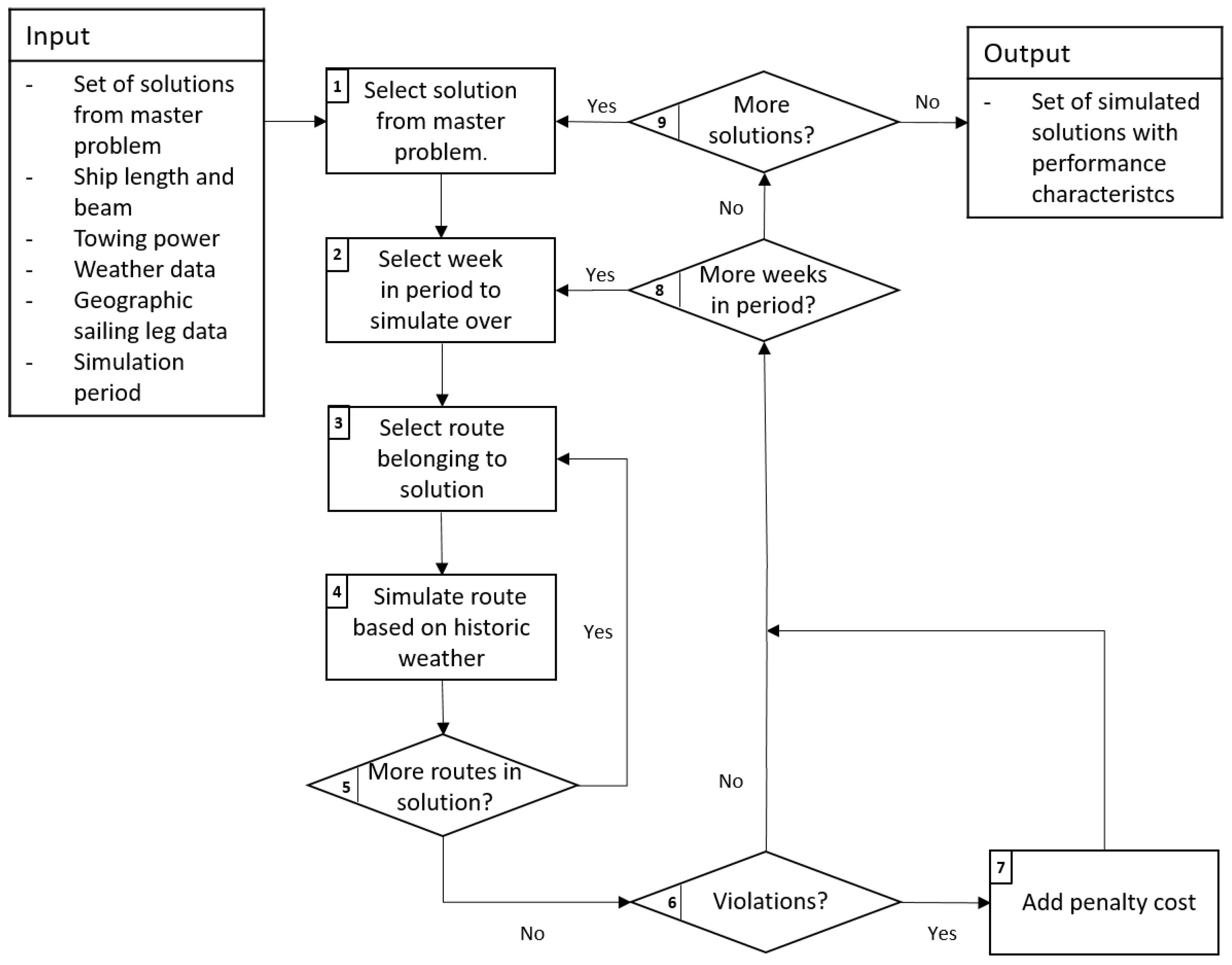
The flow chart in
Figure 5 shows the overall simulation process. The input to the simulation model is one (or more) feasible solution(s) from the master problem. In Step 1, the simulation model chooses a solution from the master problem. The week to simulate is chosen in Step 2. In Steps 3–5, all routes in the solution are simulated. Once all routes in the solution are simulated for the given week, synchronization and duration violations are calculated in Step 6. Note that these violations are system-specific, i.e., dependent on the set of routes in the given solution and not only on each route individually. If any violations occur, penalty costs are added to the solution in Step 7. Step 8 checks whether the solution has been simulated for all weeks. Finally, Step 9 ensures that all solutions provided by the optimization model are simulated.
An important element of the simulation model is to penalize duration and synchronization violations. The total penalty cost for a simulated solution is the accumulated penalty costs for all vessels for each week of the simulation period. Hence, route compositions that often incur duration or synchronization violations are receiving a high penalty cost and are less likely to be chosen by the master problem in subsequent iterations.
4.3. Performance-Improving Strategies
Penalizing synchronization and duration violations helps select more robust routes for both mother and daughter vessels, but does not necessarily reflect real-world operations of a feeder network service. In our optimization-simulation model, duration violations propagate from one week to another. In contrast, real-world vessel operators would try to either avoid a delay (e.g., by using more robust routes) or recover from the delay (e.g., by speeding up) before it causes any violations. To further improve the quality of the solutions, we propose two types of performance-improving strategies that mimic real-world operations and are integrated into the solution approach: enhancing the robustness of the routes and recovery from delays.
4.3.1. Enhancing Route Robustness
The first type of strategy tries to enhance the routes’ robustness during the route generation procedure, i.e., before starting the optimization-simulation process. Additional slack (or idle time) is added to some or all of its legs when generating routes. By doing so, a vessel might still be able to synchronize in an ocean hub, even if it has to slow down due to harsh weather. Conversely, adding too much slack can cause excessive waiting times and, as such, increase the operational cost for the vessels. Therefore, determining the amount and place of additional slack while ensuring a sufficient robustness level is an important trade-off to assess. This strategy is comparable to the current practice of airlines where delayed routes can recover at night when no flights are scheduled and the network resets [
36].
Similarly, the robustness of the routes can be enhanced by considering seasonality in the schedules. Due to the difference in weather conditions between summer and winter, it might be beneficial to operate dedicated routes for each season. However, the system needs to operate the same fleet of mother and daughter vessels during the whole year, regardless of the season.
4.3.2. Recovery from Delays
The second type of strategy tries to exploit operational flexibility to recover from delays. If weather permits, a vessel can increase its speed to reduce or even eliminate a delay. Fischer et al. [
30], for example, show that speed-up can be used as a recovery action when considering disruptions in planning fleet deployment in roll-on roll-off liner shipping. Though speeding-up allows recovering from delays in some cases, it requires increased power output, which in turn will increase fuel consumption and thus bunker costs. The ability to speed-up is limited by the maximum propulsion power of the vessels.

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}