Fractional Sliding Mode Nonlinear Procedure for Robust Control of an Eutrophying Microalgae Photobioreactor

 , , and
, , and
Abstract
:1. Introduction
2. Process Modelling
3. A Fractiona-Order Sliding Mode Controller (FOSMC)
Application to a Photobioreactor
4. Internal Model Control (IMC)
5. Numerical Simulation
5.1. Effect of Value on Performance
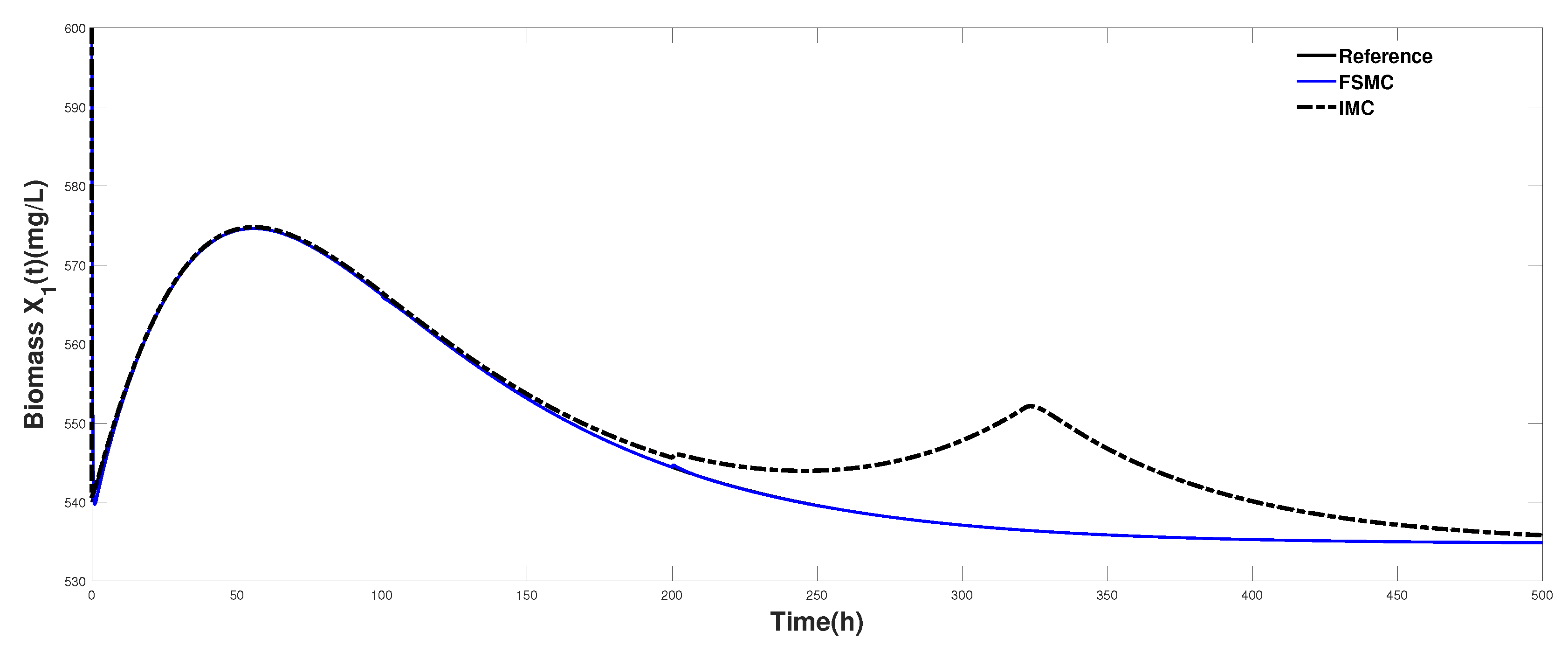
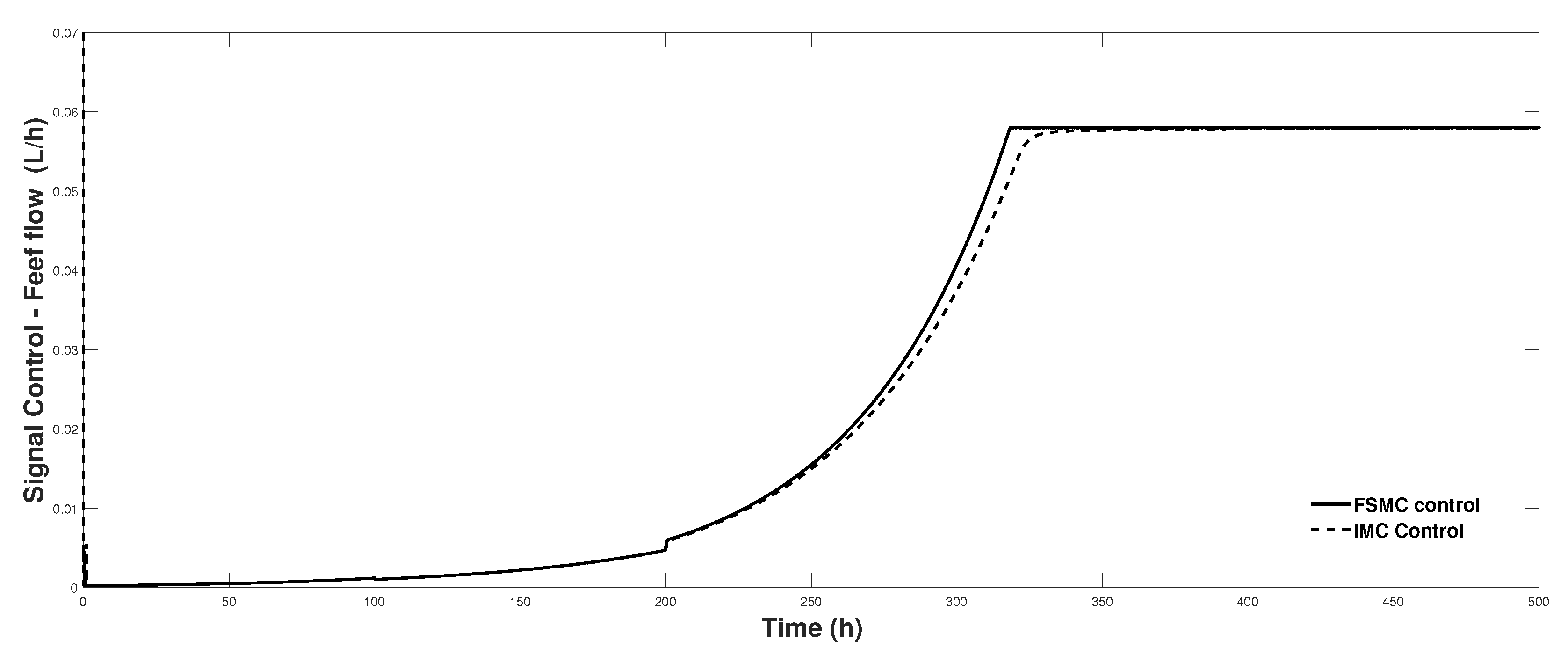
5.2. Comparison of FOSMC with Internal Model Control (IMC)
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Dominguez-Bocanegra, A.R.; Torres-Muñoz, J.A.; Carmona, R.; Aguilar-Lopez, R. Theoretical-practical study on the removal of contaminants in Los Remedios River (State of Mexico). Ingeniería Hidráulica en México 2009, 24, 81–91. [Google Scholar]
- Gomez-Villa, H.; Voltolina, D.; Nieves, M.; Pina, P. Biomass production and nutrient budget in outdoor cultures of Scenedesmus obliquus(Chlorophyceae) in artificial wastewater, under the winter and summer conditions of Mazatlan, Sinaloa, Mexico. Vie et milieu 2005, 55, 121–126. [Google Scholar]
- Bernard, O. Hurdles and challenges for modelling and control of microalgae for CO2 2 mitigation and biofuel production. J. Process Contr. 2011, 21, 1378–1389. [Google Scholar] [CrossRef]
- Rodríguez-Mata, A.; Flores-Colunga, G.; Rangel-Peraza, J.; Lizardi-Jiménez, M.; Amabilis-Sosa, L. Estimation of states in photosynthetic systems via chained observers: design for a tertiary wastewater treatment by using Spirulina maxima on photobiorreactor. Rev. Mex. Ing. Quim. 2019, 18, 273–287. [Google Scholar] [CrossRef] [Green Version]
- Garzón-Castro, C.L.; Delgado-Aguilera, E.; Cortés-Romero, J.A.; Tello, E.; Mazzanti, G. Performance of an active disturbance rejection control on a simulated continuous microalgae photobioreactor. Comput. Chem. Eng. 2018, 117, 129–144. [Google Scholar] [CrossRef]
- Keesman, K.J.; Stigter, J.D. Optimal parametric sensitivity control for the estimation of kinetic parameters in bioreactors. Math. Biosci. 2002, 179, 95–111. [Google Scholar] [CrossRef]
- Fitzpatrick, J.J.; Gloanec, F.; Michel, E.; Blondy, J.; Lauzeral, A. Application of Mathematical Modelling to Reducing and Minimising Energy Requirement for Oxygen Transfer in Batch Stirred Tank Bioreactors. Chemengineering 2019, 3, 14. [Google Scholar] [CrossRef] [Green Version]
- Banerjee, S.; Ramaswamy, S. Dynamic process model and economic analysis of microalgae cultivation in flat panel photobioreactors. Algal Res. 2019, 39, 101445. [Google Scholar] [CrossRef]
- Mata, A.E.R.; Munoz, J.T.; Correa, J.R.P.; Bocanegra, A.R.D.; Luna, R.; Flores, G. Robust State Estimation in Presence of Parametric Uncertainty by NL-PI observers. An Application to Continuous Microbial Cultures. Lat. Am. Trans. IEEE 2016, 14, 1199–1205. [Google Scholar]
- Liu, W.C.; Inwood, S.; Gong, T.; Sharma, A.; Yu, L.Y.; Zhu, P. Fed-batch high-cell-density fermentation strategies for Pichia pastoris growth and production. Crit. Rev. Biotechnol. 2019, 39, 258–271. [Google Scholar] [CrossRef] [PubMed]
- Nwoba, E.G.; Parlevliet, D.A.; Laird, D.W.; Alameh, K.; Moheimani, N.R. Light management technologies for increasing algal photobioreactor efficiency. Algal Res. 2019, 39, 101433. [Google Scholar] [CrossRef]
- Yen, H.W.; Hu, I.C.; Chen, C.Y.; Nagarajan, D.; Chang, J.S. Design of photobioreactors for algal cultivation. In Biofuels from Algae; Elsevier: New York, NY, USA, 2019; pp. 225–256. [Google Scholar]
- Pruvost, J. Cultivation of algae in photobioreactors for biodiesel production. In Biofuels: Alternative Feedstocks and Conversion Processes for the Production of Liquid and Gaseous Biofuels; Elsevier: New York, NY, USA, 2019; pp. 629–659. [Google Scholar]
- Gustavsson, R. Development of Soft Sensors for Monitoring and Control of Bioprocesses; Linköping University Electronic Press: Linköping, Sweden, 2018; Volume 954. [Google Scholar]
- Parada, P.A.L.; Pettersen, E.; Bar, N. Bioreactor Scaling Enhances Feedback Control Of Concentration, Rates, and Yields. IFAC-PapersOnLine 2019, 52, 237–242. [Google Scholar] [CrossRef]
- Ramaswamy, S.; Cutright, T.; Qammar, H. Control of a continuous bioreactor using model predictive control. Process Biochem. 2005, 40, 2763–2770. [Google Scholar] [CrossRef]
- Nguyen, D.; Gadhamshetty, V.; Nitayavardhana, S.; Khanal, S.K. Automatic process control in anaerobic digestion technology: A critical review. Bioresour. Technol. 2015, 193, 513–522. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez-Mata, A.; Torres-Muñoz, J.; Domínguez-Bocanegra, A.; Flores, G.; Rangel-Peraza, G. Nonlinear robust control for a photobioreactor in prescence of parametric disturbances. Rev. Mex. Ing. Quim. 2016, 15, 985–993. [Google Scholar]
- Coutinho, D.; Vargas, A.; Feudjio, C.; Benavides, M.; Wouwer, A.V. A robust approach to the design of super-twisting observers–application to monitoring microalgae cultures in photo-bioreactors. Comput. Chem. Eng. 2019, 121, 46–56. [Google Scholar] [CrossRef]
- Farza, M.; Rodriguez-Mata, A.; Robles-Magdaleno, J.; M’Saad, M. A new filtered high gain observer design for the estimation of the components concentrations in a photobioreactor in microalgae culture. IFAC-PapersOnLine 2019, 52, 904–909. [Google Scholar] [CrossRef]
- De Andrade, G.A.; Pagano, D.J.; Guzmán, J.L.; Berenguel, M.; Fernández, I.; Acién, F.G. Distributed sliding mode control of pH in tubular photobioreactors. IEEE Trans. Contr. Syst. Tech. 2015, 24, 1160–1173. [Google Scholar] [CrossRef]
- Yadav, V.K.; Das, S.; Bhadauria, B.S.; Singh, A.K.; Srivastava, M. Stability analysis, chaos control of a fractional order chaotic chemical reactor system and its function projective synchronization with parametric uncertainties. Chin. J. Phys. 2017, 55, 594–605. [Google Scholar] [CrossRef]
- Duarte-Mermoud, M.A.; Aguila-Camacho, N.; Linares, R.C. Position control of the Thomson’s ring system using fractional operators. Int. J. Circ. Syst. Signal Process. 2015, 9, 344–352. [Google Scholar]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Comm. Nonlinear Sci. Numer. Simulat. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Zamani, M.; Karimi-Ghartemani, M.; Sadati, N.; Parniani, M. Design of a fractional order PID controller for an AVR using particle swarm optimization. Contr. Eng. Pract. 2009, 17, 1380–1387. [Google Scholar] [CrossRef]
- Maiti, D.; Biswas, S.; Konar, A. Design of a fractional order PID controller using particle swarm optimization technique. arXiv 2008, arXiv:0810.3776. Available online: https://arxiv.org/ftp/arxiv/papers/0810/0810.3776.pdf (accessed on 22 December 2019).
- Von Borries Segovia, M.A. Estudio y Simulación de Sistemas Adaptables Fraccionarios. Ph.D. Thesis, Universidad de Chile, Santiago, Chile, May 2012. [Google Scholar]
- Wang, Y.; Chen, J.; Yan, F.; Zhu, K.; Chen, B. Adaptive super-twisting fractional-order nonsingular terminal sliding mode control of cable-driven manipulators. ISA Trans. 2019, 86, 163–180. [Google Scholar] [CrossRef] [PubMed]
- Rabah, K.; Ladaci, S. A Fractional Adaptive Sliding Mode Control Configuration for Synchronizing Disturbed Fractional-Order Chaotic Systems. Circ. Syst. Signal Process. 2019, 39, 1244–1264. [Google Scholar] [CrossRef]
- Govea-Vargas, A.; Castro-Linares, R.; Duarte-Mermoud, M.; Aguila-Camacho, N.; Ceballos, G. Fractional Order Sliding Mode Control of a Class of Second Order Perturbed Nonlinear Systems: Application to the Trajectory Tracking of a Quadrotor. Algorithms 2018, 11, 168. [Google Scholar] [CrossRef] [Green Version]
- Luna, R.; López, F.; Pérez-Correa, J.R. Minimizing methanol content in experimental charentais alembic distillations. J. Ind. Eng. Chem. 2018, 57, 160–170. [Google Scholar] [CrossRef]
- Luna, R.; Matias-Guiu, P.; López, F.; Pérez-Correa, J.R. Quality aroma improvement of Muscat wine spirits: A new approach using first-principles model-based design and multi-objective dynamic optimisation through multi-variable analysis techniques. Food Bioprod. Process. 2019, 115, 208–222. [Google Scholar] [CrossRef]
- Brosilow, C.; Joseph, B. Techniques of Model-Based Control; Prentice Hall Professional: Hoboken, NJ, USA, 2002. [Google Scholar]
- He, L.; Subramanian, V.R.; Tang, Y.J. Experimental analysis and model-based optimization of microalgae growth in photo-bioreactors using flue gas. Biomass Bioenerg. 2012, 41, 131–138. [Google Scholar] [CrossRef]
- Vinagre, B.M.; Monje, C.A. Introducción al Control Fraccionario. Rev. Iberoam. Autom. In. 2009, 3, 5–23. [Google Scholar] [CrossRef]
- Kilbas, A.A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: New York, NY, USA, 2006. [Google Scholar]
- Tepljakov, A.; Petlenkov, E.; Belikov, J. Gain and order scheduled fractional-order PID control of fluid level in a multi-tank system. In Proceedings of the ICFDA’14 International Conference on Fractional Differentiation and Its Applications 2014, Catania, Italy, 23–25 June 2014; pp. 1–6. [Google Scholar]
- Utkin, V.I. Sliding Modes in Control and Optimization; Springer Science & Business Media: Berlin, Germany, 1992. [Google Scholar]
- Efe, M.Ö. Integral sliding mode control of a quadrotor with fractional order reaching dynamics. Trans. Inst. Meas. Contr. 2011, 33, 985–1003. [Google Scholar] [CrossRef]
- Dewasme, L.; Coutinho, D.; Wouwer, A.V. Adaptive and robust linearizing control strategies for fed-batch cultures of microorganisms exhibiting overflow metabolism. In Informatics in Control, Automation and Robotics; Cetto, J.A., Ferrier, J.L., Filipe, J., Eds.; Springer: Berlin, Germany, 2011; Volume 89, pp. 283–305. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| k | −30,119 |
| 1 | |
| 60.5 |
| Parameters | Plant | Reference Plant | Units |
|---|---|---|---|
| 0.027 | 0.027 | h | |
| 9.25 | 9.25 | mg/L | |
| 3.45 | 3.45 | - - - | |
| 205 | 205 | mg/L | |
| 600 | 540 | mg/L | |
| 80 | 60 | mg/L | |
| 0.001 | NA | L | |
| NA | 540 | mg/L | |
| NA | 60 | mg/L | |
| 3 | 3 | L | |
| NA | 0.001 | L/h |
| Parameters | Value |
|---|---|
| 5 | |
| 0.12 | |
| 0.12 | |
| 0.027 | |
| 25 | |
| 0.3, 0.6, 0.9, and 1 | |
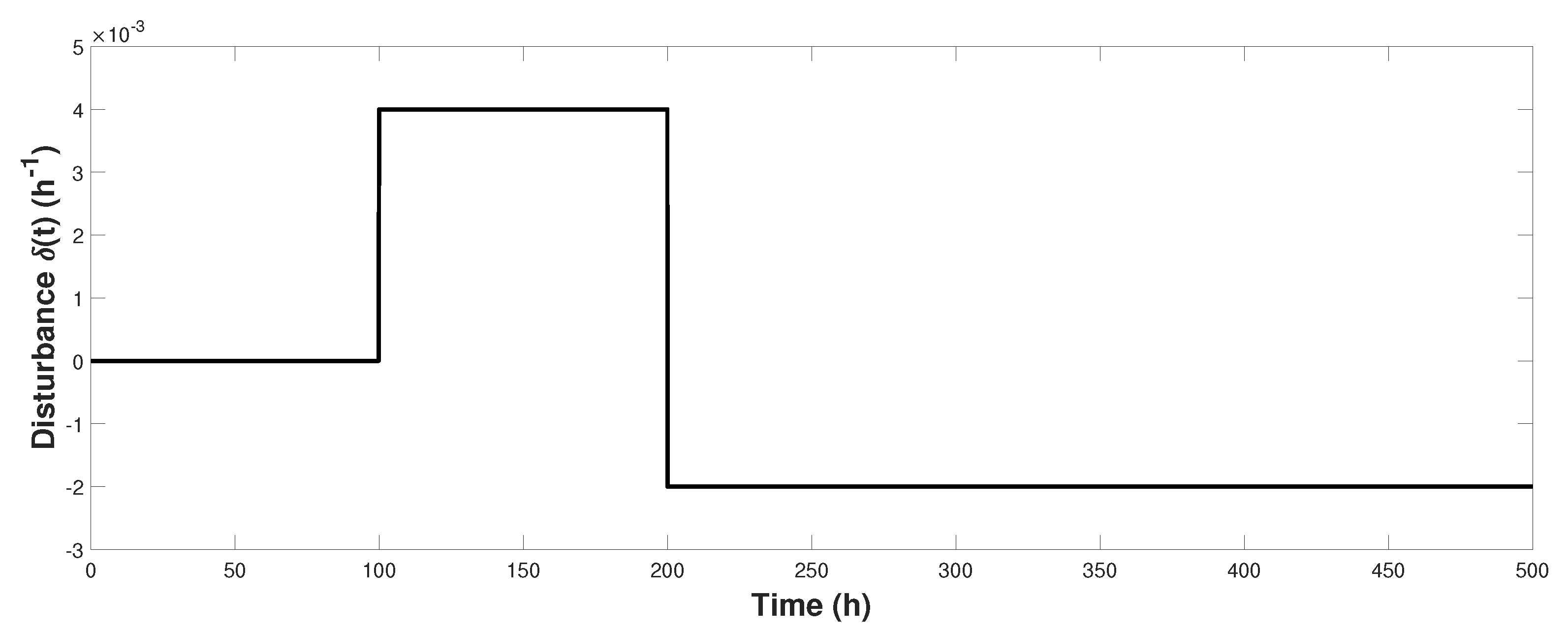
| see Figure 3 |
| Parameter | FOSMC | IMC |
|---|---|---|
| ITAE | 740.6 | 6.04e5 |
| IAE | 25 | 1863 |
| ISE | 347 | 1.59e4 |
| ISI | 0.6981 | 0.6801 |
| IAI | 13.53 | 13.3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Mata, A.E.; Luna, R.; Pérez-Correa, J.R.; Gonzalez-Huitrón, A.; Castro-Linares, R.; Duarte-Mermoud, M.A. Fractional Sliding Mode Nonlinear Procedure for Robust Control of an Eutrophying Microalgae Photobioreactor. Algorithms 2020, 13, 50. https://doi.org/10.3390/a13030050
Rodríguez-Mata AE, Luna R, Pérez-Correa JR, Gonzalez-Huitrón A, Castro-Linares R, Duarte-Mermoud MA. Fractional Sliding Mode Nonlinear Procedure for Robust Control of an Eutrophying Microalgae Photobioreactor. Algorithms. 2020; 13(3):50. https://doi.org/10.3390/a13030050
Chicago/Turabian StyleRodríguez-Mata, Abraham Efraim, Ricardo Luna, Jose Ricardo Pérez-Correa, Alejandro Gonzalez-Huitrón, Rafael Castro-Linares, and Manuel A. Duarte-Mermoud. 2020. "Fractional Sliding Mode Nonlinear Procedure for Robust Control of an Eutrophying Microalgae Photobioreactor" Algorithms 13, no. 3: 50. https://doi.org/10.3390/a13030050
APA StyleRodríguez-Mata, A. E., Luna, R., Pérez-Correa, J. R., Gonzalez-Huitrón, A., Castro-Linares, R., & Duarte-Mermoud, M. A. (2020). Fractional Sliding Mode Nonlinear Procedure for Robust Control of an Eutrophying Microalgae Photobioreactor. Algorithms, 13(3), 50. https://doi.org/10.3390/a13030050