Predictive Path Following and Collision Avoidance of Autonomous Connected Vehicles


Abstract
:1. Introduction
2. Problem Formulation
2.1. Vehicle Modeling
2.2. The Path-Following Problem
- Path Convergence: The system output converges to the set , i.e.,:
- Monotonous Forward Motion: The system moves along in the direction of increasing values of , i.e., and .
2.3. Map Representation Using Bézier Curves
3. Controller Synthesis
3.1. Nonlinear Predictive Path-Following Control
3.2. Collision Avoidance
- ,
3.3. Road Corridor Respect
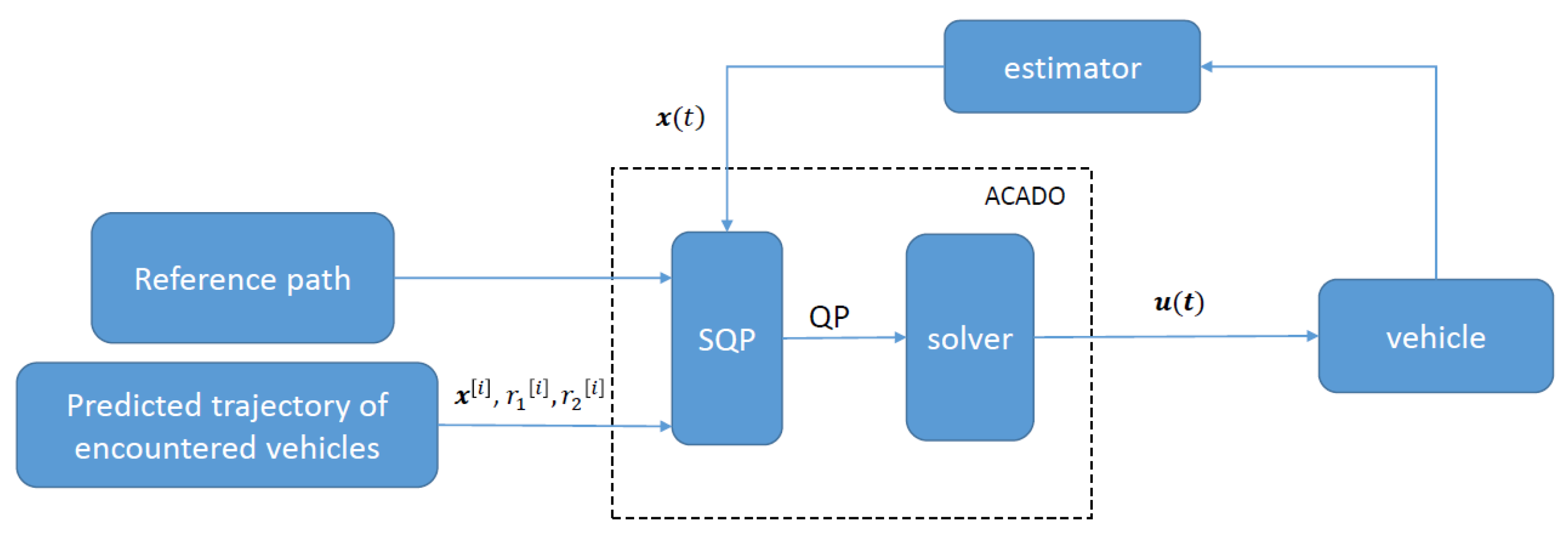
3.4. Optimization Problem Implementation
- The continuous state space model is symbolically defined using C-code or the MATLAB interface, then it is simplified employing automatic differentiation tools and using zero entries in the Jacobian matrix. The result is an efficient real time C-code for the integration of the continuous nonlinear system which will be used for the prediction.
- The optimization problem cost function and constraints are symbolically defined, parametrized by the aforementioned direct multiple shooting technique, and the resulting, large but sparse, Quadratic Problem (QP) is condensed.
- The discretized QP is then solved using qpOASES solver.
| Algorithm 1 NMPC Algorithm for Path Following. |
| 1: Set the time index , the sampling interval , the prediction horizon , weight matrices Q and R. |
| 2: Measure the values of the states or estimate them. |
| 3: Solve the optimization Problem (16) over the discrete time instants and get the optimal control sequence and the corresponding predicted states . |
| 4: Apply only the first control element . |
| 5: wait for the next sample and set the time index , then go to step 2. |
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rauh, A.; Kersten, J.; Auer, E.; Aschemann, H. Sensitivity-based feedforward and feedback control for uncertain systems. Computing 2012, 94, 357–367. [Google Scholar] [CrossRef]
- Beyersdorfer, S.; Wagner, S. Novel model based path planning for multi-axle steered heavy load vehicles. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; pp. 424–429. [Google Scholar] [CrossRef]
- Wang, J.; Steiber, J.; Surampudi, B.; Member, S. Autonomous Ground Vehicle Control System for High-Speed and Safe Operation. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 218–223. [Google Scholar]
- Quirynen, R.; Berntorp, K.; Cairano, S.D. Embedded Optimization Algorithms for Steering in Autonomous Vehicles based on Nonlinear Model Predictive Control. In Proceedings of the Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 3251–3256. [Google Scholar] [CrossRef]
- Abbas, M.A.; Milman, R.; Eklund, J.M. Obstacle Avoidance in Real Time with Nonlinear Model Predictive Control of Autonomous Vehicles. Can. J. Electr. Comput. Eng. 2017, 40, 12–22. [Google Scholar] [CrossRef]
- Abdelaal, M. Nonlinear Model Predictive Control for Trajectory Tracking and Collision Avoidance of Surface Vessels. Ph.D. Thesis, University of Oldenburg, Oldenburg, Germany, 2018. [Google Scholar] [CrossRef]
- Pereira, G.C. Model Predictive Control for Autonomous Driving of Over-Actuated Research Vehicle. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2016. [Google Scholar]
- Liniger, A.; Domahidi, A.; Morari, M. Optimization-based autonomous racing of 1: 43 scale RC cars. Optim. Control Appl. Methods 2015, 36, 628–647. [Google Scholar] [CrossRef] [Green Version]
- Hult, R.; Zanon, M.; Gros, S.; Falcone, P. Optimal Coordination of Automated Vehicles at Intersections: Theory and Experiments. In Proceedings of the European Control Conference, Naples, Italy, 25–28 June 2019. [Google Scholar] [CrossRef]
- Brüdigam, T.; Ahmic, K.; Leibold, M.; Wollherr, D. Legible Model Predictive Control for Autonomous Driving on Highways. IFAC-PapersOnLine 2018, 51, 215–221. [Google Scholar] [CrossRef]
- Rick, M.; Clemens, J.; Sommer, L.; Folkers, A.; Schill, K.; Büskens, C. Autonomous Driving Based on Nonlinear Model Predictive Control and Multi-Sensor Fusion. IFAC-PapersOnLine 2019, 52, 182–187. [Google Scholar] [CrossRef]
- Yi, B.; Bender, P.; Bonarens, F.; Stiller, C. Model Predictive Trajectory Planning for Automated Driving. IEEE Trans. Intell. Veh. 2018, 4, 24–38. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control; Springer: Berlin, Germany, 2006; p. 470. [Google Scholar]
- Alrifaee, B. Collision Avoidance Networked Model Predictive Control for Vehicle Collision Avoidance. Ph.D. Thesis, RWTH Aachen University, Aachen, Germany, 2017. [Google Scholar] [CrossRef]
- Polack, P.; Altché, F.; D’Andréa-Novel, B.; De La Fortelle, A. Guaranteeing Consistency in a Motion Planning and Control Architecture Using a Kinematic Bicycle Model. In Proceedings of the American Control Conference, Milwaukee, WI, USA, 27–29 June 2018; pp. 3981–3987. [Google Scholar] [CrossRef] [Green Version]
- Guanetti, J.; Kim, Y.; Borrelli, F. Control of connected and automated vehicles: State of the art and future challenges. Annu. Rev. Control 2018, 45, 18–40. [Google Scholar] [CrossRef] [Green Version]
- Abdelaal, M.; Schön, S. Distributed Nonlinear Model Predictive Control for Connected Vehicles Trajectory Tracking and Collision Avoidance with Ellipse Geometry. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019; pp. 2100–2111. [Google Scholar]
- Faulwasser, T.; Matschek, J.; Zometa, P.; Findeisen, R. Predictive path-following control: Concept and implementation for an industrial robot. In Proceedings of the IEEE International Conference on Control Applications, Hyderabad, India, 28–30 August 2013; pp. 128–133. [Google Scholar] [CrossRef]
- Godoy, J.; Artuñedo, A.; Villagra, J. Self-Generated OSM-Based Driving Corridors. IEEE Access 2019, 7, 20113–20125. [Google Scholar] [CrossRef]
- Borrelli, H.; Boehm, W.; Paluszny, M. Bézier and B-Spline Techniques; Springer: Berlin, Germany, 2002. [Google Scholar]
- Rubagotti, M.; Raimondo, D.M.; Ferrara, A.; Magni, L. Robust model predictive control with integral sliding mode in continuous-time sampled-data nonlinear systems. IEEE Trans. Autom. Control 2011, 56, 556–570. [Google Scholar] [CrossRef] [Green Version]
- Borrelli, F.; Bemporad, A.; Morari, M. Explicit Nonlinear Model Predictive Control: Theory and Applications; Springer: Berlin, Germany, 2012. [Google Scholar]
- Tsang, T.; Himmelblau, D.; Edgar, T. Optimal control via collocation and nonlinear programming. Int. J. Control 1975, 21, 763–768. [Google Scholar] [CrossRef]
- Bock, H.G.; Plitt, K.J. Multiple Shooting Algorithm for Direct Solution of Optimal Control Problems. In Proceedings of the 9th IFAC World Congress, Budapest, Hungary, 2–6 July 1984; Elsevier: Budapest, Hungary, 1985; Volume 17, pp. 1603–1608. [Google Scholar] [CrossRef]
- Bock, H.G. Recent Advances in Parameter identification Techniques for O.D.E. In Numerical Treatment of Inverse Problems in Differential and Integral Equations: Progress in Scientific Computing; Birkhäuser: Basel, Sweden, 1983; Volume 2, pp. 95–121. [Google Scholar] [CrossRef]
- Houska, B.; Ferreau, H.J.; Diehl, M. ACADO toolkit-An open-source framework for automatic control and dynamic optimization. Optim. Control Appl. Methods 2011, 32, 298–312. [Google Scholar] [CrossRef]
- Jin, X.; Yin, G.; Chen, N. Advanced estimation techniques for vehicle system dynamic state: A survey. Sensors 2019, 19, 1–26. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kong, J.; Pfeiffer, M.; Schildbach, G.; Borrelli, F. Kinematic and Dynamic Vehicle Models for Autonomous Driving Control Design. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015 ; pp. 2–7. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelaal, M.; Schön, S. Predictive Path Following and Collision Avoidance of Autonomous Connected Vehicles. Algorithms 2020, 13, 52. https://doi.org/10.3390/a13030052
Abdelaal M, Schön S. Predictive Path Following and Collision Avoidance of Autonomous Connected Vehicles. Algorithms. 2020; 13(3):52. https://doi.org/10.3390/a13030052
Chicago/Turabian StyleAbdelaal, Mohamed, and Steffen Schön. 2020. "Predictive Path Following and Collision Avoidance of Autonomous Connected Vehicles" Algorithms 13, no. 3: 52. https://doi.org/10.3390/a13030052
APA StyleAbdelaal, M., & Schön, S. (2020). Predictive Path Following and Collision Avoidance of Autonomous Connected Vehicles. Algorithms, 13(3), 52. https://doi.org/10.3390/a13030052