On a Nonsmooth Gauss–Newton Algorithms for Solving Nonlinear Complementarity Problems


Abstract
:1. Introduction
- engineering—optimal control problems, contact or structural mechanics problems, structural design problems, or traffic equilibrium problems,
- equilibrium modeling—general equilibrium (in production or consumption), invariant capital stock, or game-theoretic models.
2. Materials and Methods
2.1. Preliminaries
2.2. The Algorithm and Its Convergence
| Algorithm 1: The damped Gauss-Newton method for solving NCP |
| Let be given. Let be a starting point. Given , the steps for obtaining are: Step 1: If , then stop. Otherwise, choose any matrix and let . Step 2: Let . Step 3: Find that is a solution of the linear system |
| Algorithm 2: The inexact version of the damped Gauss-Newton method for solving NCP |
| Let and for all k given. Let be a starting point. Given , the steps for obtaining are: Step 1: If , then stop. Otherwise, choose any matrix and let . Step 2: Let . Step 3: Find that is a solution of the linear system Step 5: Compute the smallest nonnegative integer such that |
3. Numerical Results
- -
- non-degenerate
- -
- degenerate
4. Conclusions
Funding
Conflicts of Interest
References
- Mangasarian, O.L. Equivalence of the complementarity problem to a system of nonlinear equations. SIAM J. Appl. Math. 1976, 31, 89–92. [Google Scholar] [CrossRef] [Green Version]
- Harker, P.T.; Pang, J.S. Finite-dimensional variational inequality and nonlinear complementarity problems: A survey of theory, algorithms and applications. Math. Program. 1990, 48, 161–220. [Google Scholar] [CrossRef]
- Ferris, M.C.; Pang, J.S. Engineering and economic applications of complementarity problems. SIAM Rev. 1997, 39, 669–713. [Google Scholar] [CrossRef] [Green Version]
- Ortega, J.M.; Rheinboldt, W.C. Iterative Solution of Nonlinear Equations in Several Variables; Academic Press: New York, NY, USA, 1970. [Google Scholar]
- Chen, J.; Li, W. Local convergence of Gauss–Newton’s like method in weak conditions. J. Math. Anal. Appl. 2006, 324, 381–394. [Google Scholar] [CrossRef] [Green Version]
- Fan, J.; Pan, J. On the convergence rate of the inexact Levenberg-Marquardt method. J. Ind. Manag. Optim. 2011, 7, 199–210. [Google Scholar] [CrossRef]
- Yamashita, N.; Fukushima, M. On the Rate of Convergence of the Levenberg-Marquardt Method. J. Comput. Suppl. 2001, 15, 227–238. [Google Scholar]
- De Luca, T.; Facchinei, F.; Kanzow, C.T. A theoretical and numerical comparison of some semismooth algorithms for complementarity problems. Comp. Optim. Appl. 2000, 16, 173–205. [Google Scholar] [CrossRef]
- Xiu, N.; Zhang, J. A smoothing Gauss–Newton method for the generalized HLCP. J. Comput. Appl. Math. 2001, 129, 195–208. [Google Scholar] [CrossRef] [Green Version]
- Subramanian, P.K.; Xiu, N.H. Convergence analysis of Gauss–Newton method for the complemetarity problem. J. Optim. Theory Appl. 1997, 94, 727–738. [Google Scholar] [CrossRef]
- Martínez, J.M.; Qi, L. Inexact Newton method for solving nonsmooth equations. J. Comput. Appl. Math. 1995, 60, 127–145. [Google Scholar] [CrossRef] [Green Version]
- Bao, J.F.; Li, C.; Shen, W.P.; Yao, J.C.; Guu, S.M. Approximate Gauss–Newton methods for solving underdetermined nonlinear least squares problems. App. Num. Math. 2017, 111, 92–110. [Google Scholar] [CrossRef]
- Cartis, C.; Roberts, L. A derivative-free Gauss–Newton method. Math. Program. Comput. 2019, 11, 631–674. [Google Scholar] [CrossRef] [Green Version]
- Clarke, F.H. Optimization and Nonsmooth Analysis; John Wiley & Sons: New York, NY, USA, 1983. [Google Scholar]
- Qi, L. Convergence analysis of some algorithms for solving nonsmooth equations. Math. Oper. Res. 1993, 18, 227–244. [Google Scholar] [CrossRef]
- Mifflin, R. Semismooth and semiconvex functions in constrained optimization. SIAM J. Control Optim. 1977, 15, 142–149. [Google Scholar] [CrossRef] [Green Version]
- Qi, L.; Sun, D. A nonsmooth version of Newton’s method. Math. Program. 1993, 58, 353–367. [Google Scholar] [CrossRef]
- Pang, J.S.; Qi, L. Nonsmooth equations: Motivation and algorithms. SIAM J. Optim. 1993, 3, 443–465. [Google Scholar] [CrossRef]
- Ulbrich, M. Nonmonotone trust-region methods for bound-constrained semismooth systems of equations with applications to nonlinear mixed complementarity problems. SIAM J. Optim. 2001, 11, 889–917. [Google Scholar] [CrossRef]
- Kojima, M.; Shindo, S. Extensions of Newton and quasi-Newton methods to systems of PC1-equations. J. Oper. Res. Soc. Jpn. 1986, 29, 352–374. [Google Scholar] [CrossRef]
- Jiang, H.; Qi, L. A new nonsmooth equations approach to nonlinear complementarity problems. SIAM J. Control Optim. 1997, 35, 178–193. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, G.; Li, W.; Li, N. Multi-strategy monarch butterfly optimization algorithm for discounted 0–1 knapsack problem. Neural Comput. Appl. 2018, 30, 3019–3036. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Wang, G. A novel monarch butterfly optimization with global position updating operator for large-scale 0–1 knapsack problems. Mathematics 2019, 7, 1056. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; Deb, S.; Coelho, L.D. Earthworm optimisation algorithm: A bio-inspired metaheuristic algorithm for global optimisation problems. Int. J. Biol. Inspired Comput. 2018, 12, 1–22. [Google Scholar] [CrossRef]
- Wang, G.; Deb, S.; Coelho, L.D. Elephant herding optimization. In Proceedings of the 2015 3rd International Symposium on Computational and Business Intelligence (ISCBI), Bali, Indonesia, 7–9 December 2015; pp. 1–5. [Google Scholar]
- Wang, G.; Deb, S.; Gao, X.; Coelho, L.D. A new metaheuristic optimisation algorithm motivated by elephant herding behaviour. Int. J. Biol. Inspired Comput. 2016, 8, 394–409. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, G. Binary moth search algorithm for discounted 0-1 knapsack problem. IEEE Access 2018, 6, 10708–10719. [Google Scholar] [CrossRef]
- Wang, G. Moth search algorithm: A bio-inspired metaheuristic algorithm for global optimization problems. Memet. Comput. 2018, 10, 151–164. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
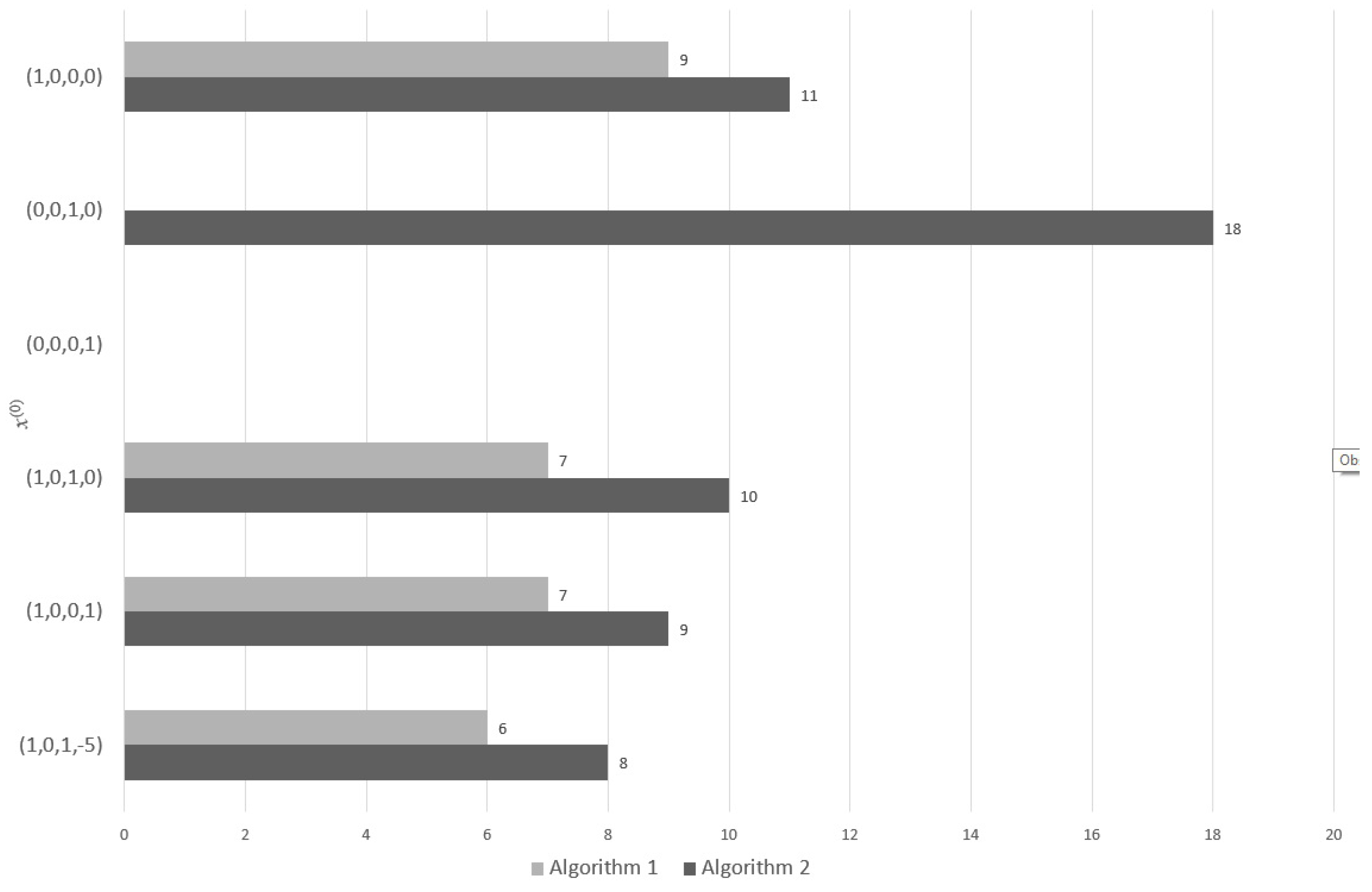
| x | Solution | ||
|---|---|---|---|
| 9 | 11 | ||
| failed | 18 | ||
| failed | failed | - | |
| 7 | 10 | ||
| 7 | 9 | ||
| 6 | 8 |
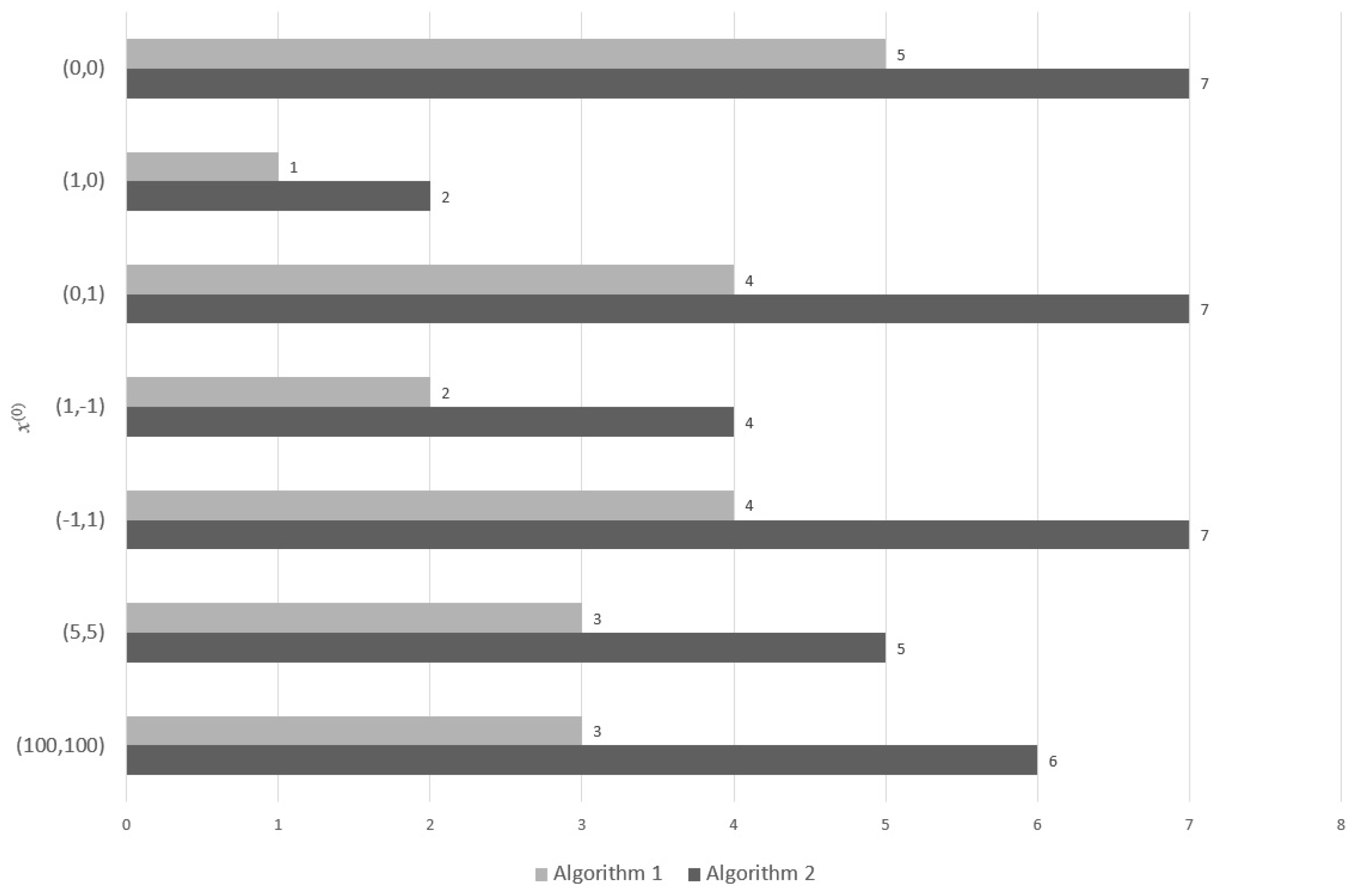
| x | Solution | ||
|---|---|---|---|
| 5 | 7 | ||
| 1 | 2 | ||
| 4 | 7 | ||
| 2 | 4 | ||
| 4 | 7 | ||
| 3 | 5 | ||
| 3 | 6 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Śmietański, M.J. On a Nonsmooth Gauss–Newton Algorithms for Solving Nonlinear Complementarity Problems. Algorithms 2020, 13, 190. https://doi.org/10.3390/a13080190
Śmietański MJ. On a Nonsmooth Gauss–Newton Algorithms for Solving Nonlinear Complementarity Problems. Algorithms. 2020; 13(8):190. https://doi.org/10.3390/a13080190
Chicago/Turabian StyleŚmietański, Marek J. 2020. "On a Nonsmooth Gauss–Newton Algorithms for Solving Nonlinear Complementarity Problems" Algorithms 13, no. 8: 190. https://doi.org/10.3390/a13080190
APA StyleŚmietański, M. J. (2020). On a Nonsmooth Gauss–Newton Algorithms for Solving Nonlinear Complementarity Problems. Algorithms, 13(8), 190. https://doi.org/10.3390/a13080190