A Class of Spline Functions for Solving 2-Order Linear Differential Equations with Boundary Conditions


Abstract
:1. Introduction
2. Preliminary
3. Derivation of The Method
3.1. Definition of the Piecewise Spline Functions
3.2. Continuity Condition
- If and , then from (7) we havewhere
- If and , then from (7) we havewhere
- If and , then from (7) we havewhere
- If and , then from (7) we havewhere
- If and , then from (7) we havewhere
- If and , then from (7) we havewhere
- If and , then from (7) we havewhere
- If and , then from (7) we havewhere
- If and , then from (7) we have
4. Truncation Error Estimation
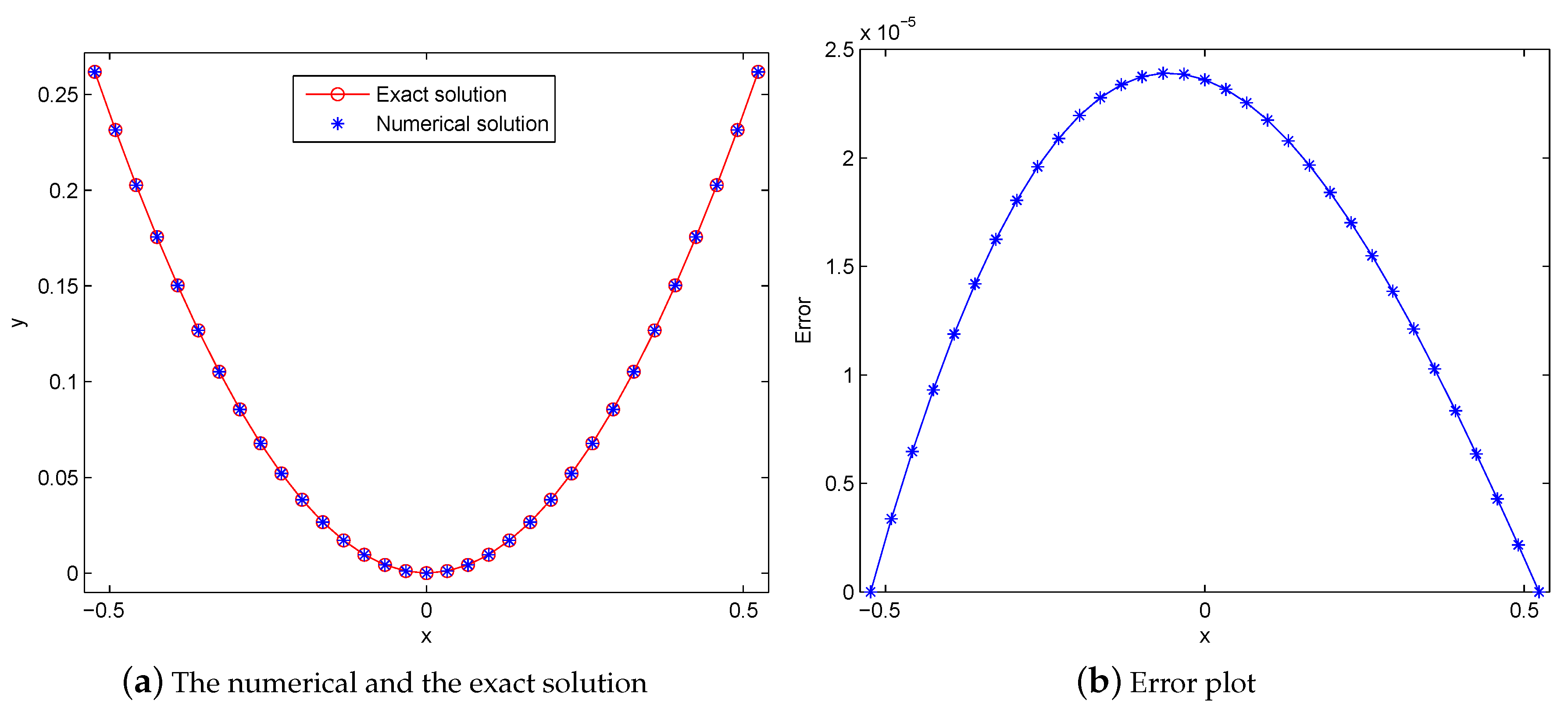
5. Numerical Examples
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Griffiths, D.F.; Higham, D.J. Numerical Methods for Ordinary Differential Equations; Springer: London, UK, 2010. [Google Scholar]
- Usmani, R.A. The use of quartic splines in the numerical solution of a fourth-order boundary value problem. J. Comput. Appl. Math. 1992, 44, 187–200. [Google Scholar] [CrossRef] [Green Version]
- Ramadan, M.A.; Lashien, I.F.; Zahra, W.K. Polynomial and nonpolynomial spline approaches to the numerical solution of second order boundary value problems. Appl. Math. Comput. 2007, 184, 476–484. [Google Scholar] [CrossRef]
- Ramadan, M.A.; Lashien, I.F.; Zahra, W.K. High order accuracy nonpolynomial spline solutions for 2μth order two point boundary value problems. Appl. Math. Comput. 2008, 204, 920–927. [Google Scholar] [CrossRef]
- Srivastava, P.K.; Kumar, M.; Mohapatra, R.N. Quintic nonpolynomial spline method for the solution of a second order boundary-value problem with engineering applications. Comput. Math. Appl. 2011, 62, 1707–1714. [Google Scholar] [CrossRef] [Green Version]
- Noor, M.A.; Tirmizi, I.A.; Khan, M.A. Quadratic non-polynomial spline approach to the solution of a system of second order boundary-value problems. Appl. Math. Comput. 2007, 179, 153–160. [Google Scholar]
- Zahra, W.K.; Mhlawy, A.M.E. Numerical solution of two-parameter singularly perturbed boundary value problems via exponential spline. J. King Saud Univ. Sci. 2013, 25, 201–208. [Google Scholar] [CrossRef] [Green Version]
- Lodhi, R.K.; Mishra, H.K. Quintic B-spline method for solving second order linear and nonlinear singularly perturbed two-point boundary value problems. J. Comput. Appl. Math. 2017, 319, 170–187. [Google Scholar] [CrossRef]
- Zahra, W.K. A smooth approximation based on exponential spline solutions for nonlinear fourth order two point boundary value problems. Appl. Math. Comput. 2011, 217, 8447–8457. [Google Scholar] [CrossRef]
- Al-Said, E.A.; Noor, M.A. Quartic spline method for solving fourth order obstacle boundary value problems. J. Comput. Appl. Math. 2002, 143, 107–116. [Google Scholar] [CrossRef] [Green Version]
- Ideon, E.; Oja, P. Linear/linear rational spline collocation for linear boundary value problems. J. Comput. Appl. Math. 2014, 263, 32–44. [Google Scholar] [CrossRef]
- Rashidinia, J.; Ghasemi, M. B-spline collocation for solution of two-point boundary value problems. J. Comput. Appl. Math. 2011, 235, 2325–2342. [Google Scholar] [CrossRef] [Green Version]
- Wanner, G. Solving Ordinary Differential Equations II; Springer: Berlin/Heidelberg, Germany, 1991. [Google Scholar]
- Ahmad, G.I.; Shelly, A.; Kukreja, V.K. Cubic Hermite Collocation Method for Solving Boundary Value Problems with Dirichlet, Neumann, and Robin Conditions. Int. J. Eng. Math. 2014, 2014, 365209. [Google Scholar]
- Ge, Y.; Cao, F. Multigrid method based on the transformation-free HOC scheme on nonuniform grids for 2D convection diffusion problems. J. Comput. Phys. 2011, 230, 4051–4070. [Google Scholar] [CrossRef]


{kind=link}
| x | x | x | ||||||
|---|---|---|---|---|---|---|---|---|
| −2.000 | −0.406006 | −0.406006 | −1.625 | −0.516883 | −0.516893 | −1.250 | −0.644628 | −0.644636 |
| −1.875 | −0.440891 | −0.440896 | −1.500 | −0.557815 | −0.557825 | −1.125 | −0.689882 | −0.689886 |
| −1.750 | −0.477870 | −0.477878 | −1.375 | −0.600484 | −0.600494 | −1.000 | −0.735759 | −0.735759 |
| Example 1 | Example 2 | Example 3 | |||||
|---|---|---|---|---|---|---|---|
| – | 8 | – | 4 | ||||
| 2.0084 | 32 | 1.9926 | 16 | ||||
| 2.0039 | 128 | 1.9962 | 64 | ||||
| 2.0026 | 512 | 1.9974 | 256 | ||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Han, X.; Li, J. A Class of Spline Functions for Solving 2-Order Linear Differential Equations with Boundary Conditions. Algorithms 2020, 13, 231. https://doi.org/10.3390/a13090231
Liu C, Han X, Li J. A Class of Spline Functions for Solving 2-Order Linear Differential Equations with Boundary Conditions. Algorithms. 2020; 13(9):231. https://doi.org/10.3390/a13090231
Chicago/Turabian StyleLiu, Chengzhi, Xuli Han, and Juncheng Li. 2020. "A Class of Spline Functions for Solving 2-Order Linear Differential Equations with Boundary Conditions" Algorithms 13, no. 9: 231. https://doi.org/10.3390/a13090231
APA StyleLiu, C., Han, X., & Li, J. (2020). A Class of Spline Functions for Solving 2-Order Linear Differential Equations with Boundary Conditions. Algorithms, 13(9), 231. https://doi.org/10.3390/a13090231