
Fault Diagnosis Algorithm Based on Adjustable Nonlinear PI State Observer and Its Application in UAV Fault Diagnosis

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Fault diagnosis algorithm based on dataThe data-based fault diagnosis algorithm mainly uses statistical methods to obtain the characteristics of the data, and constructs the detection threshold through statistics to diagnose the fault. Furthermore, some intelligent algorithms, such as support vector machine (SVM), K-nearest neighbor (KNN) and so on, are also used in fault diagnosis [2,3]. However, most of the data-based fault diagnosis methods are used for fault detection and identification, and it is difficult to estimate the fault amplitude.
- Model based fault diagnosis algorithmThe model-based fault diagnosis algorithm usually needs to accurately model the diagnosis object [4], and obtain the system state by comparing the reference model output with the actual output, so as to judge whether there is a fault in the system [5]. Although this method has high accuracy and reliability, it often takes a lot of energy to accurately model the diagnosis object.
2. System Model and PI State Observer
3. Nonlinear State Observer
- When the error between the estimated state and the system state is large, the state observer can achieve fast tracking;
- When the error between the estimated state and the system state is small, the state observer can achieve stable tracking.
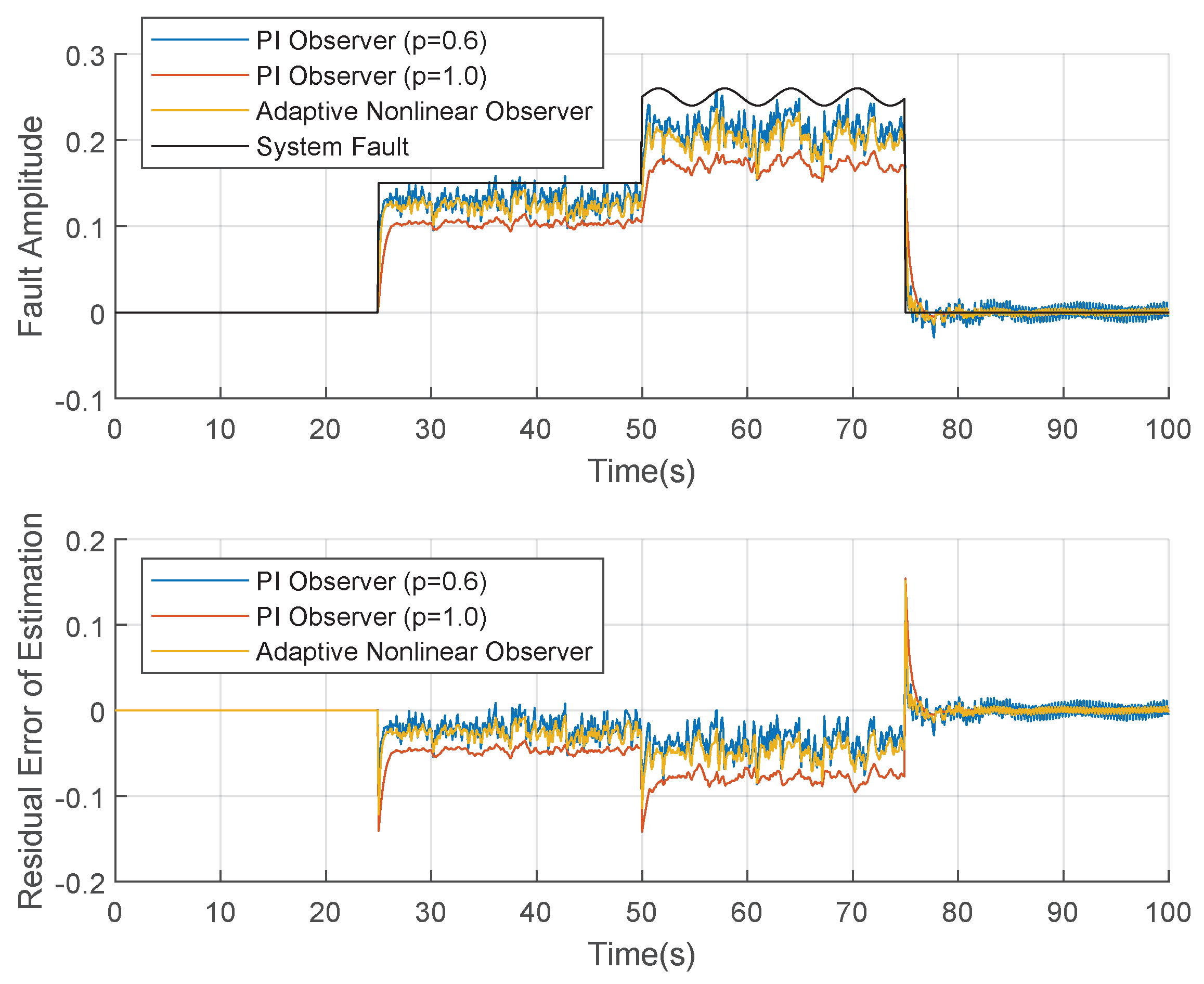
4. Numerical Simulation
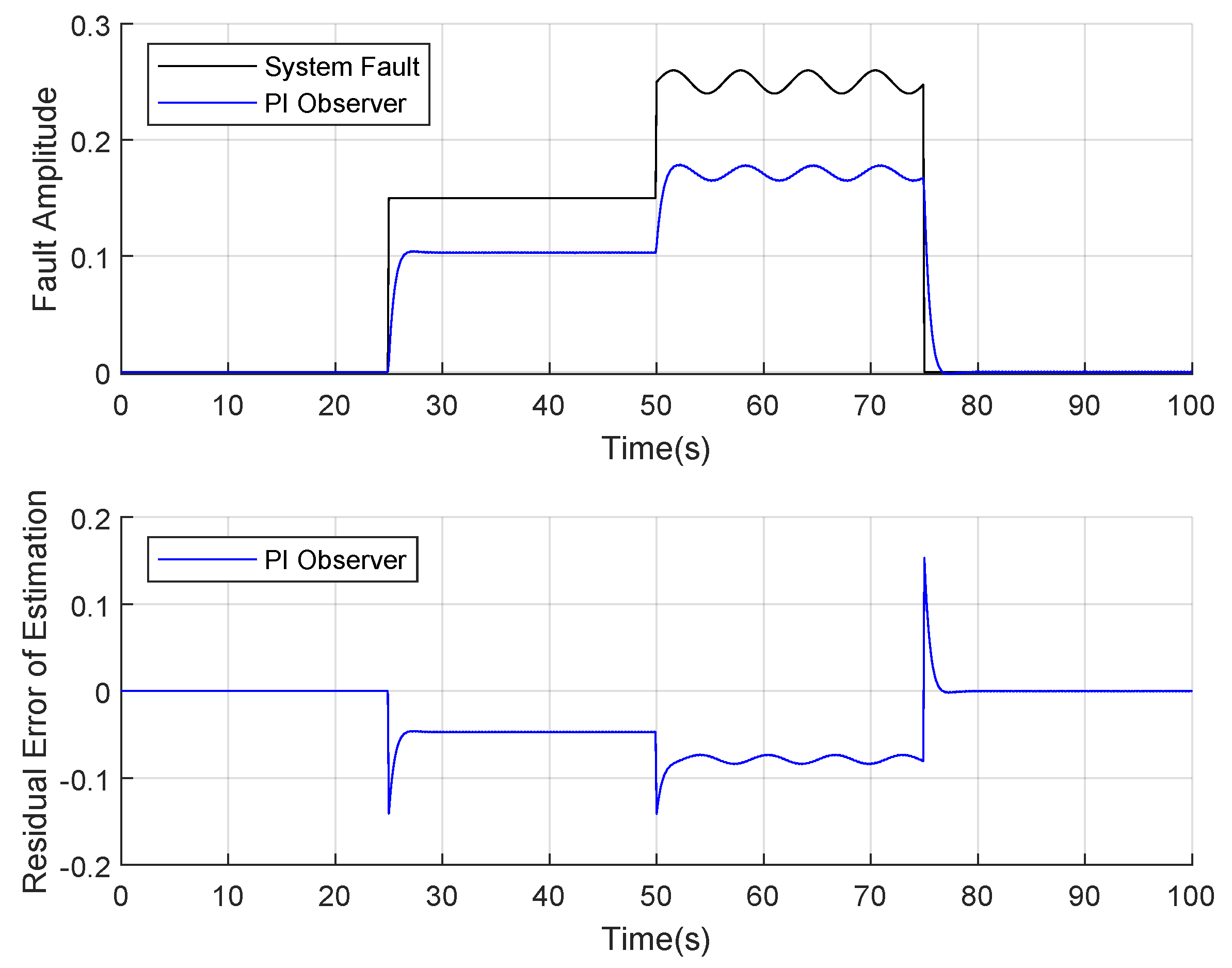
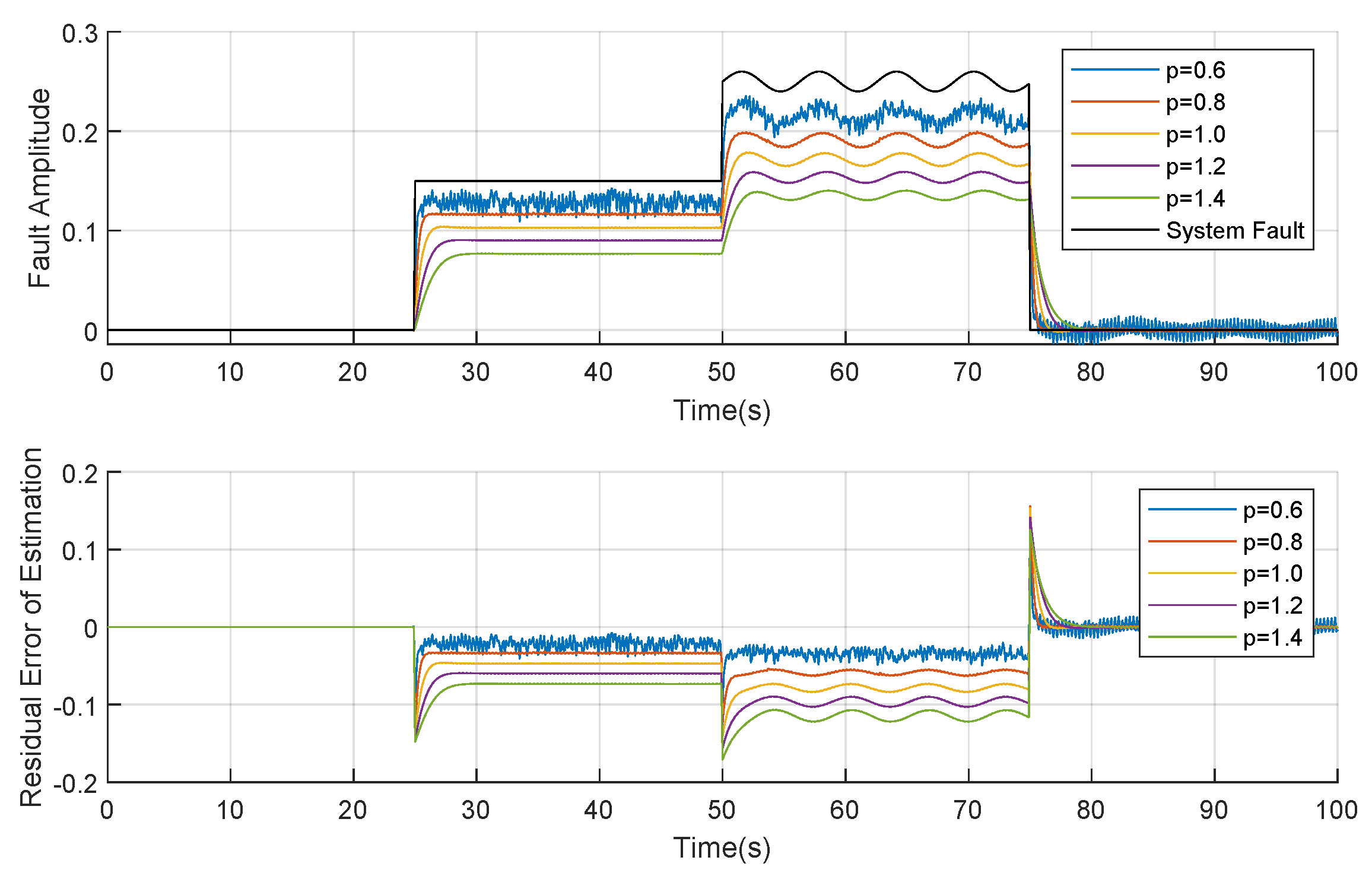
- Step fault. There is a fixed error between the measured output of the sensor and the actual value of the measured parameter. It is mainly caused by bias current or bias voltage.
- Periodic fault. The error caused by the superposition of the measured output value of the sensor with the signal of a certain frequency. It mainly includes power signal interference and so on.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sharma, V. A Review on Vibration-Based Fault Diagnosis Techniques for Wind Turbine Gearboxes Operating Under Nonstationary Conditions. J. Inst. Eng. India Ser. C 2021, 102, 507–523. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Ding, S.X.; Huang, B. Data-Driven Fault Diagnosis for Traction Systems in High-Speed Trains: A Survey, Challenges, and Perspectives. IEEE Trans. Intell. Transp. Syst. 2020, 50, 1–17. [Google Scholar] [CrossRef]
- Wang, H.; Chai, T.Y.; Ding, J.L.; Brown, M. Data Driven Fault Diagnosis and Fault Tolerant Control: Some Advances and Possible New Directions. Acta Autom. Sin. 2009, 35, 739–747. [Google Scholar] [CrossRef] [Green Version]
- Leonhardt, S.; Ayoubi, M. Methods of fault diagnosis. Control Eng. Pract. 1997, 5, 683–692. [Google Scholar] [CrossRef]
- Saravanakumar, R.; Krishnaraj, N.; Venkatraman, S.; Sivakumar, B.; Prasanna, S.; Shankar, K. Hierarchical symbolic analysis and particle swarm optimization based fault diagnosis model for rotating machineries with deep neural networks. Meas. J. Int. Meas. Confed. 2021, 171, 108771. [Google Scholar] [CrossRef]
- Hui, Y.; Luo, Q.; Yong, L. Application of wavelet and multi-kernel SVM in UAV sensors fault diagnosis. Electron. Meas. Technol. 2014, 37, 112–116. [Google Scholar]
- Guzmán-Rabasa, J.A.; López-Estrada, F.R.; González-Contreras, B.M.; Valencia-Palomo, G.; Chadli, M.; Pérez-Patricio, M. Actuator fault detection and isolation on a quadrotor unmanned aerial vehicle modeled as a linear parameter-varying system. Meas. Control UK 2019, 52. [Google Scholar] [CrossRef] [Green Version]
- Zhong, W.; Xin, C. Fault Detection of UAV Fault Based on a SFUKF. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Bangkok, Thailand, 17–19 May 2019; Volume 563, p. 052099. [Google Scholar] [CrossRef]
- Frank, P.P.R.; Clark, R. Fault Diagnosis in Dynamic Systems: Theory and Applications; Prentice-Hall, Inc.: Hoboken, NJ, USA, 1989; pp. 821–828. [Google Scholar]
- Frank, P.M. Fault diagnosis in dynamic systems using analytical and knowledge-based redundancy. A survey and some new results. Automatica 1990, 26, 450–472. [Google Scholar] [CrossRef]
- Jiang, J. Robust model-based fault diagnosis for dynamic systems. Automatica 2002, 38, 1089–1091. [Google Scholar] [CrossRef]
- Bakhshande, F.; Söffker, D. Proportional-Integral-Observer: A brief survey with special attention to the actual methods using ACC Benchmark. IFAC Pap. 2015, 48, 532–537. [Google Scholar] [CrossRef]
- Boghdady, T.A.; Sayed, M.M.; Emam, A.M.; El-Zahab, E. A Novel Technique for PID Tuning by Linearized Biogeography-Based Optimization. In Proceedings of the IEEE International Conference on Computational Science & Engineering, Porto, Portugal, 21–23 October 2015. [Google Scholar]
- Jiang, B.; Wang, J.L.; Soh, Y.C. An adaptive technique for robust diagnosis of faults with independent effects on system outputs. Int. J. Control 2002, 75, 792–802. [Google Scholar] [CrossRef]
- Ding, S.X.; Li, L.; Krüger, M. Application of randomized algorithms to assessment and design of observer-based fault detection systems. Automatica 2019, 107, 175–182. [Google Scholar] [CrossRef]
- Gómez-Peñate, S.; López-Estrada, F.R.; Valencia-Palomo, G.; Rotondo, D.; Guerrero-Sánchez, M.E. Actuator and sensor fault estimation based on a proportional multiple-integral sliding mode observer for linear parameter varying systems with inexact scheduling parameters. Int. J. Robust Nonlinear Control 2020, 30, 5322–5340. [Google Scholar] [CrossRef]
- Rotondo, D.; Cristofaro, A.; Johansen, T.A.; Nejjari, F.; Puig, V. Robust fault and icing diagnosis in unmanned aerial vehicles using LPV interval observers. Int. J. Robust Nonlinear Control 2019, 29, 5456–5480. [Google Scholar] [CrossRef]
- Isermann, R. Supervision, fault-detection and fault-diagnosis methods—An introduction. Control. Eng. Pract. 1997, 5, 639–652. [Google Scholar] [CrossRef]
- Zhang, J.; Swain, A.K.; Nguang, S.K. Robust H-infinity adaptive descriptor observer design for fault estimation of uncertain nonlinear systems. J. Frankl. Inst. 2014, 351, 5162–5181. [Google Scholar] [CrossRef]
- Sadeghzadeh, I.; Mehta, A.; Chamseddine, A.; Zhang, Y. Active Fault Tolerant Control of a quadrotor UAV based on gainscheduled PID control. In Proceedings of the 2012 25th IEEE Canadian conference on electrical and computer engineering (CCECE), Montreal, QC, Canada, 29 April–2 May 2012. [Google Scholar] [CrossRef]
- Wang, X.S. Research of fuzzy PID control based on VHDL. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Bäch, Switzerland, 2013; Volumes 416–417. [Google Scholar] [CrossRef]
- Shahnazari, H.; Mhaskar, P.; House, J.M.; Salsbury, T.I. Distributed fault diagnosis of heating, ventilation, and air conditioning systems. AIChE J. 2019, 65, 640–651. [Google Scholar] [CrossRef]
- Yin, X.; Decardi-Nelson, B.; Liu, J. Distributed monitoring of the absorption column of a post-combustion CO2 capture plant. Int. J. Adapt. Control Signal Process. 2020, 34, 757–776. [Google Scholar] [CrossRef]
- Yin, X.; Liu, J. Distributed output-feedback fault detection and isolation of cascade process networks. AIChE J. 2017, 63, 4329–4342. [Google Scholar] [CrossRef]
- Wang, X.L.; Shan, X.X. Time-optimal Control Based on Bang-Bang Theory. Comput. Simul. 2006, 4, 163–166. [Google Scholar]
- Nagi, F.; Perumal, L.; Nagi, J. A new integrated fuzzy bang-bang relay control system. Mechatronics 2009, 19, 748–760. [Google Scholar] [CrossRef]
- Zhu, S.; Zou, P.; Meina, L.U.; Zhang, A.; Liu, Z.; Qiu, Z.; Hong, J. Temperature Control System Design of Infrared Detector Based on Bang-Bang and PID Control. Infrared Technol. 2020, 34, 990–995. [Google Scholar]
- Dong, S.; Yang, L.; Kang, C.; Huang, D.; Na, X.U. Fixed wing UAV attitude control and simulation. J. Northeast. Agric. Univ. 2015, 87–92. [Google Scholar]
- Astrov, I.; Rustern, E. Fuzzy Logic in Simulation of Lockheed L1011 Aircraft Three-rate Model. Ifac Proc. Vol. 2001, 34, 516–521. [Google Scholar] [CrossRef]
- Gagne, J.; Murrieta, A.; Botez, R.M.; Labour, D. New method for aircraft fuel saving using Flight Management System and its validation on the L-1011 aircraft. In Proceedings of the Aviation Technology, Integration, & Operations Conference, Los Angeles, CA, USA, 12–14 August 2013. [Google Scholar]
- Sickles, W.L.; Rist, M.J.; Morgret, C.H.; Keeling, S.L.; Parthasarathy, K.N. Separation analysis of the Pegasus XL from an L-1011 aircraft. In Proceedings of the Fourteenth International Conference on Numerical Methods in Fluid Dynamics, Bangalore, India, 11–15 July 1995. [Google Scholar]
- Chen, J.; Lin, J. Fault tolerant control of fixed wing uav based on adaptive method. J. Phys. Conf. Ser. 2021, 1846, 012024. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miao, Q.; Wei, J.; Wang, J.; Chen, Y. Fault Diagnosis Algorithm Based on Adjustable Nonlinear PI State Observer and Its Application in UAV Fault Diagnosis. Algorithms 2021, 14, 119. https://doi.org/10.3390/a14040119
Miao Q, Wei J, Wang J, Chen Y. Fault Diagnosis Algorithm Based on Adjustable Nonlinear PI State Observer and Its Application in UAV Fault Diagnosis. Algorithms. 2021; 14(4):119. https://doi.org/10.3390/a14040119
Chicago/Turabian StyleMiao, Qing, Juhui Wei, Jiongqi Wang, and Yuyun Chen. 2021. "Fault Diagnosis Algorithm Based on Adjustable Nonlinear PI State Observer and Its Application in UAV Fault Diagnosis" Algorithms 14, no. 4: 119. https://doi.org/10.3390/a14040119
APA StyleMiao, Q., Wei, J., Wang, J., & Chen, Y. (2021). Fault Diagnosis Algorithm Based on Adjustable Nonlinear PI State Observer and Its Application in UAV Fault Diagnosis. Algorithms, 14(4), 119. https://doi.org/10.3390/a14040119