1. Introduction
According to statistics, the average annual energy consumption of the information and communications industry accounts for 3% of the global total energy consumption, and carbon emissions exceed 2% of the global total [
1,
2]. Collaborative relay technology and energy harvesting technology have emerged to meet the quality of communication while reducing energy consumption. In the post-5G era, because wireless networks are becoming more and more complex, how to design appropriate energy allocation strategies to improve system performance is a problem that needs further research [
3].
Collaborative relay technology based on the energy harvesting (EH) model has been studied. In [
4], the throughput maximization problem was solved via a successive convex approximation approach, in which the relay harvests energy in the natural environment. In [
5], the authors analyzed the difference between an EH relay and a normal collaborative relay. The authors in [
6] presented a power allocation algorithm in which the relay could switch between amplify and forward (AF) and decoding and forwarding (DF) modes to obtain the optimal transmit power and operational mode of the relay in order to maximize the energy efficiency (EE). The power allocation problem for a two-hop two-way single-relay system to maximize the EE was studied in [
7]. Both source nodes and relay nodes use EH technology, and it was the aim of the authors to maximize the system capacity in [
8]. The authors of [
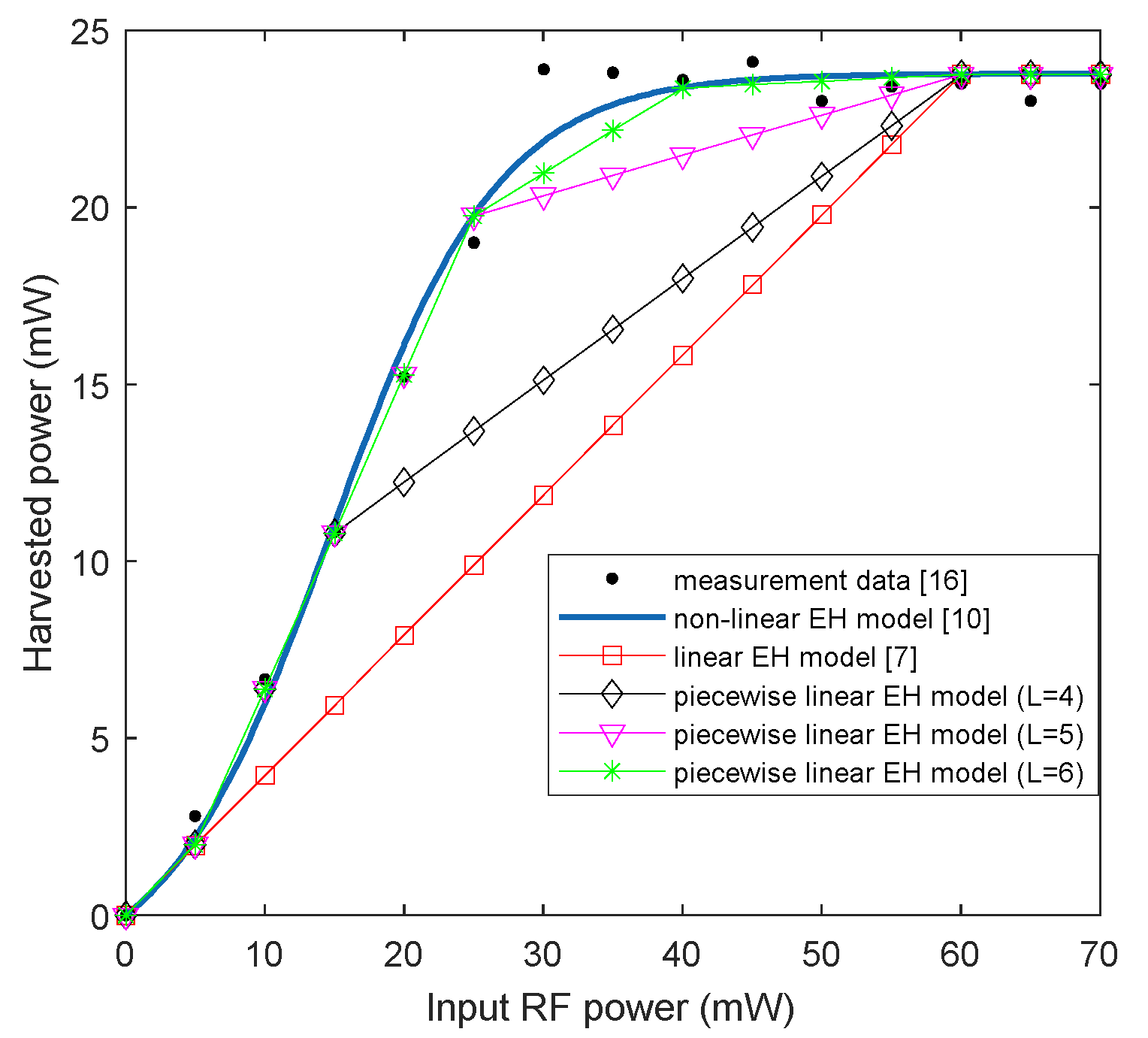
9] mainly analyzed and compared the advantages and disadvantages of the two schemes of simultaneous wireless information and power transmission (SWIPT). However, the above EH model assumes a linear EH model, in which the power conversion efficiency from the radio frequency (RF) to the direct current (DC) is a fixed constant. In fact, because the diodes, inductors and capacitors in the actual energy harvester [
10] are nonlinear, the power conversion efficiency from the RF to the DC will vary with the input power of the energy harvester circuit.
There are also preliminary studies on the application of nonlinear EH models in relay systems. In [
11], a power allocation algorithm for a nonlinear EH model that maximized the total harvesting power of the energy harvester was presented. The problem of maximizing the EE of a two-way DF single-relay network was studied in [
12]. The simulation results in [
13] show that the power allocation based on the nonlinear EH model has higher throughput than that based on the existing linear model. In [
14], the authors investigated the interrupt performance of nonlinear EH relay networks with a PS scheme. However, the above works only studied power allocation for single-relay systems and not for multi-relay systems.
This paper presents a power allocation algorithm based on the nonlinear EH model for maximizing the EE in a two-hop multi-relay cooperative forwarding system. For clarity, we have listed the contributions as follows:
In this paper, a piecewise linear EH model is used to approximate the nonlinear EH model. Based on that, the EE maximization problem with quality of service (QoS) guaranteed is a complex, nondeterministic polynomial (NP) problem and can be decoupled into a single-relay power allocation problem. It is optimized based on the Dinkelbach iteration algorithm, and the optimization problem after iteration simplification is proven to be a convex programming problem.
Because the optimization problem is a maximum–minimum function problem, it is decomposed into two maximization problems to obtain the optimal solution by adding the corresponding constraints. For each maximization problem, simplified expressions are obtained according to the different polylines of EH models, whose closed-form solutions of the optimal relay transmit power and optimal power-splitting (PS) ratio are obtained by using mathematical methods such as monotonicity, Lagrange multipliers, the KKT condition and the Cardan formula.
The simulation results show that the piecewise linear EH model performs better than the traditional linear EH model, and the EE of the multi-relay system is better than that of the single-relay system.
The rest of this paper is organized as follows. In
Section 2, the multi-relay cooperative DF system based on nonlinear EH is described, and the optimization problem is formulated to maximize the EE. In
Section 3, the joint optimization algorithm of the relay transmit power and PS ratio is proposed. In
Section 4, the algorithm is simulated, and its performance is analyzed. Finally, this paper is summarized in
Section 5.
3. Joint Optimization Algorithm for the Relay Transmit Power and PS Ratio
The optimization problem (P1) is a multi-variable joint optimization problem and a complex NP problem. Because of the piecewise linear EH model, the optimization problem has different results for its different polyline segments.
In order to solve (P1), there are two main steps as follows. In the first step, the power allocation problem of multiple relays is decoupled into a single-relay power allocation problem by using the fixed-point iteration algorithm, which assumes that only the power of this relay is to be allocated and that the power allocation of other relays is known. For convenience, some iteration variables , and are introduced. In the second step, we assume and calculate the maximum number of segments which may belong to, expressed as . In a given number of segments , we transform this non-convex problem into a convex problem by subtraction and find a closed-form solution.
According to the Dinkelbach method [
19], the maximum EE
is achieved if and only if the following equation is satisfied:
Therefore, we convert the fractional objective function to subtraction for a given segment
, and (P1) can be rewritten as
However, (P2) is still a non-convex problem. In order to convert this problem into a convex one, we let
and introduce an auxiliary variable
, expressed as
The optimization problem (P2) can be rewritten as
where
and
.
Theorem 1. The optimization problem (P3) is a convex programming problem.
Proof of Theorem 1. The objective function of (P3) regarding , and is a linear function, and constraints , , and are linear constraints, while constraints and are nonlinear constraints, so (P2) is a nonlinear programming problem. Because linear functions are both convex and concave, the objective function is convex, and constraints , , and are concave constraints. By letting and , then we have ,, where , and . Therefore, is a concave function for , and is also a concave function for ( i.e., the constraints and are concave constraints). From the definition of convex programming, the optimization problem (P3) is a convex programming problem.
□
As Equation (11) is composed of two formulas, (P3) is a maximum–minimum function problem and can be decomposed into two maximization problems to obtain the optimal solution by adding the corresponding constraints, for generality, we assume that all noise variances are equal (i.e., ).
1. If
(i.e.,
), we have
. The optimization problem can be expressed as
2. If
(i.e.,
), we have
. The optimization problem can be expressed as
Due to the uncertainty of , according to the EH model in Equation (3), (P4) and (P5) are divided into three cases: Case 1, ; Case 2, ; and Case 3, ,.
3.1. Case 1
When (i.e., ), we have and , leading to a communication outage between and . As a result, the EE is zero.
3.2. Case 2
When (i.e., ), we have , and .
Considering the constraints of (P4) and (P5), the optimization problem can be rewritten as three simplification scenarios:
Scenario I: When
, we have
, and (P4) can be rewritten as
There is a solution to Equation (15) if and only if
is satisfied. The objective function is independent of
, so we usually let
. Due to
,
is a convex function with respect to
, and it can be solved by derivation. Let
and have
. The solution I can be expressed as
where
,
,
and
denotes
.
Scenario II: When
, we have
, and (P4) can be rewritten as
There is a solution to Equation (17) if and only if
is satisfied. The objective function is related to
, so we use the Lagrange multiplier method to convert a constrained problem to an unconstrained problem
, where
is the Lagrange multiplier. Since
and
, we use the KKT condition for the solution. Solution II can be expressed as
where
,
and
.
Scenario III: Considering the constraints of (P5), the optimization problem can be rewritten as
There is a solution to Equation (19) if and only if
is satisfied and we let
. First, because Equation (19) is a linear programming problem for
and
, the optimal solution
can be obtained according to monotonicity. Then, the binary objective function is transformed into a one-variable objective function
, which is only related to
by the substitution of
. We let
and have
. Because
can be positive or negative, we have
, and
is determined by the value of
. Solution III can be expressed as
where
,
and
.
3.3. Case 3
When (i.e., ), we have , and .
Considering the constraints of (P4) and (P5), the optimization problem can be rewritten as four simplification scenarios:
Scenario I: When
and
, (P4) can be rewritten as
There is a solution to Equation (21) if and only if
is satisfied. First, because Equation (21) is a linear programming problem for
and
,
can be obtained according to monotonicity. Then, since
,
is a convex function with respect to
, and it can be solved by derivation. Solution I can be expressed as
where
is the positive root of the quadratic equation
,
,
,
,
,
and
.
Scenario II: When
and
, (P4) can be rewritten as
There is a solution to Equation (23) if and only if
is satisfied and we let
. Solved as in Equation (21), solution II can be expressed as
where
,
and
are the same as in Scenario I:
.
Scenario III: When
and
, (P4) can be rewritten as
There is a solution to Equation (25) if and only if
is satisfied. Using the Lagrange multiplier method to convert a constrained problem to an unconstrained problem
, where
is the Lagrange multiplier, since
and
, the optimal solution can be obtained by the KKT condition as follows
where
is the real root of the univariate cubic equation
,
,
,
,
,
and
are the same as in Scenario I and
is the same as in Scenario II.
In order to solve this univariate cubic equation, we use Girolamo Cardan’s formula. We let and change it into a standard univariate cubic equation , where and . The discriminant is and can be divided into three cases: when , there is a real root ; when , there are two real roots and and when , there are three real roots , and , where , and .
Scenario IV: Considering the constraints of (P5), the optimization problem can be rewritten as
There is a solution to Equation (27) if and only if
is satisfied and we let
. Solved as in Equation (19), solution IV can be expressed as
where
,
and
,
and
are the same as in Scenario III.
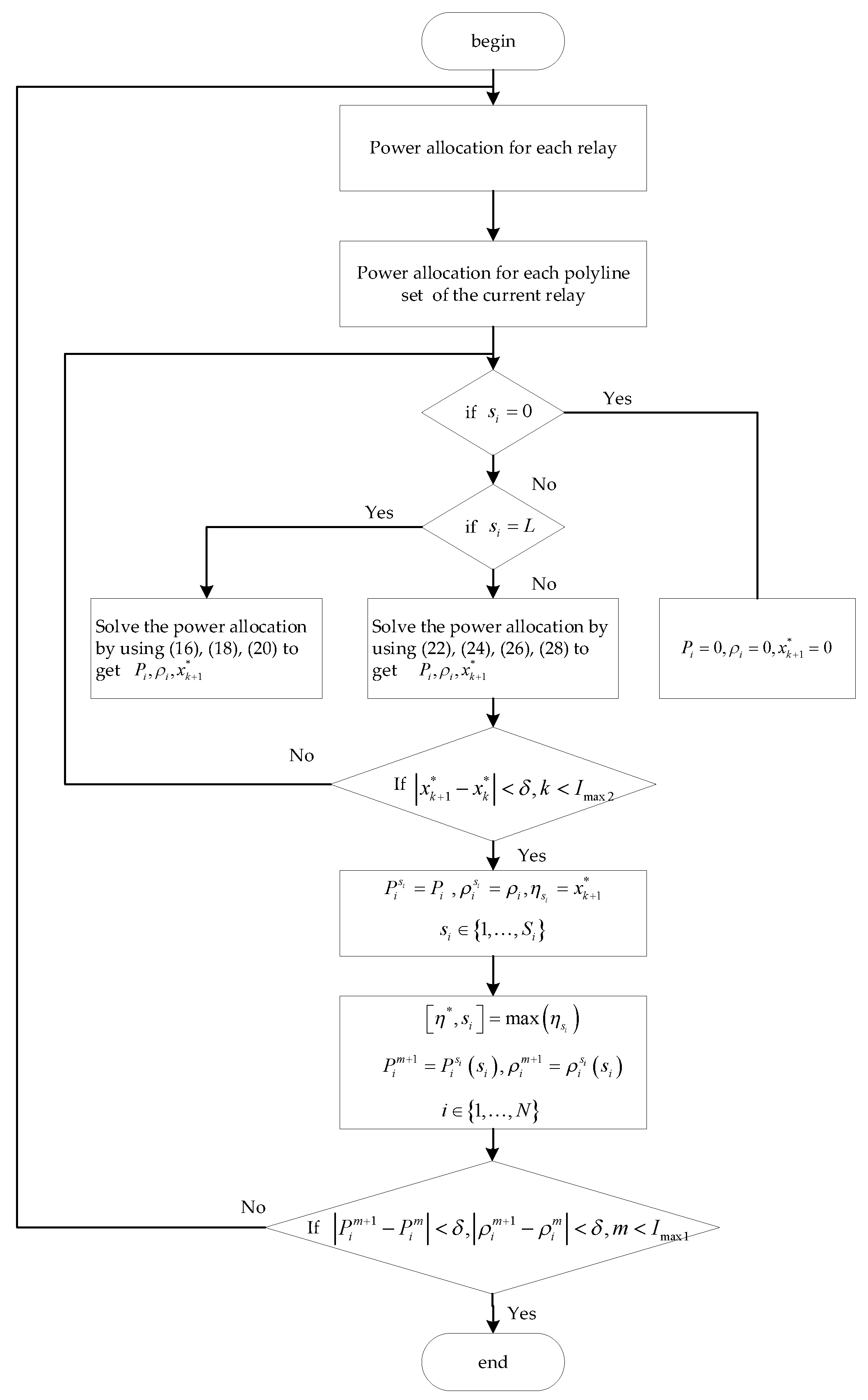
The power allocation algorithm in this paper consists of an outer loop algorithm and an inner loop algorithm. Since only single-relay power is assumed to be allocated and other relay power allocations are known in the solution, a fixed-point iteration algorithm is needed to obtain joint power optimization for all relays (i.e., an outer loop algorithm based on a fixed-point iteration, given by Algorithm 1). In the single-relay power allocation, given the initial optimal EE
and the segment
of the EH model, the Dinkelbach iteration algorithm is used to obtain the optimal relay transmit power, the optimal PS ratio and the optimal EE of
(i.e., the inner loop algorithm based on the Dinkelbach iteration, given by Algorithm 2). The workflow of this power allocation algorithm is shown in
Figure 3.
| Algorithm 1. Outer loop algorithm based on a fixed-point iteration. |
| 1: Initialize the maximum iterationsand the maximum error toleranceδ. Set the iteration indexm = 0, the optimal relay transmission power and the optimal PS ratio . |
| 2: repeat |
| 3: For fixed and , solve (P3) by Algorithm 2 to get , and |
| 4: if and then |
| 5: Convergence = true |
| 6: return , |
| 7: else |
| 8: m = m + 1 and Convergence = false |
| 9: end if |
| 10: until Convergence = true or |
| Algorithm2. Inner loop algorithm based on the Dinkelbach iteration. |
| 1:We set and Calculate maximum number of segments Si. |
| 2:for . |
| 3: Initialize the maximum iterations , the maximum error tolerance δ and the optimal energy efficiency . Set iteration index k = 0. |
| 4: repeat |
| 5: , , |
| 6: if si = L then |
| 7: Solve the power allocation by using (16), (18), (20) to get Pi, ρi. |
| 8: else |
| 9: Solve the power allocation by using (22), (24), (26), (28) to get Pi, ρi. |
| 10: end if |
| 11: Update . |
| 12: if then |
| 13: Convergence = true |
| 14: return , , |
| 15: else |
| 16: k = k + 1 and Convergence = false |
| 17: end if |
| 18: until Convergence = true or |
| 19:end for |
| 20: |
| 21:return , , |
In the inner loop algorithm, in the worst case, the Dinkelbach iteration is , and it needs to be performed times. The outer loop algorithm contains the inner loop algorithm, where the fixed-point iteration is in the worst case. Therefore, the complexity is .
4. Simulations
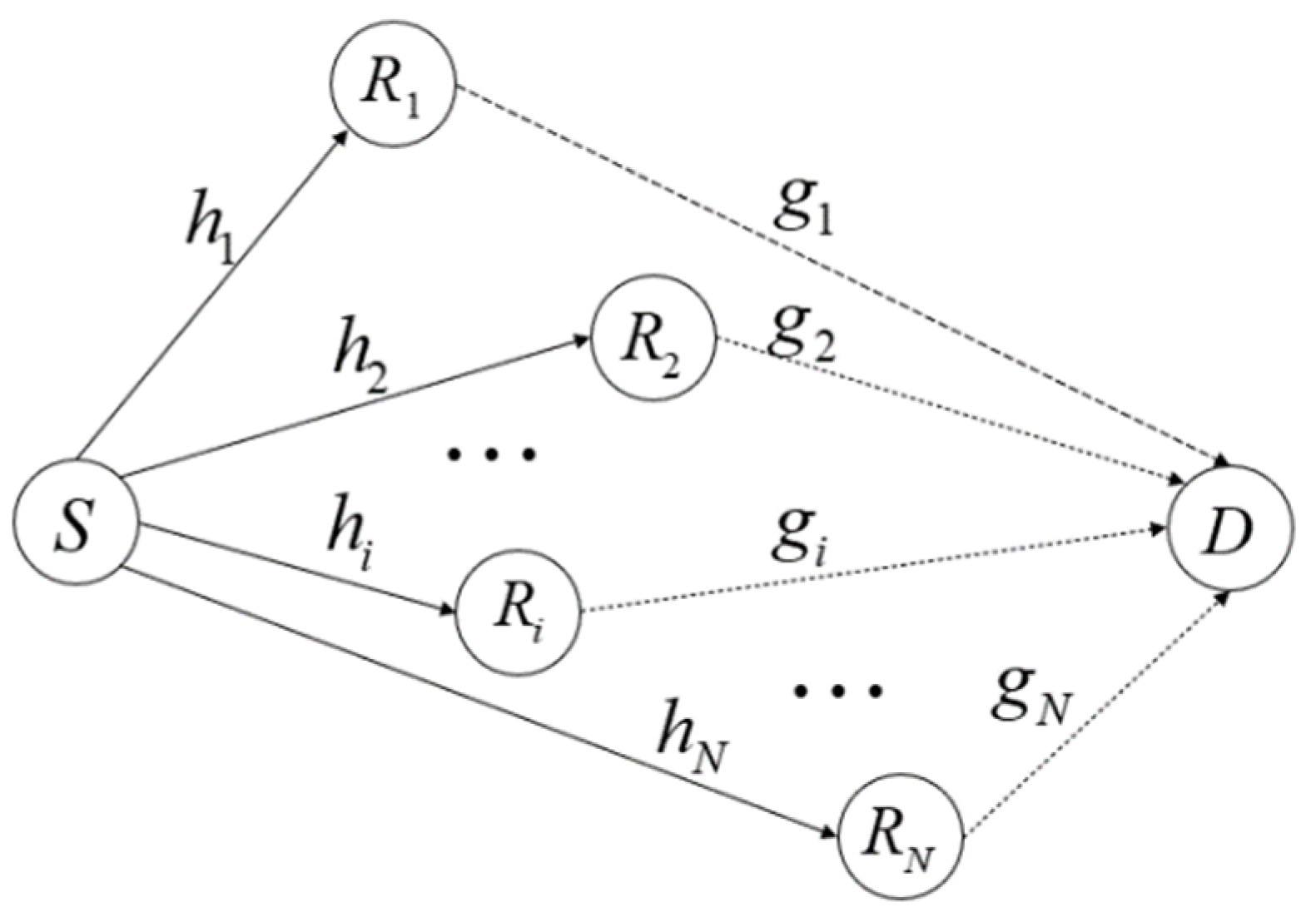
In this section, the simulation results will be analyzed, and the effectiveness of the proposed algorithm will be proven. The simulation scenario is shown in
Figure 1, where the distance between
and
is
and the relay is randomly distributed in the circle with the midpoint of
and
as the center and radius, expressed as
. Like [
12], all the channels are Rayleigh fading channels, where the path loss exponent
is
and the small-scale fading is Rayleigh fading with a mean value of 0 and variance of 1. In accordance with [
12,
20,
21], we set the simulation parameters as follows:
,
,
,
and
. The parameters of the EH model in
Figure 2 are shown in
Table 1.
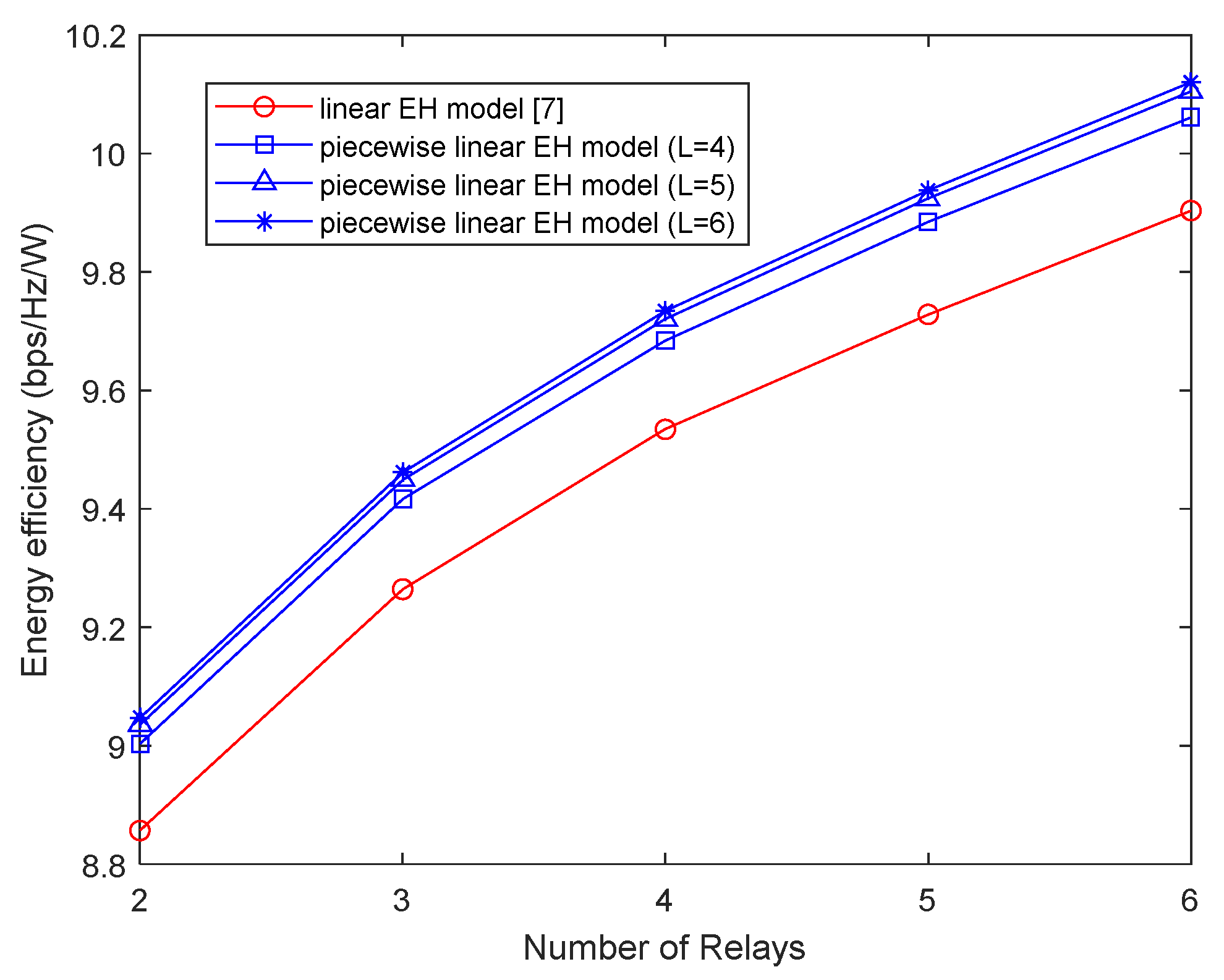
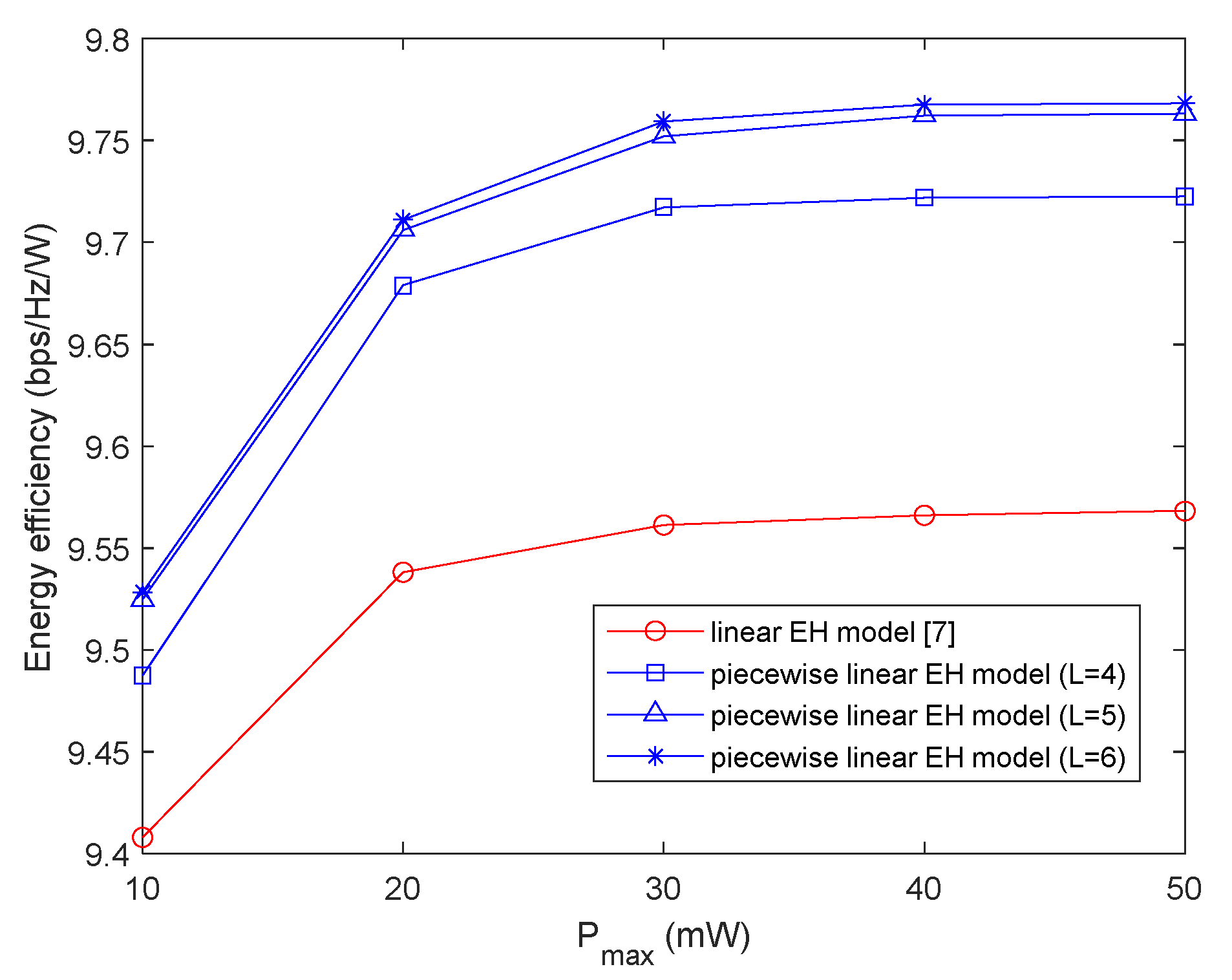
Figure 4 shows the variation of the EE in different EH models under the same relay total transmit power threshold. It can be seen that the EE increased as the number of relays increased. This is because, compared with a single relay, multiple relays can improve the information transmission rate. Since the relay uses the harvested energy for DF without consuming fixed energy, the increase in the number of relays can also improve the EE of the system. In addition, it can also be observed that the performance of the piecewise linear EH model was better than that of the linear EH model in [
7]. This is because the piecewise linear EH model improves the accuracy of the traditional linear EH one. The more segments, the better the performance, but its growth rate will decrease with the increase in the segment number. Therefore, the piecewise linear EH model with
was selected for simulation analysis in this paper.
Figure 5 shows that the EE changed with the total transmit power threshold of relays
, and the number of relays was
. It can be seen that the EE increased with the increase of
, and the increase gradually decreased until it no longer increased. This was because the energy harvested by the EH model was limited. When
exceeds the total power that can be used after EH, the EE will not increase with the increase of
. In this simulation scenario, when
, the EE would not change significantly with the increase in
.
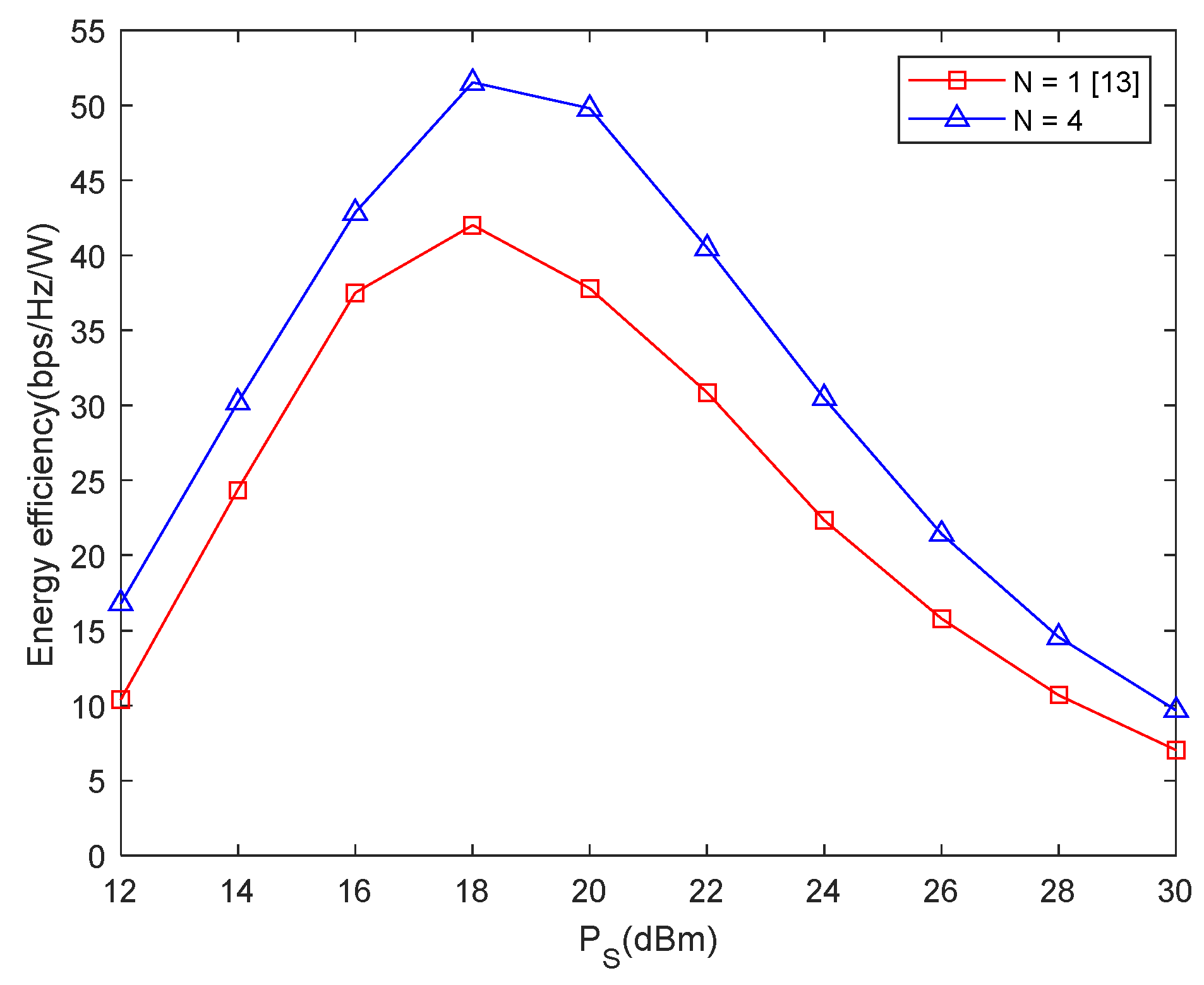
Figure 6 shows that the EE varied with the different transmit powers of source
. It can be seen that the EE first increased with the increase of
and then decreased with the increase of
. This is because when
is very small, the energy harvested by the relay may not be enough to complete the information transmission, which makes the EE relatively low. With the increase of
, the relay can harvest more sufficient energy to complete the information transmission, so the EE correspondingly increases. However, when
exceeds a certain value, the energy consumption is too high, and the EE will decrease with the increase of
. In this simulation scenario, when
, the EE is the highest. In addition, compared with the single-relay in [
13], multi-relay cooperation can effectively improve performance.
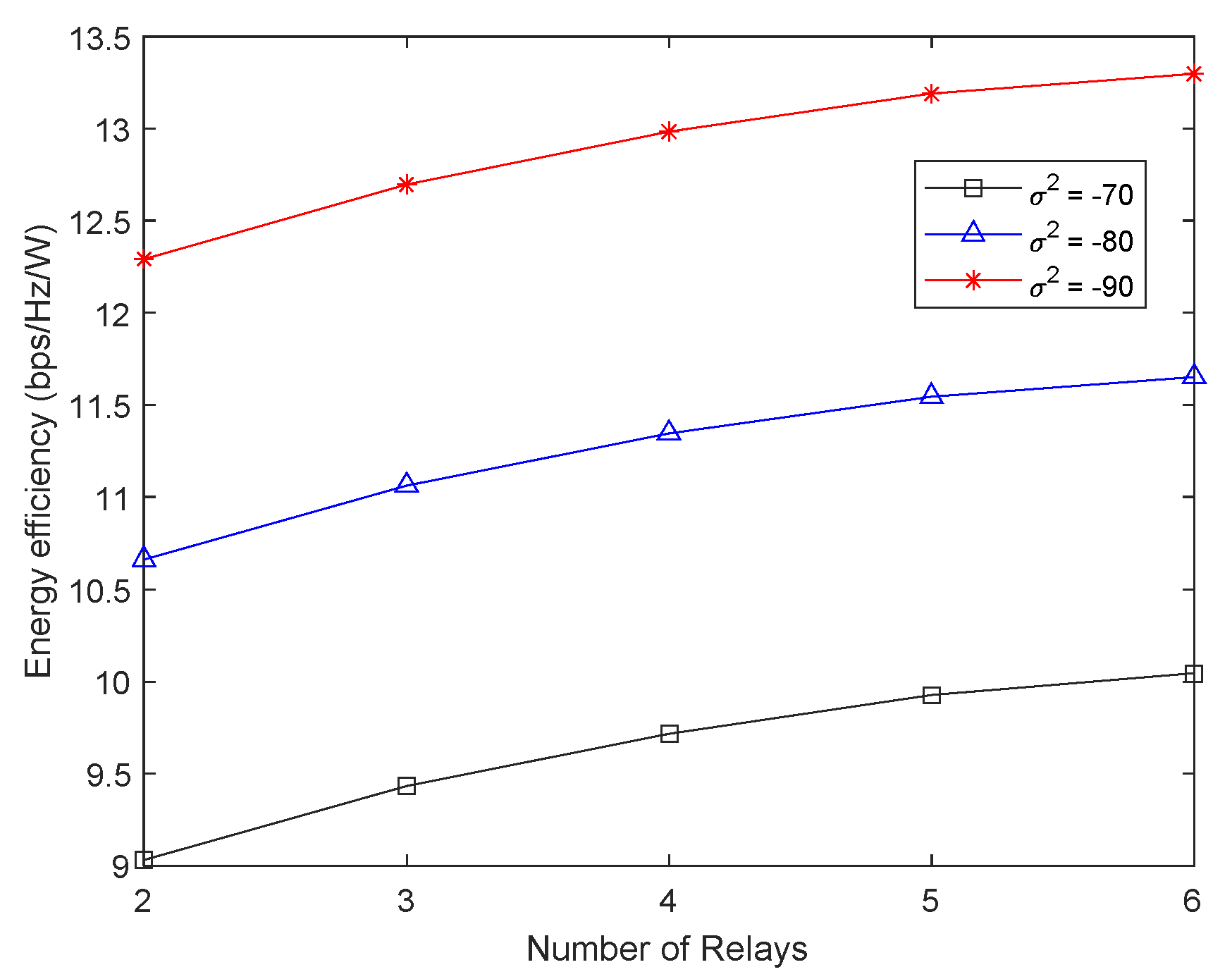
Figure 7 shows the change in EE with the noise power
. The lower the noise power, the higher the energy efficiency. This is because the reduction of noise power can effectively improve the information transmission rate.
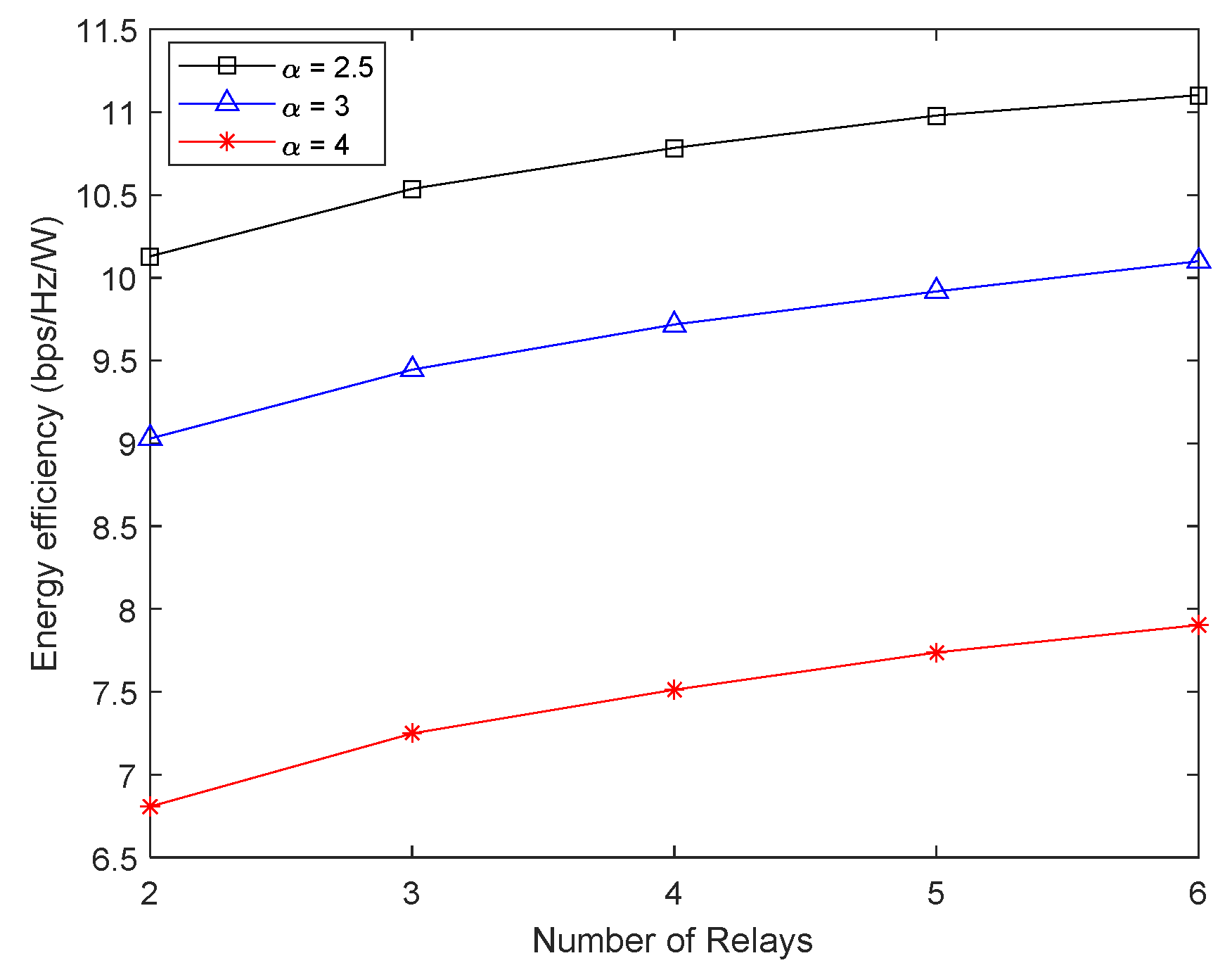
Figure 8 shows the change in EE with a different path loss exponent
. The larger the path loss exponent
, the smaller the channel gain, the smaller the information transmission rate, the smaller the harvested energy and the smaller the energy efficiency.
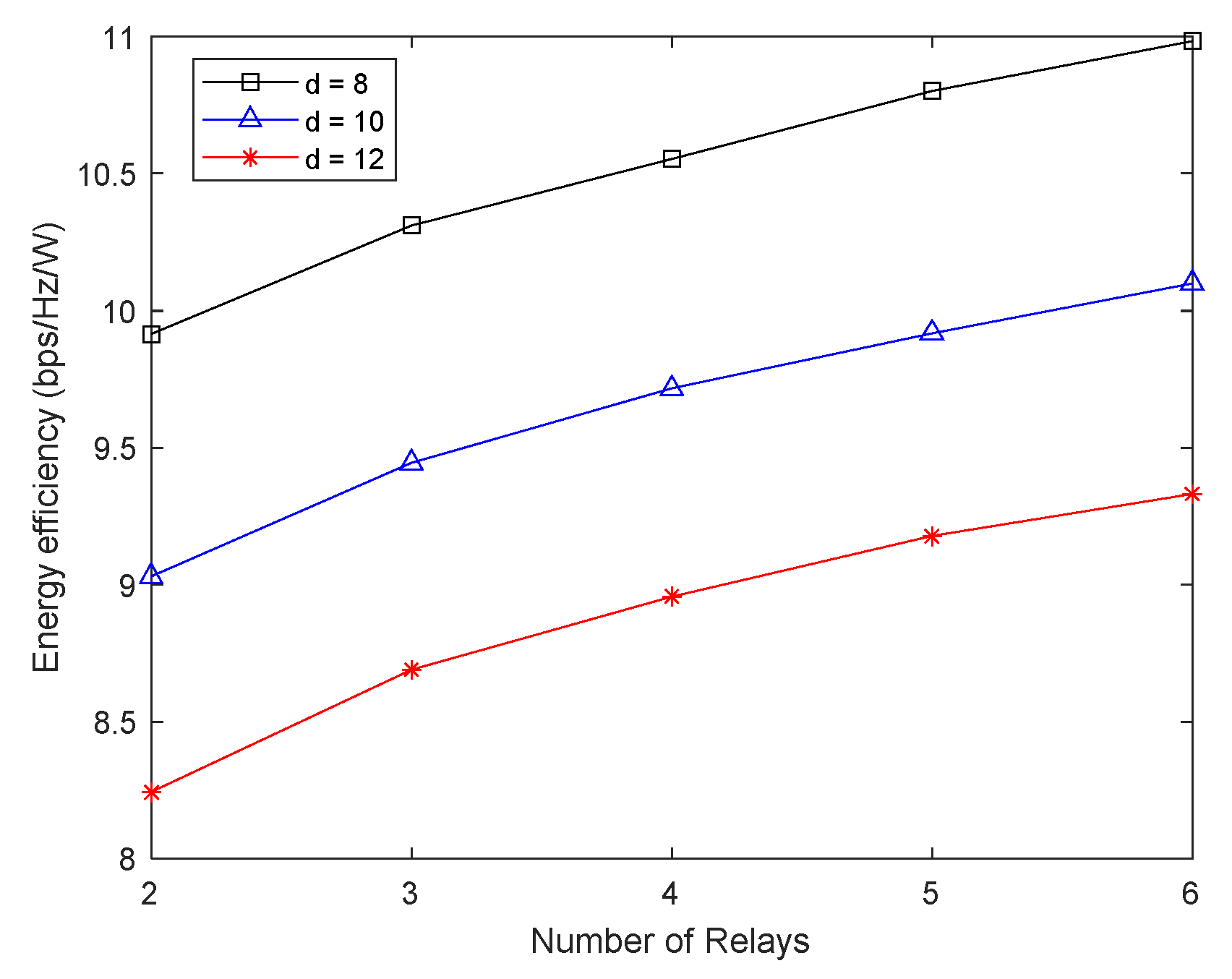
Figure 9 shows the change in EE with the distance
between
S and
D. The larger the distance
, the smaller the information transmission rate and the smaller the energy efficiency.
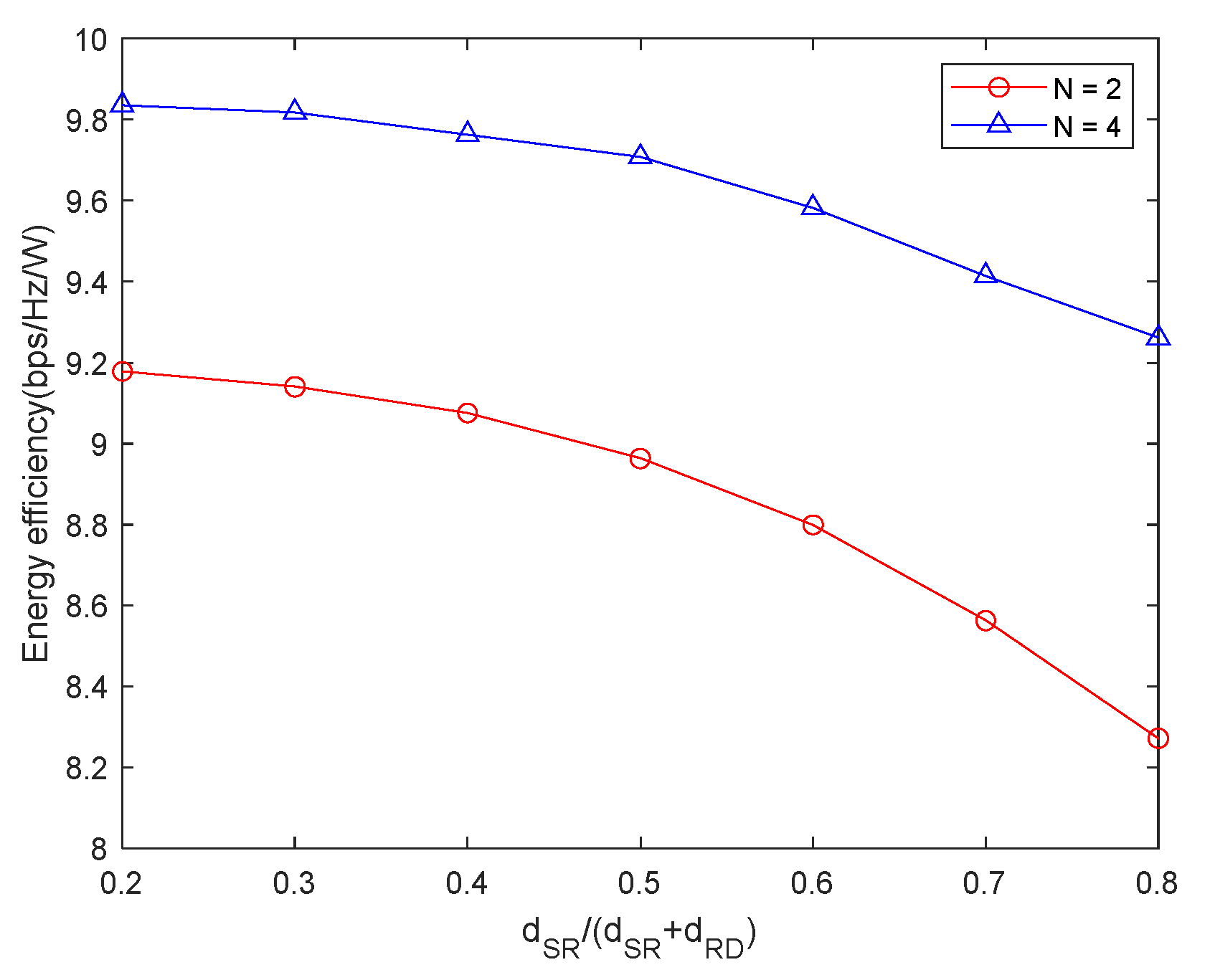
Figure 10 shows the change in EE with the position of relays. The closer the relay is to the source node, the higher the energy efficiency.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}