
Twenty-Four-Hour Ahead Probabilistic Global Horizontal Irradiance Forecasting Using Gaussian Process Regression



Abstract
:1. Introduction
1.1. Context
1.2. Literature Review
1.3. Contributions and Research Highlights
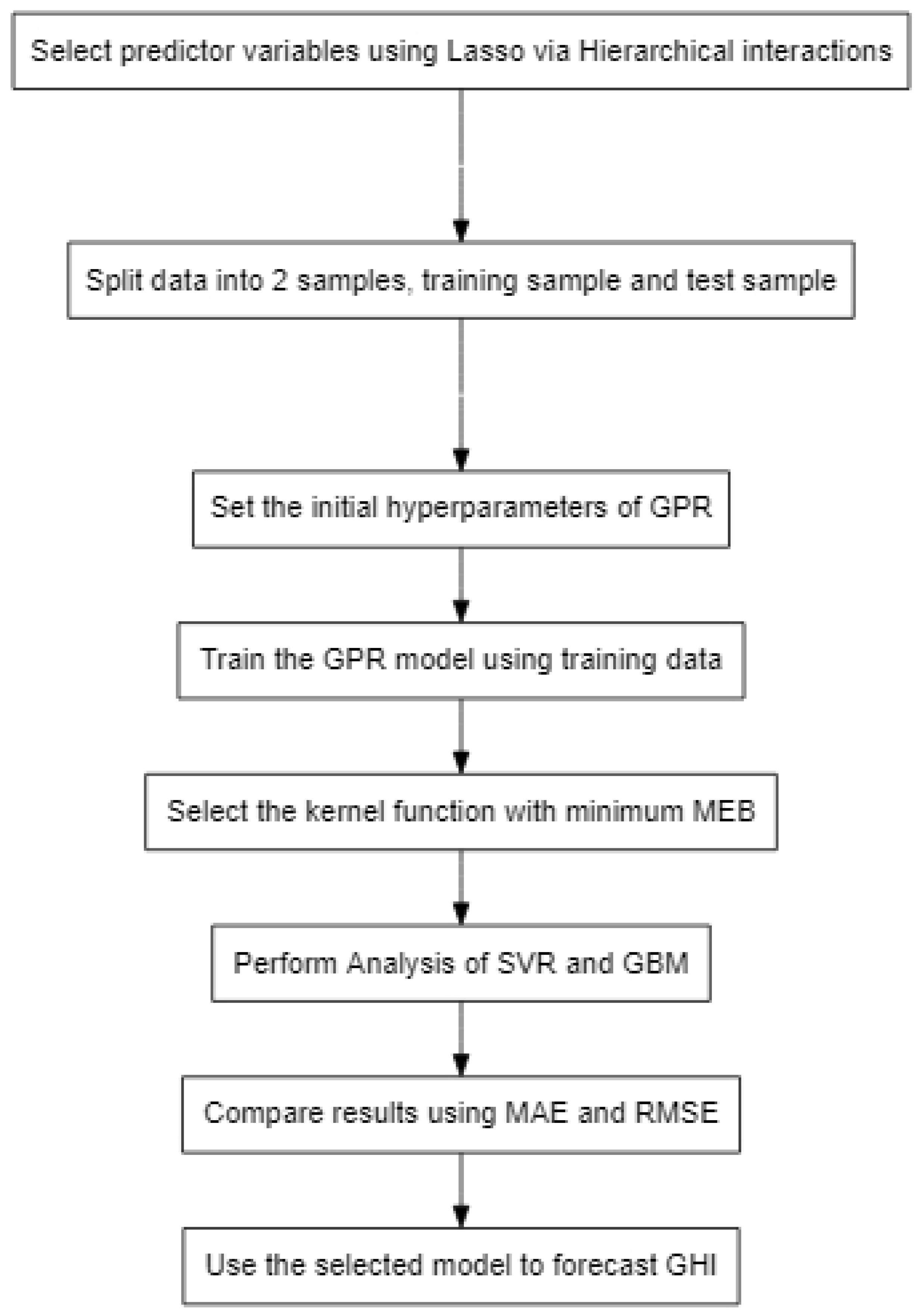
2. Methods and Materials
2.1. Gaussian Process Regression Models
2.1.1. Bayesian Inference
2.1.2. Covariance Functions
2.1.3. Radial Basis Kernel
2.1.4. Matern Kernel
2.1.5. Dot Product Kernel
2.1.6. Rational Quadratic Kernel
2.2. Core Vector Regression Models
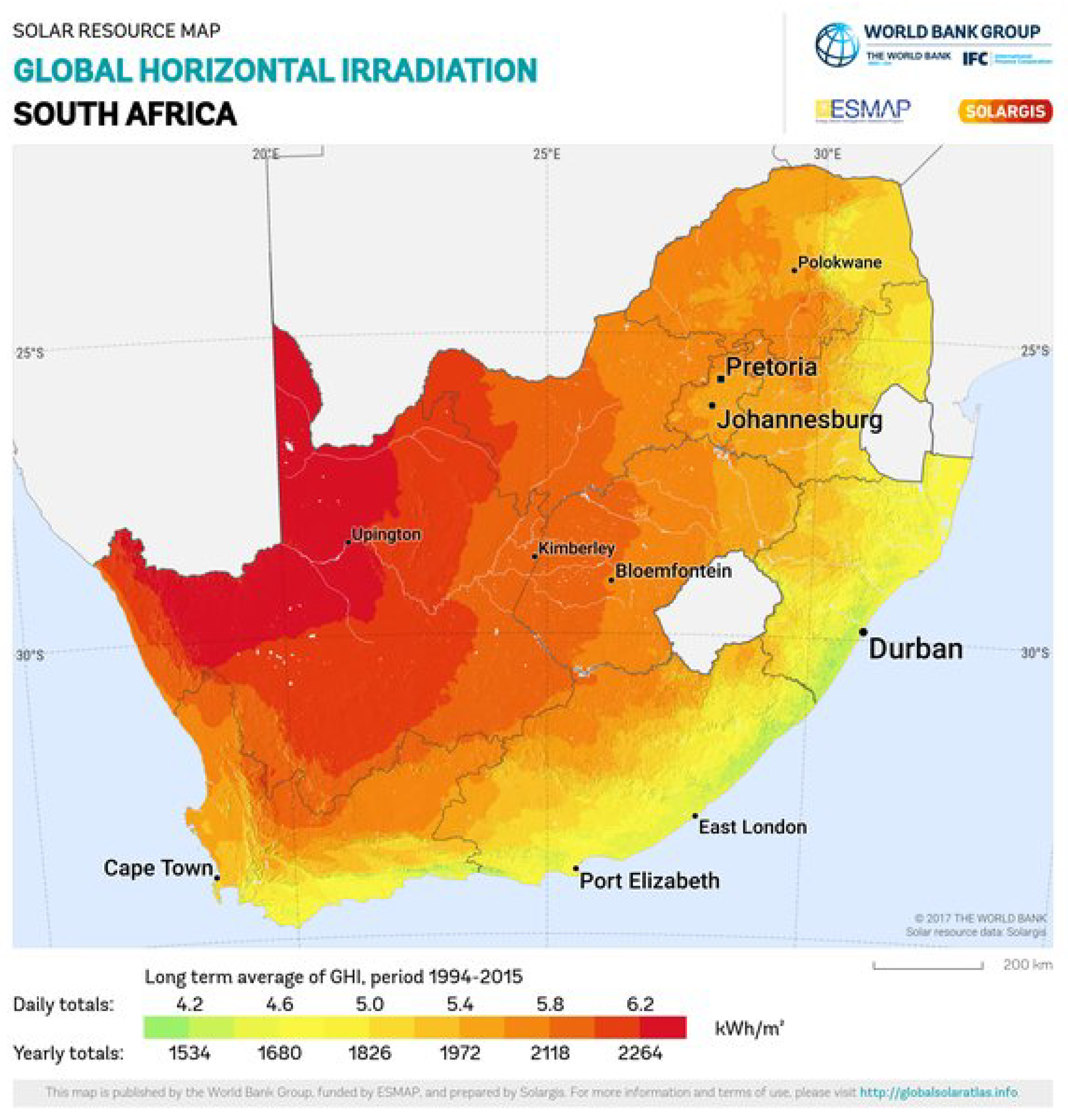
2.3. Variables, Data and Software
2.4. Variable Selection and Parameter Estimation
2.4.1. Variable Selection
2.4.2. Parameter Estimation
2.5. Benchmark Models
2.5.1. Support Vector Regression
2.5.2. Stochastic Gradient Boosting Regression
2.6. Evaluation Metrics
3. Empirical Results
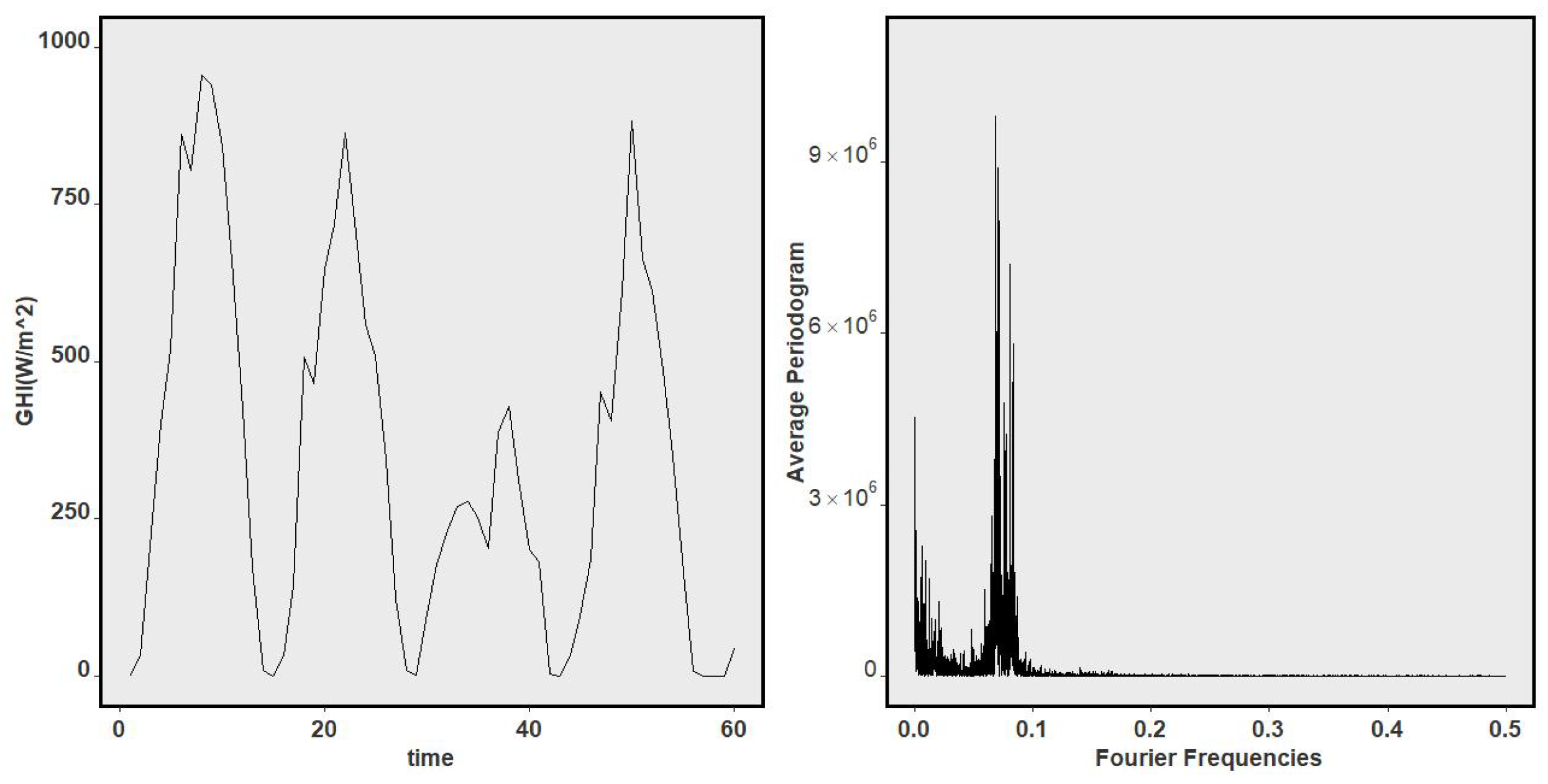
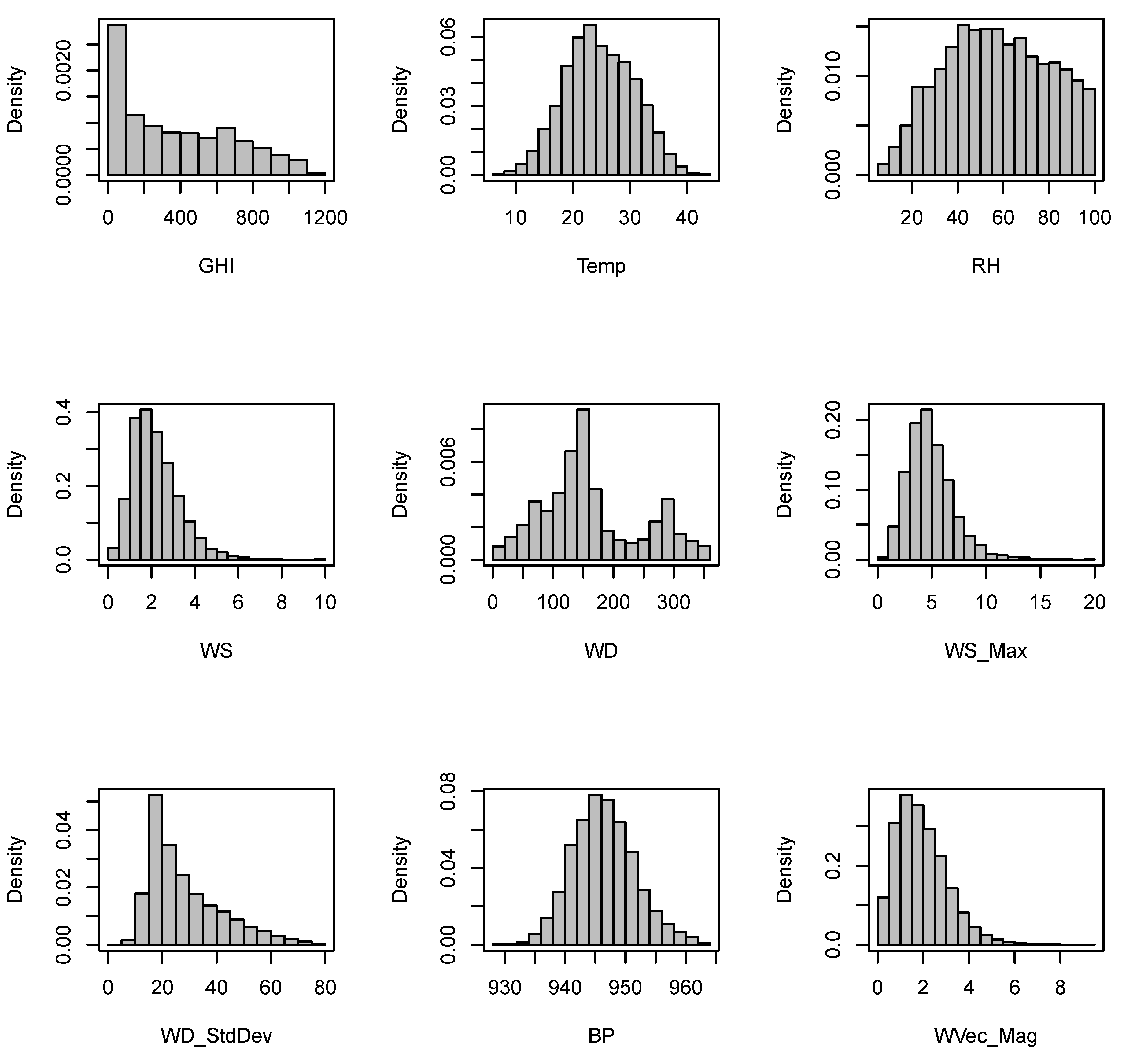
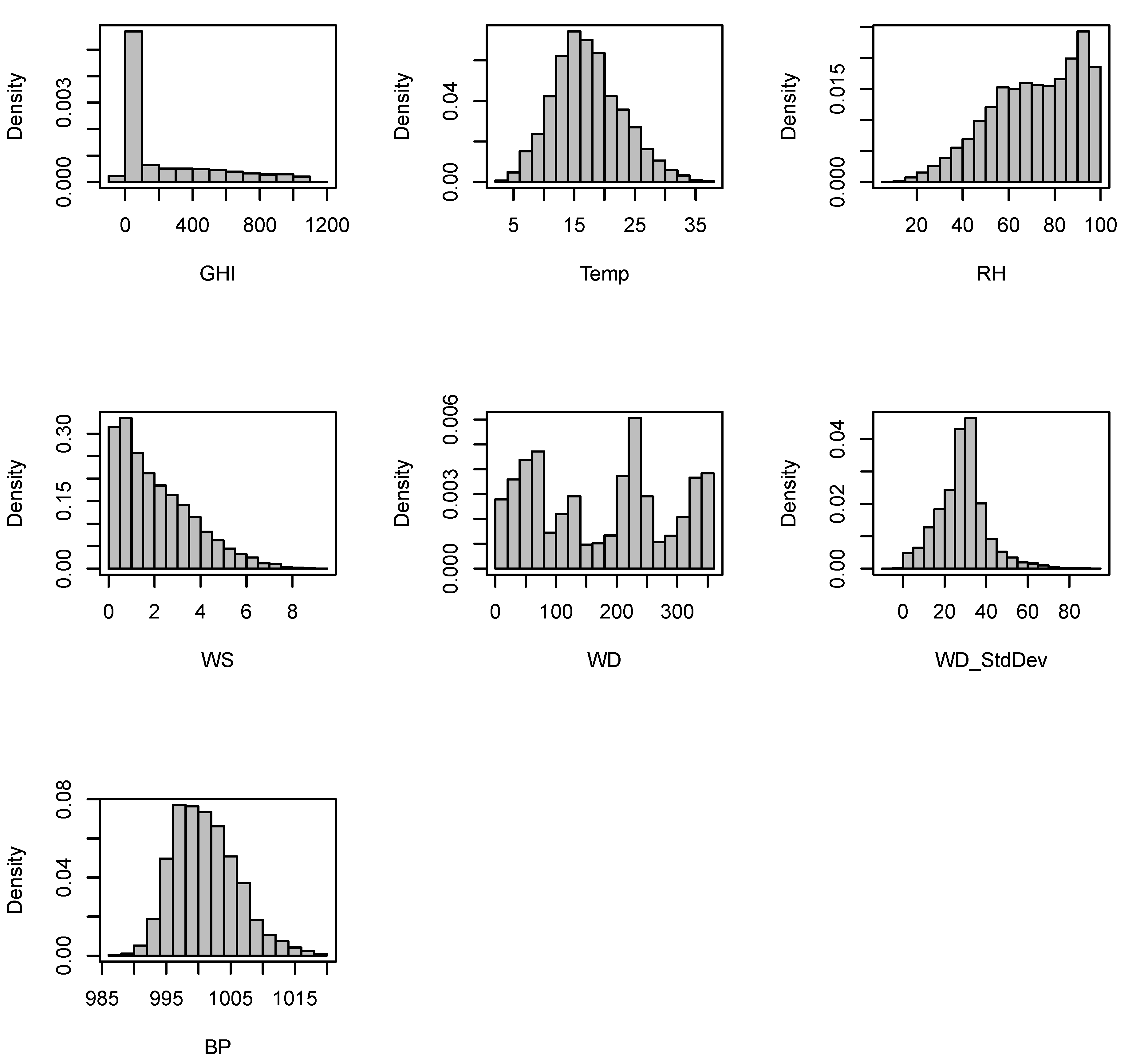
3.1. Exploratory Data Analysis
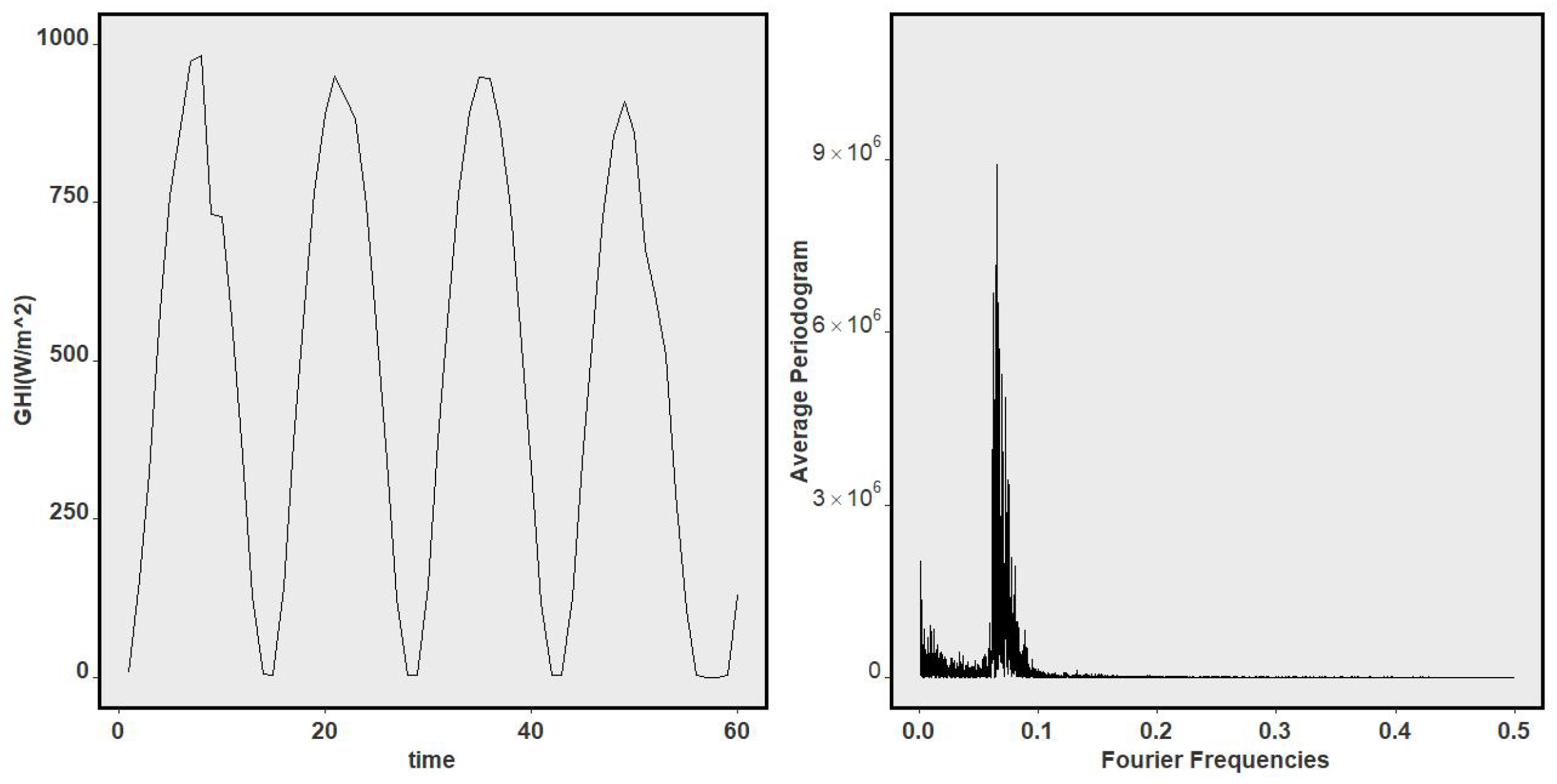
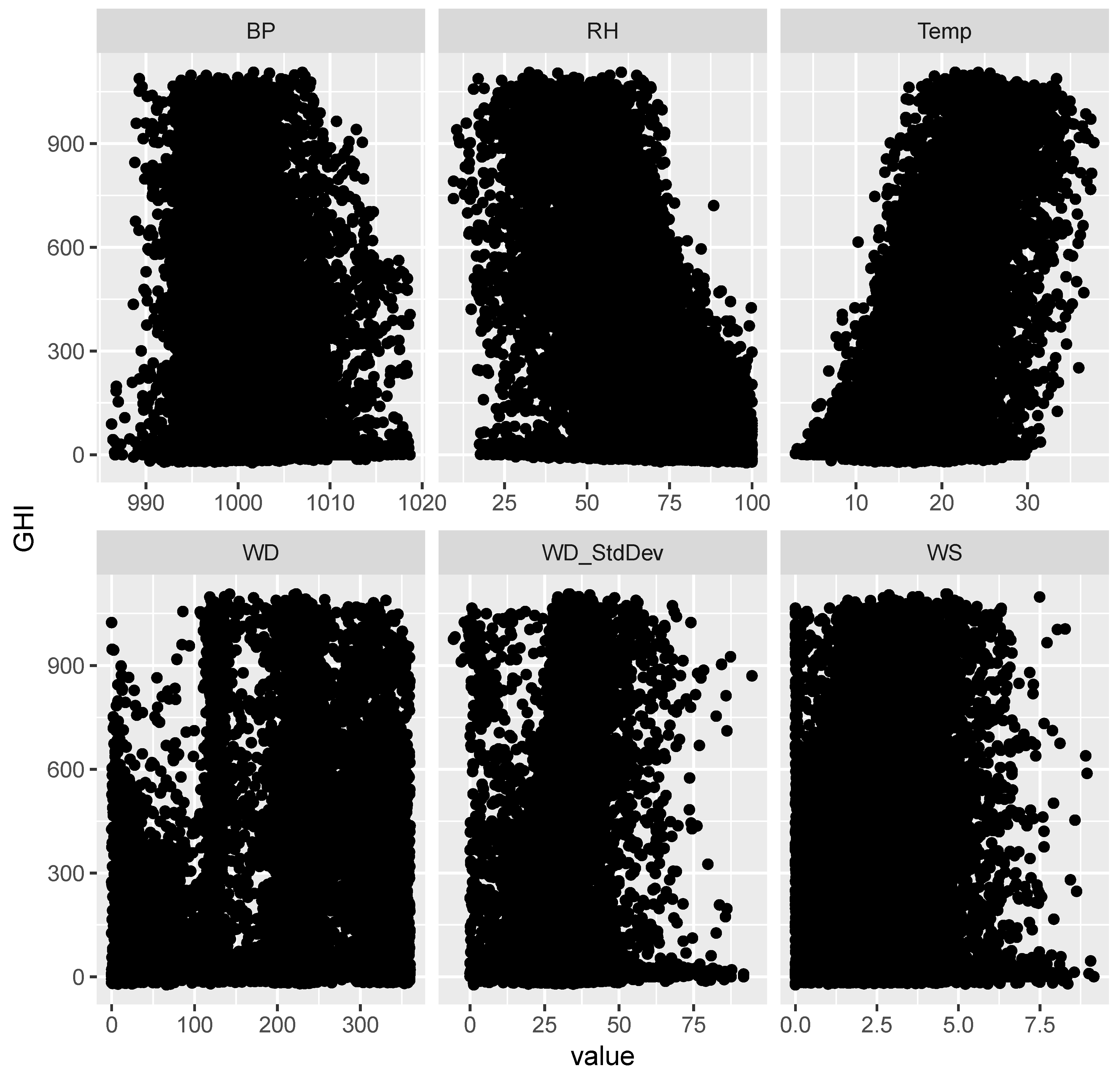
3.1.1. VEN—Real-Time Analysis
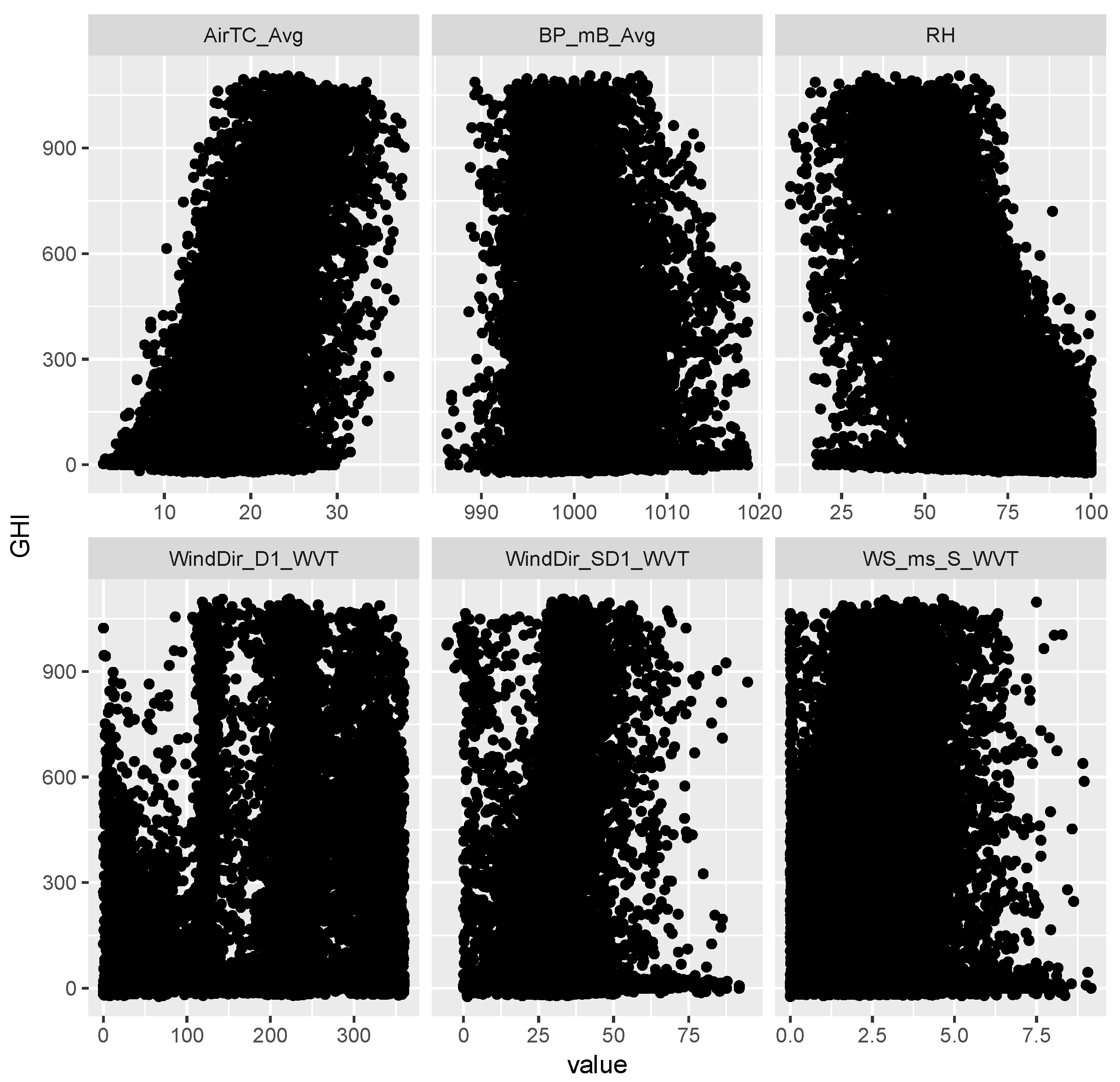
3.1.2. SUN—Real-Time Analysis
3.2. Forecasting Results
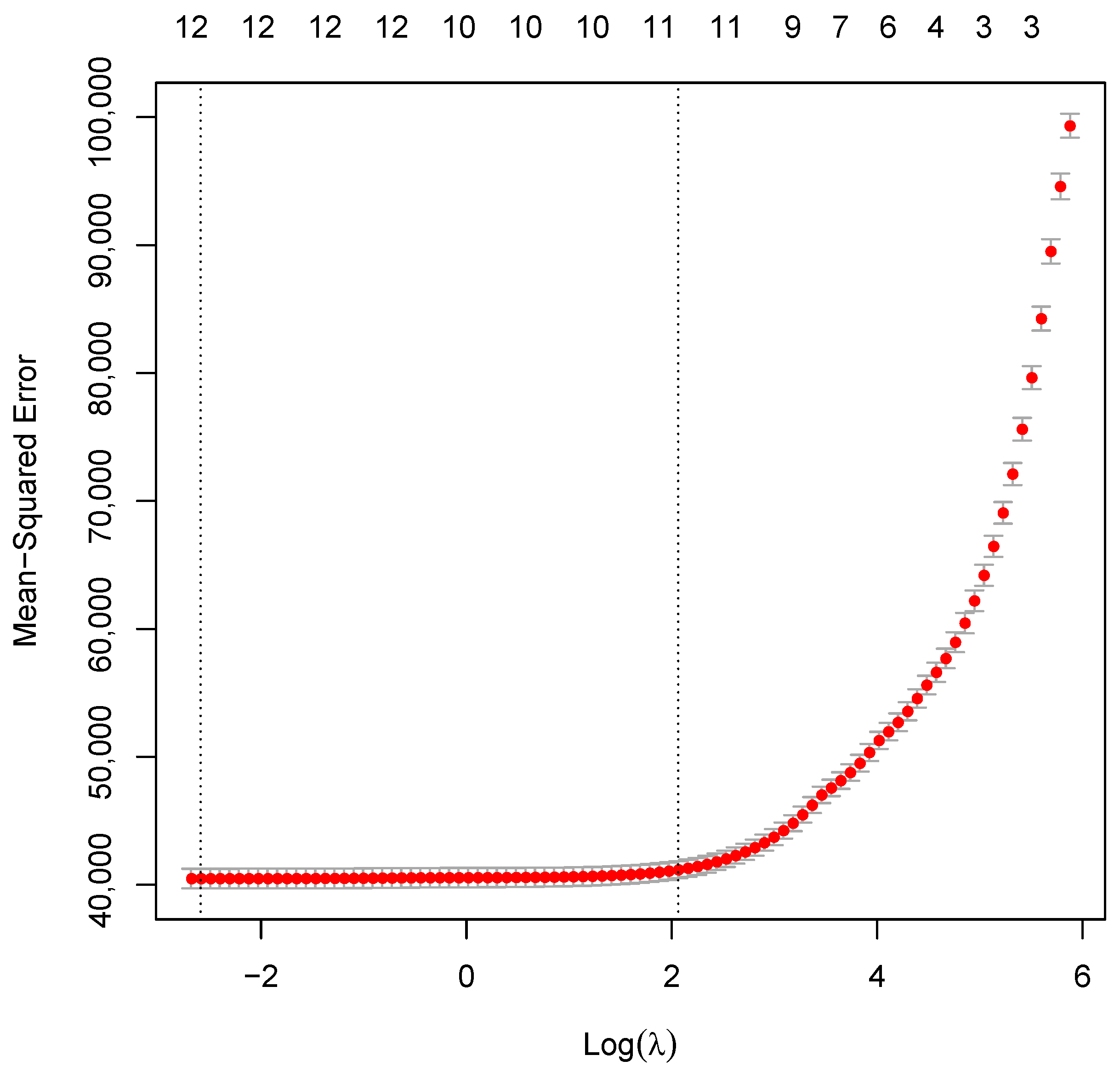
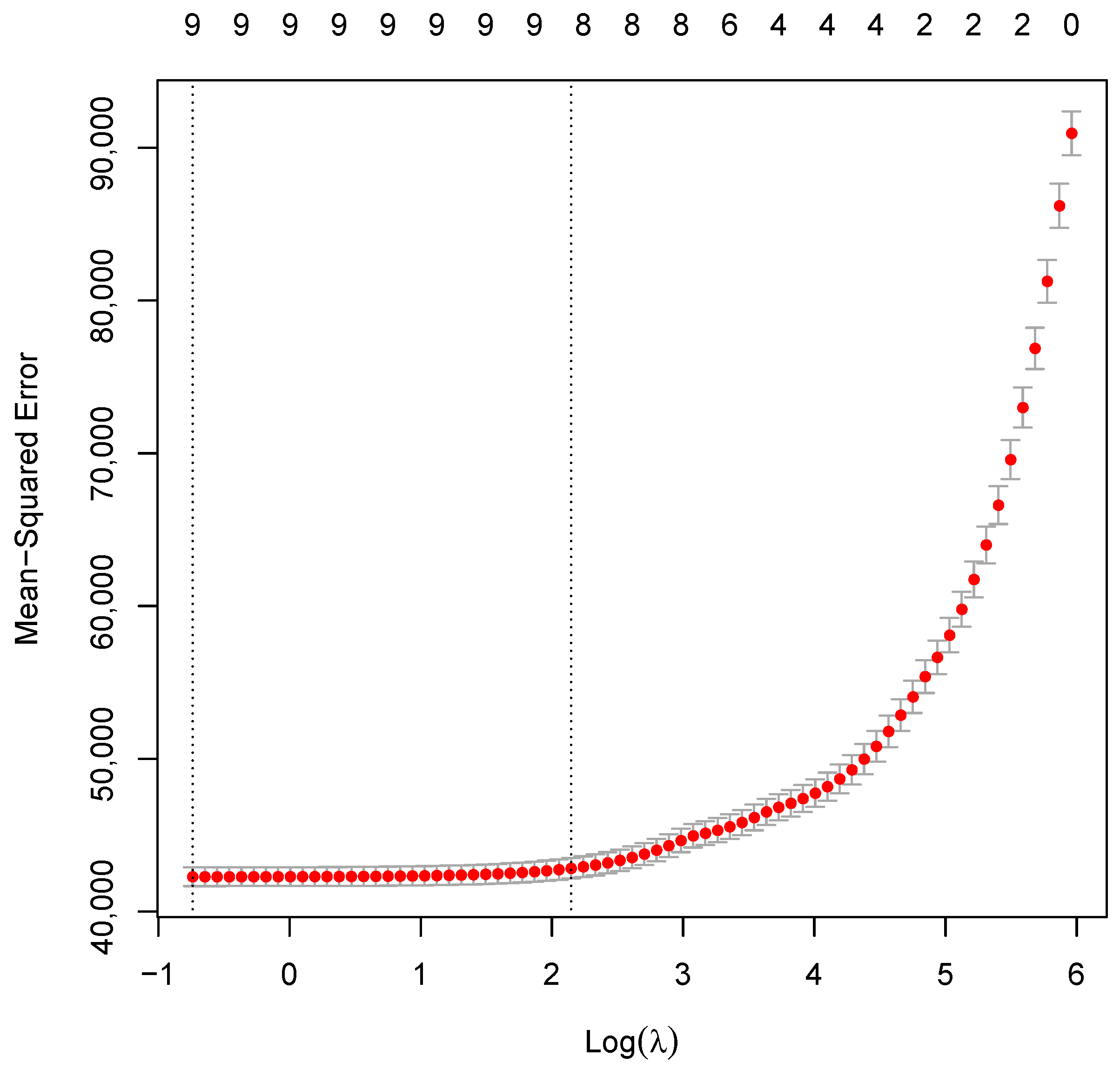
3.2.1. Variable Selection Using Lasso via Hierarchical Interactions
VEN Data
SUN Data
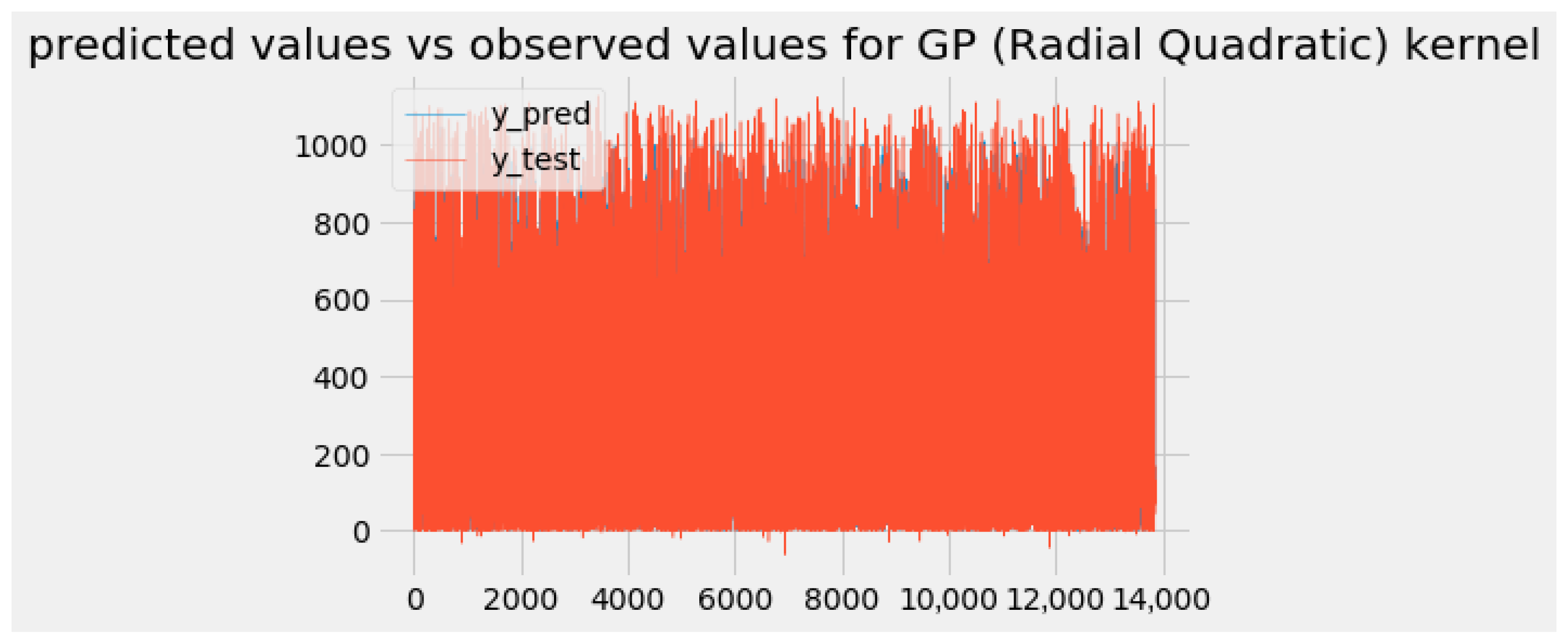
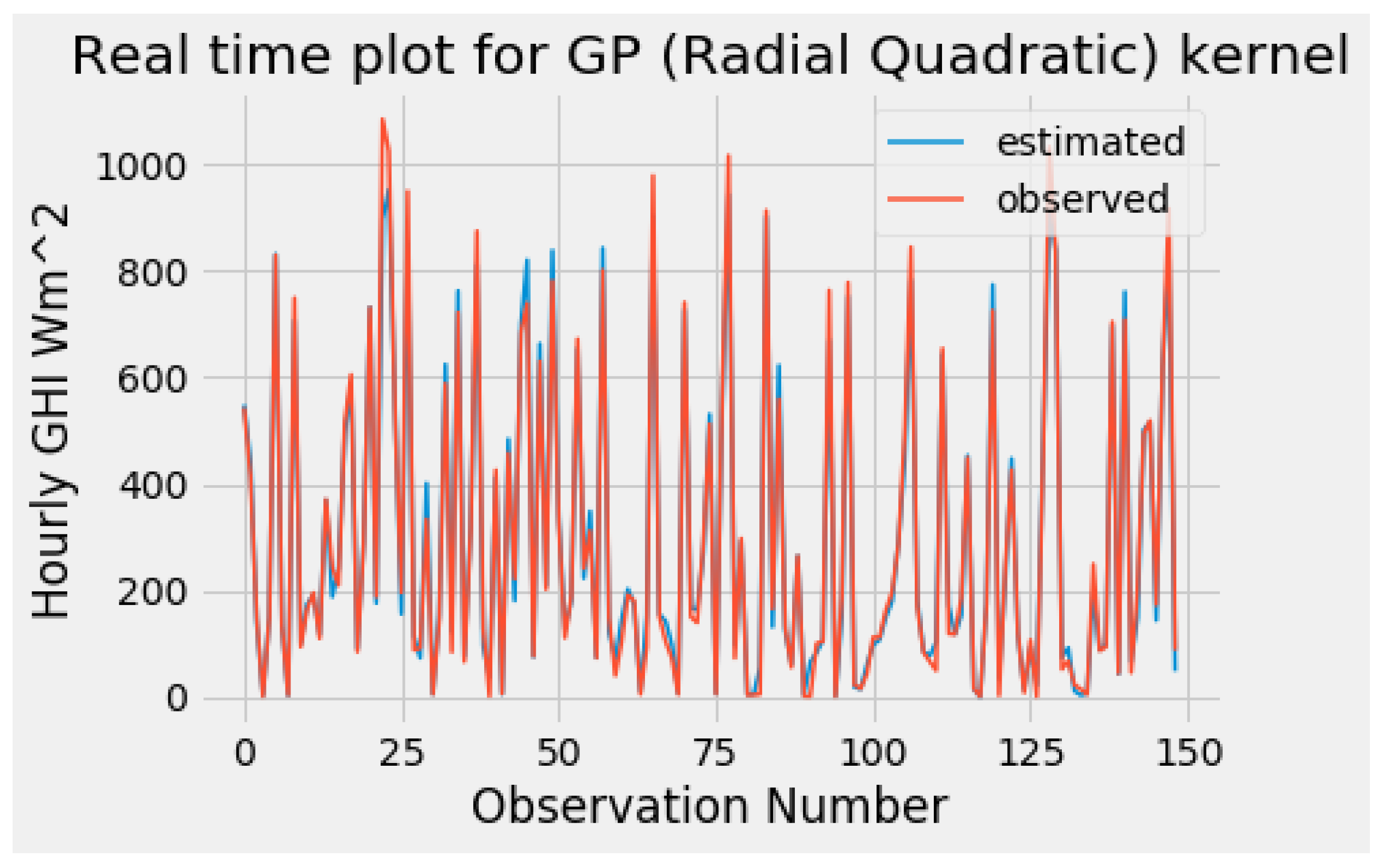
3.2.2. Gaussian Process Regression Results
VEN Data without Interactions
VEN Data with Interactions
SUN Data with No Interactions
SUN Data with Interactions
3.2.3. Benchmark Models and Evaluation of Prediction Techniques
- Main Models
- M1—gpr-VEN no interaction
- M2—gpr-VEN with interaction
- M3—gpr-SUN no interaction
- M4—gpr-SUN with interaction
- Benchmark Models
- M5—gbm-VEN no interaction
- M6—gbm-VEN with interaction
- M7—gbm-SUN no interaction
- M8—gbm-SUN with interaction
- M9—svr-VEN no interaction
- M10—svr-VEN with interaction
- M11—svr-SUN no interaction
- M12—svr-SUN with interaction
- where
- gpr—Gaussian process regression
- gbm—gradient boosting method
- svr—support vector regression
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CVR | Core Vector Regression |
| GBM | Gradient Boosting Method |
| GHI | Global Horizontal Irradiance |
| GPR | Gaussian Process Regression |
| MAE | Mean Absolute Error |
| MEB | Minimum Enclosed Ball |
| MLE | Maximum likelihood Estimation |
| RBF | Radial Basis Function |
| RMSE | Root Mean Square Error |
| SAURAN | Southern African Universities Radiometric Network |
| SGBR | Stochastic Gradient Boosting Regression |
| SVM | Support Vector Machine |
| SVR | Support Vector Regression |
References
- Jakel, F.; Scholkopf, B.; Wichmann, F.A. A Tutorial on Kernel Methods for Categorization. J. Math. Psychol. 2007, 51, 343–358. [Google Scholar] [CrossRef]
- Zhandire, E. Predicting clear-sky global horizontal irradiance at eight locations in South Africa using four models. J. Energy S. Afr. Energy Res. Cent. 2017, 28, 77–86. [Google Scholar] [CrossRef]
- Mpfumali, P.; Sigauke, C.; Bere, A.; Mulaudzi, S. Day ahead hourly global horizontal irradiance forecasting: An application to South African data. Energies 2019, 12, 3569. [Google Scholar] [CrossRef] [Green Version]
- Govender, P.; Brooks, M.J.; Matthews, A.P. Cluster analysis for classification and forecasting of solar irradiance in Durban, South Africa. J. Energy S. Afr. 2018, 29, 63–76. [Google Scholar] [CrossRef]
- Mutavhatsindi, T.; Sigauke, C.; Mbuvha, R. Forecasting Hourly Global Horizontal Solar Irradiance in South Africa Using Machine Learning Models. IEEE Access 2020, 8, 198872–198885. [Google Scholar] [CrossRef]
- Juban, R.; Ohlsson, H.; Maasoumy, M.; Poirier, L.; Kolter, J.Z. A multiple quantile regression approach to the wind, solar, and price tracks of GEFCom2014. Int. J. Forecast. 2016, 32, 1094–1102. [Google Scholar] [CrossRef]
- Bacher, P.; Madsen, H.; Nielsen, H.A. Online short-term solar power forecasting. Sol. Energy 2009, 83, 1772–1783. [Google Scholar] [CrossRef] [Green Version]
- Raza, M.Q.; Nadarajah, M.; Ekanayake, C. On recent advances in PV output power forecast. Sol. Energy 2009, 136, 125–144. [Google Scholar] [CrossRef]
- Hong, T.; Wilson, J.; Xie, J. Long term probabilistic load forecasting and normalization with hourly information. IEEE Trans. Smart Grid 2013, 5, 456–462. [Google Scholar] [CrossRef]
- Larson, D.P.; Nonnenmacher, L.; Coimbra, C.F. Day-ahead forecasting of solar power output from photovoltaic plants in the American South west. Renew. Energy 2013, 91, 11–20. [Google Scholar] [CrossRef]
- Trapero, J.R. Calculation of solar irradiation prediction intervals combining volatility and kernel density estimates. J. Energy 2016, 114, 266–274. [Google Scholar] [CrossRef] [Green Version]
- Ranganai, E.; Sigauke, C. Capturing long-range dependence and harmonic phenomena in 24-h olar irradiance forecasting: A quantile regression robustification via forecasts combination approach. IEEE Access 2020, 8, 172204–172218. [Google Scholar] [CrossRef]
- Amarasinghe, P.A.G.M.; Abeygunawardana, N.S.; Jayasekara, T.N.; Edirisinghe, E.A.J.P.; Abeygunawardane, S.K. Ensemble models for solar power forecasting: A weather classification approach. AIMS Energy 2020, 8, 252–271. [Google Scholar] [CrossRef]
- Maritz, J.; Lubbe, F.; Lagrange, L. A Practical Guide to Gaussian Process Regression for Energy Measurement and Verification within the Bayesian Framework. Energies 2018, 11, 935. [Google Scholar] [CrossRef] [Green Version]
- Dahl, A.; Bonilla, E. Scalable Gaussian Process Models for Solar Power Forecasting. In Data Analytics for Renewable Energy Integration: Informing the Generation and Distribution of Renewable Energy; Woon, W., Aung, Z., Kramer, O., Madnick, S., Eds.; Springer: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- Tolba, H.; Dkhili, N.; Nou, J.; Eynard, J.; Thil, S.; Grieu, S. GHI forecasting using Gaussian Process regression: Kernel study. IFAC Paper Online 2019, 52, 455–460. [Google Scholar] [CrossRef]
- Dahl, A.; Bonilla, E. Grouped Gaussian Processes for solar power prediction. Mach. Learn. 2019, 108, 1287–1306. [Google Scholar] [CrossRef] [Green Version]
- Tipping, M.E. Sparse Bayesian learning and the relevance vector machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Quinonero-Candela, J. Learning with Uncertainty: Gaussian Processes and Relevance Vector Machines. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, 2004. [Google Scholar]
- Martino, L.; Read, J. A joint introduction to Gaussian Processes and Relevance Vector Machines with connections to Kalman filtering and other kernel smoothers. Inf. Fusion 2021, 74, 17–38. [Google Scholar] [CrossRef]
- Bates, J.M.; Granger, C.W. The combination of forecasts. J. Oper. Res. Soc. 1969, 20, 451–468. [Google Scholar] [CrossRef]
- Gershman, S.J.; Blei, D.M. A tutorial on Bayesian nonparametric models. J. Math. Psychol. 2012, 56, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Rasmussen, C.E.; Williams, C.K. Gaussian Processes for Machine Learning; The MIT Press: Cambridge, MA, USA, 2006; Volume 38, pp. 715–719. [Google Scholar]
- Tsang, I.; Kwok, J.; Cheung, P.M. Core vector machines: Fast SVM training on very large data sets. J. Mach. Learn. Res. 2005, 6, 363–392. [Google Scholar]
- Badoiu, M.; Clarkson, K. Smaller core-sets for balls. Comput. Geom. 2008, 40, 14–22. [Google Scholar] [CrossRef] [Green Version]
- Yildirim, E.A. Two algorithms for the minimum enclosing ball problem. J. Optim. 2008, 19, 1368–1391. [Google Scholar] [CrossRef] [Green Version]
- World Bank. Global Solar Atlas 2.0, Solar Resource Data, Solargis. Available online: https://solargis.com/maps-and-gis-data/download/south-africa (accessed on 22 January 2021).
- Robert, T. Regression Shrinkage and Selection via Lasso. J. R. Stat. Soc. B 1996, 58, 265–288. [Google Scholar]
- Bien, J.; Taylor, J.; Tibshirani, R. A lasso for hierarchical interactions. Ann. Stat. 2013, 41, 1111–1141. [Google Scholar] [CrossRef] [PubMed]
- Friedman, J.H. Stochastic gradient boosting. Comput. Stat. Data Anal. 2002, 38, 367–378. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning: Data Mining, Inference, and Prediction, 2nd ed.; Springer: New York, NY, USA, 2009. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Description | Measuring Units |
|---|---|---|
| Air Temperature | Temp | °C |
| Relative Humidity | RH | % |
| Wind Speed | WS | m/s |
| Wind Speed Maximum | WS_Max | m/s |
| Barometer Pressure | BP | mbar |
| Wind Direction | WD | ° |
| Wind Direction Standard Deviation | WD_Stv | ° |
| Rain Total | Rain_Tot | mm |
| Wind Vector | WVec | m/s |
| Name | Description | Measuring Units |
|---|---|---|
| Temperature | AirTC_Avg | °C |
| Relative Humidity | RH | % |
| Wind Speed | WS_ms_S_WVT | m/s |
| Wind Direction | WindDir_D1_WVT | ° |
| Wind direction standard deviation | WindDir_SD1_WVT | ° |
| Barometric pressure | BP_mB_Avg | mbar |
| Min | Q1 | Median | Mean | Q3 | Max | Skew | Kurt | |
|---|---|---|---|---|---|---|---|---|
| GHI(VEN) | 0.0005 | 238.99 | 368.39 | 368.39 | 378.31 | 1179.16 | 1.31 | 0.84 |
| GHI(SUN) | 0.0002 | 15.73 | 28.19 | 220.58 | 387.88 | 1106.53 | 1.29 | 0.398 |
| Temp | BP | RH | WD | WD_SD | WS | |
|---|---|---|---|---|---|---|
| GHI(VEN) | 0.589 | −0.100 | −0.528 | −0.221 | 0.492 | 0.168 |
| GHI(SUN) | 0.626 | −0.104 | −0.640 | 0.251 | 0.189 | 0.242 |
| Model | RMSE | MAE | Pbias |
|---|---|---|---|
| M1 | 34.1 | 20.9 | 0.2 |
| M2 | 148.4 | 102.8 | 1.3 |
| M3 | 2.7 | 2.1 | 0.2 |
| M4 | 122.5 | 64.9 | 43.4 |
| M5 | 168.5 | 126.6 | 7.1 |
| M6 | 142.7 | 103.8 | 0.6 |
| M7 | 173.9 | 116.9 | 11.9 |
| M8 | 164.7 | 110.5 | 10.6 |
| M9 | 173.1 | 126.6 | 9.5 |
| M10 | 130.5 | 91.1 | 1.2 |
| M11 | 199.2 | 112.9 | 21.6 |
| M12 | 185.1 | 104.0 | 18.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chandiwana, E.; Sigauke, C.; Bere, A. Twenty-Four-Hour Ahead Probabilistic Global Horizontal Irradiance Forecasting Using Gaussian Process Regression. Algorithms 2021, 14, 177. https://doi.org/10.3390/a14060177
Chandiwana E, Sigauke C, Bere A. Twenty-Four-Hour Ahead Probabilistic Global Horizontal Irradiance Forecasting Using Gaussian Process Regression. Algorithms. 2021; 14(6):177. https://doi.org/10.3390/a14060177
Chicago/Turabian StyleChandiwana, Edina, Caston Sigauke, and Alphonce Bere. 2021. "Twenty-Four-Hour Ahead Probabilistic Global Horizontal Irradiance Forecasting Using Gaussian Process Regression" Algorithms 14, no. 6: 177. https://doi.org/10.3390/a14060177
APA StyleChandiwana, E., Sigauke, C., & Bere, A. (2021). Twenty-Four-Hour Ahead Probabilistic Global Horizontal Irradiance Forecasting Using Gaussian Process Regression. Algorithms, 14(6), 177. https://doi.org/10.3390/a14060177