1. Introduction
Driven by the global trade expansion and the world economy reformation, the logistics sector has grown rapidly over the past few decades [
1], triggering a tremendous increase in freight transportation (e.g., road transportation, [
2]; maritime transportation, [
3]; air freight transportation, [
4]), and enabling growth in cargo volumes handled at different types of terminals (i.e., warehouses, [
5]; rail terminals, [
2]; cross-docking facility, [
6]; marine terminals, [
4], etc.). Unfortunately, this also causes negative impacts on the environment to some extent (e.g., carbon emission [
7]), and thus, enhancing the efficiency of freight transportation and creating a more sustainable logistics system is of great importance for both enterprises and the society. Among the aforementioned terminals, warehouses are perhaps the ones most relevant to the e-commerce community. Typically, warehouses are labor-intensive that include receiving, storage, order-picking and shipping processes. Among these, the order-picking process has been identified as the most labor-intensive and costly activity for the operation of warehouses (De Koster et al. 2007, [
8]). To curb operational costs and increase throughput capacity of warehouses, more and more companies adopt new storage and order-picking technologies, especially e-commerce businesses with fast turnover of goods and strong demand fluctuations. For instance, Kiva System, also called Amazon Robotics, saves pickers a lot of running back and forth fetching items from the shelves (Mountz, 2012, [
9]). The implementation of this kind of system can be seen in Amazon.COM, Alibaba.COM and JD.COM China. This type of warehouse system is referred to as a robotic mobile fulfillment system (RMFS) (Lamballais et al., 2017, [
10]), where robots hoist movable storage pods (i.e., inventory pods) and deliver them directly to the workstations for stationary pickers to retrieve required items. Unlike the traditional order-picking system, which requires pickers travel to each storage rack, this emerging parts-to-picker system allows the picker to concentrate on picking and packing orders (Boysen et al. 2017, [
11]).
There remain numerous factors impacting the order-picking process in a warehouse, including warehouse layout, storage strategy, zoning, batching and routing method (see De Koster et al. 2007 [
8] and Yu 2009 [
12]). The warehouse layout is one of the most important components [
13], which will affect the daily operations (Dukic, G and Opetuk, T, 2012 [
14]; Roodbergen et al. 2015 [
15]). Typically, in a traditional warehouse, picking aisles must be straight and parallel to each other; cross aisles should meet picking aisles at right angles, which forces pickers to travel rectilinear distances to picking locations. However, Gue and Meller (2009) [
16] break these rules and propose two novel aisle designs for the unit-load warehouse with a single pickup and deposit point (here referred as a workstation), i.e., so-called flying-V and fishbone, which can reduce expected travel distance by about 8∼12% and more than 20%, respectively. Gue and Meller may be the first to study non-traditional warehouse design after White (1972) [
17] put forward the optimum warehouse design with radial aisles. They extended their study to facilitate multiple pickup and deposit points using a flying-V layout (Gue et al. 2012 [
18]), which can save 3∼6% of the travel distance compared with a traditional layout. Inspired by these research efforts, we think it would be very interesting to investigate the performance of new layout designs under the context of a robotic mobile fulfillment system. It is worth mentioning that another similar scenario to the aforementioned issue is container picking in port yard systems and their layout design (see [
19,
20] for more details). Typically, in such systems, containers are carried by ground trolleys, shipped to quay cranes, and finally loaded to vessels. These objects mentioned above (i.e., containers, ground trolleys, and quay cranes) can be viewed as inventory pods, robots, and workstations in RMFS, respectively. There remain several essential differences between the two, but the one of most relevance to this work is the workstation location restrictions. Specifically, the quay cranes (i.e., workstations in this work) are required to be deployed on the same side of the yard (i.e., the side close to the vessels) in the yard system due to its structural limitations, whereas such restrictions do not exist in RMFS.
As multiple workstations could be employed in medium or large warehouses, whereas according to recent survey papers ([
5,
21]) and our knowledge, the only two published literature in which the layout aspects of RMFS were mentioned is Lamballais, Roy, and De Koster, (2017) [
10] and Wu et al., (2020) [
22]. Lamballais et al. maintain that the locations of the workstations in warehouses directly affect the system throughput. Wu et al. estimate the warehouse performance under various layout configurations. Unfortunately, these analyses are based on several given workstation layouts (multiple workstations), more specifically, four fundamental layout setups in reference [
10] and seven layout scenes in reference [
22] are pre-defined respectively, and then served as input settings for their proposed model, and afterwards, the performance of these layouts are further evaluated in a simulation manner. This seems exactly a main drawback of the above research that related to our work, i.e., they do not formulate workstation layout as decision variables explicitly and further improve the performance of RMFS from a warehouse design perspective. In summary, most relevant published literature performs single workstation assumption ([
16,
23,
24,
25,
26]), or consider multiple ones but tend to treat the positions of the workstations as pre-defined information ([
10,
18,
27,
28,
29,
30,
31]). As we will verify in this paper, optimal workstations are not located symmetrically on the top and bottom edges of the warehouse, which is counter-intuitive to our experiences.
In this paper, we apply non-traditional warehouse layout design to optimize the location of multiple workstations. Specifically, the flying-V layout is adopted for a RMFS to minimize the total travel distance of all robots in the system. We are going to address the following research questions:
How to appropriately locate the workstations in traditional and flying-V layouts?
Whether there exist any patterns under the optimal layout of workstations?
Is flying-V a good substitute of traditional layout?
To answer these questions, we first develop the expression of travel distance from any pod to any single workstation, for both traditional and non-traditional layouts; then, we formulate an integer programming model to optimize the location of multiple workstations. We demonstrate the proposed model can be solved by a commercial solver (for example, CPLEX) in a very short time even for very large warehouses in the e-commerce industry. We also carry out comprehensive numerical experiments to compare the performance of different warehouse layout types (traditional and flying-V) and different warehouse configurations. Our study makes the following contributions:
To the best of our knowledge, we might be the first to investigate a non-traditional layout for a robotic mobile fulfillment system.
We propose an integer programming model to determine the optimal location of workstations.
We propose two general rules that can provide an approximately optimal workstation location solution with a less than 5% gap.
The remainder of this paper is organized as follows:
Section 2 reviews relevant literature;
Section 3 presents the expression of the travel distance from any pod to any workstation; and
Section 4 presents the workstation location model.
Section 5 reports the numerical experiments and illustrates the findings, and finally, in
Section 6, conclusions are summarized, and future research directions are identified.
4. The Workstation Location Model
Section 3 provides the expression of the shortest travel distance from an arbitrary pod dwell location to any candidate workstation. Suppose each pod has the identical possibility of being used for goods retrieval under a random storage policy; it is tractable to solve a location problem to determine the optimal positions of multiple workstations.
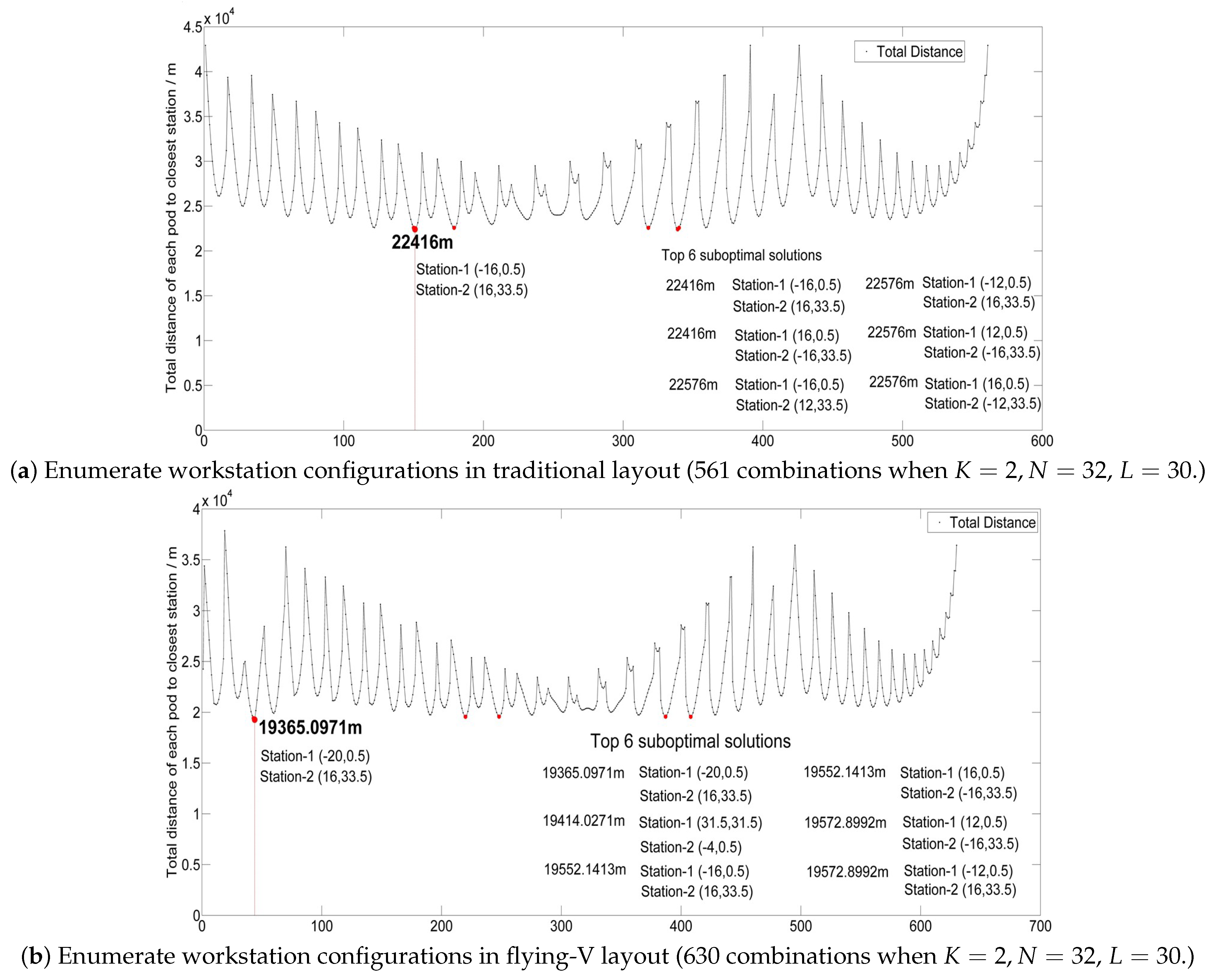
One may question whether we can enumerate all the possible workstation configurations given the knowledge that number of workstations may be not that large for a single warehouse in practice. To verify this, we set up an experiment using a warehouse with width
and length
, 960 pods or about 1500 m
.
Figure 6 shows the total distance with possible workstation combinations for both traditional layout and flying-V layout (
). It takes about one minute of CPU time to compute the the travel distances from each pod to all candidate workstations for traditional layout and four hours for the flying-V layout. If we consider using more workstations, or a larger warehouse, the computation workload will increase sharply. For example, if we select eight workstations in the same warehouse, there are
combinations for the traditional and
combinations for the flying-V layout. Therefore, the enumeration method cannot work in this case.
Based on this information, an easy-to-implement as well as efficient model should be developed to make this decision problem practical. Based on the distance expression developed above, we propose the integer programming model to minimize the total travel distance of robots. This model can determine the number and location of workstations. Please note that for the flying-V layout, we take the angle of the cross aisles as an input parameter, rather than a decision variable. The rationale behind is: (1) making it a decision variable may make the following model intractable; (2) the choices for this angle are limited owing to the discrete nature of pod locations.
Let
be the set of candidate workstations,
the set of all pod storage units (for simplicity, we call them pods), and
K the number of workstations the warehouse operators decide to construct.
and
are binary variables.
are called
location variables, representing whether the candidate point
r is chosen as a workstation in the optimal solution or not.
are called
allocation variables, indicating that whether pod
is assigned to workstation
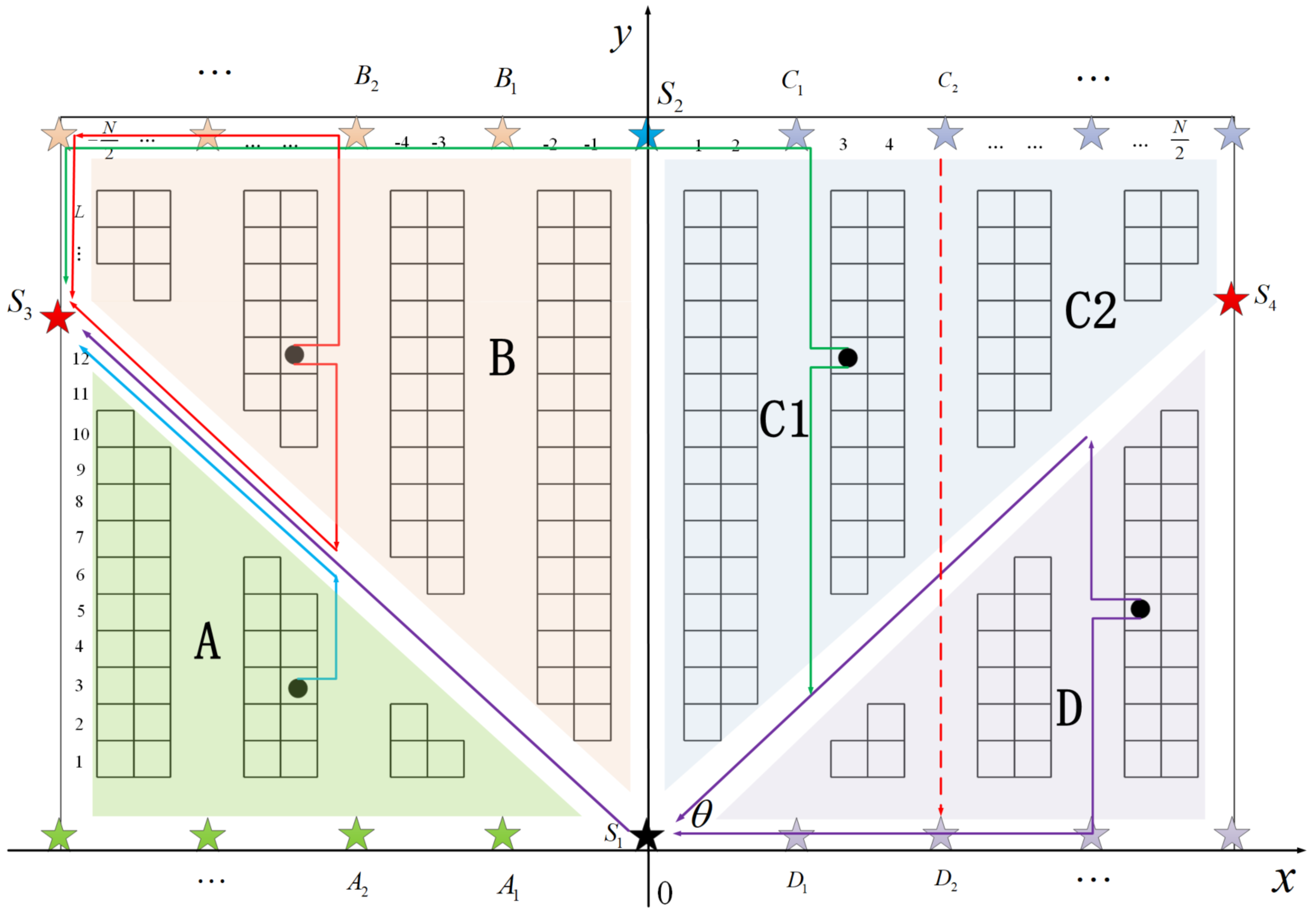
r or not. Based on the above interpretations, we redescribe the workstation location problem as a facility location problem, a typical NP-hard problem, and formulated it as an integer programming model. The proposed formulation below can be applied under both traditional and flying-V layout.
The objective function Equation (
18) aims to minimize the total travel distance from any pod to its assigned workstation along the shortest path as discussed in
Section 3. Constraints Equation (
19) restricts that exactly
K workstations are selected in optimal solution. Constraints Equation (
20) specify that each pod should be assigned to exactly one workstation. Constraints Equation (
21) guarantee that no pod will be assigned to candidate workstation
r if it is not selected in optimal solution. Constraints Equation (
22) define the variable type.
To implement the above integer programming model, we should first generate candidate workstation set
, i.e., derive the coordinates of candidate workstations according to the interpretations in
Section 3 (more specifically,
Figure 3 in
Section 3.1 for traditional layout and
Figure 5 in
Section 3.2 for flying-V layout). Then, calculate the shortest distance from each pod
to every candidate workstation, i.e., generate travel distance matrix
based on Equations (
9)–(
16). As input parameters
and
K are well prepared, the proposed optimization model can be successfully implemented and solved by optimization solvers, for example, CPLEX and Gurobi.
6. Conclusions
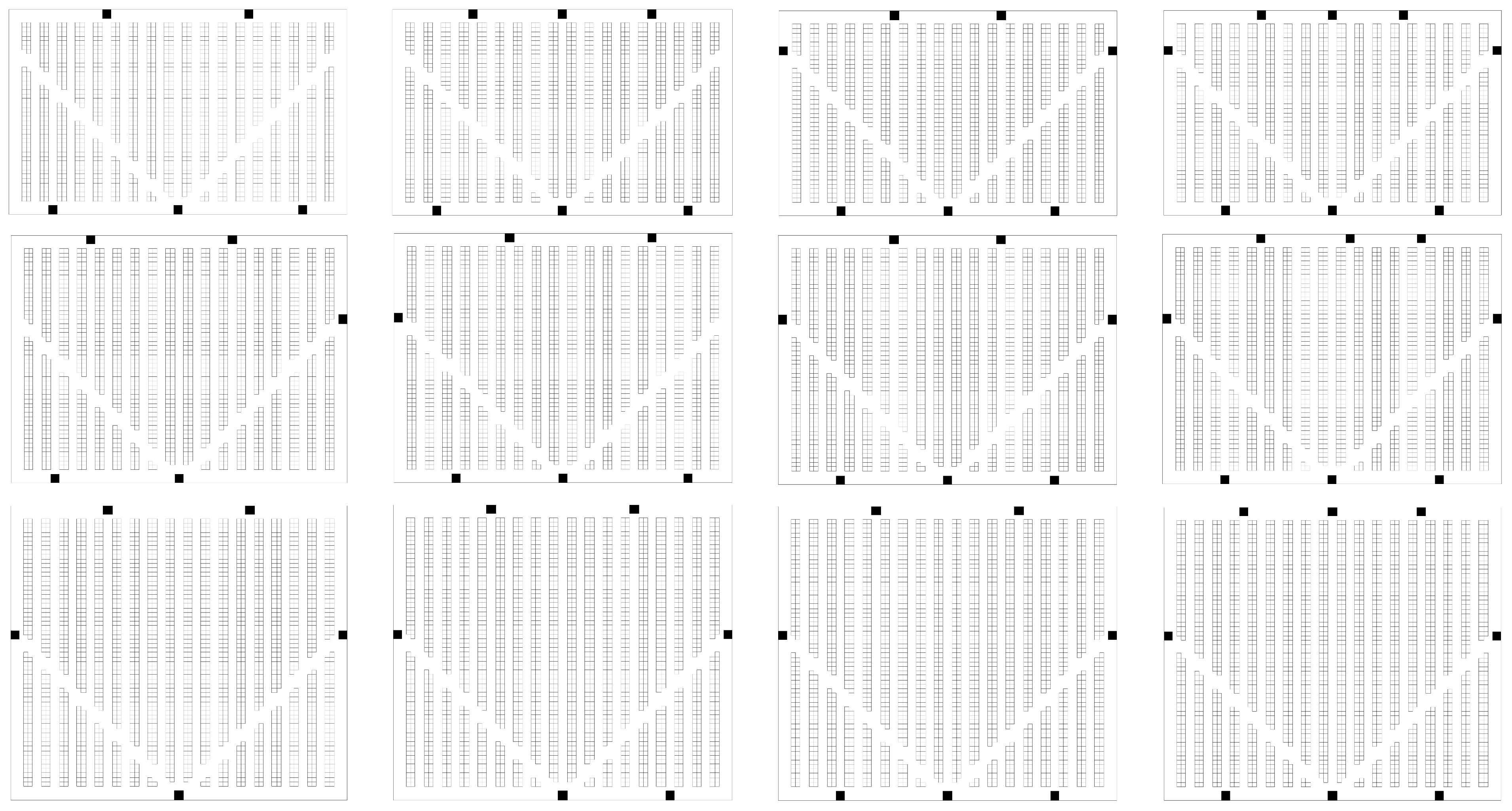
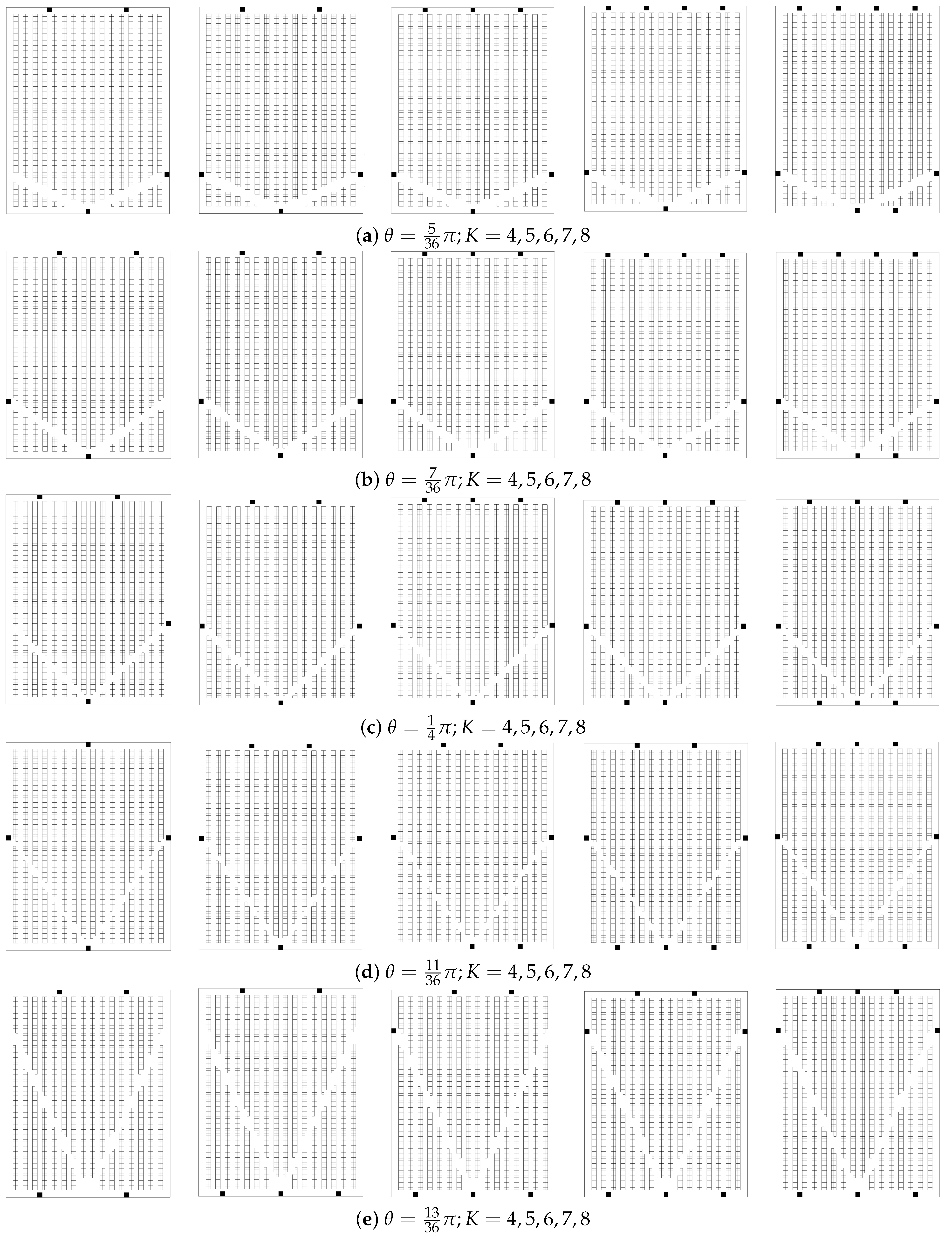
This work addresses the warehouse layout design problem in the context of a RMFS, which is an emerging approach that is attracting a lot of attention in the e-commerce industries. Although there exist extensive research in this field, most studies focus on warehouses with a traditional layout. To the best of our knowledge, this might be the first attempt to consider a non-traditional warehouse layout for a RMFS. To improve the efficiency of the system at a high level, this paper optimizes the location of workstations from a strategic design perspective. Aisle configuration is also taken into consideration to investigate the effects on expected travel distance. We first deduce the expression of travel distance from any storage location to any candidate workstation; then, we propose an integer programming model to determine the picking station location, which is a typical facility location problem. Based on this methodology, we design and conduct a variety of numerical experiments on both traditional and flying-V layouts, through which we find two rules of thumb that can replace the complex computation process: rule and rule. By using theoretical and experimental studies, we draw the following conclusions:
The flying-V layout can save 8∼26% of robot travel distance compared with a traditional layout, and the distance saving is related to the number of workstations and warehouse size. When the warehouse of a medium or large size, saving 10% in distance may only necessitate sacrificing about 2∼3% of space use.
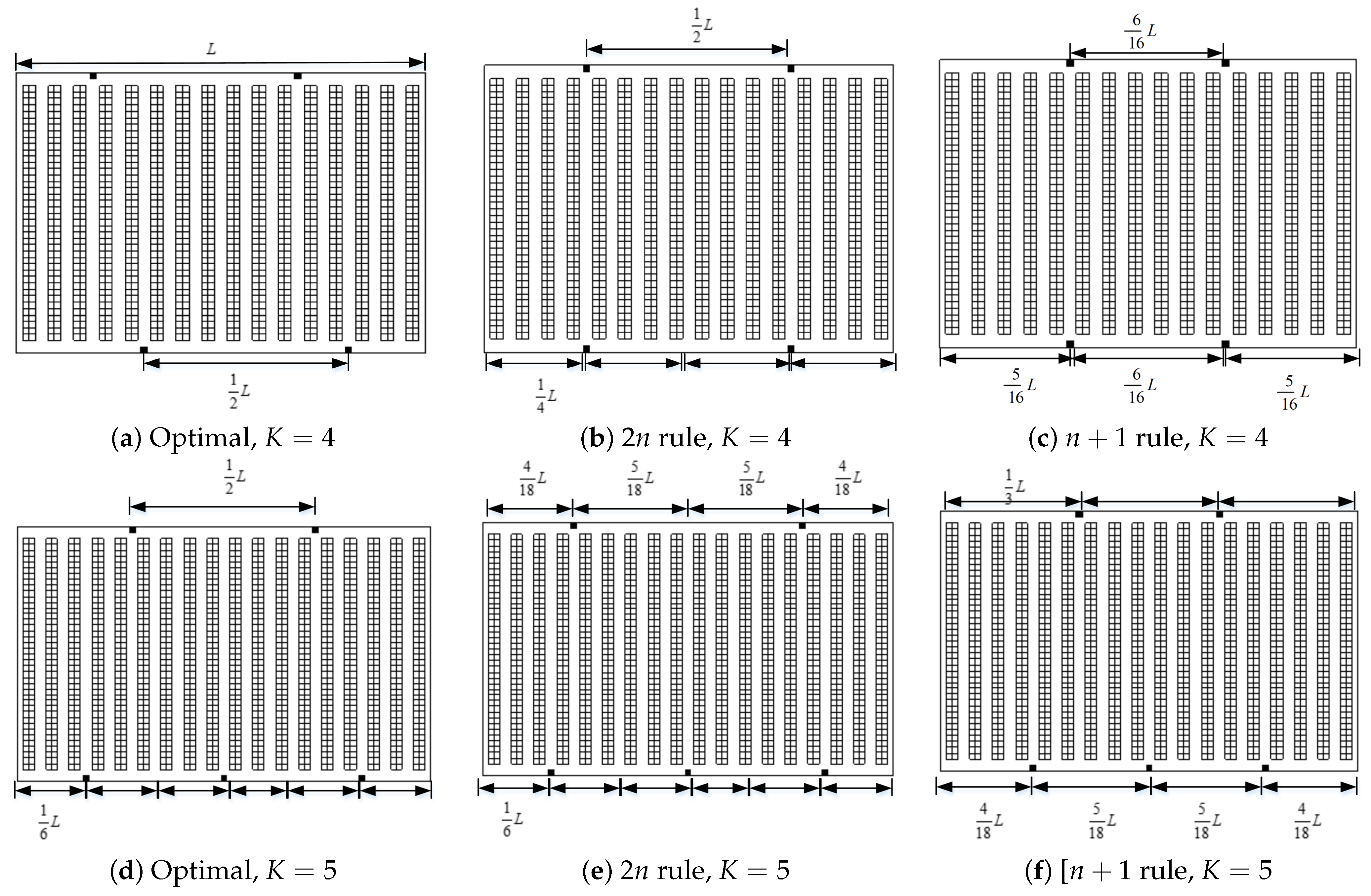
For a warehouse with a traditional layout, we can simply use the 2n rule to locate workstations; likewise, for the flying-V layout, the rule can be used to approximately locate the workstations. The travel distance gap for the two cases would be less than roughly 1.5% and 5%, respectively.
The “optimal” cross-aisle angle can be set as large as possible as long as the angled cross-aisle intersects the left or right edge of the warehouse.
There exist several limitations in this study. First, this work is based on an assumption of random storage policy. However, as in some other existing RMFS related research, more storage policies, especially the class-based policy, are worthy of further investigation. Second, the proposed IP model is solved by solver rather than well-designed efficient algorithms. Therefore, developing advanced solution methodologies for this problem and compare their performance with existing facility location related algorithms maybe a future research direction. Moreover, the optimum number of workstations is not determined in this work. We conduct the sensitivity analysis over different number of workstations, whereas the tradeoff between distance saving and construction cost is not covered. Another limitation is due to the efficiency evaluated criteria. Rather than travel distance, future studies can consider travel time or the makespan. In addition, more non-traditional warehouse layout designs can be explored in the future, such as fishbone or chevron ones. Finally, to make this work more realistic, the impact of batching decisions on layout design can also be taken into consideration in the future research, and extensive sensitivity analysis over different batching time strategies can be explored as well.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}