






A Fast Point Clouds Registration Algorithm Based on ISS-USC Feature for the 3D Laser Scanner
Abstract
:1. Introduction
2. Algorithm Principle
3. Algorithm Design
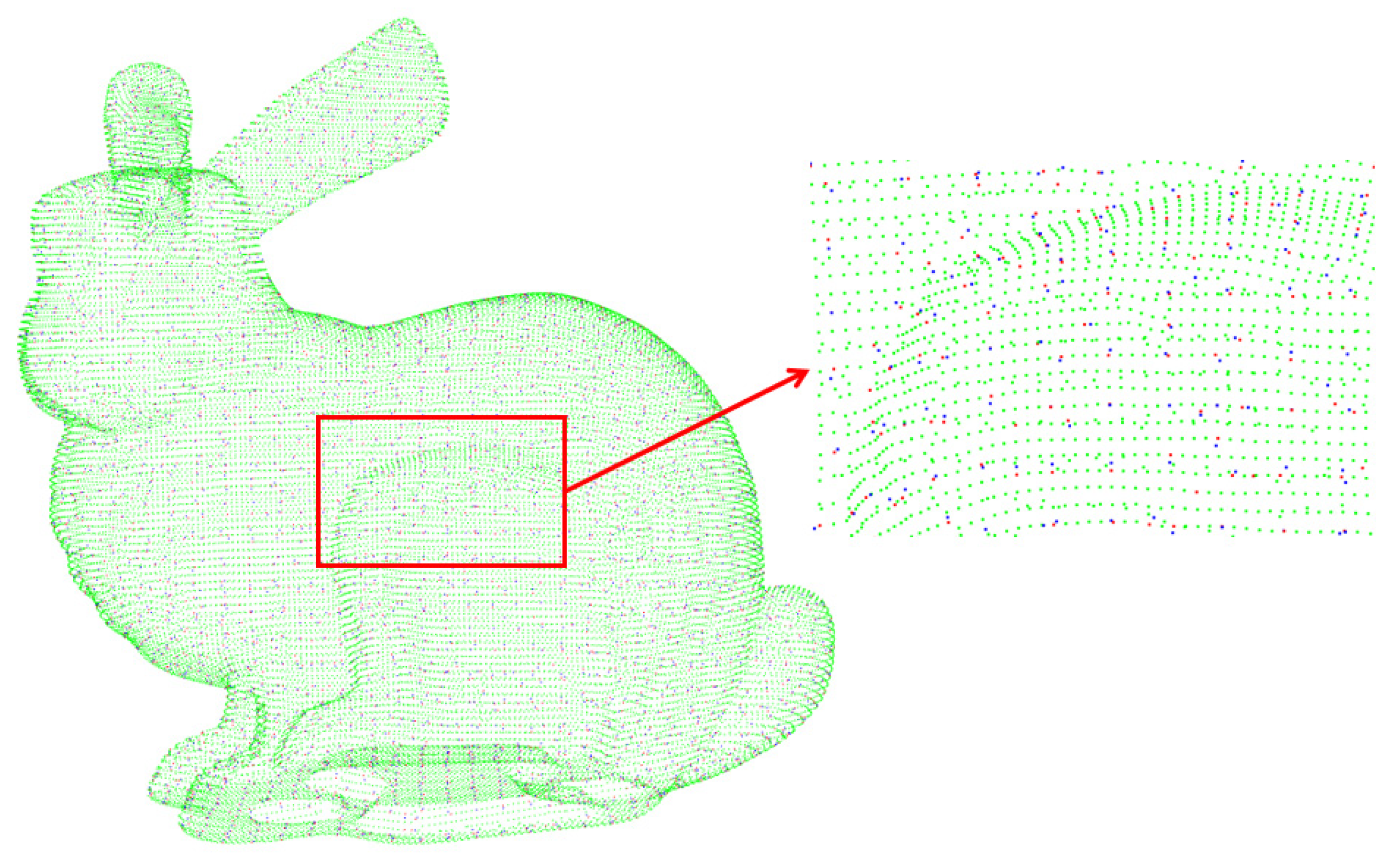
3.1. Improved Voxel Filter for Down-Sampling
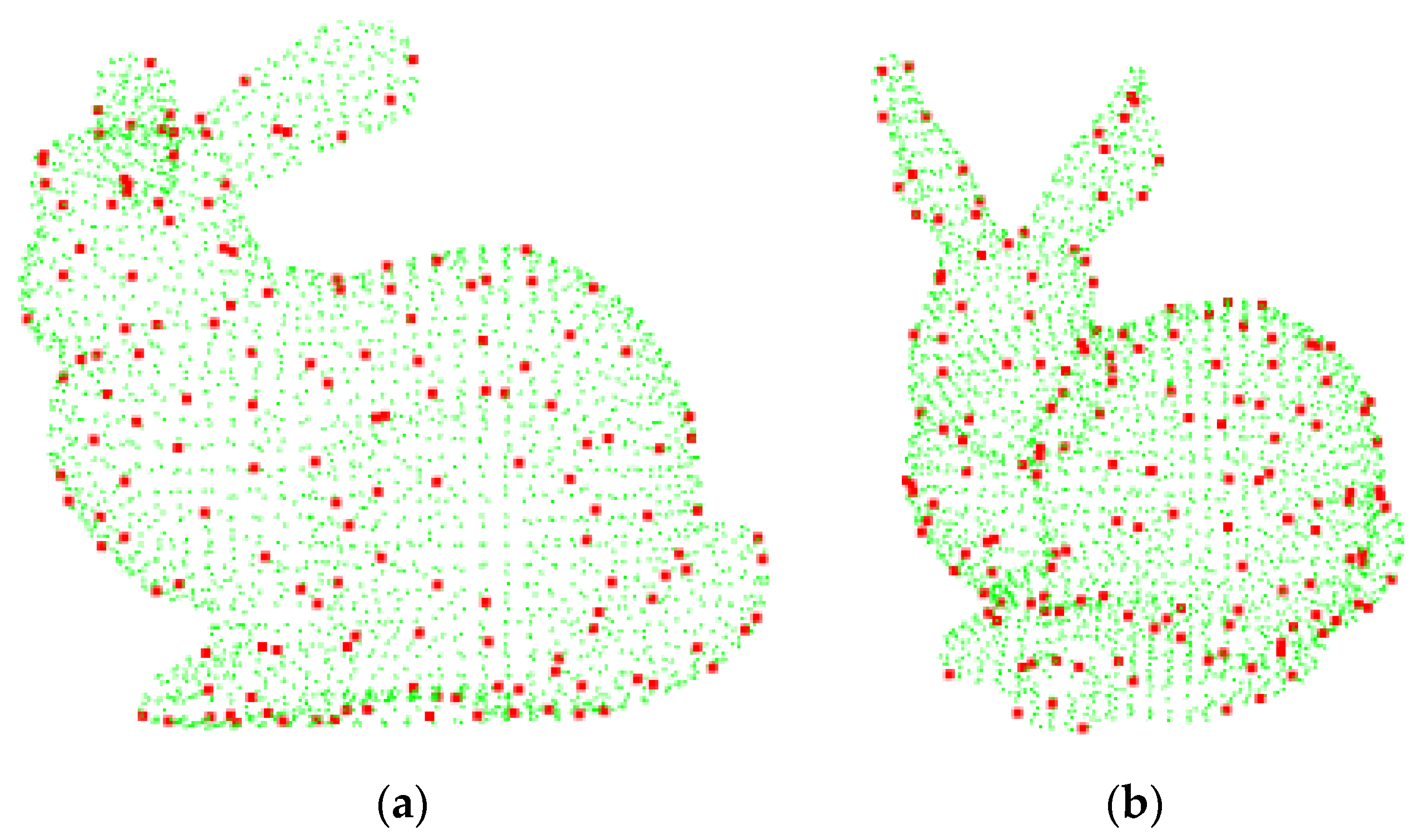
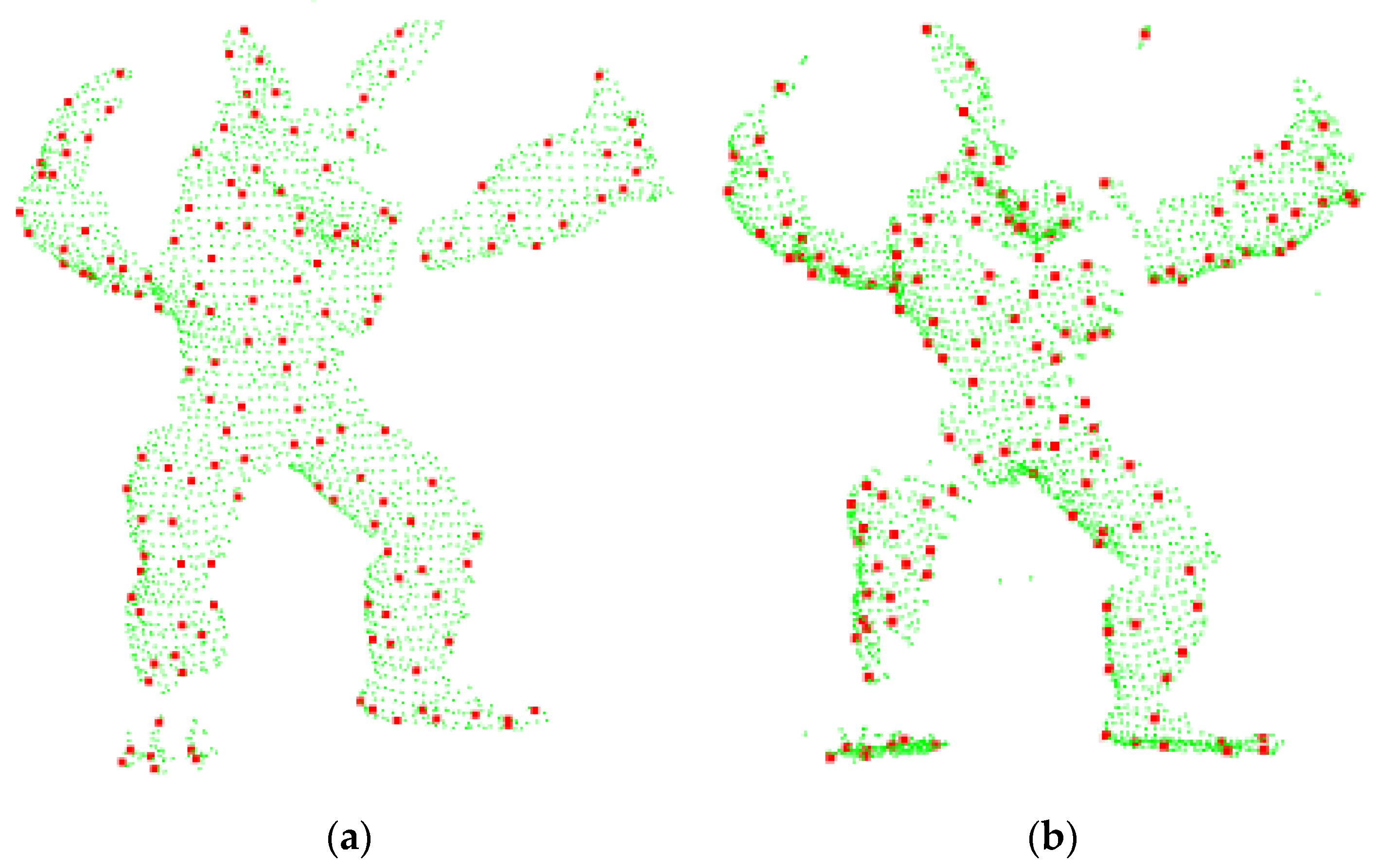
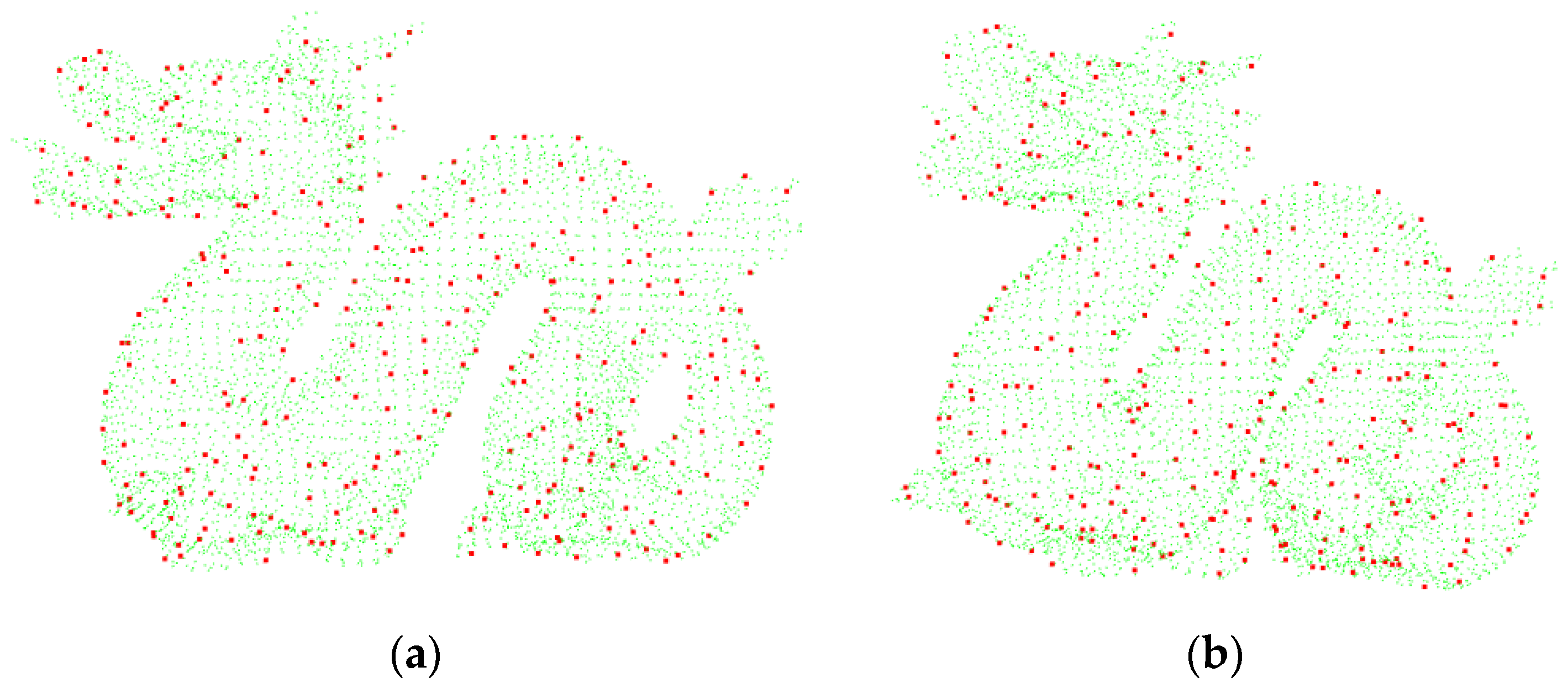
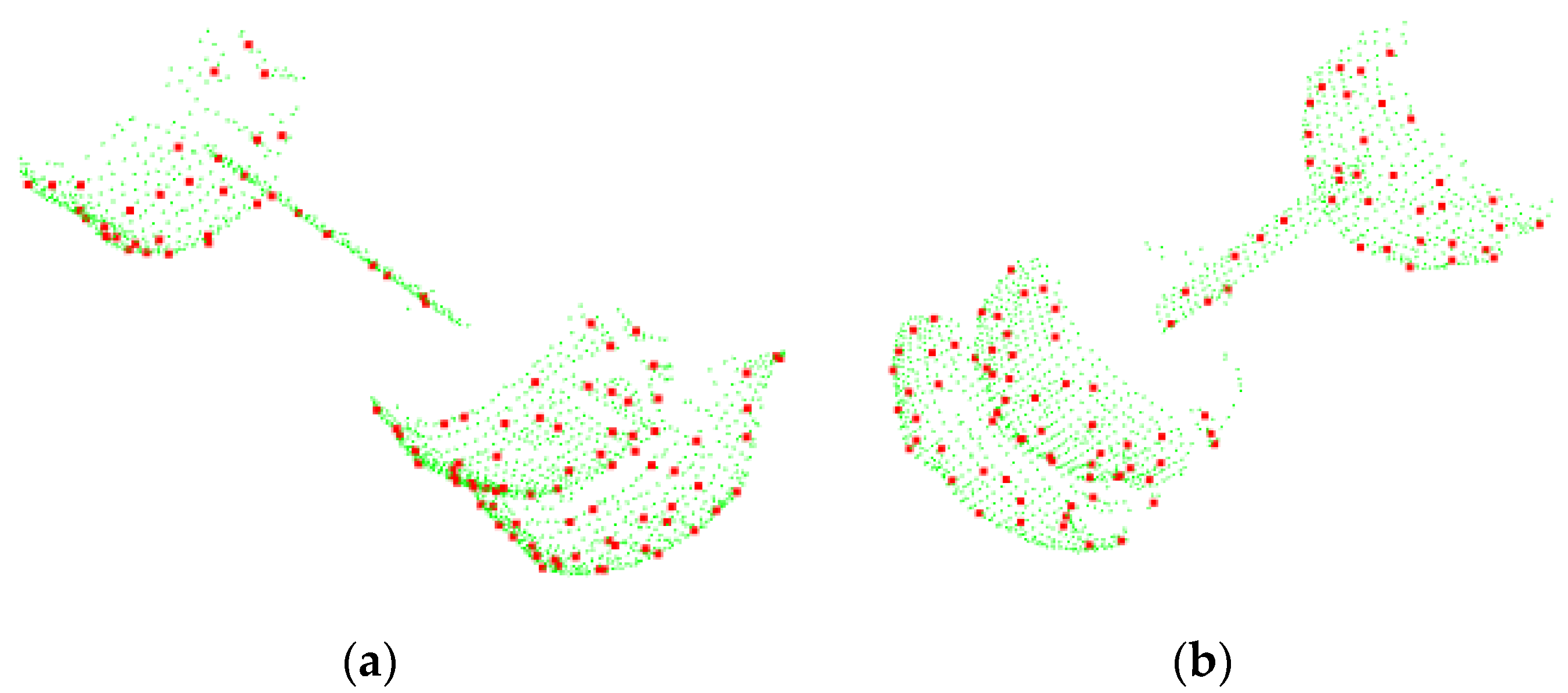
3.2. ISS Feature Points Detection Algorithm
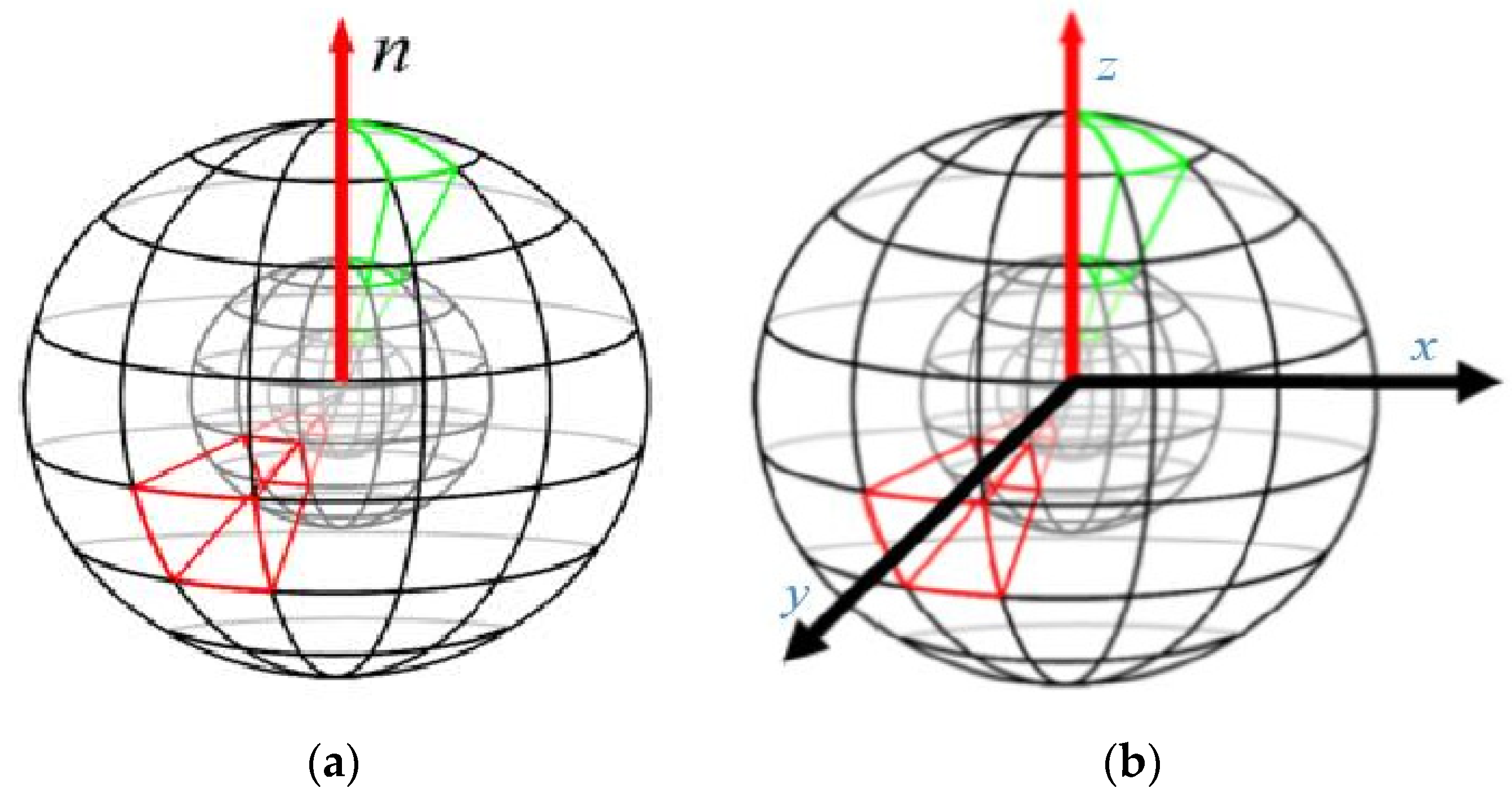
3.3. USC Descriptor
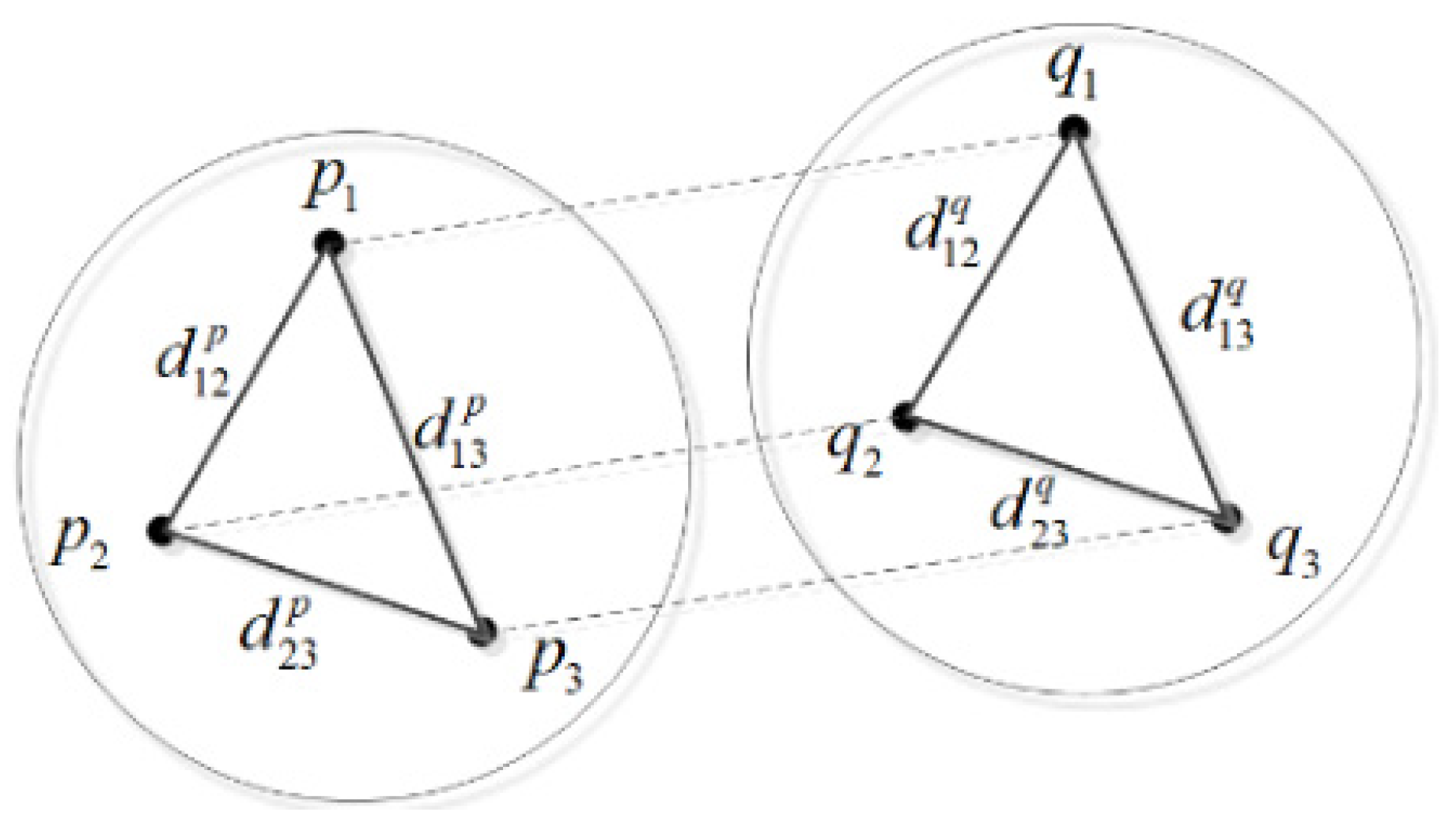
3.4. Improved RANSAC Coarse Registration
3.5. ICP Fine Registration Based on KD Tree
4. Experimental Results and Analysis
4.1. Experimental Data
4.2. Experimental Procedure
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bauer, P.; Heckler, L.; Worack, M.; Magaña, A.; Reinhart, G. Registration strategy of point clouds based on region-specific projections and virtual structures for robot-based inspection systems. Measurement 2021, 185, 109963. [Google Scholar] [CrossRef]
- Helle, R.H.; Lemu, H.G. A case study on use of 3D scanning for reverse engineering and quality control. Mater. Today Proc. 2021, 45, 5255–5262. [Google Scholar] [CrossRef]
- Yazdanpanah, M.; Xu, C.; Sharifzadeh, M. A new statistical method to segment photogrammetry data in order to obtain geological information. Int. J. Rock Mech. Min. Sci. 2022, 150, 105008. [Google Scholar] [CrossRef]
- Pepe, M.; Alfio, V.S.; Costantino, D.; Scaringi, D. Data for 3D reconstruction and point cloud classification using machine learning in cultural heritage environment. Data Brief 2022, 42, 108250. [Google Scholar] [CrossRef]
- Dong, Z.; Liang, F.; Yang, B.; Xu, Y.; Zang, Y.; Li, J.; Wang, Y.; Dai, W.; Fan, H.; Hyyppä, J.; et al. Registration of large-scale terrestrial laser scanner point clouds: A review and benchmark. ISPRS J. Photogramm. Remote Sens. 2020, 163, 327–342. [Google Scholar] [CrossRef]
- Besl, P.J.; Mckay, H.D. A method for registration of 3-D shapes. IEEE Trans Pattern Anal Mach Intell. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef] [Green Version]
- Lamine, T.M.; Tawsif, G.; Paul, C.; Malaterre, L.; Trassoudaine, L. CICP: Cluster Iterative Closest Point for Sparse-Dense Point Cloud Registration. Robot. Auton. Syst. 2018, 108, 66–86. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Li, H.; Campbell, D.; Jia, Y. Go-ICP: A Globally Optimal Solution to 3D ICP Point-Set Registration. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 2241–2254. [Google Scholar] [CrossRef] [Green Version]
- Dong, J.; Peng, Y.; Ying, S.; Hu, Z. LieTrICP: An improvement of trimmed iterative closest point algorithm. Neurocomputing 2014, 140, 67–76. [Google Scholar] [CrossRef]
- Xiong, F.; Dong, B.; Huo, W.; Min, P.; Liqun, K.; Xie, H. A Local Feature Descriptor Based on Rotational Volume for Pairwise Registration of Point Clouds. IEEE Access 2020, 8, 100120–100134. [Google Scholar]
- Wu, P.; Li, W.; Yan, M. 3D Scene Reconstruction based on improved ICP algorithm. Microprocess. Microsyst. 2020, 75, 103064. [Google Scholar] [CrossRef]
- Shen, X.; Ge, Z.; Gao, Q.; Sun, H.; Tang, X.; Cai, Q. A point cloud registration algorithm for the fusion of virtual and real maintainability test prototypes. In Proceedings of the 2022 3rd International Conference on Computing, Networks and Internet of Things (CNIOT), Qingdao, China, 20–22 May 2022; pp. 34–40. [Google Scholar] [CrossRef]
- Magnusson, M.; Lilienthal, A.; Duckett, T. Scan registration for autonomous mining vehicles using 3D-NDT. J. Field Robot. 2007, 24, 803–827. [Google Scholar] [CrossRef] [Green Version]
- Ge, X. Automatic markerless registration of point clouds with semantic-keypoint-based 4-points congruent sets. ISPRS J. Photogramm. Remote Sens. 2017, 130, 344–357. [Google Scholar] [CrossRef] [Green Version]
- Long, X.; Wen, T.; Tao, X.; Wan, T. Iterative BTreeNet: Unsupervised Learning for Large and Dense 3D Point Cloud Registration. Neurocomputing 2022, 506, 336–354. [Google Scholar]
- Ghorpade, V.K.; Checchin, P.; Malaterre, L.; Trassoudaine, L. 3D shape representation with spatial probabilistic distribution of intrinsic shape keypoints. Eurasip J. Adv. Signal Process. 2017, 2017, 52. [Google Scholar] [CrossRef] [Green Version]
- Tombari, F.; Salti, S.; Stefano, L.D. Unique shape context for 3d data description. In Proceedings of the ACM workshop on 3D object retrieval DEIS/ARCES University of Bologna Bologna, Firenze, Italy, 25 October 2010; pp. 57–62. [Google Scholar]
- Yang, L.; Li, Y.; Li, X.; Meng, Z.; Luo, H. Efficient plane extraction using normal estimation and RANSAC from 3D point cloud. Comput. Stand. Interfaces 2022, 82, 103608. [Google Scholar] [CrossRef]
- Hu, L.; Nooshabadi, S. Massive parallelization of approximate nearest neighbor search on KD-tree for high-dimensional image descriptor matching. J. Vis. Commun. Image Represent. 2017, 44, 106–115. [Google Scholar] [CrossRef]
- Mouzinho-Machado, S.; Rosado, L.; Coelho-Silva, F.; Neves, F.S.; Haiter-Neto, F.; de-Azevedo-Vaz, S.L. Influence of Voxel Size and Filter Application in Detecting Second Mesiobuccal Canals in Cone-beam Computed Tomographic Images. J. Endod. 2021, 47, 1391–1397. [Google Scholar] [CrossRef]
- Sun, H.; Liu, X.; Deng, Q.; Jiang, W.; Luo, S.; Ha, Y. Efficient FPGA Implementation of K-Nearest-Neighbor Search Algorithm for 3D LIDAR Localization and Mapping in Smart Vehicles. In Circuits and Systems II: Express Briefs; IEEE: New York, NY, USA, 2020; pp. 1644–1648. [Google Scholar]
- Bibissi, D.L.; Yang, J.; Quan, S.; Zhang, Y. Dual spin-image: A bi-directional spin-image variant using multi-scale radii for 3D local shape description. Comput. Graph. 2022, 103, 180–191. [Google Scholar] [CrossRef]
- Savelonas, M.A.; Pratikakis, I.; Sfikas, K. Fisher encoding of differential fast point feature histograms for partial 3D object retrieval. Pattern Recognit. 2016, 55, 114–124. [Google Scholar] [CrossRef]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast Point Feature Histograms (FPFH) for 3D registration. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3212–3217. [Google Scholar] [CrossRef]
- Cao, X.; Gong, X.; Xie, Q.; Huang, J.; Xu, Y.; Liu, Y.; Wang, J. Raw Scanned Point Cloud Registration with Repetition for Aircraft Fuel Tank Inspection. Comput. Aided Des. 2022, 144, 103164. [Google Scholar] [CrossRef]
- Price, M.; Green, J.; Dickens, J. Point-cloud registration using 3D shape contexts. In Proceedings of the 2012 5th Robotics and Mechatronics Conference of South Africa, Johannesbe, South Africa, 26–27 November 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, G.; Pang, Y.; Bai, Z.; Wang, Y.; Lu, Z. A Fast Point Clouds Registration Algorithm for Laser Scanners. Appl. Sci. 2021, 11, 3426. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid Size/m | 0.001 | 0.002 | 0.003 | 0.004 | 0.005 | 0.006 | 0.007 |
|---|---|---|---|---|---|---|---|
| Bunny1 points | 34,461 | 15,897 | 7822 | 4639 | 3006 | 2131 | 1567 |
| ISS feature points 1 | 66 | 1020 | 425 | 245 | 158 | 105 | 74 |
| Bunny2 points | 33,940 | 16,243 | 8053 | 4771 | 3112 | 2188 | 1605 |
| ISS feature points 2 | 59 | 1048 | 460 | 255 | 162 | 107 | 73 |
| Model | Original Point Clouds | Improved Voxel Filter Down-Sampling Points | ISS Feature Points |
|---|---|---|---|
| Bunny1 | 35,947 | 3006 | 158 |
| Bunny2 | 35,947 | 3112 | 162 |
| Armadillo1 | 204,800 | 2822 | 147 |
| Armadillo2 | 204,800 | 2758 | 138 |
| Dragon1 | 29,103 | 5611 | 283 |
| Dragon2 | 29,103 | 5704 | 272 |
| Drill1 | 204,800 | 1551 | 108 |
| Drill2 | 204,800 | 1503 | 103 |
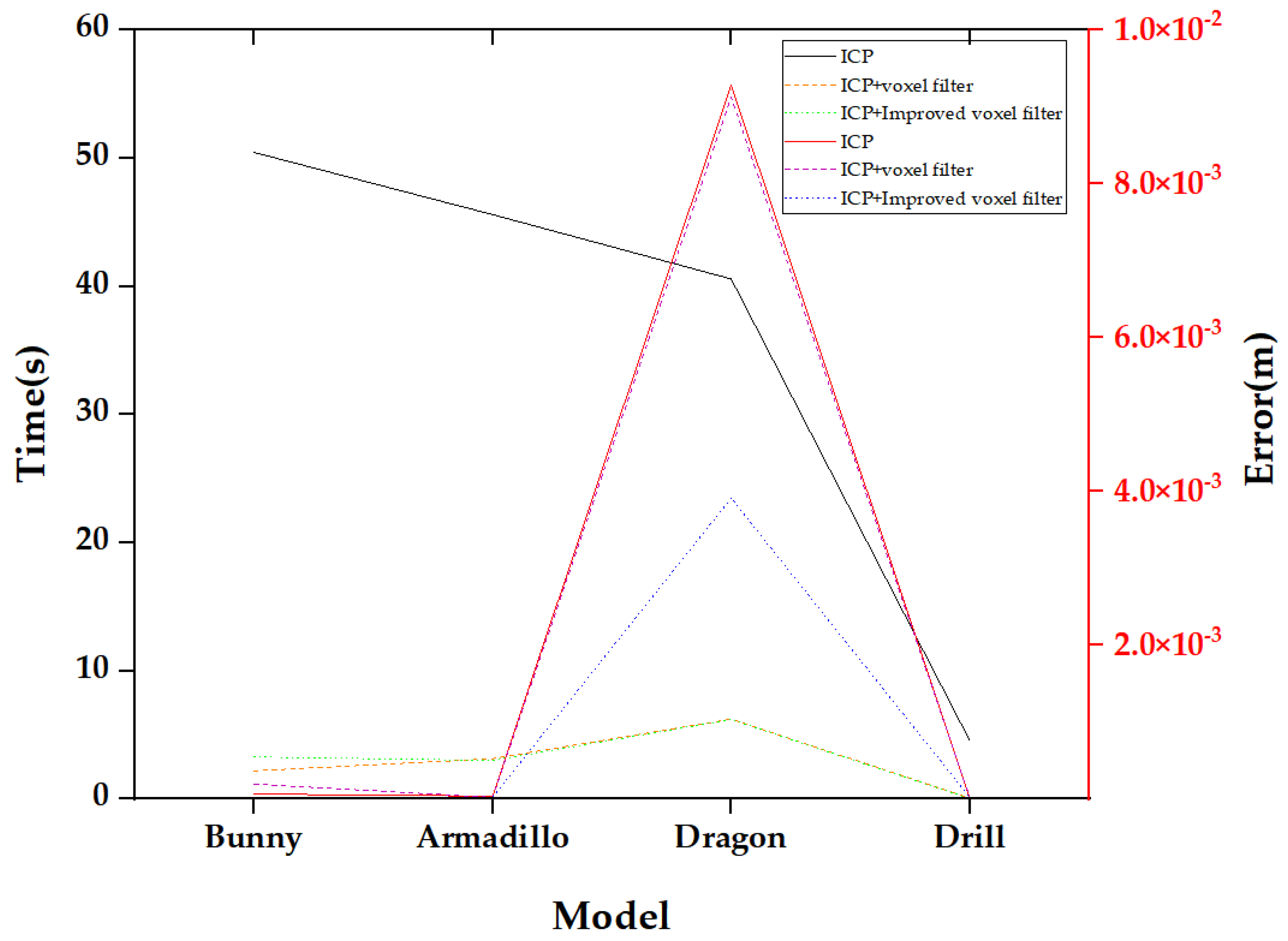
| Model | ICP | ICP+ Voxel Filter | ICP+ Improved Voxel Filter | |||
|---|---|---|---|---|---|---|
| Time | Registration Error | Time | Registration Error | Time | Registration Error | |
| Bunny | 50.451 | 6.62234 × 10−5 | 2.210 | 1.96057 × 10−4 | 3.283 | 4.37225 × 10−6 |
| Armadillo | 45.606 | 4.15124 × 10−5 | 3.162 | 2.2289 × 10−5 | 3.017 | 2.24228 × 10−5 |
| Dragon | 40.574 | 9.28518 × 10−3 | 6.246 | 9.12843 × 10−3 | 6.202 | 3.91463 × 10−3 |
| Drill | 4.558 | 1.754 × 10-5 | 0.087 | 2.30307 × 10−5 | 0.043 | 2.28272 × 10−5 |
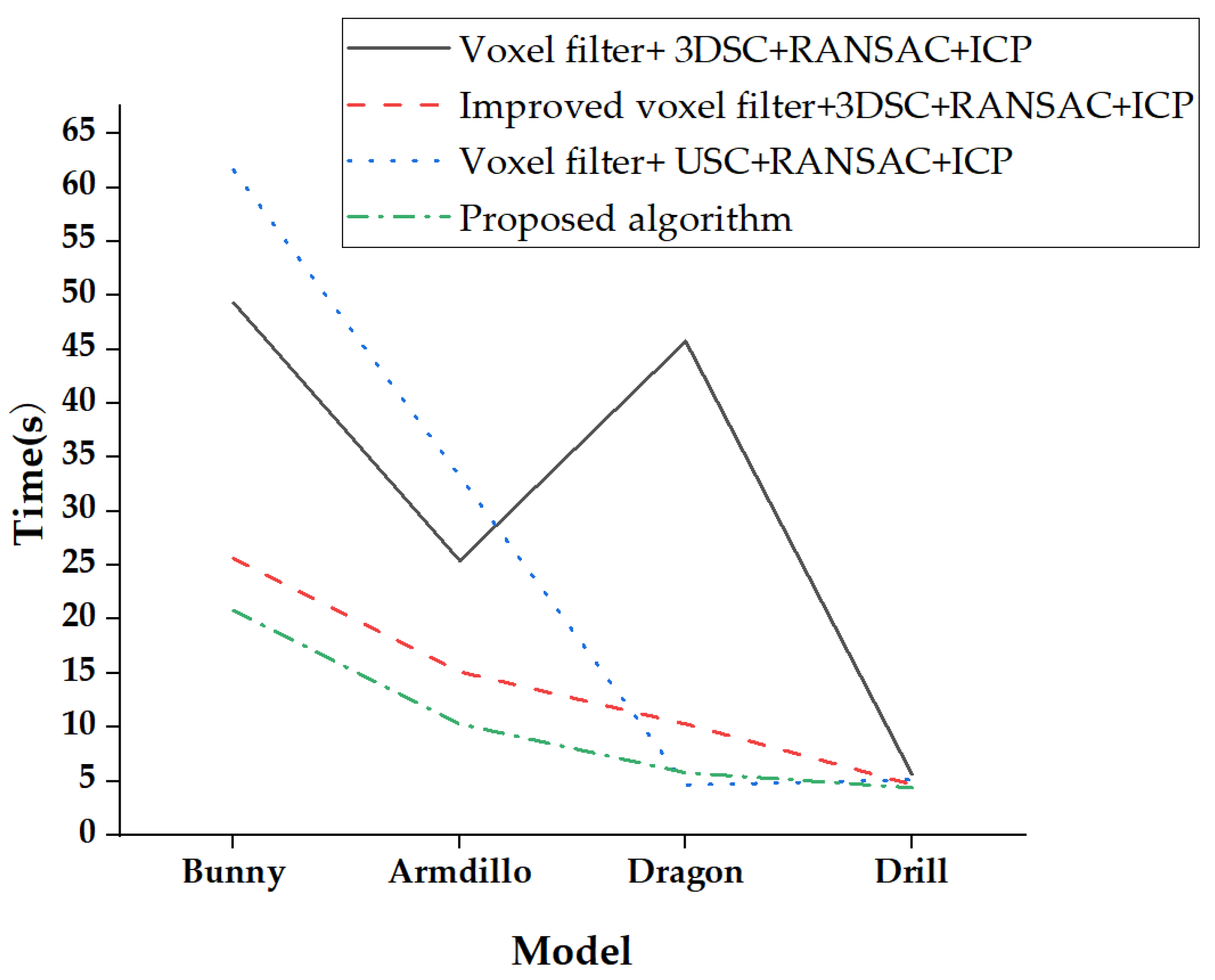
| Model | Voxel Filter+ 3DSC + RANSAC + ICP | Improved Voxel Filter + 3DSC + RANSAC + ICP | Voxel Filter+ USC + RANSAC + ICP | Proposed Algorithm |
|---|---|---|---|---|
| Bunny | 49.321 | 25.61 | 61.607 | 20.803 |
| Arm Adillo | 25.414 | 15.134 | 33.234 | 10.296 |
| Dragon | 45.74 | 10.302 | 4.649 | 5.78 |
| Drill | 5.654 | 4.69 | 5.131 | 4.386 |
| Model | Voxel Filter+ 3DSC + RANSAC + ICP | Improved Voxel Filter + 3DSC + RANSAC + ICP | Voxel Filter+ USC + RANSAC + ICP | Proposed Algorithm |
|---|---|---|---|---|
| Bunny | 6.69635 × 10−5 | 6.69635 × 10−5 | 6.69635 × 10−5 | 6.69635 × 10−5 |
| ArmAdillo | 4.06044 × 10−5 | 4.67503 × 10−5 | 4.06102 × 10−5 | 4.67117 × 10−5 |
| Dragon | 0.00233421 | 0.00229143 | 0.80076627 | 0.00228654 |
| Drill | 4.84577 × 10−6 | 4.68711 × 10−6 | 4.81674 × 10−6 | 4.71003 × 10−6 |
| Grid Size/m | 1 | 0.9 | 0.8 | 0.7 | 0.6 | 0.5 |
|---|---|---|---|---|---|---|
| Scene1 points | 22,356 | 25,454 | 29,576 | 34,833 | 41,461 | 49,313 |
| ISS feature points 1 | 990 | 1209 | 1473 | 1519 | 1832 | 2338 |
| Scene2 points | 19,840 | 23,057 | 27,153 | 32,386 | 39,514 | 47,423 |
| ISS feature points 2 | 1039 | 1273 | 1566 | 1538 | 1815 | 2377 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, A.; Ding, Y.; Mao, J.; Zhang, X. A Fast Point Clouds Registration Algorithm Based on ISS-USC Feature for the 3D Laser Scanner. Algorithms 2022, 15, 389. https://doi.org/10.3390/a15100389
Wu A, Ding Y, Mao J, Zhang X. A Fast Point Clouds Registration Algorithm Based on ISS-USC Feature for the 3D Laser Scanner. Algorithms. 2022; 15(10):389. https://doi.org/10.3390/a15100389
Chicago/Turabian StyleWu, Aihua, Yinjia Ding, Jingfeng Mao, and Xudong Zhang. 2022. "A Fast Point Clouds Registration Algorithm Based on ISS-USC Feature for the 3D Laser Scanner" Algorithms 15, no. 10: 389. https://doi.org/10.3390/a15100389
APA StyleWu, A., Ding, Y., Mao, J., & Zhang, X. (2022). A Fast Point Clouds Registration Algorithm Based on ISS-USC Feature for the 3D Laser Scanner. Algorithms, 15(10), 389. https://doi.org/10.3390/a15100389