
Image-to-Image Translation-Based Data Augmentation for Improving Crop/Weed Classification Models for Precision Agriculture Applications

 , ,
, ,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Dataset and Pre-Processing
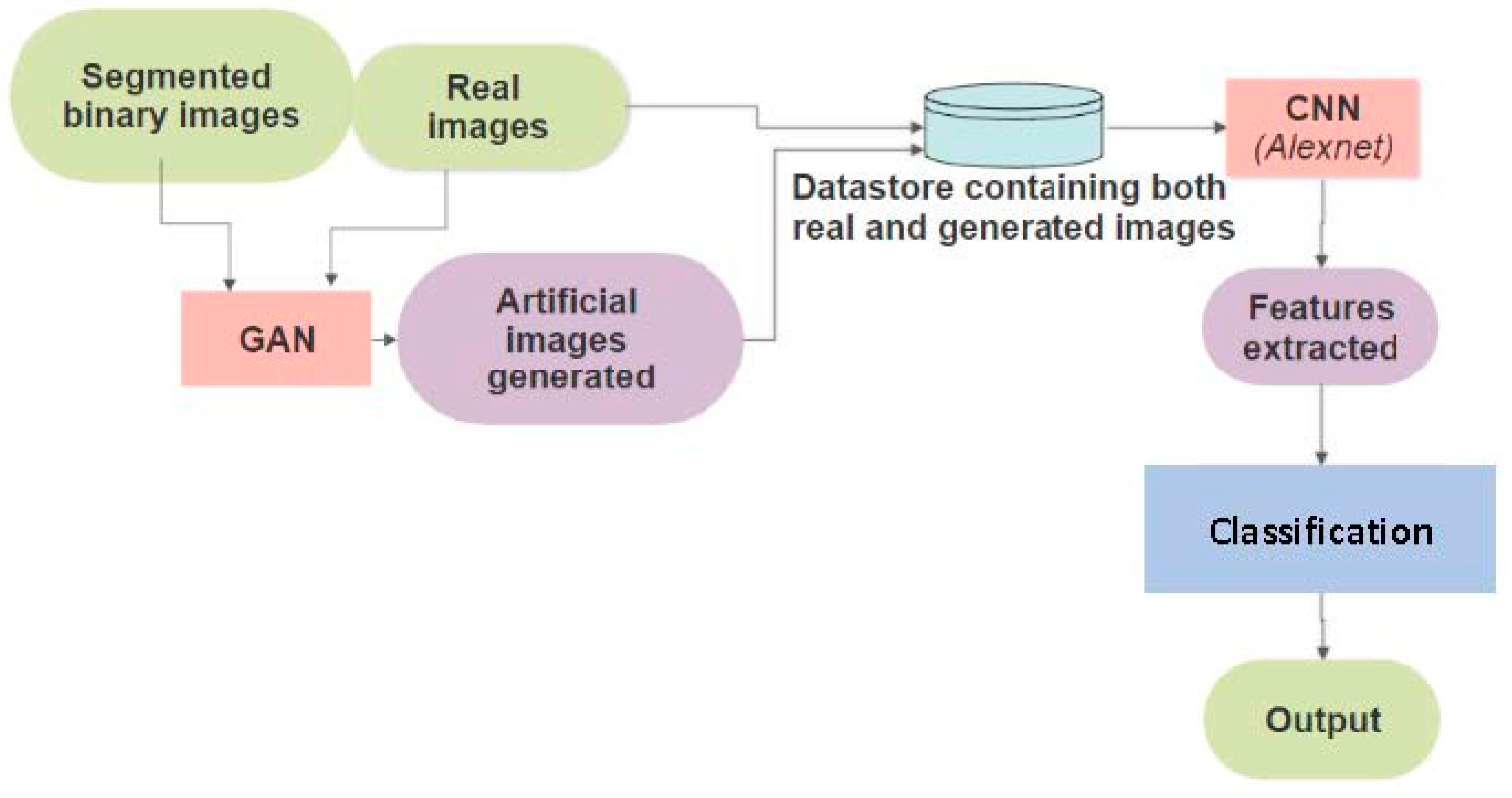
2.2. Image Synthesis through GAN
2.3. Classification through Transfer Learning
2.4. Classification through Feature Extraction Technique
2.4.1. Support Vector Classification
2.4.2. Linear Discriminant Analysis
3. Results and Discussions
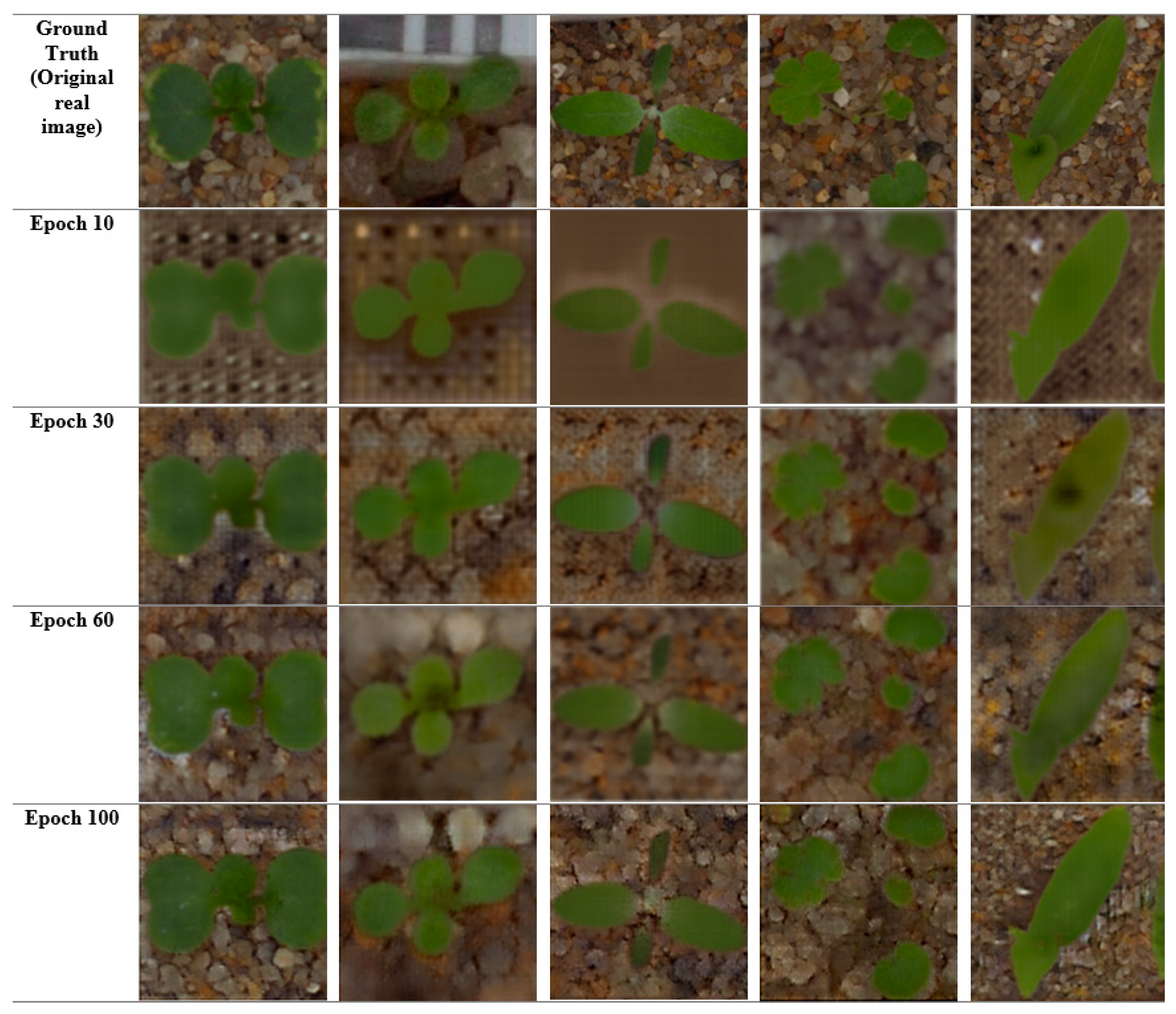
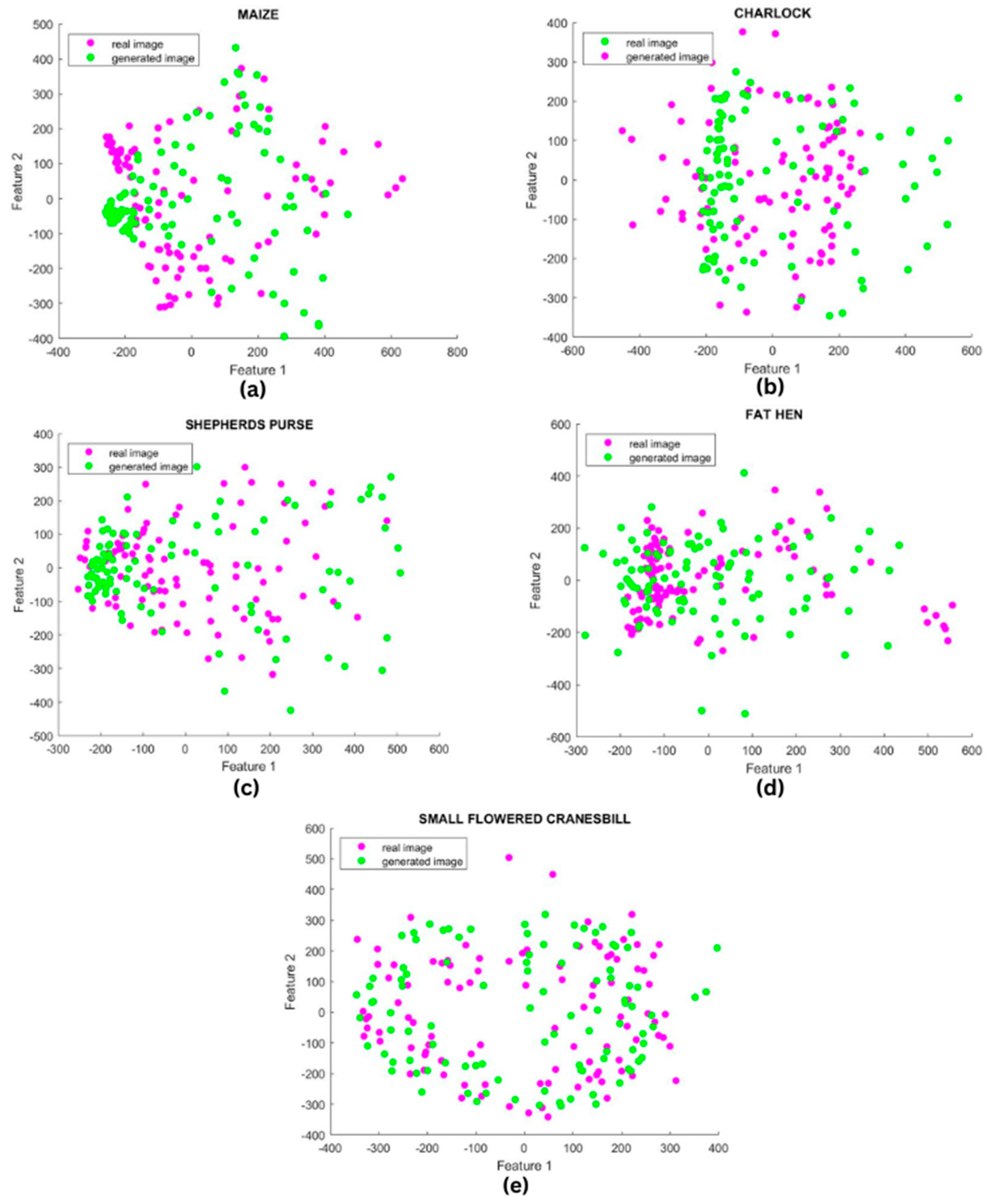
3.1. Evaluation of Generated Images
3.2. Classification Results and Evaluation
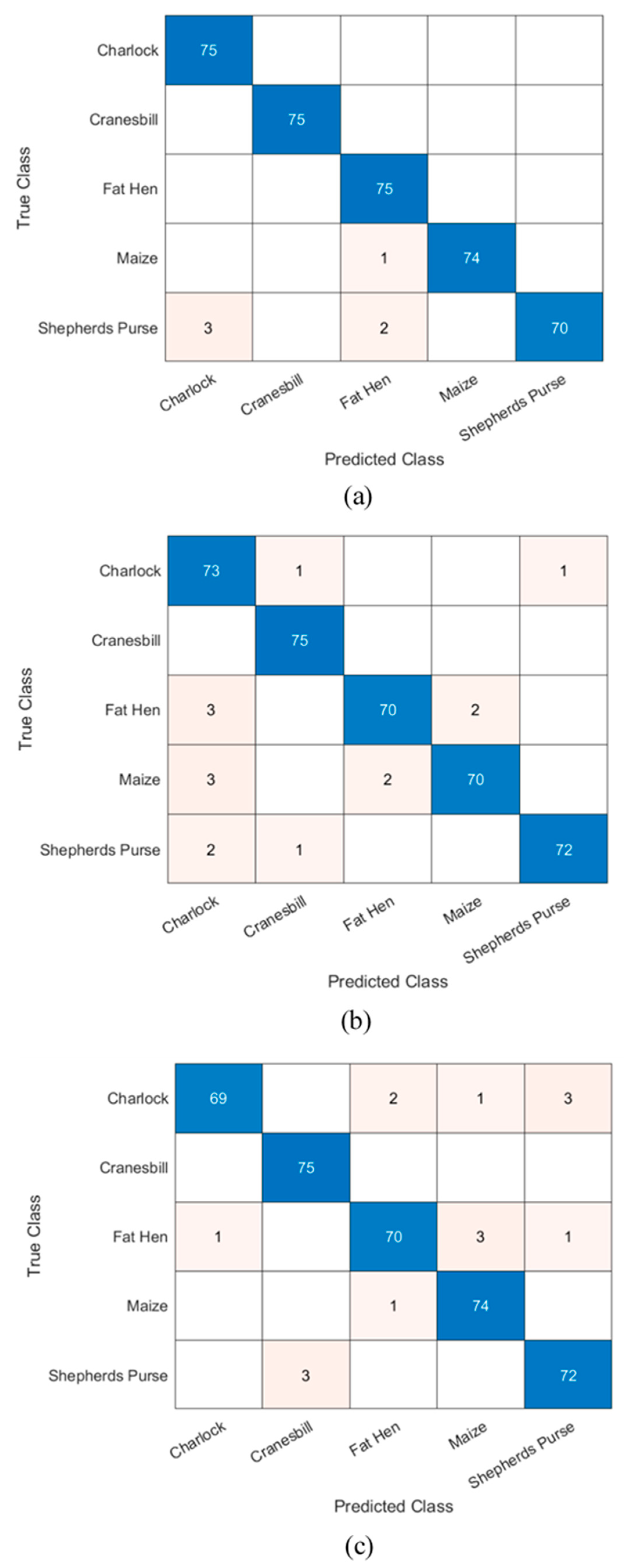
3.2.1. Performance Analysis of Transfer Learning Method
3.2.2. Performance Analysis of Feature Extraction Technique
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Q.; Liu, Y.; Gong, C.; Chen, Y.; Yu, H. Applications of Deep Learning for Dense Scenes Analysis in Agriculture: A Review. Sensors 2020, 20, 1520. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Divyanth, L.G.; Ahmad, A.; Saraswat, D. A Two-Stage Deep-Learning Based Segmentation Model for Crop Disease Quantification Based on Corn Field Imagery. Smart Agric. Technol. 2022, 3, 100108. [Google Scholar] [CrossRef]
- Liakos, K.G.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine Learning in Agriculture: A Review. Sensors 2018, 18, 2674. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Divyanth, L.G.; Chelladurai, V.; Loganathan, M.; Jayas, D.S.; Soni, P. Identification of Green Gram (Vigna Radiata) Grains Infested by Callosobruchus Maculatus Through X-Ray Imaging and GAN-Based Image Augmentation. J. Biosyst. Eng. 2022, 47, 302–317. [Google Scholar] [CrossRef]
- Wani, J.A.; Sharma, S.; Muzamil, M.; Ahmed, S.; Sharma, S.; Singh, S. Machine Learning and Deep Learning Based Computational Techniques in Automatic Agricultural Diseases Detection: Methodologies, Applications, and Challenges. Arch. Comput. Methods Eng. 2021, 29, 641–677. [Google Scholar] [CrossRef]
- Sivakumar, C.; Chaudhry, M.M.A.; Nadimi, M.; Paliwal, J.; Courcelles, J. Characterization of Roller and Ferkar-Milled Pulse Flours Using Laser Diffraction and Scanning Electron Microscopy. Powder Technol. 2022, 409, 117803. [Google Scholar] [CrossRef]
- Erkinbaev, C.; Nadimi, M.; Paliwal, J. A Unified Heuristic Approach to Simultaneously Detect Fusarium and Ergot Damage in Wheat. Meas. Food 2022, 7, 100043. [Google Scholar] [CrossRef]
- Pantazi, X.E.; Moshou, D.; Bravo, C. Active Learning System for Weed Species Recognition Based on Hyperspectral Sensing. Biosyst. Eng. 2016, 146, 193–202. [Google Scholar] [CrossRef]
- Tang, J.L.; Chen, X.Q.; Miao, R.H.; Wang, D. Weed Detection Using Image Processing under Different Illumination for Site-Specific Areas Spraying. Comput. Electron. Agric. 2016, 122, 103–111. [Google Scholar] [CrossRef]
- Raja, R.; Nguyen, T.T.; Slaughter, D.C.; Fennimore, S.A. Real-Time Weed-Crop Classification and Localisation Technique for Robotic Weed Control in Lettuce. Biosyst. Eng. 2020, 192, 257–274. [Google Scholar] [CrossRef]
- Sabzi, S.; Abbaspour-Gilandeh, Y.; Arribas, J.I. An Automatic Visible-Range Video Weed Detection, Segmentation and Classification Prototype in Potato Field. Heliyon 2020, 6, e03685. [Google Scholar] [CrossRef] [PubMed]
- Lee, W.S.; Slaughter, D.C.; Giles, D.K. Robotic Weed Control System for Tomatoes. Precis. Agric. 1999, 1, 95–113. [Google Scholar] [CrossRef]
- Utstumo, T.; Urdal, F.; Brevik, A.; Dørum, J.; Netland, J.; Overskeid, Ø.; Berge, T.W.; Gravdahl, J.T. Robotic In-Row Weed Control in Vegetables. Comput. Electron. Agric. 2018, 154, 36–45. [Google Scholar] [CrossRef]
- Chang, C.L.; Lin, K.M. Smart Agricultural Machine with a Computer Vision-Based Weeding and Variable-Rate Irrigation Scheme. Robotics 2018, 7, 38. [Google Scholar] [CrossRef] [Green Version]
- Grimstad, L.; From, P.J. The Thorvald II Agricultural Robotic System. Robotics 2017, 6, 24. [Google Scholar] [CrossRef] [Green Version]
- Yu, H.; Men, Z.; Bi, C.; Liu, H. Research on Field Soybean Weed Identification Based on an Improved UNet Model Combined With a Channel Attention Mechanism. Front. Plant Sci. 2022, 13, 1881. [Google Scholar] [CrossRef]
- Kamath, R.; Balachandra, M.; Vardhan, A.; Maheshwari, U. Classification of Paddy Crop and Weeds Using Semantic Segmentation. Cogent Eng. 2022, 9, 2018791. [Google Scholar] [CrossRef]
- Sodjinou, S.G.; Mohammadi, V.; Sanda Mahama, A.T.; Gouton, P. A Deep Semantic Segmentation-Based Algorithm to Segment Crops and Weeds in Agronomic Color Images. Inf. Process. Agric. 2022, 9, 355–364. [Google Scholar] [CrossRef]
- Lu, Y.; Young, S. A Survey of Public Datasets for Computer Vision Tasks in Precision Agriculture. Comput. Electron. Agric. 2020, 178, 105760. [Google Scholar] [CrossRef]
- Zheng, Y.Y.; Kong, J.L.; Jin, X.B.; Wang, X.Y.; Su, T.L.; Zuo, M. CropDeep: The Crop Vision Dataset for Deep-Learning-Based Classification and Detection in Precision Agriculture. Sensors 2019, 19, 1058. [Google Scholar] [CrossRef]
- Espejo-Garcia, B.; Mylonas, N.; Athanasakos, L.; Fountas, S. Improving Weeds Identification with a Repository of Agricultural Pre-Trained Deep Neural Networks. Comput. Electron. Agric. 2020, 175, 105593. [Google Scholar] [CrossRef]
- Moazzam, S.I.; Khan, U.S.; Tiwana, M.I.; Iqbal, J.; Qureshi, W.S.; Shah, S.I. A Review of Application of Deep Learning for Weeds and Crops Classification in Agriculture. In Proceedings of the 2019 International Conference on Robotics and Automation in Industry (ICRAI), Rawalpindi, Pakistan, 21–22 October 2019. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J.; Zhang, D.; Sun, Y.; Nanehkaran, Y.A. Using Deep Transfer Learning for Image-Based Plant Disease Identification. Comput. Electron. Agric. 2020, 173, 105393. [Google Scholar] [CrossRef]
- Too, E.C.; Yujian, L.; Njuki, S.; Yingchun, L. A Comparative Study of Fine-Tuning Deep Learning Models for Plant Disease Identification. Comput. Electron. Agric. 2019, 161, 272–279. [Google Scholar] [CrossRef]
- Pan, S.J.; Yang, Q. A Survey on Transfer Learning. IEEE Trans. Knowl. Data Eng. 2010, 22, 1345–1359. [Google Scholar] [CrossRef]
- Espejo-Garcia, B.; Mylonas, N.; Athanasakos, L.; Fountas, S.; Vasilakoglou, I. Towards Weeds Identification Assistance through Transfer Learning. Comput. Electron. Agric. 2020, 171, 105306. [Google Scholar] [CrossRef]
- Chen, D.; Lu, Y.; Li, Z.; Young, S. Performance Evaluation of Deep Transfer Learning on Multi-Class Identification of Common Weed Species in Cotton Production Systems. Comput. Electron. Agric. 2022, 198, 107091. [Google Scholar] [CrossRef]
- Xu, Y.; Zhai, Y.; Zhao, B.; Jiao, Y.; Kong, S.; Zhou, Y.; Gao, Z. Weed Recognition for Depthwise Separable Network Based on Transfer Learning. Intell. Autom. Soft Comput. 2021, 27, 669–682. [Google Scholar] [CrossRef]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative Adversarial Nets. Adv. Neural Inf. Process. Syst. 2014, 27, 139–144. [Google Scholar]
- Zheng, Z.; Zheng, L.; Yang, Y. Unlabeled Samples Generated by GAN Improve the Person Re-Identification Baseline in vitro. In Proceedings of the 2017 International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 3774–3782. [Google Scholar] [CrossRef]
- Frid-Adar, M.; Klang, E.; Amitai, M.; Goldberger, J.; Greenspan, H. Synthetic Data Augmentation Using GAN for Improved Liver Lesion Classification. In Proceedings of the 2018 IEEE 15th International Symposium on Biomedical Imaging (ISBI 2018), Washington, DC, USA, 4–7 April 2018; pp. 289–293. [Google Scholar] [CrossRef]
- Zhu, X.; Liu, Y.; Li, J.; Wan, T.; Qin, Z. Emotion Classification with Data Augmentation Using Generative Adversarial Networks. In Advances in Knowledge Discovery and Data Mining; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2018; Volume 10939 LNAI, pp. 349–360. [Google Scholar] [CrossRef]
- Giuffrida, M.V.; Scharr, H.; Tsaftaris, S.A. ARIGAN: Synthetic Arabidopsis Plants Using Generative Adversarial Network. In Proceedings of the 2017 International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2064–2071. [Google Scholar] [CrossRef]
- Divyanth, L.G.; Marzougui, A.; González-Bernal, M.J.; McGee, R.J.; Rubiales, D.; Sankaran, S. Evaluation of Effective Class-Balancing Techniques for CNN-Based Assessment of Aphanomyces Root Rot Resistance in Pea (Pisum sativum L.). Sensors 2022, 22, 7237. [Google Scholar] [CrossRef]
- Arsenovic, M.; Karanovic, M.; Sladojevic, S.; Anderla, A.; Stefanovic, D. Solving Current Limitations of Deep Learning Based Approaches for Plant Disease Detection. Symmetry 2019, 11, 939. [Google Scholar] [CrossRef] [Green Version]
- Madsen, S.L.; Dyrmann, M.; Jørgensen, R.N.; Karstoft, H. Generating Artificial Images of Plant Seedlings Using Generative Adversarial Networks. Biosyst. Eng. 2019, 187, 147–159. [Google Scholar] [CrossRef]
- Espejo-Garcia, B.; Mylonas, N.; Athanasakos, L.; Vali, E.; Fountas, S. Combining Generative Adversarial Networks and Agricultural Transfer Learning for Weeds Identification. Biosyst. Eng. 2021, 204, 79–89. [Google Scholar] [CrossRef]
- Fawakherji, M.; Potena, C.; Pretto, A.; Bloisi, D.D.; Nardi, D. Multi-Spectral Image Synthesis for Crop/Weed Segmentation in Precision Farming. Rob. Auton. Syst. 2021, 146, 103861. [Google Scholar] [CrossRef]
- Khan, S.; Tufail, M.; Khan, M.T.; Khan, Z.A.; Iqbal, J.; Alam, M. A Novel Semi-Supervised Framework for UAV Based Crop/Weed Classification. PLoS ONE 2021, 16, e0251008. [Google Scholar] [CrossRef] [PubMed]
- Isola, P.; Zhu, J.Y.; Zhou, T.; Efros, A.A. Image-to-Image Translation with Conditional Adversarial Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 5967–5976. [Google Scholar] [CrossRef] [Green Version]
- Khurana, G.; Bawa, N.K. Weed Detection Approach Using Feature Extraction and KNN Classification. In Advances in Electromechanical Technologies; Lecture Notes in Mechanical Engineering; Springer: Singapore, 2021; pp. 671–679. [Google Scholar] [CrossRef]
- Jin, X.; Che, J.; Chen, Y. Weed Identification Using Deep Learning and Image Processing in Vegetable Plantation. IEEE Access 2021, 9, 10940–10950. [Google Scholar] [CrossRef]
- Wang, A.; Zhang, W.; Wei, X. A Review on Weed Detection Using Ground-Based Machine Vision and Image Processing Techniques. Comput. Electron. Agric. 2019, 158, 226–240. [Google Scholar] [CrossRef]
- Sunil, G.C.; Zhang, Y.; Koparan, C.; Ahmed, M.R.; Howatt, K.; Sun, X. Weed and Crop Species Classification Using Computer Vision and Deep Learning Technologies in Greenhouse Conditions. J. Agric. Food Res. 2022, 9, 100325. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012, 60, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Giselsson, T.M.; Jørgensen, R.N.; Jensen, P.K.; Dyrmann, M.; Midtiby, H.S. A Public Image Database for Benchmark of Plant Seedling Classification Algorithms. arXiv 2017, arXiv:1711.05458. [Google Scholar] [CrossRef]
- Mirza, M.; Osindero, S. Conditional Generative Adversarial Nets. arXiv 2014, arXiv:1411.1784. [Google Scholar] [CrossRef]
- Reed, S.; Akata, Z.; Yan, X.; Logeswaran Reedscot, L.; Schiele, B.; Lee Schiele, H. Generative Adversarial Text to Image Synthesis. In Proceedings of the International Conference on Machine Learning (ICML 2016), New York, NY, USA, 19–24 June 2016; pp. 1060–1069. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention 2015, Munich, Germany, 5–9 October 2015; Volume 9351, pp. 234–241. [Google Scholar] [CrossRef]
- Li, C.; Wand, M. Precomputed Real-Time Texture Synthesis with Markovian Generative Adversarial Networks. In Proceedings of the European Conference on Computer Vision 2016, Amsterdam, The Netherlands, 11–14 October 2016; Volume 9907 LNCS, pp. 702–716. [Google Scholar] [CrossRef] [Green Version]
- van der Maaten, L.; Hinton, G. Visualizing Data Using T-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. ImageNet Large Scale Visual Recognition Challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef] [Green Version]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. ImageNet: A Large-Scale Hierarchical Image Database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2010; pp. 248–255. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going Deeper with Convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 2015, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- Wiatowski, T.; Bolcskei, H. A Mathematical Theory of Deep Convolutional Neural Networks for Feature Extraction. IEEE Trans. Inf. Theory 2018, 64, 1845–1866. [Google Scholar] [CrossRef] [Green Version]
- Nanehkaran, Y.A.; Zhang, D.; Chen, J.; Tian, Y.; Al-Nabhan, N. Recognition of Plant Leaf Diseases Based on Computer Vision. J. Ambient Intell. Humaniz. Comput. 2020, 1, 1–18. [Google Scholar] [CrossRef]
- Wu, L.; Wen, Y. Weed/Corn Seedling Recognition by Support Vector Machine Using Texture Features. African J. Agric. Res. 2009, 4, 840–846. [Google Scholar]
- Wu, L.; Wen, Y. Application of Support Vector Machine for Identifying Single Corn/Weed Seedling in Fields Using Shape Parameters. In Proceedings of the 2nd International Conference on Information Science and Engineering, Hangzhou, China, 4–6 December 2010. [Google Scholar] [CrossRef]
- Wong, W.K.; Chekima, A.; Mariappan, M.; Khoo, B.; Nadarajan, M. Probabilistic Multi SVM Weed Species Classification for Weed Scouting and Selective Spot Weeding. In Proceedings of the 2014 IEEE International Symposium on Robotics and Manufacturing Automation (ROMA), Kuala Lumpur, Malaysia, 15–16 December 2014; pp. 63–68. [Google Scholar] [CrossRef]
- Karimi, Y.; Prasher, S.O.; Patel, R.M.; Kim, S.H. Application of Support Vector Machine Technology for Weed and Nitrogen Stress Detection in Corn. Comput. Electron. Agric. 2006, 51, 99–109. [Google Scholar] [CrossRef]
- Venkataraju, A.; Arumugam, D.; Stepan, C.; Kiran, R.; Peters, T. A Review of Machine Learning Techniques for Identifying Weeds in Corn. Smart Agric. Technol. 2022, 3, 100102. [Google Scholar] [CrossRef]
- Friedman, J.H. Regularized Discriminant Analysis. J. Am. Stat. Assoc. 1989, 84, 165–175. [Google Scholar] [CrossRef]
- Guo, Y.; Hastie, T.; Tibshirani, R. Regularized Linear Discriminant Analysis and Its Application in Microarrays. Biostatistics 2007, 8, 86–100. [Google Scholar] [CrossRef] [Green Version]
- Qadri, S.; Khan, D.M.; Ahmad, F.; Qadri, S.F.; Babar, M.E.; Shahid, M.; Ul-Rehman, M.; Razzaq, A.; Shah Muhammad, S.; Fahad, M.; et al. A Comparative Study of Land Cover Classification by Using Multispectral and Texture Data. Biomed Res. Int. 2016, 2016, 8797438. [Google Scholar] [CrossRef]
- Nadimi, M.; Loewen, G.; Paliwal, J. Assessment of Mechanical Damage to Flaxseeds Using Radiographic Imaging and Tomography. Smart Agric. Technol. 2022, 2, 100057. [Google Scholar] [CrossRef]
- Ahmed, F.; Bari, A.S.M.H.; Shihavuddin, A.S.M.; Al-Mamun, H.A.; Kwan, P. A Study on Local Binary Pattern for Automated Weed Classification Using Template Matching and Support Vector Machine. In Proceedings of the 2011 IEEE 12th International Symposium on Computational Intelligence and Informatics (CINTI), Budapest, Hungary, 21–22 November 2011; pp. 329–334. [Google Scholar] [CrossRef]
- Siddiqi, M.H.; Lee, S.-W.; Khan, A.M. Weed Image Classification Using Wavelet Transform, Stepwise Linear Discriminant Analysis, and Support Vector Machines for an Automatic Spray Control System. J. Inf. Sci. Eng. 2014, 30, 1227–1244. [Google Scholar] [CrossRef]
- Suh, H.K.; IJsselmuiden, J.; Hofstee, J.W.; van Henten, E.J. Transfer Learning for the Classification of Sugar Beet and Volunteer Potato under Field Conditions. Biosyst. Eng. 2018, 174, 50–65. [Google Scholar] [CrossRef]
- Sabzi, S.; Abbaspour, Y.; Nadimi, M.; Paliwal, J. Non-destructive estimation of physicochemical properties and detection of ripeness level of apples using machine vision. Int. J. Fruit Sci. 2022, 22, 628–645. [Google Scholar] [CrossRef]
- Kheiralipour, K.; Nadimi, M.; Paliwal, J. Development of an Intelligent Imaging System for Ripeness Determination of Wild Pistachios. Sensors 2022, 22, 7134. [Google Scholar] [CrossRef] [PubMed]
- Hosainpour, A.; Kheiralipour, K.; Nadimi, M.; Paliwal, J. Quality assessment of dried white mulberry (Morus alba L.) using machine vision. Horticulturae, 2022; In press. [Google Scholar]
- Li, X.; Guillermic, R.M.; Nadimi, M.; Paliwal, J.; Koksel, F. Physical and microstructural quality of extruded snacks made from blends of barley and green lentil flours. Cereal Chem. 2022, 99, 1112–1123. [Google Scholar] [CrossRef]
- Nadimi, M.; Divyanth, L.G.; Paliwal, J. Automated detection of mechanical damage in flaxseeds using radiographic imaging and machine learning. Foods Bioprocess Technol. 2022. In press. [Google Scholar]
- Nadimi, M.; Brown, J.M.; Morrison, J.; Paliwal, J. Examination of wheat kernels for the presence of Fusarium damage and mycotoxins using near-infrared hyperspectral imaging. Meas. Food 2021, 4, 100011. [Google Scholar] [CrossRef]
- Nadimi, M.; Loewen, G.; Bhowmik, P.; Paliwal, J. Effect of laser biostimulation on germination of sub-optimally stored flaxseeds (Linum usitatissimum). Sustainability 2022, 14, 12183. [Google Scholar] [CrossRef]
- Nadimi, M.; Sun, D.W.; Paliwal, J. Effect of laser biostimulation on germination of wheat. ASABE Appl. Eng. Agric. 2022, 38, 77–84. [Google Scholar] [CrossRef]
- Nadimi, M.; Sun, D.W.; Paliwal, J. Recent applications of novel laser techniques for enhancing agricultural production. Laser Phys. 2021, 31, 053001. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Purpose | Crop Production System | Image Synthesis Technique | Results/Conclusion | Reference |
|---|---|---|---|---|
| Synthetic RGB images of individual tomato and black night-shade plants were generated for improving classification performance. | Tomato | Conventional GANs | F1-score of 0.86 was obtained when GAN-based augmentation was performed, compared to 0.84 without the artificial dataset. | [37] |
| Generation of multi-spectral images of agricultural fields for semantic segmentation of crop/weeds. | Sugarbeet | Conditional GAN (cGAN) | Intersection over union (mIoU) value was improved to 0.98 from 0.94 for background class and to 0.89 from 0.76 for vegetation. | [38] |
| Artificial data were generated using UAV-acquired images for supporting crop/weed species identification at an early stage. | Strawberry and peas | Semi-supervised GAN (SGAN) | Classification accuracy of 90% was achieved using only 20% of labelled dataset. | [39] |
| Dataset | Charlock | Fat Hen | Shepherd’s Purse | Cranesbill | Maize |
|---|---|---|---|---|---|
| Real images | 200 | 200 | 200 | 200 | 200 |
| Artificial images | 200 | 200 | 200 | 200 | 200 |
| Total | 400 | 400 | 400 | 400 | 400 |
| Training images | 325 | 325 | 325 | 325 | 325 |
| Test images | 75 | 75 | 75 | 75 | 75 |
| Class Name | Precision | Recall | F1-Score | |||
|---|---|---|---|---|---|---|
| TL | GAN-TL | TL | GAN-TL | TL | GAN-TL | |
| Charlock | 0.9493 | 0.9615 | 1.0000 | 1.0000 | 0.9739 | 0.9804 |
| Fat Hen | 0.9136 | 0.9868 | 0.9867 | 1.0000 | 0.9487 | 0.9934 |
| Shepherd’s Purse | 1.0000 | 1.0000 | 0.8801 | 0.9333 | 0.9362 | 0.9655 |
| Cranesbill | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 |
| Maize | 1.0000 | 1.0000 | 0.9867 | 0.9867 | 0.9933 | 0.9933 |
| Class Name | Precision | Recall | F1-Score | |||
|---|---|---|---|---|---|---|
| TL | SVM-TL | TL | SVM-TL | TL | SVM-TL | |
| Charlock | 0.8537 | 0.9012 | 0.9333 | 0.9733 | 0.8975 | 0.9358 |
| Fat Hen | 0.9571 | 0.9722 | 0.8933 | 0.9333 | 0.9241 | 0.9523 |
| Shepherd’s Purse | 0.9589 | 0.9863 | 0.9333 | 0.9333 | 0.9459 | 0.9591 |
| Cranesbill | 0.9726 | 0.9740 | 0.9467 | 0.9600 | 0.9594 | 0.9669 |
| Maize | 0.9351 | 0.9722 | 0.9600 | 1.0000 | 0.9474 | 0.9859 |
| Class Name | Precision | Recall | F1-Score | |||
|---|---|---|---|---|---|---|
| TL | LDA-TL | TL | LDA-TL | TL | LDA-TL | |
| Charlock | 0.9853 | 0.9857 | 0.8933 | 0.9200 | 0.9370 | 0.9517 |
| Fat Hen | 0.9324 | 0.9589 | 0.9200 | 0.9333 | 0.9261 | 0.9459 |
| Shepherd’s Purse | 0.9452 | 0.9474 | 0.9200 | 0.9600 | 0.9324 | 0.9537 |
| Cranesbill | 0.9242 | 0.9615 | 1.0000 | 1.0000 | 0.9606 | 0.9804 |
| Maize | 0.9367 | 0.9487 | 0.9867 | 0.9867 | 0.9611 | 0.9673 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Divyanth, L.G.; Guru, D.S.; Soni, P.; Machavaram, R.; Nadimi, M.; Paliwal, J. Image-to-Image Translation-Based Data Augmentation for Improving Crop/Weed Classification Models for Precision Agriculture Applications. Algorithms 2022, 15, 401. https://doi.org/10.3390/a15110401
Divyanth LG, Guru DS, Soni P, Machavaram R, Nadimi M, Paliwal J. Image-to-Image Translation-Based Data Augmentation for Improving Crop/Weed Classification Models for Precision Agriculture Applications. Algorithms. 2022; 15(11):401. https://doi.org/10.3390/a15110401
Chicago/Turabian StyleDivyanth, L. G., D. S. Guru, Peeyush Soni, Rajendra Machavaram, Mohammad Nadimi, and Jitendra Paliwal. 2022. "Image-to-Image Translation-Based Data Augmentation for Improving Crop/Weed Classification Models for Precision Agriculture Applications" Algorithms 15, no. 11: 401. https://doi.org/10.3390/a15110401
APA StyleDivyanth, L. G., Guru, D. S., Soni, P., Machavaram, R., Nadimi, M., & Paliwal, J. (2022). Image-to-Image Translation-Based Data Augmentation for Improving Crop/Weed Classification Models for Precision Agriculture Applications. Algorithms, 15(11), 401. https://doi.org/10.3390/a15110401