

Stable Evaluation of 3D Zernike Moments for Surface Meshes


Abstract
:1. Introduction
2. Moments from 3D Shapes
2.1. Moments of a Shape
- (i)
- Orthonormality. The set of functions is orthonormal iffor all and in ( is the Kronecker symbol, i.e., if , and 0 otherwise).
- (ii)
- Completeness. The set of functions is complete if for all functions :
2.2. Basis Function: Monomials
2.3. Basis Function: Laplace Spherical Harmonics
2.4. Basis Function: The Zernike Polynomials
2.5. Computing the Zernike Polynomials from the Geometric Moments
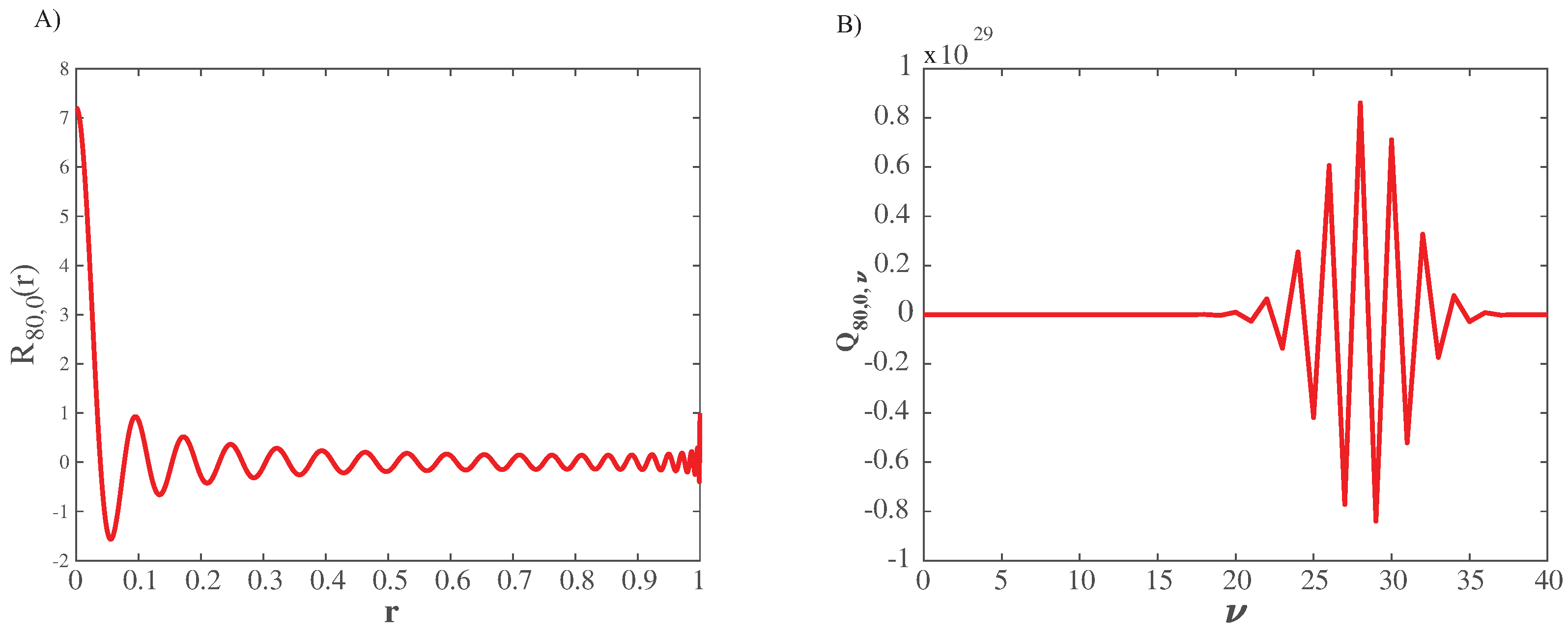
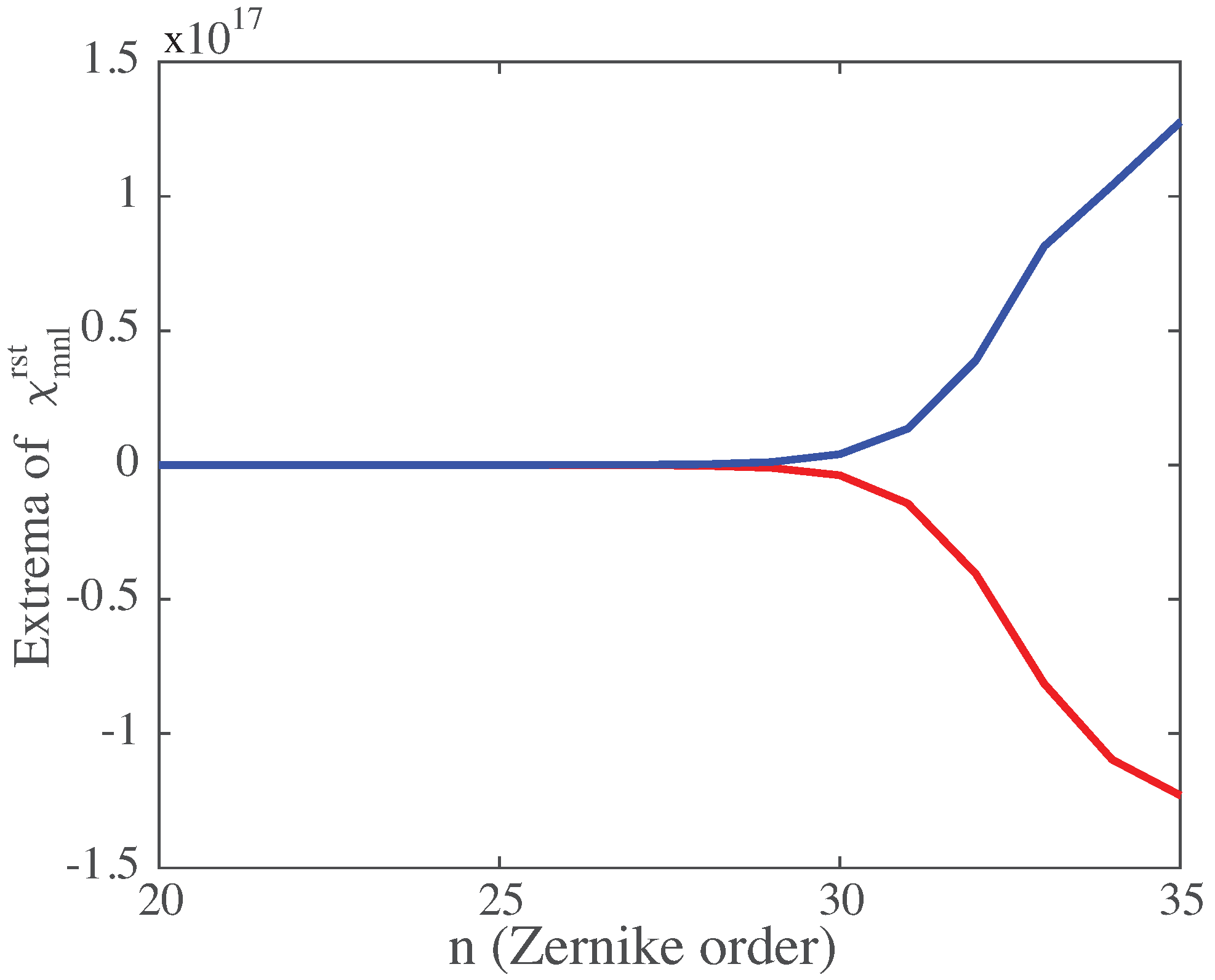
2.6. Numerical Instabilities Associated with the Zernike Polynomials
3. Algorithms for Computing the 3D Zernike Moments for a Surface Triangular Mesh
3.1. Zernike Moments over a Shape Defined by a Triangular Surface Mesh
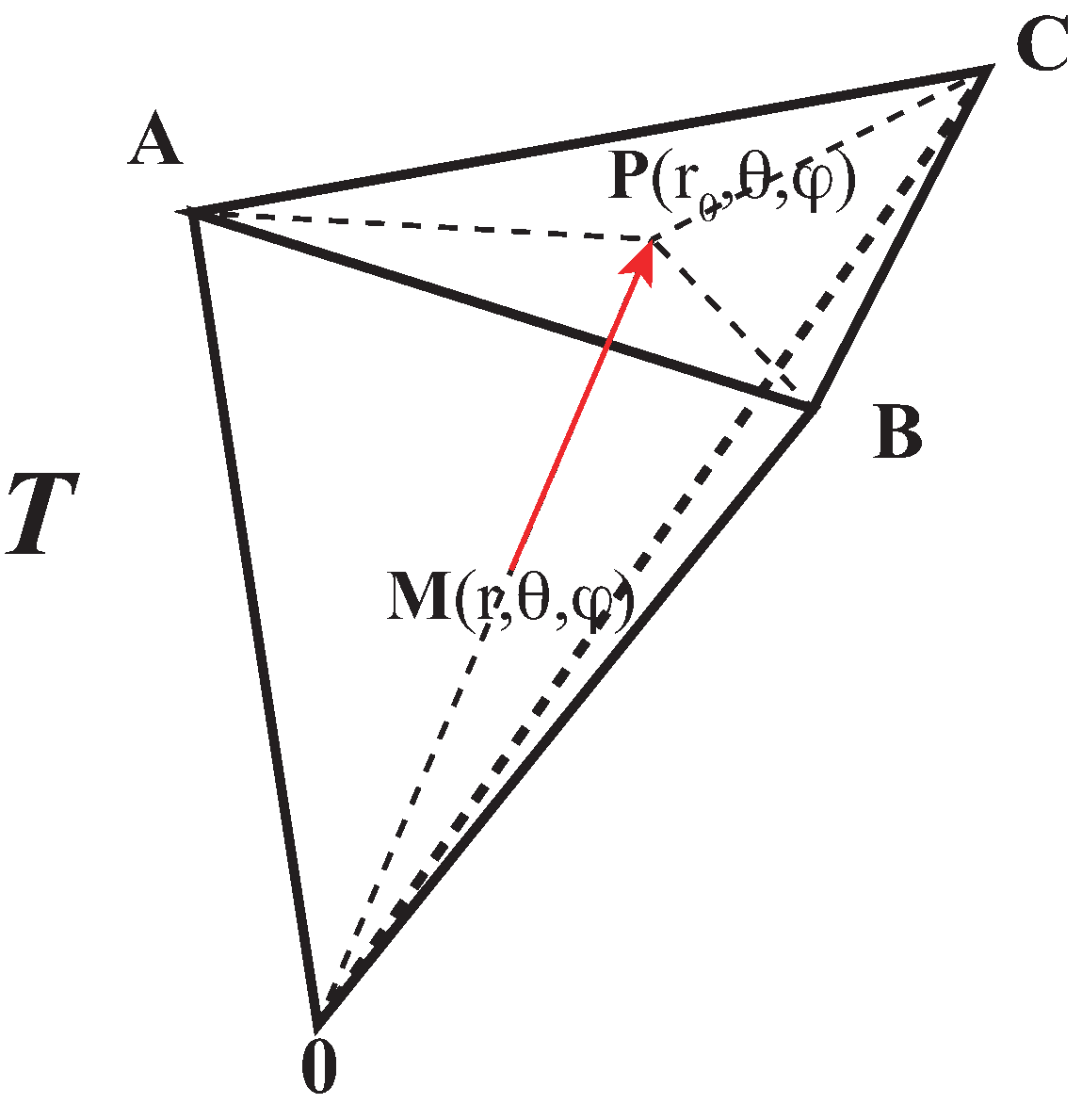
3.2. Basic Idea
- (i)
- For a given inside the triangle T with distance to the origin O, compute the radial integral
- (ii)
- Integrate over all points in the triangle T to get:
3.3. Computing the Integrals
3.4. Computing the Integrals
- (a)
- Exactness. As mentioned above, a 2D quadrature may be exact if it is applied on a polynomial. This is our case. Indeed, recall that is a polynomial function of degree , with as a factor. The function g can then be rewritten aswhere are the harmonic polynomials (see Equation (5)). As is of degree and is of degree l, the function g is a 2D polynomial function of degree n. A quadrature rule of strength n will therefore integrate g exactly.
- (b)
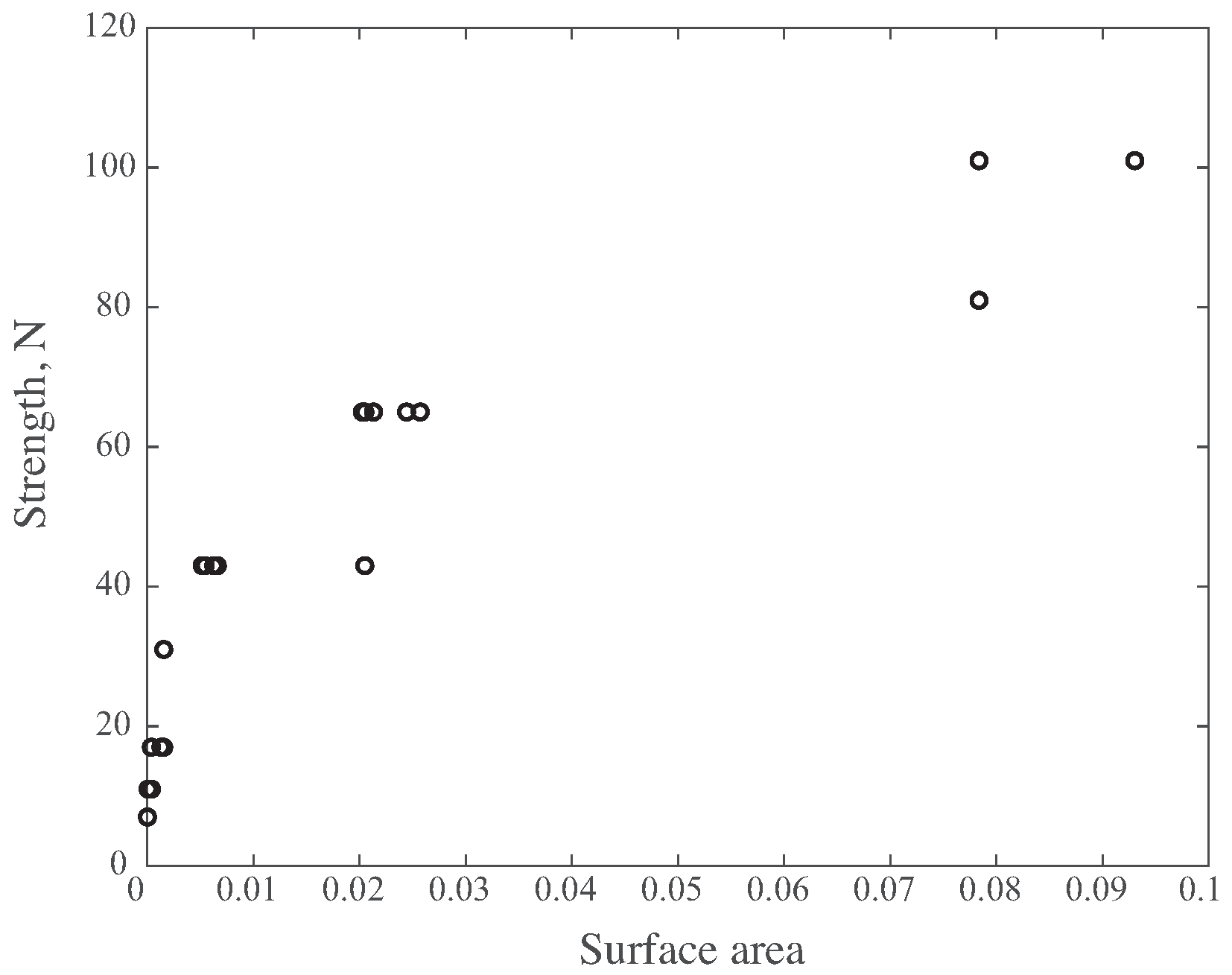
- Number of points for the quadrature, while it is well known that an n-point Gaussian rule is exact for all polynomials of degree up to in one dimension, the situation is more complex in higher dimensions. Xiao and Gimbutas [60] proposed an empirical rule for the minimal number of points to integrate exactly a polynomial of order n:
3.5. Two Algorithms for Computing Zernike Moments
| Algorithm 1Zernike moments associated with one triangle of a surface mesh |
|
| Algorithm 2Exact Zernike moments for surface triangular meshes |
|
3.5.1. Exact Zernike Moments for Shapes Described by Surface Triangular Meshes
| Algorithm 3Finite precision Zernike moments for surface triangular meshes |
|
3.5.2. Finite Precision Zernike Moments for Shapes Described by Surface Triangular Meshes
| Algorithm 4Adaptive computation of Zernike moments associated with one triangle of a surface mesh |
|
| Algorithm 5Recursive computation of Zernike moments associated with one triangle of a surface mesh |
|
4. Reconstructing a Shape from Its 3D Zernike Moments
5. Implementation
- (1)
- Definitions of the quadrature rules for integration on a triangle,
- (2)
- Efficient computations of and ,
- (3)
- Efficient computations of the spherical harmonics .
5.1. Quadrature Rules for Integration over a Triangle
5.2. Efficient Computations of the Polynomials and
5.3. Efficient Computations of the Spherical Harmonics
5.4. Efficient Reconstruction of a Shape from Its Zernike Moments
6. Numerical Results
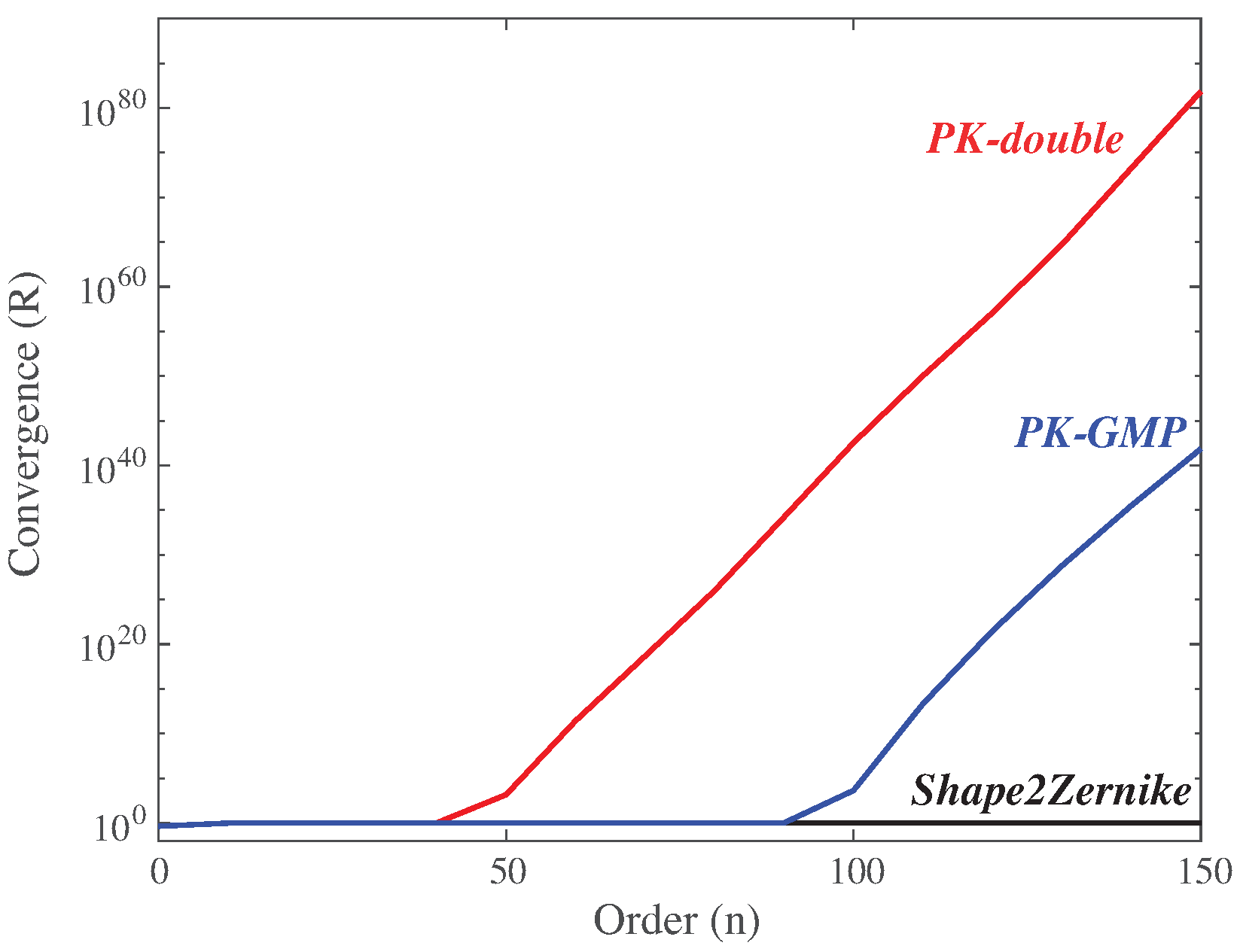
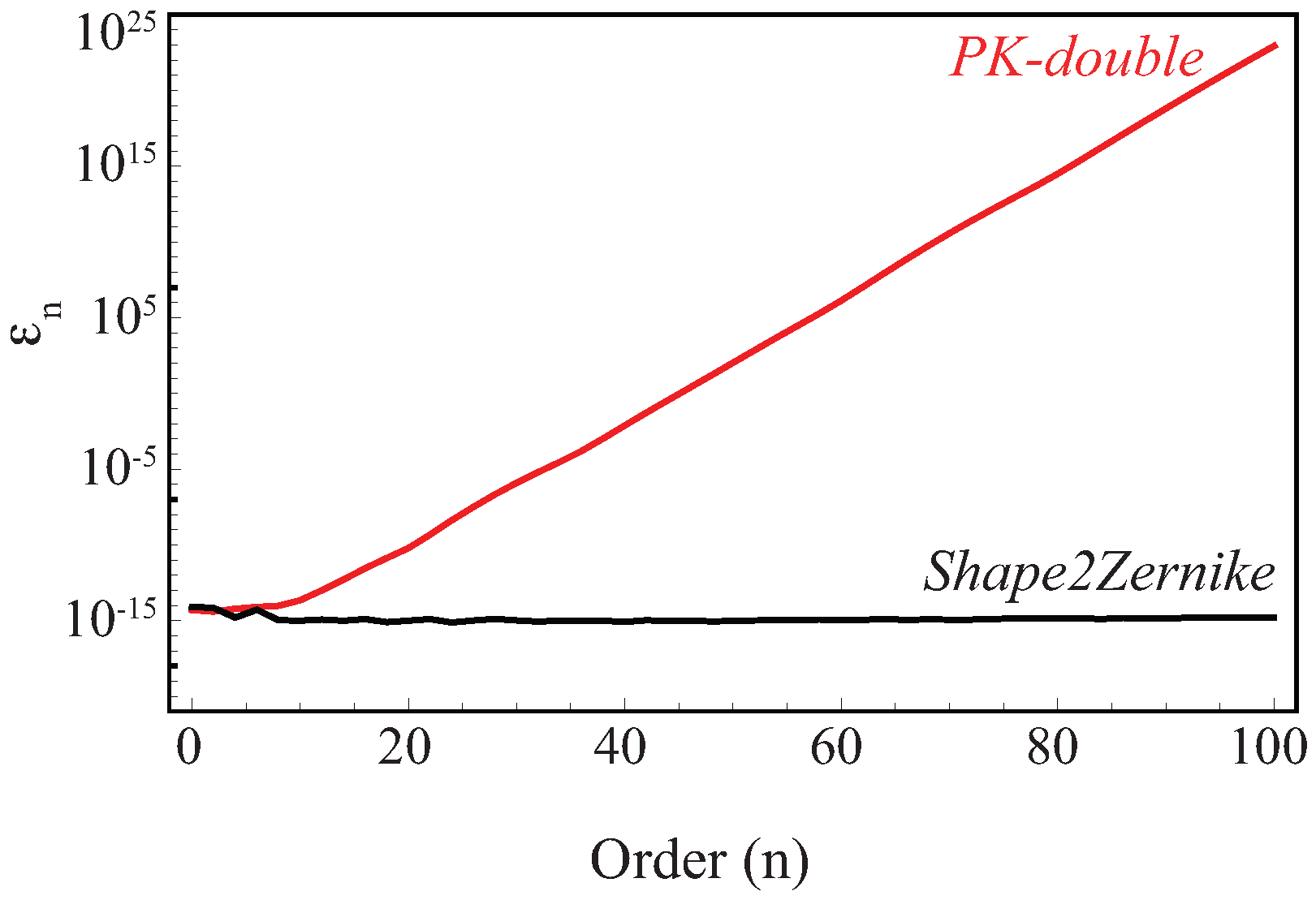
6.1. Accuracy of the Computed 3D Zernike Moments: Comparison with Other Algorithms
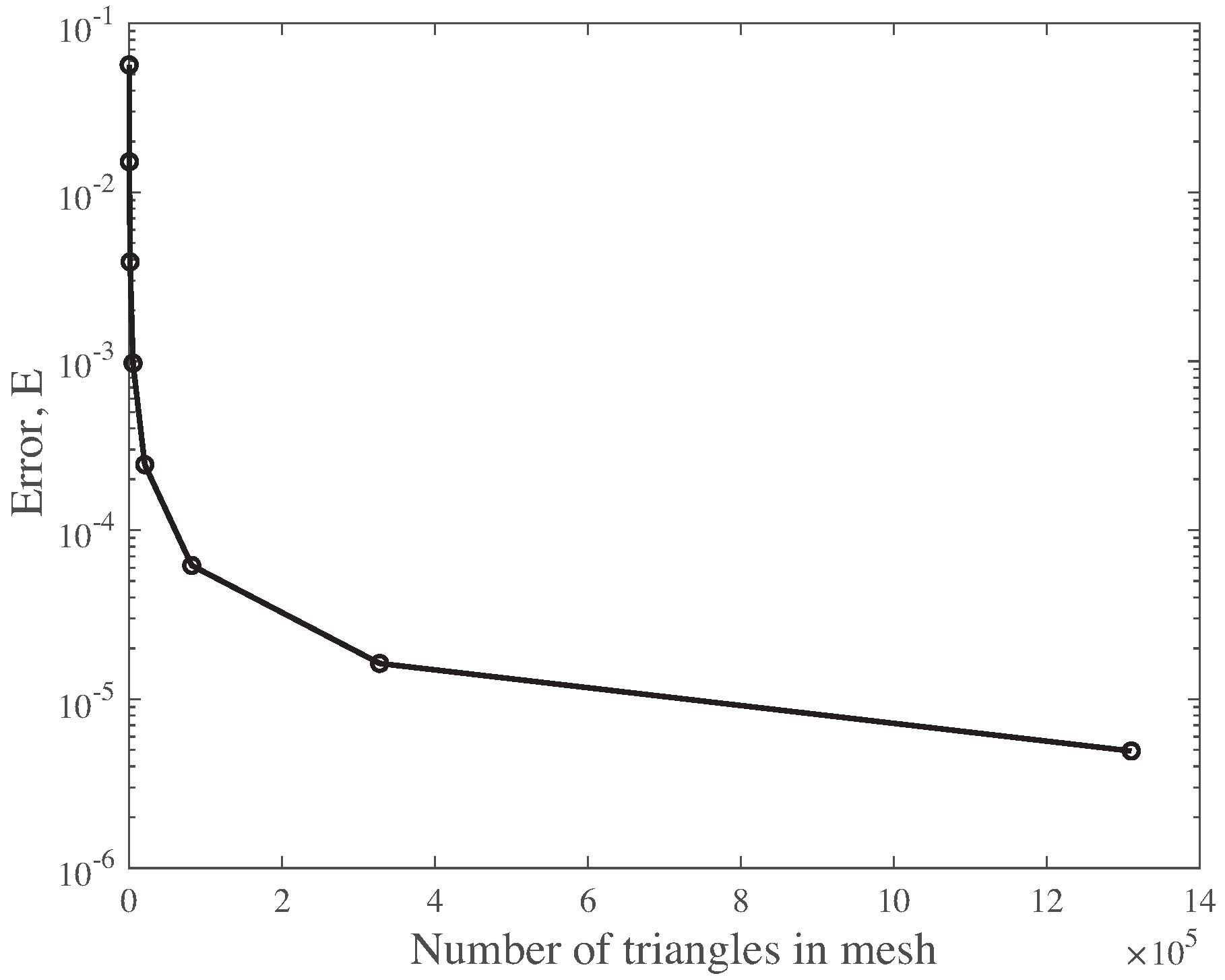
6.2. Accuracy of the Computed 3D Zernike Moments: Comparison with Exact Values
6.3. Reconstructing a Shape from its 3D Zernike Moments: Example of the Sphere
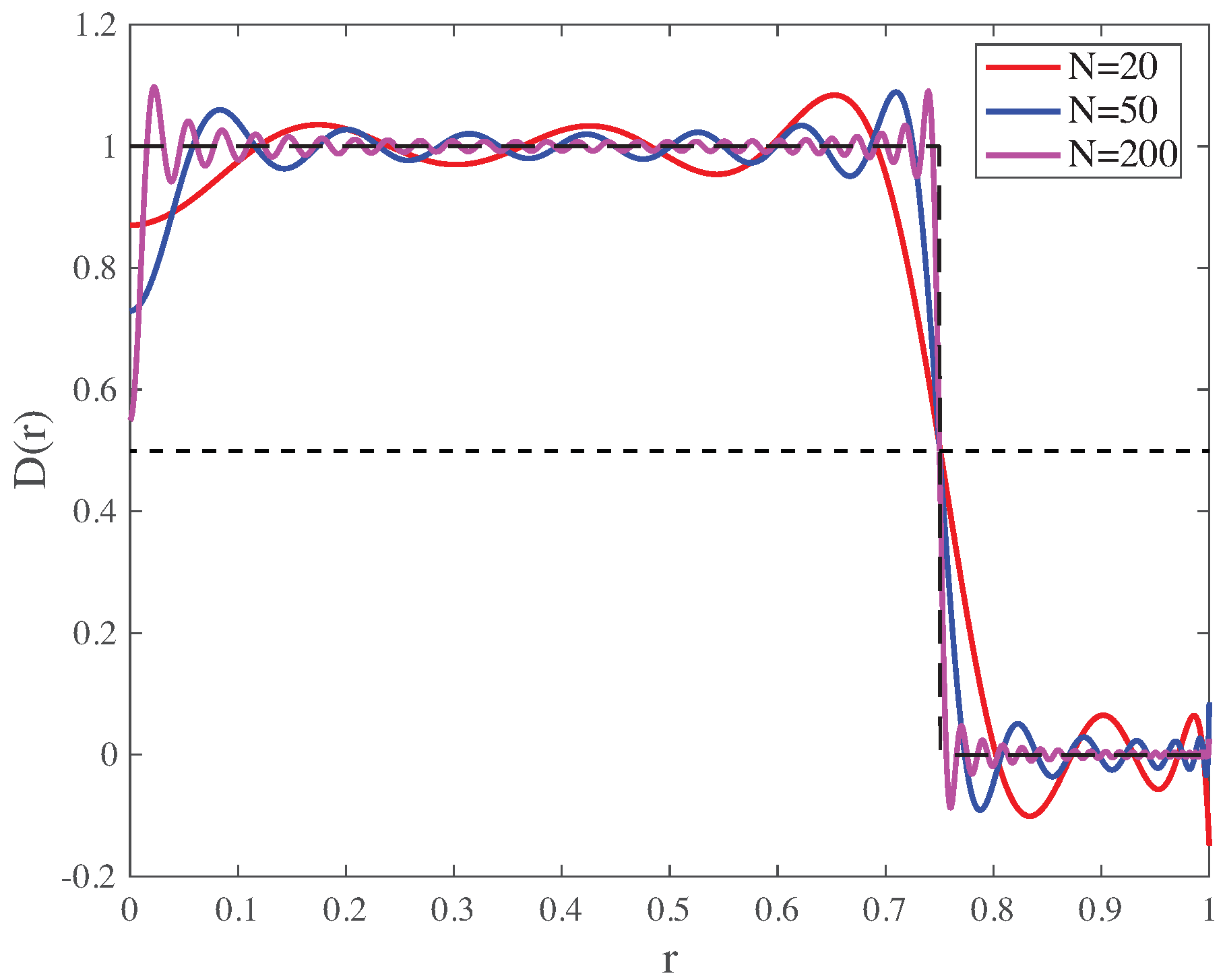
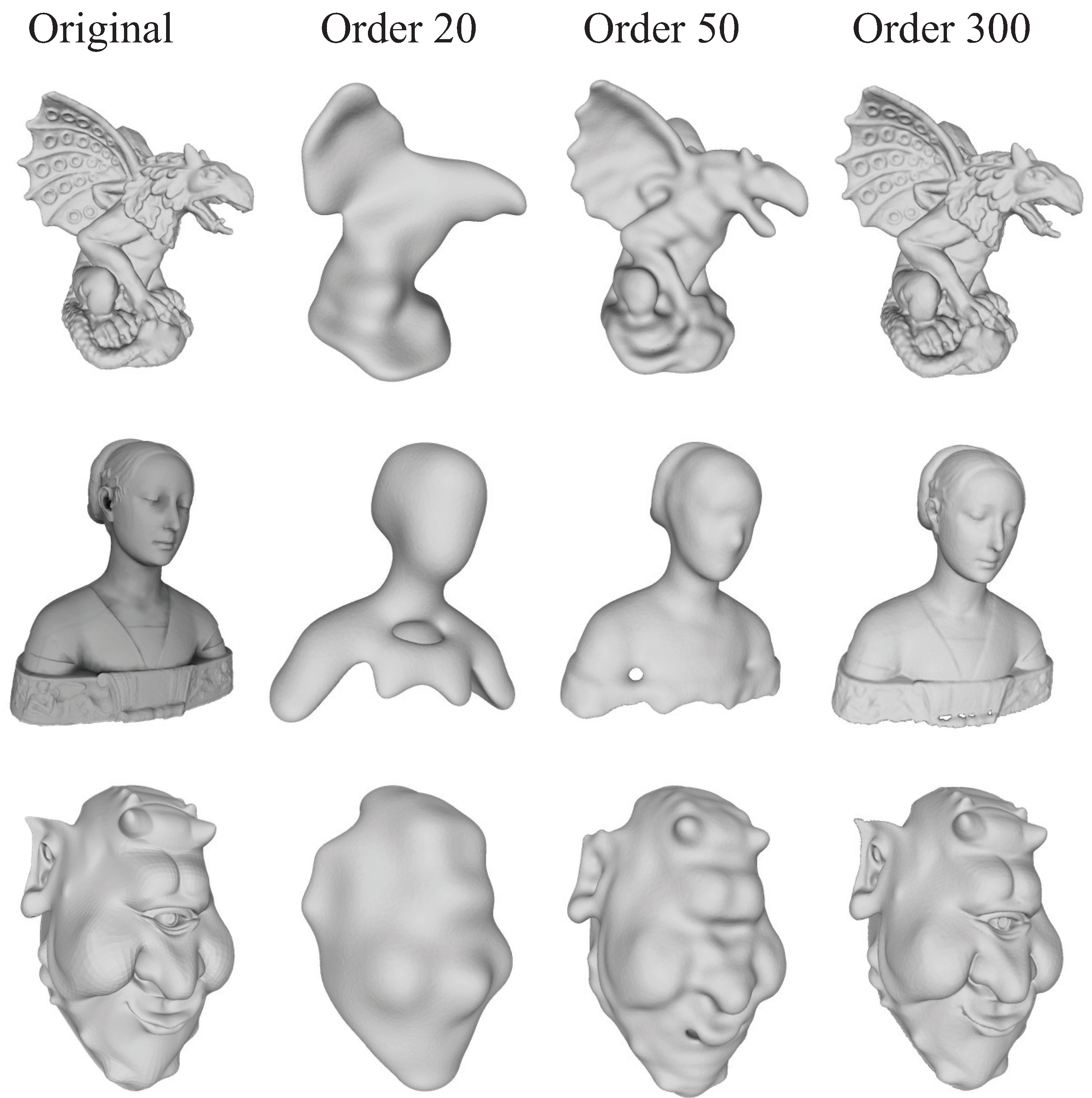
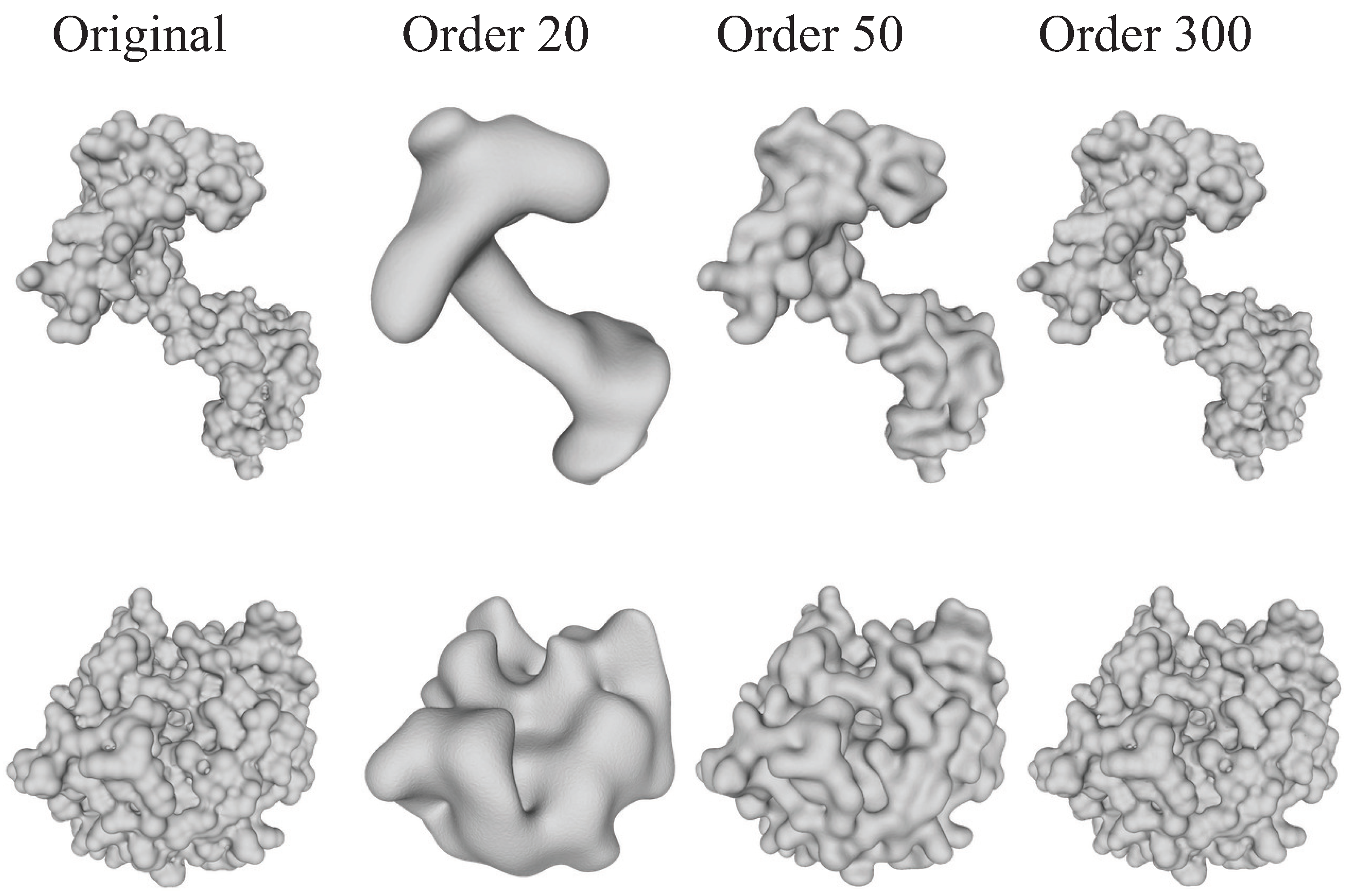
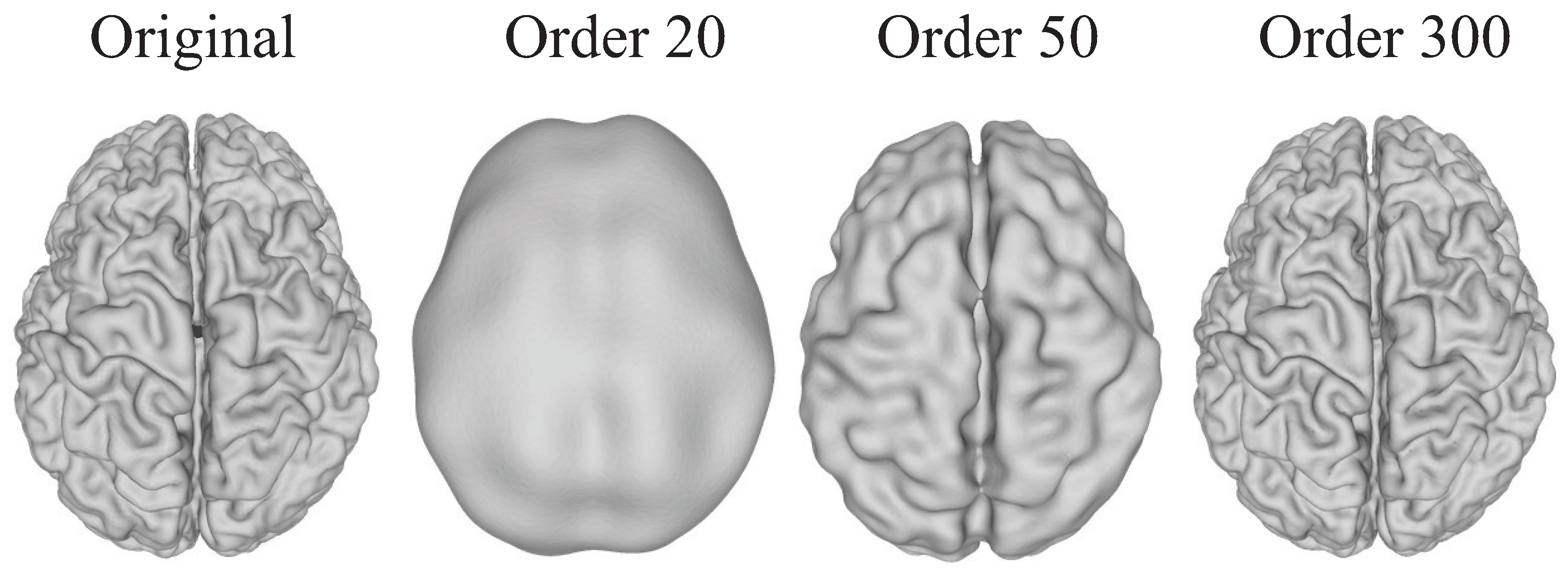
6.4. Reconstructing a Shape from Its 3D Zernike Moments: Importance of the Order N
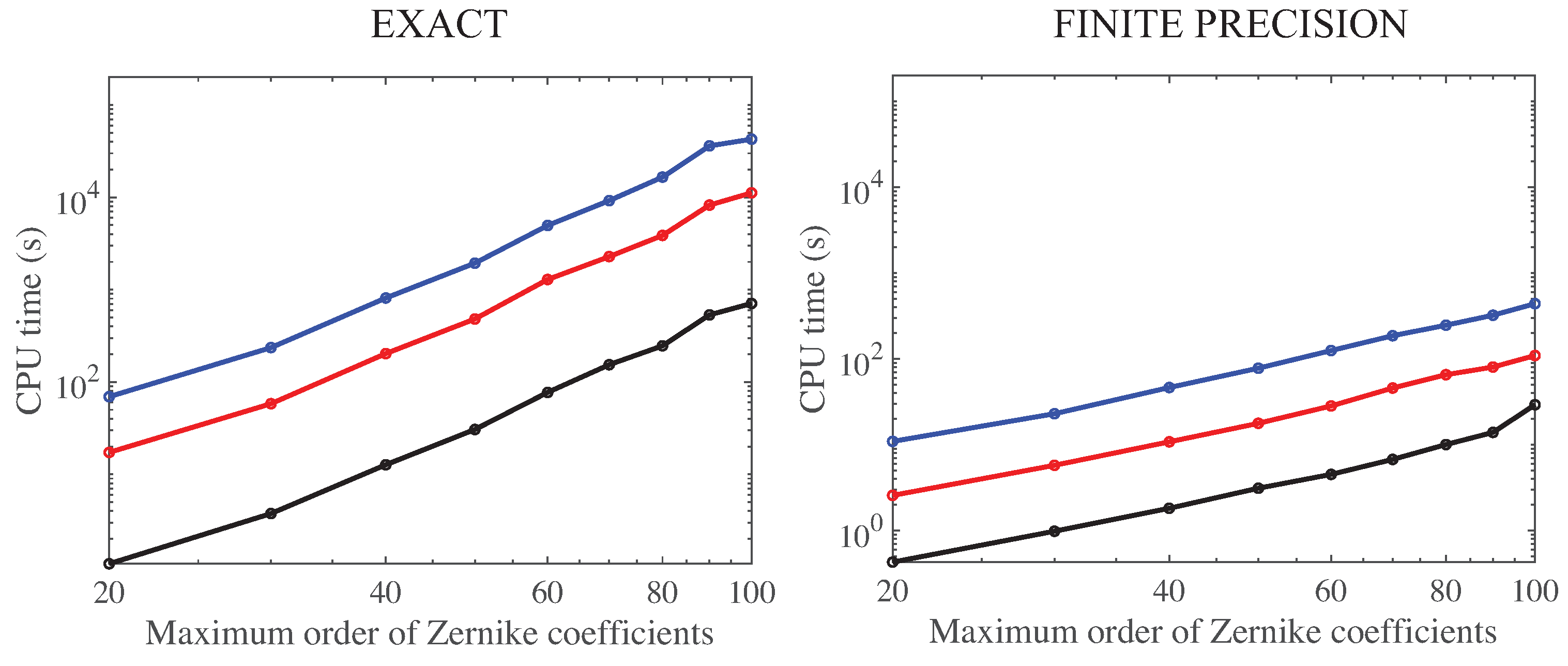
6.5. Computational Complexity for Geometric Moments and 3D Zernike Moments
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. A Recurrence for (r)
Appendix B. A Recurrence for (r)
Appendix C. Characteristics of the Triangle Quadrature Rules Used in This Work

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strength N | #Points | Bound | E |
|---|---|---|---|
| *3 | 4 | 4 | 1 |
| *5 | 7 | 7 | 1 |
| *7 | 13 | 12 | 0.92 |
| 9 | 19 | 19 | 1 |
| *11 | 28 | 26 | 0.93 |
| 13 | 37 | 35 | 0.95 |
| *17 | 60 | 57 | 0.95 |
| 21 | 87 | 85 | 0.98 |
| *25 | 120 | 117 | 0.98 |
| 31 | 181 | 176 | 0.97 |
| *37 | 255 | 247 | 0.97 |
| 43 | 348 | 330 | 0.95 |
| *51 | 501 | 460 | 0.92 |
| 65 | 814 | 737 | 0.91 |
| *73 | 1030 | 925 | 0.90 |
| 81 | 1263 | 1135 | 0.90 |
| *101 | 2007 | 1751 | 0.87 |
References
- Zelditch, M.; Swiderski, D.; Sheets, H. Geometric Morphometrics for Biologists. A Primer; Elsevier: Amsterdam, The Netherlands; Academic Press: London, UK, 2012. [Google Scholar]
- Peng, H. Bioimage informatics: A new area of engineering biology. Bioinformatics 2008, 24, 1827–1836. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khairy, K.; Howard, J. Spherical harmonics-based parametric deconvolution of 3D surface images using bending energy minimizations. Med. Image Anal. 2008, 12, 217–227. [Google Scholar] [CrossRef] [PubMed]
- Shamir, L.; Delaney, J.; Orlov, N.; Eckley, D.; Goldberg, I. Pattern recognition software and techniques for biological image analysis. PLoS Comput. Biol. 2010, 6, e1000974. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Toomre, D.; Bewersdof, J. A new wave of cellular imaging. Annu. Rev. Cell. Dev. Biol. 2010, 26, 285–314. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thompson, D. On Growth and Form; University Press: Cambridge, UK, 1917. [Google Scholar]
- Hu, M. Visual pattern recognition by moment invariants. IRE Trans. Infor. Theory 1962, 8, 179–187. [Google Scholar]
- Teague, M. Image analysis via the general theory of moments. J. Opt. Soc. Amer. 1980, 70, 920–930. [Google Scholar] [CrossRef]
- Teh, C.; Chin, R. On image analysis by the methods of moments. IEEE Trans. Pattern Anal. Mach. Intell. 1988, 10, 496–513. [Google Scholar] [CrossRef]
- Prokop, R.; Reeves, A. A survey of moment-based techniques for unoccluded object representation and recognition. Graph. Model. Image Process. 1992, 54, 438–460. [Google Scholar] [CrossRef] [Green Version]
- Hobson, E. The Theory of Spherical and Ellipsoidal Harmonics; Chelsea Co.: New York, NY, USA, 1955. [Google Scholar]
- Byerly, W.E. An Elementary Treatise on Fourier’s Series, and Spherical, Cylindrical, and Ellipsoidal Harmonics, with Applications to Problems in Mathematical Physics. In Proceedings of the Spherical Harmonics; Dover: New York, NY, USA, 1959; pp. 195–218. [Google Scholar]
- Kazhdan, M.; Funkhouser, T.; Rusinkiewicz, S. Rotation invariant spherical harmonic representation of 3D shape descriptors. In Proceedings of the Eurographics Symposium on Geometry Processing, Aachen, Germany, 23–25 June 2003. [Google Scholar]
- Medyukhina, A.; Blickensdorf, M.; Cseresnyés, Z.; Ruef, N.; Stein, J.V.; Figge, M.T. Dynamic spherical harmonics approach for shape classification of migrating cells. Sci. Rep. 2020, 10, 6072. [Google Scholar] [CrossRef] [Green Version]
- Zernike, F. Beugungstheorie des Schneidenver-fahrens und seiner verbesserten Form, der Phasenkontrastmethode. Physica 1934, 1, 689–704. [Google Scholar] [CrossRef]
- Nguyen, T.; Pradeep, S.; Judson-Torres, R.; Reed, J.; Teitell, M.; Zangle, T. Quantitative Phase Imaging: Recent Advances and Expanding Potential in Biomedicine. ACS Nano 2022, 16, 11516–11544. [Google Scholar] [CrossRef] [PubMed]
- Tahmasbi, A.; Saki, F.; Shokouhi, S. Classification of begnin anf malignant masses based on Zernike moments. Comput. Biol. Med. 2011, 41, 726–735. [Google Scholar] [CrossRef] [PubMed]
- Boland, M.; Murphy, R. A neural network classifier capable of recognizing the patterns of all major subcellular structures in fluorescence microscope images of HeLa cells. Bioinformatics 2001, 17, 1213–1223. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alizadeh, E.; Lyons, S.; Castle, J.; Prasad, A. Measuring systematic changes in invasive cancer cell shape using Zernike moments. Integr. Biol. 2016, 8, 1183–1193. [Google Scholar] [CrossRef] [PubMed]
- Toharia, P.; Robles, O.D.; Rodríguez, Á.; Pastor, L. A study of Zernike invariants for content-based image retrieval. In Proceedings of the Pacific-Rim Symposium on Image and Video Technology; Springer: Berlin/Heidelberg, Germany, 2007; pp. 944–957. [Google Scholar]
- Canterakis, N. 3D Zernike moments and Zernike affine invariants for 3D image analysis and recognition. In Proceedings of the 11th Scandinavian Conference on Image Analysis, Kangerlusssuaq, Greenland, 7–11 June 1999. [Google Scholar]
- Novotni, M.; Klein, R. 3D Zernike descriptors for content based shape retrieval. In Proceedings of the ACM Symposium on Solid and Physical Modeling, Seattle, WA, USA, 16–20 June 2003. [Google Scholar]
- Novotni, M.; Klein, R. Shape retrieval using 3D Zernike descriptors. Comput. Aided Des. 2004, 36, 1047–1062. [Google Scholar] [CrossRef]
- Wang, K.; Zhu, T.; Gao, Y.; Wang, J. Efficient terrain matching with 3-D Zernike moments. IEEE Trans. Aerosp. Elec. Sys. 2018, 55, 226–235. [Google Scholar] [CrossRef]
- Ma, B.; Zhang, Y.; Tian, S. Building Reconstruction Using Three-Dimensional Zernike Moments in Digital Surface Model. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Capalbo, V.; De Petris, M.; De Luca, F.; Cui, W.; Yepes, G.; Knebe, A.; Rasia, E. The Three Hundred project: Quest of clusters of galaxies morphology and dynamical state through Zernike polynomials. Mon. Not. R. Astron. Soc. 2021, 503, 6155–6169. [Google Scholar] [CrossRef]
- Sael, L.; Li, B.; La, D.; Fang, Y.; Ramani, K.; Rustamov, R.; Kihara, D. Fast protein tertiary structure retrieval based on global surface shape similarity. Proteins Struct. Func. Bioinfo. 2008, 72, 1259–1273. [Google Scholar] [CrossRef]
- Venkatraman, V.; Sael, L.; Kihara, D. Potential for protein surface shape analysis using spherical harmonics and 3D Zernike descriptors. Cell. Biochem. Biophys. 2009, 54, 23–32. [Google Scholar] [CrossRef]
- Ljung, F.; André, I. ZEAL: Protein structure alignment based on shape similarity. Bioinformatics 2021, 37, 2874–2881. [Google Scholar] [CrossRef]
- Guzenko, D.; Burley, S.; Duarte, J. Real time structural search of the Protein Data Bank. PLoS Comput. Biol. 2020, 16, e1007970. [Google Scholar] [CrossRef]
- Burley, S.; Bhikadiya, C.; Bi, C.; Bittrich, S.; Chen, L.; Crichlow, G.; Christie, C.; Dalenberg, K.; Di Costanzo, L.; Duarte, J.; et al. RCSB Protein Data Bank: Powerful new tools for exploring 3D structures of biological macromolecules for basic and applied research and education in fundamental biology, biomedicine, biotechnology, bioengineering and energy sciences. Nucl. Acids. Res. 2021, 49, D437–D451. [Google Scholar] [CrossRef] [PubMed]
- Berman, H.M.; Westbrook, J.; Feng, Z.; Gilliland, G.; Bhat, T.N.; Weissig, H.; Shindyalov, I.; Bourne, P. The Protein Data Bank. Nucl. Acids. Res. 2000, 28, 235–242. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aderinwale, T.; Bharadwaj, V.; Christoffer, C.; Terashi, G.; Zhang, Z.; Jahandideh, R.; Kagaya, Y.; Kihara, D. Real-time structure search and structure classification for AlphaFold protein models. Commun. Biol. 2022, 5, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Senior, A.; Evans, R.; Jumper, J.; Kirkpatrick, J.; Sifre, L.; Green, T.; Qin, C.; Žídek, A.; Nelson, A.; Bridgland, A.; et al. Improved protein structure prediction using potentials from deep learning. Nature 2020, 577, 706–710. [Google Scholar] [CrossRef]
- Jumper, J.; Evans, R.; Pritzel, A.; Green, T.; Figurnov, M.; Ronneberger, O.; Tunyasuvunakool, K.; Bates, R.; Žídek, A.; Potapenko, A.; et al. Highly accurate protein structure prediction with AlphaFold. Nature 2021, 596, 583–589. [Google Scholar] [CrossRef]
- Desantis, F.; Miotto, M.; Di Rienzo, L.; Milanetti, E.; Ruocco, G. Spatial organization of hydrophobic and charged residues affects protein thermal stability and binding affinity. Sci. Rep. 2022, 12, 12087. [Google Scholar] [CrossRef]
- Venkatraman, V.; Yang, Y.; Sael, L.; Kihara, D. Protein-protein docking using region-based 3D Zernike descriptors. BMC Bioinform. 2009, 10, 407. [Google Scholar] [CrossRef] [Green Version]
- Christoffer, C.; Chen, S.; Bharadwaj, V.; Aderinwale, T.; Kumar, V.; Hormati, M.; Kihara, D. LZerD webserver for pairwise and multiple protein–protein docking. Nucl. Acids. Res. 2021, 49, W359–W365. [Google Scholar] [CrossRef]
- Daberdaku, S.; Ferrari, C. Exploring the potential of 3D Zernike descriptors and SVM for protein–protein interface prediction. BMC Bioinform. 2018, 19, 35. [Google Scholar] [CrossRef]
- Daberdaku, S.; Ferrari, C. Antibody interface prediction with 3D Zernike descriptors and SVM. Bioinformatics 2019, 35, 1870–1876. [Google Scholar] [CrossRef]
- Di Rienzo, L.; Milanetti, E.; Alba, J.; D’Abramo, M. Quantitative characterization of binding pockets and binding complementarity by means of Zernike descriptors. J. Chem. Inform. Model. 2020, 60, 1390–1398. [Google Scholar] [CrossRef]
- Milanetti, E.; Miotto, M.; Di Rienzo, L.; Monti, M.; Gosti, G.; Ruocco, G. 2D Zernike polynomial expansion: Finding the protein–protein binding regions. Comput. Struct. Biotechnol. J. 2021, 19, 29–36. [Google Scholar] [CrossRef] [PubMed]
- Di Rienzo, L.; De Flaviis, L.; Ruocco, G.; Folli, V.; Milanetti, E. Binding site identification of G protein-coupled receptors through a 3D Zernike polynomials-based method: Application to C. elegans olfactory receptors. J. Comput. Aided Molec. Des. 2022, 36, 11–24. [Google Scholar] [CrossRef] [PubMed]
- Memmolo, P.; Pirone, D.; Sirico, D.; Miccio, L.; Bianco, V.; Ayoub, A.; Psaltis, D.; Ferraro, P. Single-cell phase-contrast tomograms data encoded by 3D Zernike descriptors. arXiv 2022, arXiv:2207.04854. [Google Scholar]
- Hosny, K.; Hafez, M. An algorithm for fast computation of 3D Zernike moments for volumetric images. Math. Probl. Eng. 2012, 2012, 353406. [Google Scholar] [CrossRef] [Green Version]
- Berjón, D.; Arnaldo, S.; Morán, F. A parallel implementation of 3D Zernike moment analysis. In Proceedings of the Parallel Processing for Imaging Applications, San Francisco, CA, USA, 24–25 January 2011; SPIE: Bellingham, WA, USA, 2011; Volume 7872, pp. 83–89. [Google Scholar]
- De Araújo, B.; Lopes, D.; Jepp, P.; Jorge, J.; Wyvill, B. A survey on implicit surface polygonization. ACM Comput. Surv. (CSUR) 2015, 47, 1–39. [Google Scholar] [CrossRef]
- Lorensen, W.; Cline, H. Marching cubes: A high resolution 3D surface construction algorithm. ACM Siggraph Comput. Graph. 1987, 21, 163–169. [Google Scholar] [CrossRef]
- Doi, A.; Koide, A. An efficient method of triangulating equi-valued surfaces by using tetrahedral cells. IEICE Trans. Infor. Sys. 1991, 74, 214–224. [Google Scholar]
- Treece, G.; Prager, R.; Gee, A. Regularised marching tetrahedra: Improved iso-surface extraction. Comput. Graph. 1999, 23, 583–598. [Google Scholar] [CrossRef]
- Lien, S.; Kajiya, J. Symbolic method for calculating the integral properties of arbitrary nonconvex polyhedra. IEEE Comput. Graph. Appl. 1984, 4, 35–41. [Google Scholar] [CrossRef]
- Pozo, J.; Villa-Uriol, M.C.; Frangi, A. Efficient 3D geometric and Zernike moments computation from unstructured surface meshes. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 471–484. [Google Scholar] [CrossRef] [PubMed]
- Koehl, P. Fast Recursive Computation of 3D Geometric Moments from Surface Meshes. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2158–2163. [Google Scholar] [CrossRef] [PubMed]
- Deng, A.W.; Gwo, C.Y. A Stable Algorithm Computing High-Order 3D Zernike Moments and Shape Reconstructions. In Proceedings of the 2020 4th International Conference on Digital Signal Processing, Chengdu, China, 19–21 June 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 38–42. [Google Scholar]
- Tough, R.J.A.; Stone, A.J. Properties of the regular and irregular solid harmonics. J. Phys. A 1977, 10, 1261–1269. [Google Scholar] [CrossRef]
- Mathar, R.J. Zernike basis to Cartesian transformations. arXiv 2008, arXiv:0809.2368. [Google Scholar] [CrossRef] [Green Version]
- Janssen, A. Generalized 3D Zernike functions for analytic construction of band-limited line-detecting wavelets. arXiv 2015, arXiv:1510.04837. [Google Scholar]
- Prata, A.; Rusch, W. Algorithm for computation of Zernike polynomials expansion coefficients. Appl. Opt. 1989, 28, 749–754. [Google Scholar] [CrossRef]
- Stroud, A. Approximate Calculation of Multiple Integrals; Prentice-Hall: Englewood Cliffs, NJ, USA, 1971. [Google Scholar]
- Xiao, H.; Gimbutas, Z. A numerical algorithm for the construction of efficient quadrature rules in two and higher dimensions. Comput. Math. Appl. 2010, 59, 663–676. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Cui, T.; Liu, H. A set of symmetric quadrature rules on triangles and tetrahedra. J. Comput. Math. 2009, 89–96. [Google Scholar]
- Witherden, F.; Vincent, P. On the identification of symmetric quadrature rules for finite element methods. Comput. Math. Appl. 2015, 69, 1232–1241. [Google Scholar] [CrossRef] [Green Version]
- Wolfram Research Inc. Mathematica, Version 13.1; Wolfram Research: Champaign, IL, USA, 2022. [Google Scholar]
- Cignoni, P.; Callieri, M.; Corsini, M.; Dellepiane, M.; Ganovelli, F.; Ranzuglia, G. MeshLab: An Open-Source Mesh Processing Tool. In Proceedings of the Eurographics Italian Chapter Conference; Scarano, V., De Chiara, R., Erra, U., Eds.; The Eurographics Association: Saarbrücken, Germany, 2008. [Google Scholar]
- Cheng, H.; Shi, X. Guaranteed Quality Triangulation of Molecular Skin Surfaces. In Proceedings of the IEEE Visualization, Austin, TX, USA, 10–15 October 2004; pp. 481–488. [Google Scholar]
- Cheng, H.; Shi, X. Quality Mesh Generation for Molecular Skin Surfaces Using Restricted Union of Balls. In Proceedings of the IEEE Visualization, Minneapolis, MN, USA, 23–28 October 2005; pp. 399–405. [Google Scholar]
- Chou, J.; Li, S.; Klee, C.; Bax, A. Solution structure of Ca(2+)-calmodulin reveals flexible hand-like properties of its domains. Nature Struct. Biol. 2001, 8, 990–997. [Google Scholar] [CrossRef] [PubMed]
- Edelsbrunner, H. Deformable Smooth Surface Design. Discret. Comput. Geom. 1999, 21, 87–115. [Google Scholar] [CrossRef] [Green Version]
- Alber, T.; Banner, D.; Bloomer, A.; Petsko, G.; Phillips, D.; Rivers, P.; Wilson, I. On the three-dimensional structure and catalytic mechanism of triose phosphate isomerase. Philos. Trans. R. Soc. Lond. B Biol. Sci. 1981, 293, 159–171. [Google Scholar] [PubMed]
- Olver, F.W.J.; Olde Daalhuis, A.B.; Lozier, D.W.; Schneider, B.I.; Boisvert, R.F.; Clark, C.W.; Miller, B.R.; Saunders, B.V.; Cohl, H.S.; McClain, M.A. (Eds.) NIST Digital Library of Mathematical Functions. Available online: https://link.springer.com/article/10.1023/A:1022915830921 (accessed on 23 September 2022).














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Houdayer, J.; Koehl, P. Stable Evaluation of 3D Zernike Moments for Surface Meshes. Algorithms 2022, 15, 406. https://doi.org/10.3390/a15110406
Houdayer J, Koehl P. Stable Evaluation of 3D Zernike Moments for Surface Meshes. Algorithms. 2022; 15(11):406. https://doi.org/10.3390/a15110406
Chicago/Turabian StyleHoudayer, Jérôme, and Patrice Koehl. 2022. "Stable Evaluation of 3D Zernike Moments for Surface Meshes" Algorithms 15, no. 11: 406. https://doi.org/10.3390/a15110406
APA StyleHoudayer, J., & Koehl, P. (2022). Stable Evaluation of 3D Zernike Moments for Surface Meshes. Algorithms, 15(11), 406. https://doi.org/10.3390/a15110406